
多舵面飞机电力作动系统协调控制策略研究
2015-03-15 12:04李成茂石山刘德鹏
飞行力学 2015年5期
李成茂, 石山, 刘德鹏
(空军工程大学 航空航天工程学院, 陕西 西安 710038)
多舵面飞机电力作动系统协调控制策略研究
李成茂, 石山, 刘德鹏
(空军工程大学 航空航天工程学院, 陕西 西安 710038)
随着大型飞机舵面结构布局的变化,传统的集中式结构飞控系统难以满足舵面协调过程中准确性的要求。为此引入多智能体的概念,将单个舵面等效为一个智能体,构建分布式电力作动系统的多智能体系统结构。采用联盟式体系结构,分别对联盟内部分体式舵面智能体的同步联动控制、不同联盟间舵面协调偏转控制进行控制策略的设计,并建立仿真模型。仿真结果表明,舵面能够准确地收敛到给定的舵面协调偏转状态,并且该策略能有效抑制舵面负载干扰引起的协调偏转率波动,解决了传统集中式飞控系统多舵面协调控制准确性不好的问题。
多舵面; 多智能体; 电力作动系统; 协调控制
0 引言
随着主动控制技术的发展,现代大型飞机大多具有多操纵面布局结构[1]。空客公司的A320 有5对扰流片、2对副翼和2对升降舵;A340有6对扰流片和4对副翼;A380则更进一步增加到8对扰流片。波音公司的飞机大部分也具有多操纵面布局结构,如B777的多块扰流片和襟翼[2]。多操纵面布局结构已经成为大型飞机的发展趋势。传统的集中式结构电传飞控系统难以满足舵面协调与管理过程中实时性、准确性的要求[3],为此,国内外一些技术验证机及新一代飞机逐步采用分布式电传飞控系统的结构设计。多智能体系统具有较好的灵活性和适应性,能够通过智能体局部的智能行为以及对多信息融合实现整体资源的优化,并能动态地适应任务需求来保持操作的响应。本文主要将多智能体技术应用到飞机电力作动系统控制结构与控制方法的改进中,构建分布式电力作动系统的多智能体系统结构,以探索是否能满足多操纵面布局协调性的要求。
