基于多压力传感器负压波的管道检测法*
2015-03-27 07:53王洪诚穆帅欢
传感器与微系统 2015年5期
王 正,王洪诚,傅 磊,穆帅欢,王 蕾
(1.西南石油大学 机电工程学院,四川 成都610500;2.西南石油大学 电气信息学院,四川 成都610500)
0 引 言
近年来,一些研究机构对负压波检漏法进行了实用化研究,虽然在多条管线的泄漏检测中成功地应用了负压波检漏法,但是其中不乏多种问题出现[1,2]。国内外负压波检漏法的研究主要集中在负压波信号识别上,如,利用相关分析、小波分析、小波变换、神经网络、卡尔曼滤波和模式识别等来提高定位精度和泄漏预报精度。
本文提出了一种基于多压力传感器负压波的管道检漏法[3],通过对流量、压力等参数的实时监控,结合泵站前后的压力传感器来合力判断是否为真实泄漏引起压力变化和泄漏点初步的定位,并及时关闭相关阀门,同时发出报警信号,通知工作人员快速有效地做出反应,将损失降到最小。
1 负压波法
1.1 负压波定义
目前,国际上应用较多的管线泄漏检测和漏点定位方法是负压波法。当某处管道上突然发生泄漏时,由于管道内的流体压力一般远大于管道外的大气压力,在内外压力差的作用下管道内的流体从泄漏点迅速流失,泄漏点两边相邻区域的压力高于泄漏点处的压力,这种压力差导致泄漏点上下游的流体向泄漏点处区域进行补充,从而又引起两侧区域的流体密度减小和压力降低,这种从泄漏点处沿管道依次向上、下游方向扩散的现象,叫做负压波[4,5],其传播的速度在不同规格的管线中并不相同。
1.2 单压力传感器负压波法检测与定位
负压波法是根据传感器捕捉到特定的瞬态压力降的波形进行泄漏判断,泄漏位置是根据负压波传播到上下游的时间差来估算[6]。
在输油管道泄漏检测系统中,管道的1,2 站两端装有2 只压力传感器,接收系统中传来的压力值。定位原理如图1 所示,设管道长为L,泄漏点为RX(RX点是管道上面的任意一点),负压波传播速度为v,管道内流体流速为v0,一般v 比v0大3 个数量级以上。

图1 泄漏点的定位原理图Fig 1 Principle diagram of leak point positioning
在上图中假设泄漏点RX处产生的压力波传到1 站的时间为T1,传到2 站的时间为T2,则有

当液体管道出现泄漏时,其两个端点的压力会剧烈下降,根据两个端点压力传感器所检测到剧降的时间差

即可估算泄漏位置

其中,L 为管道长度,m;X 为泄漏点到首端距离,m;v 为管道中负压波的传播速度,m/s;vo为流体速度,m/s;ΔT 为1,2 站端压力波到达时间差,s。


若测出ΔT,即可由式(4)求得泄漏点RX距离1,2 站之间的距离。
1.3 单压力传感器负压波法检测的缺点
当管道中某处发生泄漏时,管道内会产生负压波,单压力传感器负压波检测法的关键不仅在于能否正确检测到该负压波,而且要看能否正确辨别该负压波是否为泄漏所引起。在管道输油系统中,可能产生负压波的除泄漏引起外,还可由工况调整引起管道内压力变化而产生负压波,如,调泵、起泵、停泵等,系统误报常常是由这些工况调整的干扰引起的,造成系统虚警率提高,所以,只有解决好虚警问题才能体现系统的准确性[7~9]。
2 多压力传感器基于负压波的泄漏检测
2.1 双压力传感器基于负压波法泄漏检测
双压力传感器法原理图如图2 所示。在泵1 站一端安装2 只压力传感器A1 和A2,分别为泵1 近端和远端;在泵2 站的一端也安装2 只压力传感器B1 和B2,分别为泵2 远端和近端。当泵1 站有工况调整时,引起的压力波按时间的先后顺序依次通过泵1 近端、泵1 远端、泵2 远端、泵2 近端。当泵2 站一侧有工况调整时,引起的压力波按时间的先后顺序依次通过泵2 近端、泵2 远端、泵1 远端、泵1 近端。当输油管线中间发生泄漏时,引起的压力波在泵1 站的一侧是泵1 远端先接收到,泵1 近端后接收到,在泵2 站的一侧也是泵2 远端先接收到,泵2 近端后接收到,因此,根据1,2 站2 只压力传感器接收到的压力波的先后顺序,就能可靠地区分压力波的起因是因工况调整还是管道泄漏。
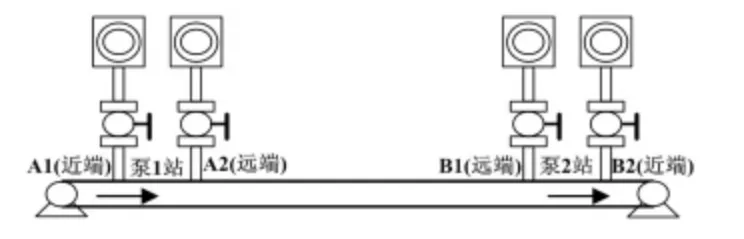
图2 双压力传感器法原理图Fig 2 Principle diagram of double pressure sensor method
双压力传感器负压波法泄漏检测的判断模式见表1。

