基于拔销器锁定的飞行器气动控制面解锁控制方法
2022-01-11 04:30赵晓宁周国峰
兵器装备工程学报 2021年12期
姚 旺,赵晓宁,周国峰,孙 峥,雷 豹
(中国运载火箭技术研究院, 北京 100076)
1 引言
大气层内飞行器一般具有多个可转动的气动控制面,根据气动布局的不同可以是舵面或翼面,用于提供气动控制力及控制力矩。根据工作时序的设计,飞行器飞行过程中的某些时段内,这些气动控制面需要保持固定转角,其余时段则需要进行转角的动态控制。因此,在舵面或翼面保持固定转角的飞行时段,需要设计专门的锁定机构实现对气动控制面的锁定,并根据需要在特定的时间点进行解锁,随后即可对舵面或翼面转角实施控制[1-3]。可靠的锁定与解锁技术是保证飞行控制品质的前提,尤其是随着变形飞行器等新概念飞行控制技术的发展,使得飞行器舵面或翼面的锁定与解锁技术在飞控系统中更为关键[4-7],很有必要对其相关的工作机制开展理论和试验研究。
当前,飞行器舵面或翼面的锁定主要采用舵面或翼面锁定和伺服机构锁定2种方式。舵面或翼面锁定一般采用机械式的拔销器锁定方案,在锁定时利用拔销器的锁销约束舵面或翼面,在解锁时解除销轴对舵面或翼面的约束,即可使得舵面或翼面自由摆动;伺服机构锁定方式通过在伺服系统内部设计电机锁,通过电控手段锁定伺服作动器内部的电机,使得电机不能转动,进而实现舵面或翼面的锁定。以上2种锁定方式均可以实现飞行器舵面或翼面的可靠锁定,相比之下伺服机构锁定方式需要在伺服系统内部设计电机锁,一方面会增大伺服系统体积,不利于在空间约束强的小型飞行器中使用;另一方面,其锁定的可靠性低于机械式的拔销器销轴锁定方案,易出现不可靠锁定的问题[8-12]。因此,本文主要研究机械式拔销器锁定方案。
传统的机械式拔销器解锁方法为保证可靠性,通常一路舵面或翼面需要两路时序资源,且拔销器销轴缩回的过程中易出现与舵面或翼面卡滞的问题,同时在判断解锁状态时一般需要增加额外的硬件资源(例如行程开关等)。针对以上问题,本文从以下几个方面开展研究工作:① 提出了一种基于关键时间点的气动控制面锁定状态查询方法,用于实现锁定状态的可靠查询与获取;② 设计了一种拔销器驱动线路综合冗余设计方案,利用少量的驱动资源实现飞行器多路舵面或翼面的可靠解锁;③ 通过设计销器解锁时刻与舵面或翼面受控时刻的精确配合时序,有效防止解锁过程中出现销轴卡滞;④ 提出了一种简易的解锁状态判定方法,不依托额外的硬件资源实现了飞行器舵面或翼面解锁状态的可靠判定。最后,通过地面原理性试验验证了方法的正确性。
2 机械式拔销器锁定方案
基于机械式拔销器的飞行器舵面或翼面锁定原理如图1所示。在锁定状态,通过将拔销器的销轴插入至舵面或翼面的销孔中,利用销轴实现对舵面或翼面的约束;解锁时,为拔销器设计电气驱动信号,拔销器中的换能元将电能转化为热能,引燃始发装药,经过输出装药能量放大,最终产生高温高压气体进入拔销器的容腔内,推动销轴剪断止动销的限制,克服加载在销轴上的载荷,使销轴回缩。销轴在回缩规定距离后,由止退结构锁定,实现解除锁定过程不可逆。拔销器销轴缩回后,舵面或翼面的约束解除,可以受控进行自由转动。
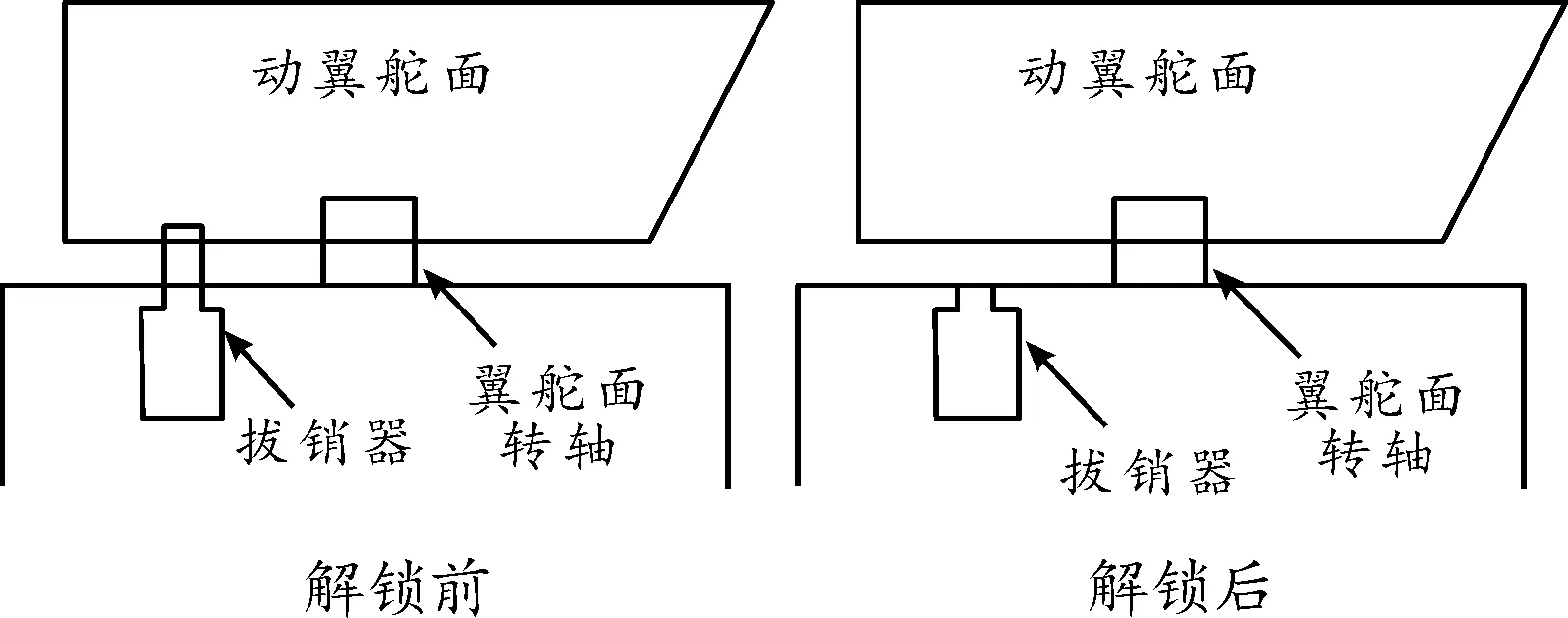
图1 舵面或翼面锁定原理示意图Fig.1 Principle of rudder or wing locking
3 舵面或翼面解锁控制方法
3.1 舵面或翼面锁定状态查询
为防止飞行器锁定的舵面或翼面意外解锁带来危害,在飞行器发射前或舵面或翼面解锁前,一般需要监测舵面或翼面的锁定状态。实时查询舵面或翼面锁定状态将带来极大的系统资源消耗,同时可能带来误判舵面或翼面解锁的风险。为此,本文设计了一种舵面或翼面锁定状态的查询方法,其查询流程如图2所示。在飞行器飞行程序中选取多个关键时间点,在这些时间点上进行锁定状态查询。关键时间点的选取需要结合飞行器舵面和翼面解锁前的飞行程序,至少应包含上电自检时刻和解锁前时刻,以确保飞行器上电时刻和解锁前时刻舵面和翼面处于锁定状态,其余关键时间点可根据具体飞行程序选取,一般结合飞行器其余动作一并开展(例如初始对准等),时间间隔不宜过于密集,避免增加额外的误判风险。