1 智能体的结构设计
国外许多先进飞机逐步采用了多操纵面设计(如空客A380[4]),即将一个传统的单体式舵面分成几个小的分体式舵面,每个小的分体式舵面可由独立的电力作动器驱动,从而降低了对单台电力作动器的可靠性、体积、散热等的要求。
1.1 单个智能体结构设计
每个舵面均由控制器、驱动电机、传动装置等电力作动器组成,将单个舵面等效为一个智能体,各组成部分间的关系如图1所示。
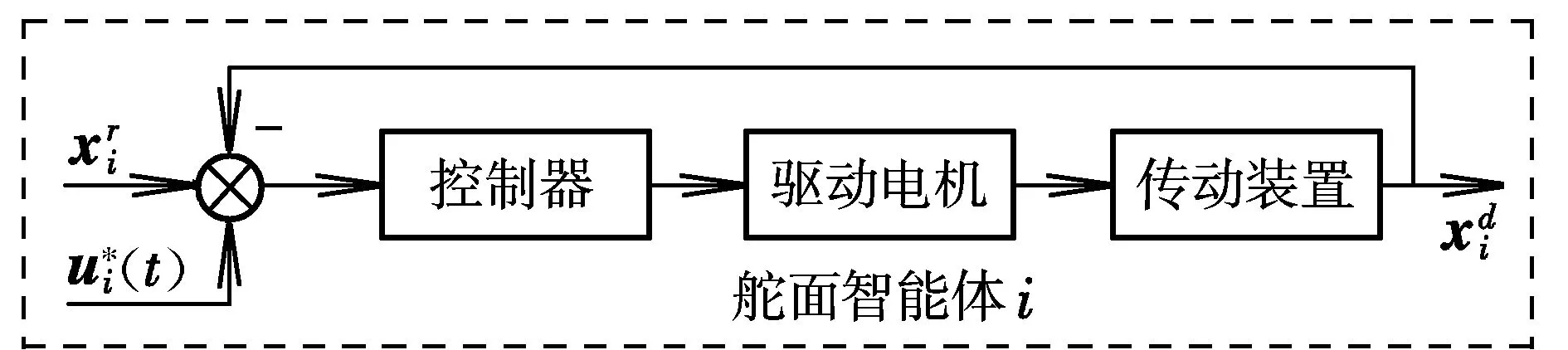
图1 舵面智能体的基本组成Fig.1 Component of control surface agent

舵面智能体应具有高度的自规划、自组织、自适应能力,以适应复杂动态环境中的工作,使其在能够完成自身舵面偏转驱动的前提下,通过与其他舵面智能体的通信协作,提升舵面电力作动系统整体的协调控制性能。舵面智能体主要由环境感知模块、通信模块、执行模块、控制模块、规则库等功能模块组成,其功能框图如图2所示。

图2 舵面智能体的功能框图Fig.2 Functional block diagram of control surface agent
1.2 多智能体系统的结构设计
以单个舵面智能体为基础,引入多智能体系统的概念,构建分布式电力作动系统的多智能体系统结构。本文采用联盟式的多智能体系统体系结构,对电力作动系统的多智能体系统结构进行了设计,如图3所示。图中:智能体间的连线代表通信的路径;箭头代表信息传递的方向。
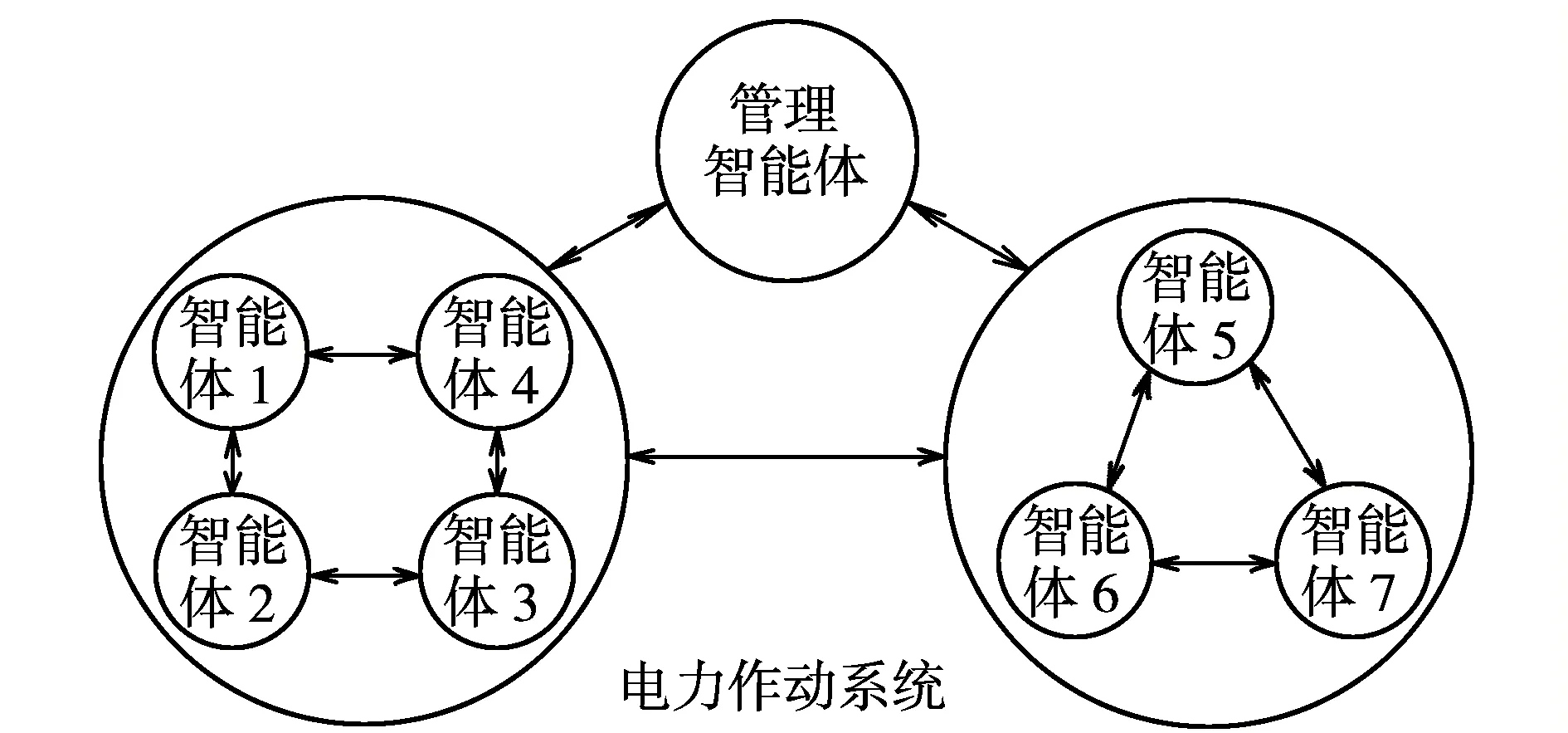
图3 电力作动系统的多智能体系统结构Fig.3 The structure of multi-agent electromechanical actuation system
