
采用MRAS 速度观测器的异步电机无电压传感器DTC 研究*
2015-03-27 07:53胡立坤梁冰红
传感器与微系统 2015年6期
李 瀛,胡立坤,梁冰红
(广西大学 电气工程学院,广西 南宁530004)
0 引 言
直接转矩控制(direct torque control,DTC)电机是一种动态的、高性能的变压变频调速技术,利用转矩反馈直接控制电机的电磁转矩,控制方法简单,转矩响应迅速[1,2]。
传感器在电力系统中应用极其广泛,在电机的闭环控制中,采用电压传感器和电流传感器分别采集电机的电压和电流信号,然而定子电压存在脉动,达不到采样频率时,传感器采集的电压会出现失真,严重影响了电机的调速性能。调速系统中一般用编码器采集电机的转速,但编码器会增加系统成本,检测误差降低系统可靠性和鲁棒性。针对这些问题,许多专家和学者开始研究无电压传感器和无速度传感器控制,取得了良好的控制效果[3~5],但在电机控制中应用却较少[6]。
基于以上的问题,本文提出了带模型参考自适应系统(MRAS)速度观测器的无电压传感器控制策略。通过逆变器的导通状态和直流侧电压估算三相定子电压,达到节省电压传感器的目的。基于转子磁链MRAS 设计速度观测器,能得到精确的反馈转速。最后,通过dSPACE DS1104,QUANSER8(Q8)搭建硬件在回路平台进行实验,验证了所提策略的可行性和其具有的良好性能。
1 改进型异步电机DTC
DTC 无需对电流进行解耦,根据电磁转矩和定子磁链幅值的偏差,加上定子磁链矢量所在的位置,直接选取合适的电压空间矢量,达到减少电磁转矩和定子磁链幅值的偏差,实现定子磁链和转矩的直接控制。
本文采用MRAS 速度观测器代替编码器估算电机转速,通过PWM 逆变器导通状态和直流侧电压估算三相定子电压,则改进后的异步电机DTC 系统框图如图1 所示。
2 无电压传感器控制
逆变器主电路如图2 所示[7]。
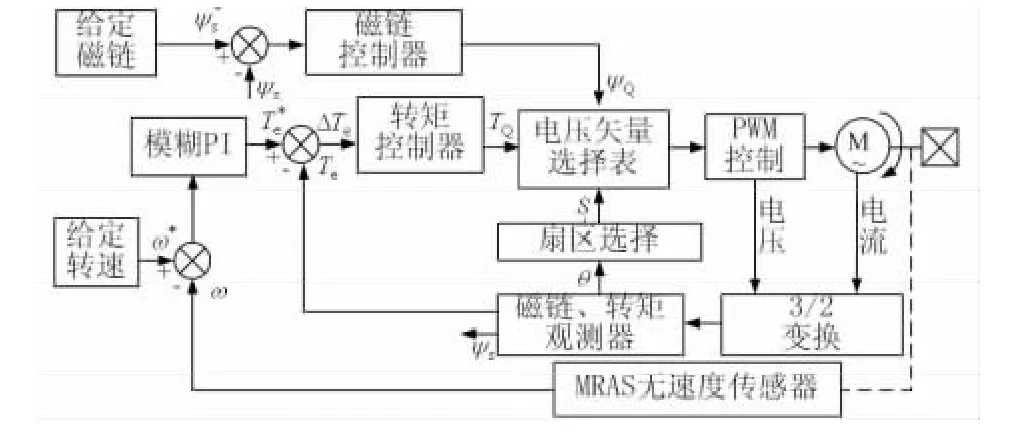
图1 改进型DTC 系统结构框图Fig 1 Structural block diagram of improved DTC system
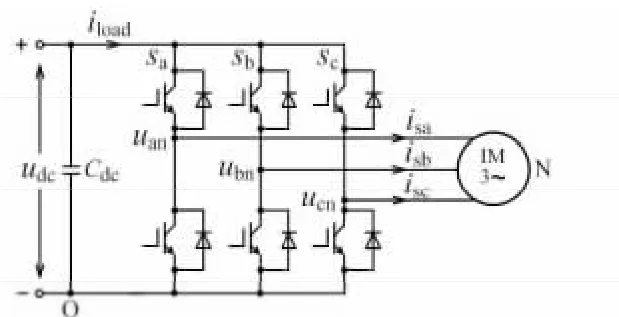
图2 逆变器结构Fig 2 Structure of converter
从中可以看出,由于电机与逆变器相连,定子电压与逆变器相电压相等。因此,电机三相定子电压和αβ 坐标系下的电压为
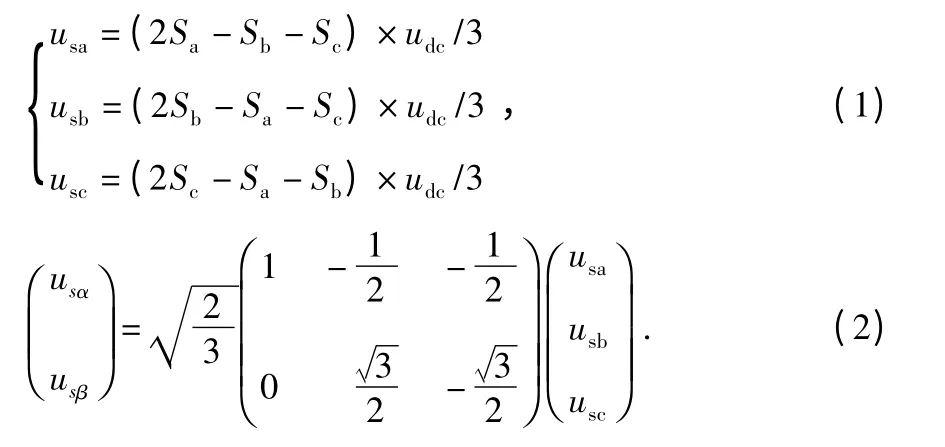
