新型PM 传感器通信协议设定与软件设计*
2015-03-27 07:53王希凡徐亚超
传感器与微系统 2015年5期
王希凡,汤 东,徐亚超,陈 烈
(1.江苏大学,江苏 镇江212013;2.金坛鸿鑫电子科技有限公司,江苏 金坛213200)
0 引 言
柴油机具有热效率高、油耗低,动力性强及可靠性高的特点,越来越多的轻型车(如轿车、轻卡)开始使用柴油机。但是柴油机颗粒物(PM)排放高的缺点一直是制约柴油机应用的主要瓶颈,柴油机排放的PM 中PM 2.5 占80%,对人体健康和环境都造成很大的危害。随着排放法规对车辆PM 排放的要求越来越高,能够实时地监测废气中PM 的含量变得越来越重要。
CAN 总线目前在汽车行业已经得到了广泛应用[1]。本文主要通过CAN 总线技术,将PM 传感器设计成为发动机控制网络中的一个智能节点,并依据SAE J1939 协议为PM传感器制定通信协议,实现实时地监测柴油机废气中PM 的含量,为柴油PM 过滤器(DPF)的故障实时监测和柴油车PM 的排放控制提供新的途径[2,3],以满足应用要求。
1 颗粒物传感器的原理
漏电流式PM 传感器的机械部分主要包括电极、引流板、金属外壳和绝缘陶瓷等。在安装的时候,PM 传感器的末端要安装在排气管的中心处,因为排气管的中心处气流速度最高,压强最小,利用文丘里管原理作用使得废气沿如图1 中的箭头流经传感器内部。在金属外壳和电极之间加载1 kV 的电压,废气流经电极时,获得电荷,在电场的作用下向接地的引流板方向运动,因此,在电极和外壳之间形成微弱的电流。测量得到回路中的电流与废气中PM 的浓度存在一定的关系,利用这种关系,可以将测量得到的电流信号转换成柴油机尾气中PM浓度的信号,从而实现尾气中PM 浓度的测量。

图1 传感器结构示意图Fig 1 Structure diagram of sensor
2 PM 传感器系统方案设计
整个系统采用模块化的设计理念,主要分为PM 传感器机械部分和其控制系统。在实际应用中,需要在PM 传感器的金属外壳和高压电极之间加1 kV 的高压。PM 传感器的控制系统主要由电源模块、信号放大模块、测温、加热、通讯和微处理器模块等构成,控制系统示意图如图2 所示。
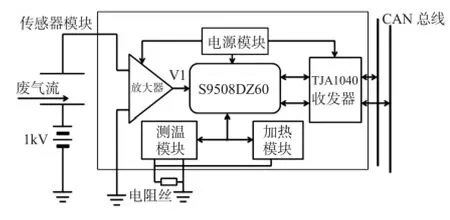
图2 传感器系统结构示意图Fig 2 Structure diagram of sensor system
3 通信协议设定
J1939 是由美国汽车工程协会为车辆定义的工业标准。协议对报文的结构、传输的类型等作了明确的规定,同时也精确定义了报文的内容,用户根据应用领域选择不同的应用层协议[4]。J1939 协议将CAN 标识符划分为如下几个部分:优先级(P)、数据页(PGN)、协议数据单元(PDU)格式、PDU 特定域(PS)和源地址(SA)。
3.1 应用层协议的制定
PM 传感器的应用重点在两个方面:一方面是实时监测DPF 工作状态,为DPF 故障监测和再生时机选择提供新的途径;另一方面用于车载诊断(OBD)系统,实时监测发动机PM 排放的情况。
3.1.1 DPF 故障检测系统
DPF 故障监测系统主要包括:PM 过滤器前端PM 传感器(FPMS),PM 过滤器后端PM 传感器(APMS),PM 过滤器控制单元(DCU)和指示系统(IS)。
FPMS 和APMS 将采集的PM 浓度的信息和传感器工作温度信息发送给DCU,接收来自DCU 的指令对传感器的工作状态进行控制;DCU 根据发动机工作的状态和PM传感器发送的信息对PM 传感器工作状态和指示系统进行控制。
3.1.2 再生系统应用层
定义PM 浓度和传感器温度报文,该报文发生在系统工作过程中,通信双方为DCU/APMS。触发方式为周期触发,发起者为APMS。APMS 向DCU 发送PM 浓度信息和PM 传感器工作温度信息。
3.1.3 协议数据单元设计
根据PM 传感器测量的精度和范围计算出PM 浓度信息需要占用3 个字节,传感器工作温度信息占用2 个字节。数据域长度为8 个字节。
确定报文的优先级、数据页(DP)、PDU 格式(PF)、特定PDU(PS)和源地址(SA)。优先级设定为1。PF 选定为255。根据SAE 规定,DP 取0。PS 取4。取APMS 的地址为128。
根据每位的值求取参数群编号(PGN)和标识符(ID)。由上面所定义的参数可以算出参数群编号(PGN)的值如表1所示。
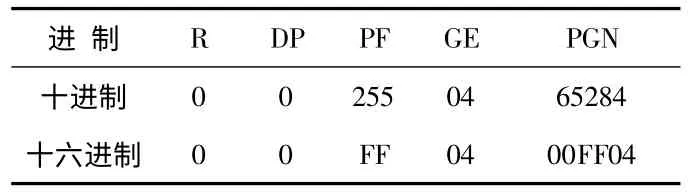
表1 PGN 的构成与计算Tab 1 Constitution of PGN and calculation
SRR 为替代远程请求,用户在使用过程中为传输缓冲器置位为1。IDE 标志显示扩展或标准标识符是否用于该缓冲器,IDE 位在此为1 表示扩展模式。RTR 位表示反映CAN 帧中远程发送请求的状态,在此,RTR 位为0 表示数据帧。可得出32 位仲裁场(表2)。最后将标识符与数据域进行结合,组成整个数据帧,如表3 所示。
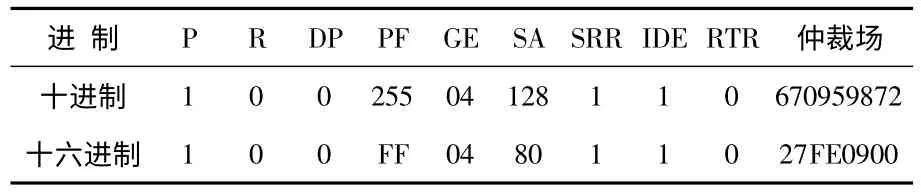
表2 仲裁场的构成与计算Tab 2 Constitution of arbitration field and calculation