表1 判定模式Tab 1 Decision model
此方法也存在一定缺陷,譬如:当泄漏发生在油库两个检测点A1,A2 之间并且距离A1 近端(B2 近端)非常接近的时候,就会认为泄漏是因1 站(2 站)工况调整引起,造成系统漏报率提高。
2.2 多压力传感器基于负压波法泄漏检测原理
多压力传感器法原理图如图3 所示。多压力传感器法原理是基于双压力传感器法基础之上,多压力传感器法连接了泵站前与泵站后的4 只传感器合力进行判断。在泵1站前端安装2 只压力传感器C1 和C2,分别为泵1 前远端与泵1 前近端;在泵1 站后端安装2 只压力传感器A1 和A2,分别为泵1 后近端与泵1 后远端;在泵2 站前端安装2 只压力传感器B1 和B2,分别为泵2 前远端与泵2 前近端;在泵2 站后端安装2 只压力传感器D1 和D2,分别为泵2 后近端与泵2 后远端。当泵1 站和泵2 站有工况调整和管道中间发生泄漏时,判断方法类似双压力传感器法。当泄漏发生在站前或者站后两个检测点之间时候,譬如:发生在A1 与A2 之间并且距离A1 近时,压力波按照时间先后顺序依次到达泵1 后近端、泵1 后远端、泵1 前近端、泵1 前远端、泵2 前远端、泵2 前近端、泵2 后近端、泵2 后远端。但当泵1 站有工况调整时,压力波按照时间先后顺序依次到达泵1 前端C1,C2 以及后端A1,A2 几乎同时到达、泵2 前远端、泵2 前近端、泵2 后近端、泵2 后远端。这样就可以正确作出判断,双压力传感器法中的漏报情况得以解决。

图3 多压力传感器法原理图Fig 3 Principle diagram of multi-pressure sensor method
根据压力波到达先后顺序进行判断,多压力传感器负压波法泄漏检测的判断模式见表2。

表2 多压力传感器法判定模式Tab 2 Decision model of multi-pressure sensor method
根据上表的分析判断,此方法可以避免双压力传感器中出现的漏报情况的发生,并且可以根据负压波到达先后顺序进一步确定泄漏点的位置,因此,不仅可以降低虚警率为系统正常运行减少故障,还可以为泄漏点定位提供有效数据。
3 仿真验证
采用上述基于多压力传感器负压波的检测方法对某输油管道进行仿真设计,管道数据如下:管道全长为34 km,管道直径为300 mm,1 站与2 站之间距离为32 km,A1 与增压泵,A1 与A2,C2 与C1,C2 与增压泵,B1 与增压泵,B1 与B2,D2 与D1,D2 与增压泵等之间的距离都为0.5 km,1 站流体压力4.8 MPa,2 站流体压力3.6 MPa,1 站流体温度为60 ℃,2 站流体温度为50 ℃,负压波传播速度为1 100 m/s,流体的流速为3 m/s。管道在如下几种条件下引起压力变化,s 表示泵站离传感器距离,T1表示忽略流体流速的情况下负压波到达各个传感器的时间,T2表示正常情况下负压波到达各个传感器的时间。
1)测试条件:在仿真系统中对1 站进行模拟工况调整,引起压力变化;时间测试数据如表3 所示。

表3 时间测试数据Tab 3 Time test data
通过上表数据可以得出:当1 站工况调整时,压力波按照时间先后顺序依次到达C2 与A1,C1 与A2,B1,B2,D1,D2,不管是否考虑管道流体流速的影响都可以得到相同结果,并且还可以看出压力波几乎同时到达1 站前端和后端。
2)测试条件:在仿真系统中对2 站进行模拟工况调整,引起压力变化;时间测试数据如表4 所示。