联盟内部舵面智能体的确定主要依据舵面安装的特点,即将同一个舵面内的各分体式舵面组成同一个联盟,各分体式舵面均由独立的电力作动器驱动,视为一个独立的智能体,各分体式舵面智能体地位平等且相互独立,彼此间通过分布式的局部通信实现信息的交互与协作。不同联盟间通过协助智能体进行远程通信,以实现信息的交互与协作,协助智能体可以由联盟内部任意分体式舵面智能体担任。不同联盟间协作关系的确定由上层管理智能体(飞控计算机或飞行控制与伺服控制分离下的电力作动器智能控制中心)根据飞机当前飞行状态所需操纵舵面决定,是动态变化的。
2 协调控制策略设计
2.1 分体式舵面同步联动控制策略
对于由n个分体式舵面智能体组成的舵面多智能体系统,各分体式舵面智能体通过总线互连,并在局部分布式通信的基础上,以舵面偏转角度为协调变量,通过相互协作实现舵面偏转角度的同步联动,以取得原单体式舵面偏转的气动效益。
定义协调变量为舵面偏转角度θ,θi(t)为t时刻第i个分体式舵面智能体节点状态,一致性分散化协调控制策略可以表示为:
(1)
式中:γi为有向图中边的加权系数;Ni为与第i个分体式舵面智能体节点所能获相邻分体式舵面智能体信息的状态集合;gij为Ni相对应的通信连接关系,其表示为:
分体式舵面智能体协调的目标是使彼此间的信息状态或行为达到一致,即各分体式舵面的偏转能够实现同步。对于任意分体式舵面智能体节点i,j,如果满足式(2),则称i,j能够协调一致,即:

(2)
图3所示舵面多智能体系统协调控制结构,为任意节点相互可达的强连通图,且含有有向生成树,分散化协调控制策略一致性收敛,即各分体式舵面智能体的偏转角度动态收敛到γi的加权平均值:
(3)
由以上分析可以得出,在满足图3所示的协调控制结构及式(1)的分散化协调策略的基础上,舵面作动系统的所有分体式舵面的偏转角度能够动态收敛到式(3)所示的输出结果,亦即分体式舵面能够动态的实现同步联动。