图2 舵面或翼面锁定状态查询流程示意图Fig.2 Inquiry process of rudder or wing locking status
在特定的时间点进行舵面或翼面锁定状态查询时,一般基于当前舵面或翼面的摆角进行判定。由于舵面或翼面下缘开孔与拔销器销轴之间存在间隙,因此锁定状态的舵面或翼面仍会存在小角度的摆角。假设舵面或翼面在锁定状态的极限摆角为θ,考虑到舵面或翼面转角位置的采样误差,判断舵面或翼面锁定的判据需要设计为θ+Δθ(根据经验Δθ一般取值在0.5°~2°之间)。
综上所述,在飞行器上电时刻、关键节点、舵面或翼面解锁前等时刻,可以连续多次获取舵面或翼面当前的摆角,若全部舵面或翼面的当前摆角θ0均未超过θ+Δθ,则判定舵面或翼面处于可靠锁定状态;若某次θ0超过θ+Δθ,则判定为舵面或翼面未正常锁定,转为执行相应的安全性设计措施。
3.2 拔销器驱动线路设计
为保证飞行器舵面或翼面的可靠解锁,拔销器需要设计为双路冗余电流驱动控制,只需任意一路驱动线路有效,拔销器的销轴即可实现可靠缩回与锁定。在飞行器实际应用中,存在多路舵面或翼面同时锁定与解锁的情况,若为每路舵面或翼面解锁均设计两路冗余的驱动时序,将消耗极多的系统时序驱动资源,为系统设计带来较大的负担,因此本文设计了一种综合冗余的设计方法。
假定在某特定的应用场景下,需要同时解锁四路舵面或翼面,一种综合线路冗余设计方法的基本原理见图3。采用“一驱四”的驱动方式,驱动线路1同时驱动四路拔销器的火工品1,驱动线路2同时驱动四路拔销器的火工品2,每只拔销器中任一路火工品可靠起爆即可实现拔销器销轴的缩回,因此实现了在仅使用两路驱动时序的情况下,对四只舵面或翼面的可靠解锁控制。