其中,udc为逆变器直流侧电压,Sa为逆变器三相桥臂开关函数,Sa,b,c=1 表示上桥臂导通,下桥臂关断;Sa,b,c=0表示下桥臂导通,上桥臂关断。由式(1)、式(2)可得到电机三相定子电压和αβ 坐标系下的电压,省去了电压传感器。
3 MRAS 无速度传感器
模型参考自适应是一种闭环估计方法[8]。转子磁链MRAS 速度观测器主要包括参考模型和可调模型,参考模型不含转速信息,而可调模型含转速信息,两模型的输出产生误差信号并反馈到自适应机制,不断地调节可调模型直到两模型输出误差为0,此时即可得到准确的估计转速。转子磁链MRAS 速度观测器结构框图如图3 所示。
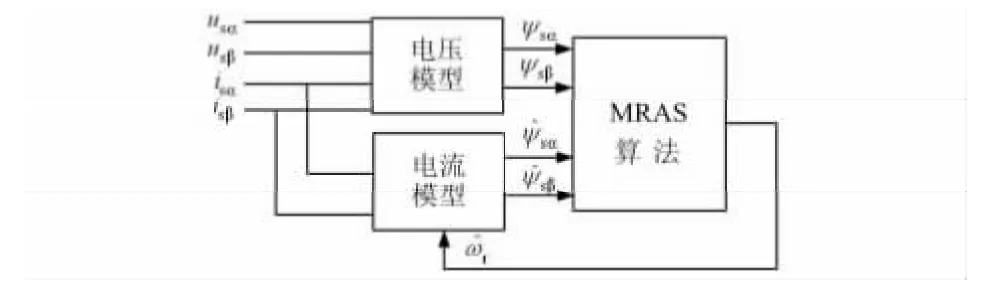
图3 转子磁链MRAS 速度观测器结构框图Fig 3 Structural block diagram of rotor flux MRAS speed observer
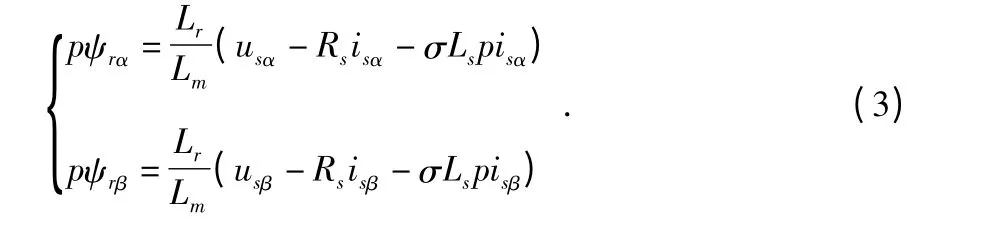
如图3,参考模型通常称为电压模型,是一个定子方程。在静止参考坐标系下,由定子电压和电流得到参考模型的转子磁链分量
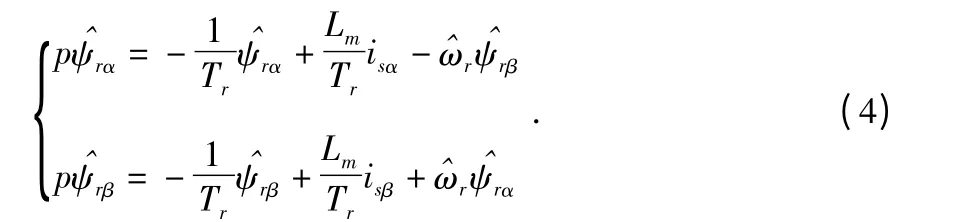
可调模型通常称为电流模型,是一个转子方程。由定子电流和转子转速得到估计的转子磁链分量

4 实验结果
dSPACE 实时仿真系统是一种基于Matlab/Simulink 的控制系统开发和半实物仿真的软硬件工作平台,分别有8 路A/D 和D/A,可直接输出三相PWM 控制脉冲。本实验采用一种4 kW 三相异步电机,采样频率50 kHz,开关频率5 kHz,死区时间5 μs。
给定转速由100 r/min 升到500 r/min,给定定子磁链为0.53 Wb,电机空载运行。MRAS 无速度传感器和编码器采集转速的对比实验结果如图4 所示。
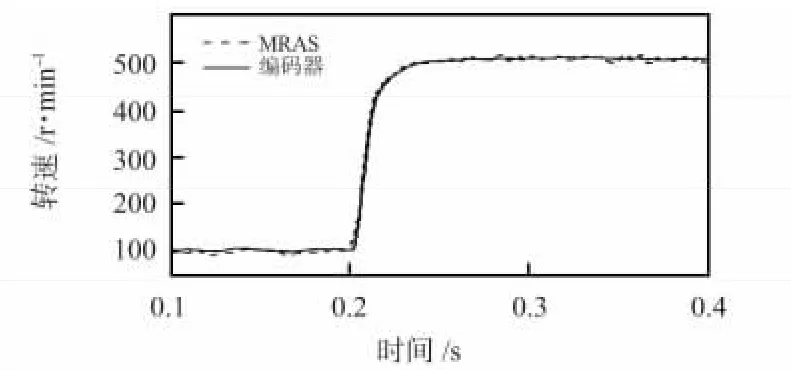
图4 MRAS 无速度传感器估计的转速Fig 4 Estimated rotating speed of MRAS speed sensorless
由式(8)和式(9)产生误差信号并通过自适应机制减小参考转子磁链和估计转子磁链间的误差信号,传统的自适应机制本质就是一个PI 控制器,由其产生的估计转速反馈到可调模型,误差信号和估计转速表示为
从图中可以看出:MRAS 速度观测器能精确地估计转速,电机转速从低速到高速的过程中估计都较为准确,和编码器采回来的转速相一致,且估计的转速较为平稳,但观测器和编码器均存在延迟,事实上,观测器和编码器一定会有时间上的延迟。升速过程中,电机的电磁转矩和定子磁链如图5 所示。