2.2 舵面协调控制策略
θA(t)=kθB(t)
(4)
式中:θA(t),θB(t)分别为t时刻不同舵面的偏转角度;k∈R为舵面协调偏转率。考虑A,B舵面系统分别为由nA,nB个分体式舵面智能体组成的多智能体系统,不考虑舵面间协调控制时,由式(1)可知,A,B舵面系统各自的分散化协调控制策略分别为:
(5)
对于不同的联盟,A,B舵面多智能体系统均为含有有向生成树的强连通图,则由式(3)可知,A,B舵面系统的任意分体式舵面智能体节点的偏转角度分别动态收敛于:
(6)
当舵面内所有智能体状态信息趋于一致,即舵面内所有分体式舵面均为同步联动,则任意分体式舵面智能体均能代表舵面的信息状态,即:
(7)
考虑舵面间协调控制的目的是使A,B舵面偏转角度满足式(4),亦即:

(8)
则式(5)中的分散化协调控制策略需调整为:
(9)
其中:
随着信息技术发展速度的加快,现下社会的发展已离不开信息技术。教学的本质是为社会发展培养高素养、高能力人才,在小学开展信息技术课程可以培养学生的信息素养,全面提升学生综合素养,为学生以后的成长和发展打下良好基础。在新课程背景下,小学信息技术课程教学面临着更大的挑战,教师要打破传统的教学思维和模式,进行创新教育,突出实践教学的重要性,培养和提升学生的实践操作能力。另外,教师还要提升教学效率和教学质量,激发学生的学习兴趣,培养和提升学生的主动学习能力,为学生以后的学习和发展做好铺垫。下文将简要探讨小学信息技术创新教育的重要性,以及探究新课程背景下小学信息技术创新教育的有效对策。
式中:i=4,j=3分别为图3中A,B舵面多智能体系统协助智能体的个数;uA(t),uB(t)分别为舵面间的协调项,用于协调不同舵面的偏转角度,可以用如下公式表示:
(10)
令:
则满足图3所示舵面通信结构的舵面多智能体系统能够实现协调控制。
3 仿真试验
3.1 仿真模型
假设所有舵面均由机电作动器驱动,在Matlab/Simulink中搭建机电作动器的仿真模型,搭建了A,B舵面电力作动系统及其协调控制的系统仿真模型。舵面A协调控制仿真模型由4个分体式舵面仿真模块组成,构成舵面A联盟式多智能体系统结构。模型的建立主要借鉴了多电机相邻偏差耦合控制的结构[6],同步控制器为速度前馈PID控制器,偏差补偿控制器为PID控制器。联盟内部分体式舵面智能体通过分布式的局部通信进行协作,以实现同步联动。
舵面A,B组成的电力作动系统协调控制仿真模型中,不同的舵面模型代表不同的联盟,不同联盟间通过协助分体式舵面智能体进行远程通信,以一定的协调偏转率进行舵面偏转角度的协调偏转。仿真模型中取协调控制器为PID控制器。
假设机电作动器与舵面通过铰链连接,机电作动器直线位移与舵面偏转角度的关系为M=5 (°)/mm[7]。考虑舵面电力作动系统的协调性会受各传动轴的驱动特性不匹配、负载的扰动、电机参数变化等因素的影响,而机电作动器的工作特性主要由驱动电机表征,各舵面电力作动系统驱动电机取不相同的工作参数,用以模拟不同舵面电力作动系统在实际工作过程中存在的差异。
3.2 分体式舵面同步联动控制试验
图4为输入阶跃指令信号未进行协调控制时,舵面A各分体式舵面偏转角度仿真曲线。从图中可以看出,由于驱动电机转子端等效负载转矩、阻尼系数等参数的差异,舵面A中各分体式舵面的偏转角度存在一定的偏差,没有满足同步联动的作动要求,降低了舵面的气动效益。图5为进行协调控制时,舵面A各分体式舵面偏转角度仿真曲线,图中舵面A各分体式舵面偏转角度协调一致,具有较好的同步联动控制性能。
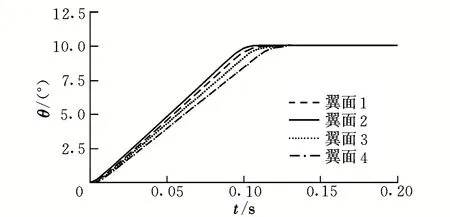