表3 数据帧Tab 3 Data frame
系统中仲裁场的32 位所对应的是MC9S08DZ60 芯片中的4 个标识符寄存器(IDR0 ~IDR3)。在软件中PM 传感器所发送的PM 浓度数据帧所对应的标识符寄存器的赋值如表4 所示。

表4 标识符寄存器每一位的值Tab 4 Value of each bit of identifier registers
4 系统软件设计
控制系统软件采用模块化的理念,利用C 语言进行编写,并借助CW for Microcontrollers V6.3 集成开发环境进行调试和烧录。
PM 传感器控制系统软件的设计主要包括初始化模块、CAN 接收和发送模块、信号采集模块、CAN 总线通信中断处理模块和主程序模块。
4.1 初始化模块
控制系统初始化程序模块包括:微处理器初始化、CAN模块初始化、A/D 初始化、RTI 初始化。
4.1.1 波特率参数设置
对于MC9S08DZ60 芯片,波特率的计算公式如下

其中,fbit为总线波特率;Tbit为标称位时间;fCANCLK为CAN 主时钟频率;Pr escalar value 为预分频值;timesegment1为相位缓冲段1;timesegment2为相位缓冲段2[5]。
根据SAE J1939 协议,采用的总线波特率为250 kbps。通过计算得出CAN 总线波特率fCANCLK为4 MHz 时,将寄存器CANBTR0 设置为0x40,将寄存器CANBTR1 设置为0x23。
4.1.2 标识符接收滤波器设置
在本系统CAN 初始化的过程中,CAN 控制寄存0(CANCTL0)设置为 0xCC,CAN 控制器寄存器1(CANCTL1)设置为0x67。2 个控制器寄存器设置的主要功能是使能CAN 模块、选用振荡器时钟源、环回自测禁止、正常运行。
4.1.3 A/D 转换初始化
在本系统软件设置中,配置寄存器(ADCCFG)设置为0x04,选择高速配置、将ADCK 设置为输入时钟除以1、短采样时间、12 位转换精度、选择总线时钟为输入时钟源;状态和控制寄存器2(ADCSC2)设置为0x00,选择软件触发、比价功能禁止;更新状态和控制寄存器1(ADCSC1)设置为0x01,转换完成中断功能禁止、进行一次转换,根据需要选择输入通道。
4.2 CAN 总线通信模块
系统中,PM 传感器控制系统向总线上发送数据采用中断的方式来实现;而接收总线上的报文则通过查询的方式来实现。
PM 传感器控制系统向总线上发送报文采用周期发送的方式,进入定时器中断服务程序后,开始调CAN 发送函数向总线发送数据,发送完成后退出中断服务程序。流程图如图3(a)所示。
PM 传感器控制系统需要接收的信息主要是来自发动机控制单元对PM 传感器工作状态控制的信息,当查询到总线上有来自其他节点的报文时,便对报文的标识符进行比较,若是本系统需要的信息便接收;反之,则不接收。流程图如图3(b)所示。