图3 多路舵面或翼面解锁综合冗余驱动方法的基本原理框图Fig.3 Integrated redundant driving method for unlocking multi-channel rudder or wing
为了匹配拔销器火工品起爆所需要的驱动电流,需要在每条驱动线路上设计合适的限流电阻,限流电阻阻值的选取方法为:假定拔销器内部单路火工品阻值为R1,使单路火工品可靠起爆的驱动电流为I1,驱动线路的供电电压为U1,则限流电阻R限的计算方法为:
R限=4×U1/I1-R1/4
(1)
3.3 舵面或翼面解锁时序
解锁时序是飞行器动舵面或翼面解锁设计的核心程序,若解锁时序设计不合理,极易出现解锁过程中拔销器与舵面或翼面边缘卡滞等现象,可能导致拔销器销轴不能可靠缩回,影响舵面或翼面正常解锁。舵面或翼面解锁时序包含3个关键环节,分别为驱动舵面或翼面运动的动力电池激活、发出拔销器驱动时序、舵面或翼面受控回零,具体说明如下:
1) 舵面或翼面解锁前,由于不对舵面或翼面进行控制,因此为舵面或翼面运动提供能源的动力电池处于未激活状态;舵面或翼面解锁后,飞行器需要进行舵面或翼面的闭环控制,解锁后动力电池必须激活,并持续输出动力供电;
2) 拔销器驱动时序输出用于驱动拔销器内部的火工品可靠起爆,驱动时序持续时间需要大于火工品可靠发火时间,并留有一定余量;
3) 舵面或翼面受控回零指的是在拔销器的销轴可靠缩回后,舵面或翼面在控制指令的驱动下保持在电气零位。
一种典型的舵面或翼面解锁控制时序见图4,舵面或翼面解锁时序以发出动力电池激活时序时刻作为T0,动力电池激活时序持续0.2 s,之后开始判断电池建压结果(连续多次采集动力电池电压,满足动力电池建压正常判据即认为电池建压正常),在2 s内判定电池建压正常后,发出拔销器驱动时序,持续0.1 s,大约3 ms后拔销器销轴可靠缩回并锁定,从发出拔销器驱动时序开始0.02 s后,舵面或翼面伺服驱动器中的功率模块上电,此时舵面或翼面受控回零,0.08 s后,舵面或翼面按控制指令开始闭环运动。