图4 未进行协调控制时舵面A分体式舵面偏转角度曲线Fig.4 Split type control surface deflection angle curves of control surface A without coordinated control
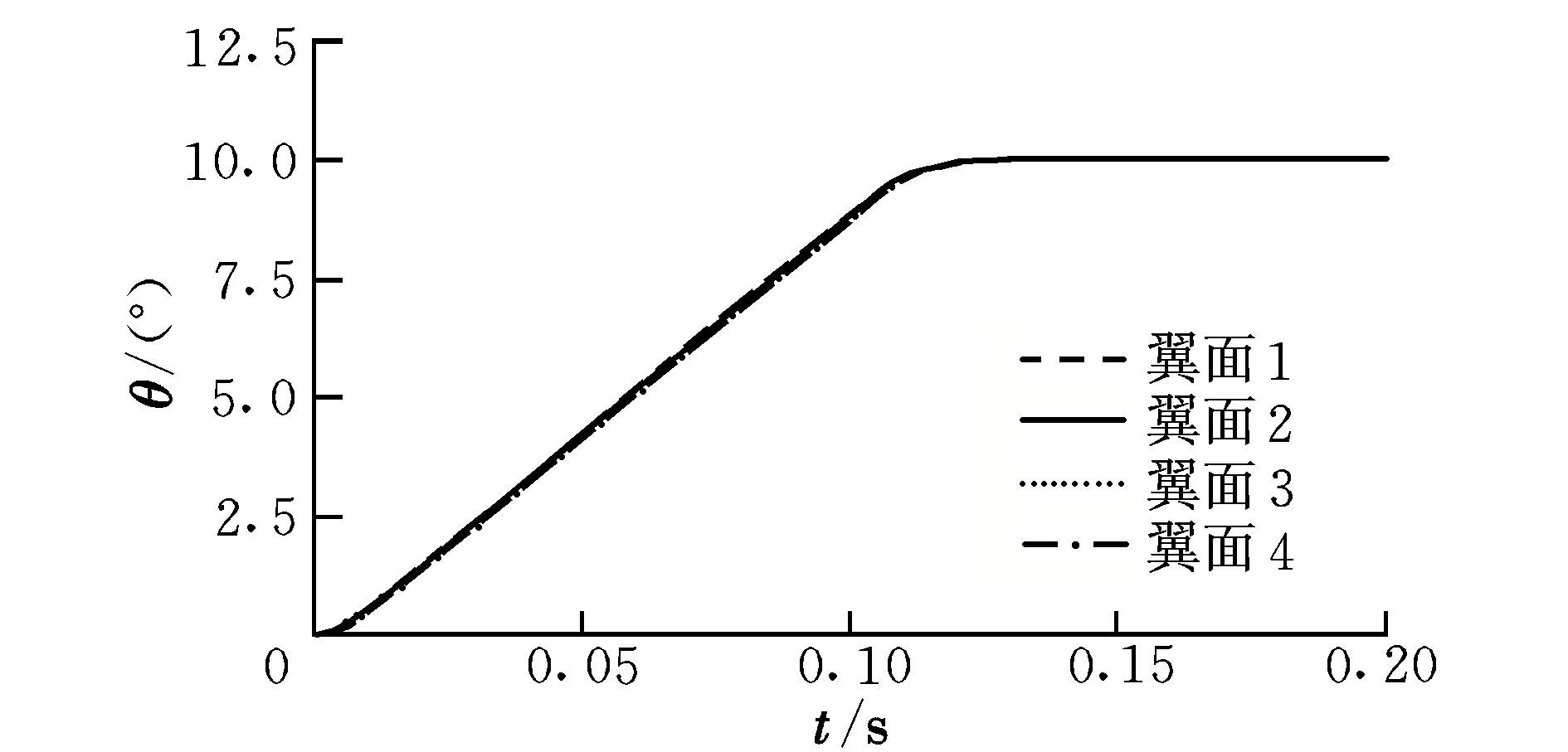
图5 协调控制时舵面A分体式舵面偏转角度曲线Fig.5 Split type control surface deflection angle curves of control surface A with coordinated control
图6为两种控制方式下,舵面A中分体式舵面2,4偏转角度偏差对比曲线。可以看出,进行协调控制时二者间的偏差要明显小于未进行协调控制,从而证明本文所设计的分体式舵面同步联动控制策略能够改善分体式舵面的同步偏转性能,提高分体式舵面偏转的气动效益。
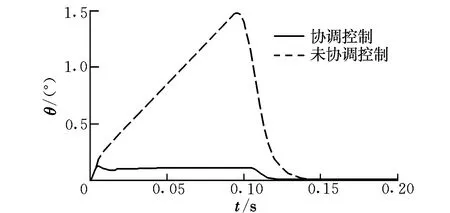
图6 分体式舵面2,4偏转角度偏差对比曲线Fig.6 Deflection angle deviation curves of split type control surface 2 and 4
3.3 舵面协调控制试验
取舵面协调偏转率k=2,输入斜坡指令信号,斜率分别为:RA=18,RB=9,舵面内各分体式舵面协调控制,并在0.1 s时给舵面A中分体式舵面2突加模拟负载。任取舵面A,B中一分体式舵面偏转状态表征舵面A,B实际偏转,舵面间不进行协调控制和进行协调控制的偏转角度仿真曲线如图7和图8所示。
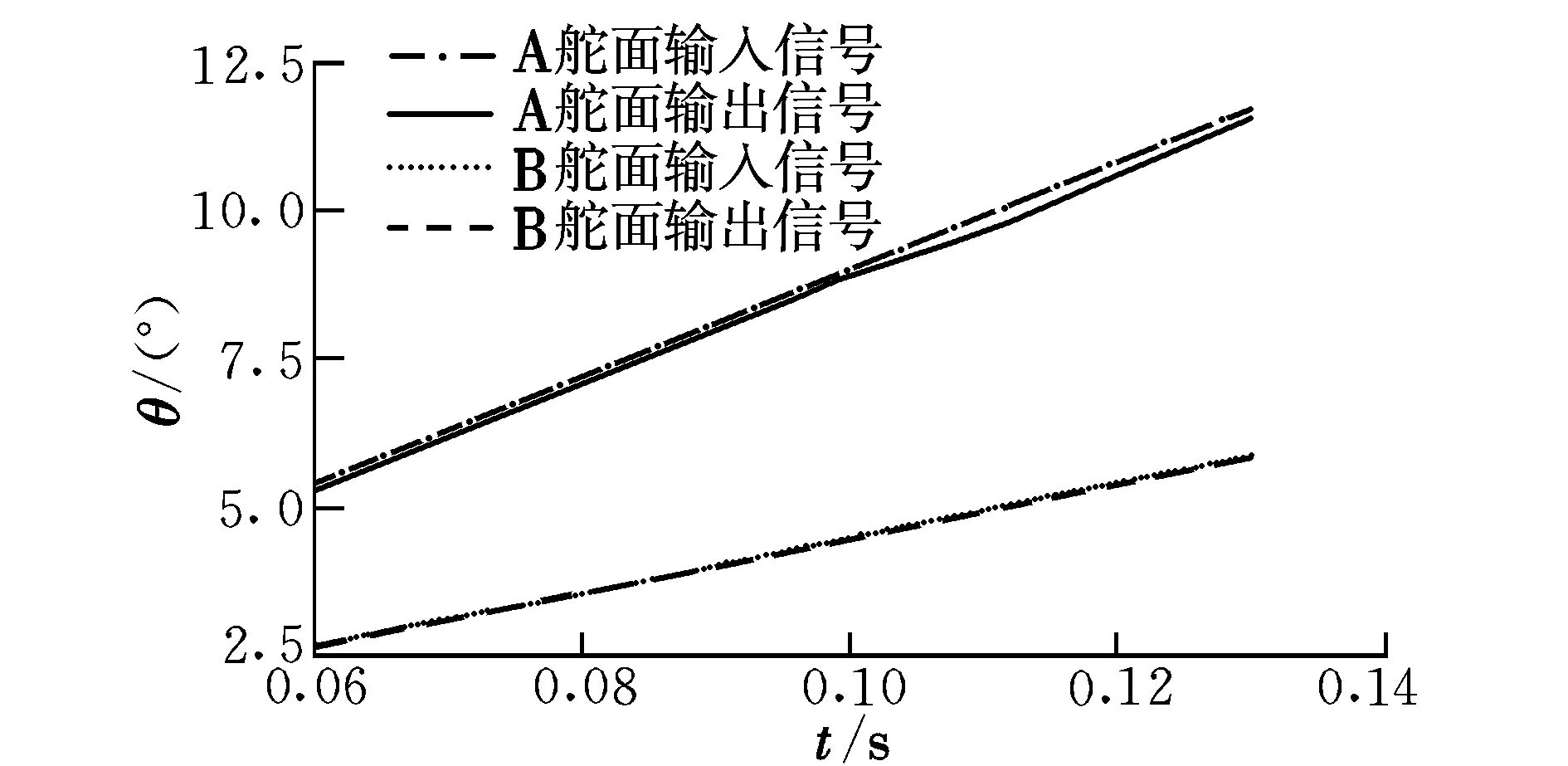
图7 未进行协调控制时A,B舵面偏转角度曲线Fig.7 Deflection angle curves of control surface A and B without coordinated control