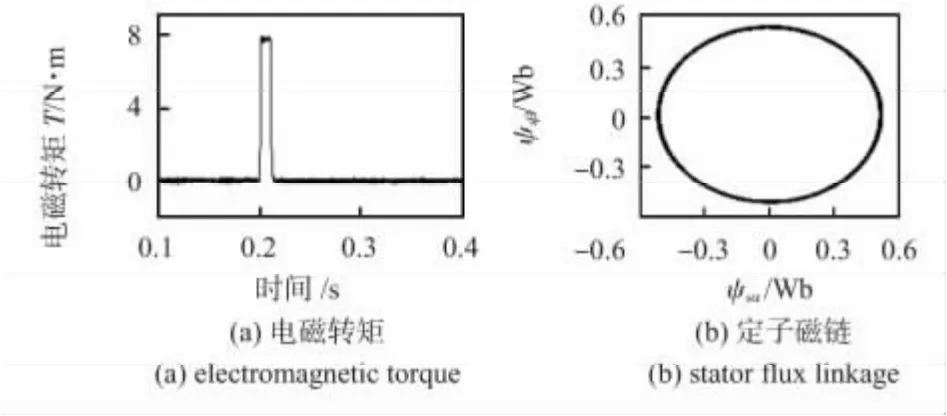
图5 调速系统的实验结果Fig 5 Experimental results of speed regulating system
从图5 可以看出:当电机速度发生变化时,转速、转矩能迅速响应,调速性能良好。图5(a)为电机的电磁转矩,可以看出:在电机给定速度变为500 r/min 时,转矩瞬间达到大约8 N·m 左右,而后快速下降,转矩脉动不大。图5(b)为定子磁链,在转速变化过程中,其值一直为给定磁链0.53 Wb,磁链波动很小,控制较好。
5 结 论
本文提出了带有MRAS 速度观测器的无电压传感器DTC 策略,基于异步电机数学模型得到转子磁链的两种模型——参考模型和可调模型,观测器能精确地估计转速,可代替编码器实现无速度传感器调节控制,提高了系统的鲁棒性和应用性。进而又根据逆变器的导通状态和直流侧电压估算三相定子电压,省略了电压传感器,节省了系统的成本。实验验证了这两种控制方法的可行性,实验过程中电机稳定运行,控制精度高,电机调速性能得到良好的改善。参考文献:
[1] Che Changjin,Qu Yongyin.Research on drive technology and control strategy of electric vehicle based on SVPWMDTC[C]∥2011 International Conference on Mechatronic Science,Electric Engineering and Computer,2011:44-49.
[2] Eleftheria S Sergaki,Stavros D Moustaizis.Efficiency optimization of a direct torque controlled induction motor used in hybrid electric vehicles[C]∥2011 Electromotion Joint Conference,2011:398-403.
[3] 赵仁德,贺益康.PWM 整流器虚拟电网磁链定向矢量控制仿真研究[J].电力系统及其自动化学报,2005,17(5):94-98.