图4 舵面或翼面解锁时序示意图Fig.4 Unlocking sequence of rudder or wing
舵面或翼面解锁时序设计的核心思想是“先解锁,后回零”,按照该时序设计,拔销器销轴在缩回过程中仅需要克服舵面或翼面与拔销器销轴的接触摩擦力,不会受到舵面或翼面伺服额外的控制力作用;若采用“先回零,后解锁”的方式,由于伺服回零存在精度偏差,可能出现伺服回零时与拔销器销轴卡滞现象,导致伺服电机堵转,影响后续的拔销器可靠缩回。
3.4 舵面或翼面解锁状态判定
飞行器对于舵面或翼面解锁状态的判定至关重要,往往作为是否正常执行后续飞行程序的前提。舵面或翼面解锁状态可以通过采集每路拔销器的工作状态获取,但是该种方式需要拔销器内部设计额外的状态反馈线路,一方面增加了拔销器的设计难度,同时该方式仅表征拔销器的工作状态,未反映舵面或翼面最终是否可靠解锁的状态。基于此,提出了一种简易的小幅度摆动舵面或翼面,闭环比对舵面或翼面控制指令及角度反馈的方法,判定舵面或翼面是否正常解锁,具体流程如下:
1) 向每路舵面或翼面发送运动至α的指令;
2) 连续采集舵面或翼面实际角度反馈,若连续多个反馈周期判定舵机处于α±Δα,则判定舵面或翼面运动到位,否则判定解锁失败;
3) 向每路舵面或翼面发送归零指令,若连续多个反馈周期判定舵机处于0±Δα,则判定舵面或翼面解锁成功,可以执行后续飞行程序,否则判定解锁失败,转为既定的安全性设计措施。
在设计舵面或翼面摆动角度α时需要考虑舵面或翼面动作产生的控制力矩在飞行器的承受范围内,一般不超过2°;Δα的选取需要考虑舵面和翼面的控制精度,一般不超过0.5°。
4 试验
对于一种需要同时解锁四路舵面或翼面的典型应用场景,按照图2中舵面或翼面解锁时序开展地面原理性验证试验。
利用28 V供电信号驱动拔销器,限流电阻按照式(1)经计算为2.4 Ω,拔销器内部火工品实测电阻、计算发火电流如表1所示,其中计算得到的拔销器中每路火工品桥丝电阻的计算电流均在有效发火电流范围内,实际驱动持续时间为100 ms,监测结果见图5所示,驱动完成后检查4只拔销器,销轴全部可靠缩回。

表1 拔销器火工品实测值与计算电流范围

图5 拔销器解锁时序监测结果界面Fig.5 Unlocking sequence monitoring of pin puller
动力电池激活与拔销器解锁时序发出监测情况见图6所示,可以看出发出动力电池激活时序后约0.8 s,动力电池建压正常,之后正常发出了拔销器解锁时序。

图6 动力电池激活与拔销器解锁时序监测曲线Fig.6 Timing monitoring of power battery activation and pin puller unlocking
拔销器正常解锁后,控制舵面或翼面进行小角度摆动,进而判断舵面或翼面是否正常解锁,舵面或翼面实际监测情况见图7(仅展示1号舵),由图7可知四路舵面或翼面均正常受控摆动至2°,然后快速回零,由此判定四路舵面或翼面均正常解锁,系统正常执行试验程序,表明文中的解锁控制方法正确。

图7 舵面1解锁后摆动曲线Fig.7 Swing of rudder 1 after unlocking
5 结论
本文首先讨论了一种基于拔销器实现飞行器舵面或翼面锁定的应用场景,基于此提出了一种可控舵面或翼面解锁控制方法,包含基于关键时间点的舵面或翼面锁定状态查询、综合冗余拔销器驱动线路设计、可靠舵面或翼面解锁时序设计与简易舵面或翼面解锁状态判定方法,通过开展四路舵面或翼面解锁的地面原理性试验,证明了设计方法的正确性与可行性。本文提出的舵面或翼面解锁控制方法具有一定的通用性,可以用于指导开展飞行器可控舵面或翼面、折叠舵面或翼面锁定与解锁方案设计。
猜你喜欢
导航定位学报(2022年5期)2022-10-13
中国军转民·下半月(2022年5期)2022-06-30
凤凰动漫(军事大王)(2022年1期)2022-04-19
小猕猴智力画刊(2022年3期)2022-03-28
农业工程学报(2022年1期)2022-03-25
意林·作文素材(2021年23期)2021-01-22
北京航空航天大学学报(2020年3期)2021-01-14
航天标准化(2020年4期)2020-11-26
海军航空大学学报(2020年3期)2020-09-12
无线互联科技(2017年9期)2017-06-17