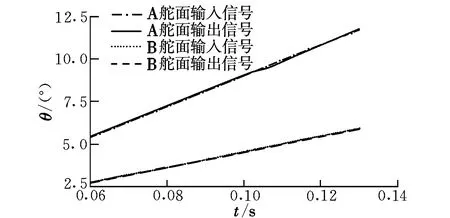
图8 协调控制时A,B舵面偏转角度曲线Fig.8 Deflection angle curves of control surface A and B with coordination control
从图7中可以看出,舵面间未进行协调控制时,舵面A偏转角度曲线无法准确跟踪指令信号,且易受负载扰动的影响,舵面B则能较好地跟踪指令信号,但舵面A受扰动引起的偏转状态的变化无法传递到舵面B中。图8中,舵面间进行协调控制,舵面A偏转角度曲线较好地跟踪指令信号,并通过与舵面B的协作有效地抑制了舵面负载扰动对舵面偏转的影响。
图9为两种控制方式下,舵面协调偏转率的对比曲线。可以看出,采用协调控制的舵面协调偏转率曲线能够更加快速、准确地收敛到给定的舵面协调偏转状态,并能有效抑制舵面负载干扰引起的协调偏转率波动。结果表明,舵面协调控制策略提高了舵面协调偏转的准确性。

图9 协调偏转率k对比曲线Fig.9 Curves of deflection rate k
4 结束语
本文根据多舵面飞机电力作动系统结构特征,结合多智能体系统构建分体式电力作动系统的多智能体系统结构,并设计了分体式舵面同步联动控制策略及舵面偏转控制策略。本文提出的协调控制策略提高了多舵面电力作动系统协调控制的准确性;由于各舵面作动节点均为智能体,能够自主地进行通信协作,该控制策略也能有效地提高舵面电力作动系统的智能性及自动化程度。此外,本文仅针对两个舵面的协调控制进行了研究,但研究成果完全可以适用于多个舵面协调控制的情况。
[1] 严仰光,秦海鸥,龚春英,等.多电飞机与电力电子[J].南京航空航天大学学报,2014,46(1):11-18.