图3 CAN 点线发送与接收程序流程图Fig 3 Flow chart of CAN bus sending and receiving programs
4.3 信号处理模块
信号处理模块主要包括温度和电流信号的采集和数字滤波。由于PM 传感器输出的电流信号非常微弱,即使很小的干扰也会对测量结果带来很大的影响,因此,采用滤波的方式滤除干扰噪声。本系统数字滤波采用了一种一阶滞后滤波算法[6,7],取a=0 ~1:本次滤波结果=(1-a)×本次的采样值+a×上次滤波的结果,在实验中a 取0.9。流程图如图4 所示。

图4 信号处理流程图Fig 4 Flow chart of signal processing
4.4 通信中断服务程序
通信中断服务程序流程图如图5 所示。中断程序是通过设置核心芯片中的实时计数器(RTC)模块来实现的。在软件设置中,寄存器RTCSC 设置为0x9C,选用1 kHz 振荡器,进行10 分频,并中断使能;寄存器RTCMOD 设置为0x64 设置中断间隔为1 s。

图5 通信中断服务程序流程图Fig 5 Flow chart of communication interrupt service program
4.5 开发板软件设计
开发板具有完整的CAN 通信硬件,本课题利用双绞线连接开发板和控制系统电路板的CAN_L 和CAN_H 引脚,并用开发板上的两个按键通过CAN 总线对传感器的工作状态进行控制。用开发板上的4 位数码管显示通过CAN总线发送过来的温度和颗粒物浓度信号,进而验证控制电路的性能。开发板的主程序流程图和控制系统主程序流程图如图6(a),(b)。
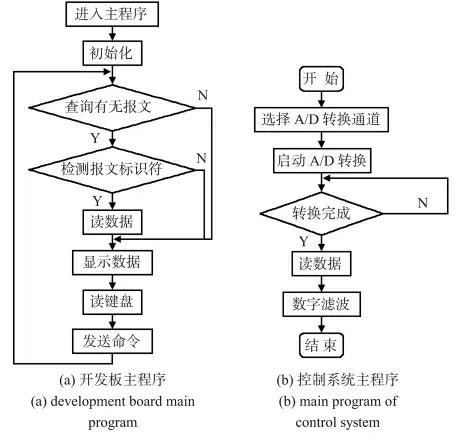
图6 开发板与控制系统主程序流程图Fig Flow chart of main programs of development board and control system
5 实 验
5.1 实验装置
实验装置如图7 所示,主要包括两大部分:传感器电路板和开发板。
5.2 实验结果
在实验中通过调节电阻器阻值的大小来获得不同的电流值,电流大小由6000—02—100 μA 型精密电流表A 读取,在0 ~120 nA 之间变化,并通过放大器放大和转换成为相应的电压信号,由单片机采集处理后通过CAN 总线发送到开发板上,并由数码管把结果显示出来,如图8 所示。

图7 实验装置Fig 7 Experimental device

图8 电流放大结果Fig 8 Current amplification results
实验表明:硬件电路和软件的信号处理模块能够很好地完成微电流信号的放大和转换功能,并且具有很好的线性度,通过修正处理可以实现三块电路板的转换放大效果保持一致。
6 结 论
以SAE J1939 协议为基础为颗粒物传感器制定的应用层协议,在实际硬件平台中可以实现,且运行稳定,为将来PM 传感器在实际应用中通信协议的制定提供参考。
[1] 农 毅.基于CAN 总线的网络化汽车传感器的研究与设计[J].传感器与微系统,2007,26(8):90.
[2] 艾华兴.铁基燃油添加剂在柴油机颗粒物过滤器再生中的应用研究[D].天津:军事交通学院,2010.
[3] 罗 涛.柴油车微粒捕集器喷油助燃催化再生控制策略研究[D].天津:军事交通学院,2009.
[4] 高 松,高 燕,王吉华.SAEJ1939 协议在车辆上的应用[J].拖拉机与农用运输车,2006,33(6):1-2.
[5] 李 芳,张俊智,王丽芳,等.电动汽车动力总成系统控制器局域网(CAN)总线通讯协议[J].机械工程学报,2008,44(5):102-107.
[6] 向红军,雷 彬.基于单片机系统的数字滤波方法的研究[J].电测与仪表,2005,42(9):53-55.
[7] 杨 剑,刘光斌.单片机系统中应用的技术数字滤波方式[J].微计算机应用,2006,27(1):115-116.
猜你喜欢
计算机应用(2022年8期)2022-08-24
舰船电子工程(2020年5期)2020-07-09
计算机系统应用(2020年8期)2020-03-22
电子制作(2017年22期)2017-02-02
河南科技(2016年8期)2016-09-03
河南科技(2016年6期)2016-08-13
物联网技术(2015年11期)2015-11-26
图书馆建设(2015年11期)2015-08-24
图书馆(2014年3期)2014-12-25
浙江共产党员(2014年12期)2014-07-10