[4] Suul J A,Luna A,Undeland T.Virtual-flux-based voltage-sensorless power control for unbalanced grid conditions[J].IEEE Transactions on Power Electronics,2012,27(9):4071-4087.
[5] Schauder C.Adaptive speed identification for vector control of induction motors without rotational transducers[J].IEEE Trans on Industry Applications,1992,28(5):1054-1061.
[6] Wang Gaolin,Xu Dianguo,Yu Yong,et al.Improved rotor flux estimation based on voltage model for sensorless field-oriented controlled induction motor drives[C]∥Power Electronics Specialists Conference,Rhodes,2008:1887-1890.
[7] 朱 绯,卢子广,胡立坤,等.异步电机无交流电压传感器自然坐标控制[J].电力电子技术,2014,48(1):91-92.
[8] Shady M Gadoue,Damian Giaouris.Performance evaluation of a sensorless induction motor drive at very low and zero speed using a MRAS speed observer[C]∥2008 IEEE Region 10 Colloquium and the Third International Conference on Industrial and Information Systems,2008:1-6.
猜你喜欢
电机与控制应用(2022年1期)2022-09-01
网络安全与数据管理(2022年1期)2022-08-29
电机与控制应用(2022年4期)2022-06-27
防爆电机(2020年4期)2020-12-14
北京航空航天大学学报(2020年10期)2020-11-14
制造技术与机床(2017年7期)2018-01-19
北京航空航天大学学报(2017年6期)2017-11-23
西安工程大学学报(2016年6期)2017-01-15
电测与仪表(2016年10期)2016-04-12
电测与仪表(2016年7期)2016-04-12