[2] Chakraborty I,Jackson D,Trawick D,et al.Electric control surface actuator design optimization and allocation for the more electric aircraft[R].AIAA-2013-4283,2013.
[3] 占正勇,刘林.分布式电传飞行控制系统结构发展分析[J].飞行力学,2009,27(6):1-4.
[4] 张巍,朱耀忠.“多电”控制舵面作动器——下一代运输机的一个方案[J].电力电子,2006(4):15-18.
[5] Wang J,Xin M.Flocking of multi-agent system using a unified optimal control approach[J].Journal of Dynamic Systems,Measurement,and Control,2013,135(6):5-11.
[6] 刘艳.多电机同步控制系统控制策略研究[D].沈阳:沈阳工业大学,2013.
[7] Chakraborty I,Jackson D,Trawick D,et al.Development of a sizing and analysis tool for electro hydrostatic and electromechanical actuators for the more electric aircraft[R].AIAA-2013-4282,2013.
(编辑:李怡)
《飞行力学》正式开通在线办公系统
为加快科技期刊信息化建设步伐,实现期刊数字化出版和网络化传播,《飞行力学》编辑部于2015年8月已正式开通在线办公系统(网址为:http://fhlx.cbpt.cnki.net)。该系统具有作者在线投稿、编辑在线采编、专家在线审稿等功能。
投稿过程简单方便。首次在线投稿时,请先在该网站进行注册,并按要求填写相关信息,注册成功后方可投稿。投稿时,请务必认真阅读《征稿简则》、《版权协议》等资料,然后按要求填写并上传《版权协议》,同时上传原稿全文和保密审查证明。
欢迎大家使用作者投稿系统。投稿过程中,若遇到其他疑问请联系编辑部(Tel:029-86838449;Email:fxlxbjb@163.com)进行咨询。
《飞行力学》编辑部
Research on coordinated control strategy of electromechanical actuation system for multiple control surfaces aircraft
LI Cheng-mao, SHI Shan, LIU De-peng
(Aeronautics and Astronautics Engineering College, AFEU, Xi’an 710038, China)
With the changes in the structure of the layout of large aircraft control surfaces, the traditional centralized structure of the flight control system can not meet accuracy requirements in the rudder coordination process. To solve this problem, the concept of multi-agent was introduced and a single rudder was equivalent to an intelligent agent to build a distributed multi-agent system structure of electromagnetic actuation system. The coordinated control strategy of split type actuator synchronous linkage control and the control surface coordinated control respectively were designed with federated architecture, and the simulation model was established. Simulation results show that the rudder can accurately converge to a given coordinate rudder deflection state, and the strategy effectively suppress interference caused by fluctuations in load rudder deflection rate coordination, solved the problem of poor coordinated control surface accuracy of traditional flight control system.
multiple control surfaces; multi-agent; electromechanical actuation system; coordinated control
2015-01-12;
2015-04-30;
时间:2015-06-24 15:03
李成茂(1990-),男,湖北黄石人,硕士研究生,研究方向为飞行控制及仿真。
V227
A
1002-0853(2015)05-0476-05
猜你喜欢
装备环境工程(2022年9期)2022-10-13
玩具世界(2022年2期)2022-06-15
兵器装备工程学报(2021年12期)2022-01-11
选煤技术(2021年6期)2021-04-19
铁道通信信号(2020年11期)2020-02-07
汽车与新动力(2019年5期)2019-11-07
智富时代(2019年2期)2019-04-18
智富时代(2019年2期)2019-04-18
科学与财富(2018年1期)2018-03-03
工程建设与设计(2016年4期)2016-02-27