表4 时间测试数据Tab 4 Time test data
通过上表数据可以得出:当1 站工况调整时,压力波按照时间先后顺序依次到达D1 与B2,D2 与B1,A2,A1,C2,C1,不管是否考虑管道流体流速的影响都可以得到相同结果,并且还可以看出压力波几乎同时到达2 站前端和后端。
3)测试条件:在仿真系统中对A2 与B1 之间且距离A2点10 km 处进行模拟管道泄漏,引起压力变化;时间测试数据如表5 所示。
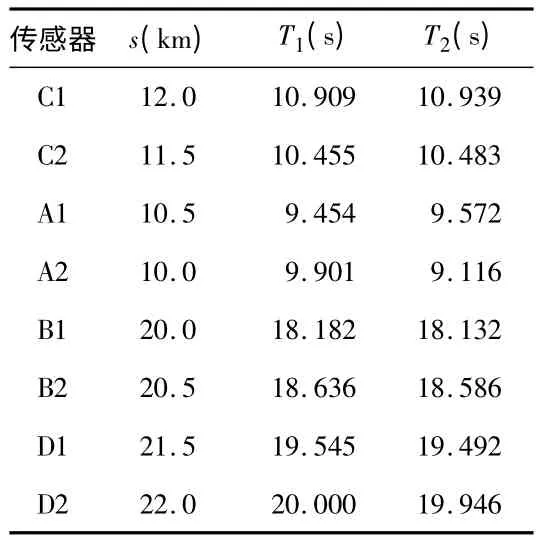
表5 时间测试数据Tab 5 Time test data
通过上表数据可以得出:距A2 点10 km 处发生泄漏时,压力波按照时间先后顺序依次到达A2,A1,C2,C1,B1,B2,D1,D2,不管是否考虑管道流体流速影响都可以得到相同结果,并且还可以看出压力波是先到达1 站后端,然后再到达1 站前端。
4)测试条件:在仿真系统中对A1 与A2 之间且距离A1点0.2 km 处进行模拟管道泄漏,引起压力变化,当距离A2近时与(3)相同;时间测试数据如表6 所示。

表6 时间测试数据Tab 6 Time test data
通过上表数据可得出:距A1 点0.2 km 处发生泄漏时,压力波按时间先后顺序依次到达A1,A2,C2,C1,B1,B2,D1,D2,不管是否考虑管道流体流速的影响都可以得到相同结果,并且还可以看出压力波是先到达1 站后端,然后再到达1 站前端。
5)测试条件:在仿真系统中对B1 与B2 之间且距离B2点0.2 km 处进行模拟管道泄漏,引起压力变化,当距离B2近时与(3)相同;时间测试数据如表7 所示。
通过上表数据可得出:距B2 点0.2 km 处发生泄漏时,压力波按时间先后顺序依次到达B2,B1,D1,D2,A2,A1,C2,C1,不管是否考虑管道流体流速的影响都可以得到相同结果,并且还可以看出压力波是先到达2 站前端,然后再到达2 站后端。
4 结束语
本文提出了一种基于多压力传感器负压波的管道泄漏检测方法,通过仿真分析证明了该泄漏检测方法的正确性,不仅能够有效解决系统漏报警问题,并且还能为系统泄漏点的精确定位提供有效帮助,明显优于其他两种检测方法。
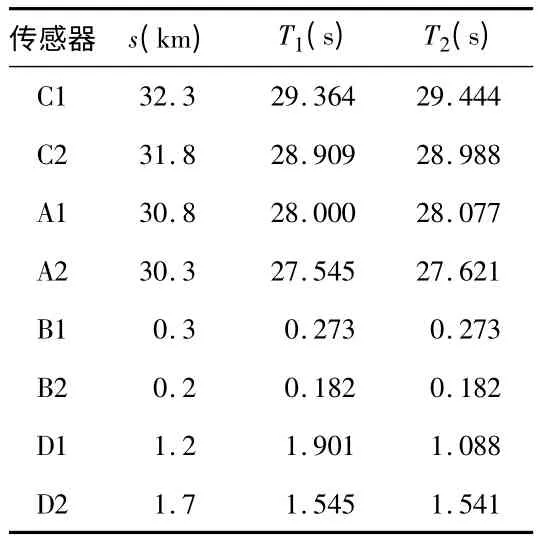
表7 时间测试数据Tab 7 Time test data
[1] 王长健,叶伟文,肖超波,等.负压波在管道泄漏检测与定位中的应用[J].管道技术与设备,2009(6):27-28.
[2] 邓鸿英,杨振坤.基于负压波的管道泄漏检测与定位技术研究[J].计算机测量与控制,2003,11(7):481-482.
[3] Hua T C,Yan J,Huang J,et al.Negative pressure wave based pipeline leak detection:Challenges and algorithms[C]∥2012 IEEE International Conference on Service Operations and Logistics,and Informatics(SOLI),IEEE,2012:372-376.
[4] 孙 良,王建林,赵利强.负压波法在液体管道上的可检测泄漏率分析[J].石油学报,2010,31(4):654-658.
[5] 李银凯,石 刚,李 剑.输油管道泄漏检测与定位系统升级改造[J].油气田地面工程,2011,30(11):53-54.
[6] 胡世杰,尹维臣,李绍文,等.相关函数及其在管道泄漏检测中的应用[J].油气储运,2011,30(3):200-202.
[7] 冉小俊,张建昌.基于负压波的原油管道泄漏监测系统的失效及预防[J].石油化工应用,2012,31(7):99-101.
[8] 张 智.负压波检漏技术在输气管线中的应用[J].石油化工自动化,2012,48(2):69-71.
[9] 张德发,韩 京.管道泄漏检测优化算法的研究与仿真[J].计算机仿真,2012,29(4):401-404.
猜你喜欢
建材发展导向(2022年10期)2022-07-28
昆明医科大学学报(2022年1期)2022-02-28
科学与财富(2018年30期)2018-12-28
临床医药文献杂志(电子版)(2017年11期)2017-05-17
中国医学装备(2016年6期)2016-12-01
计算机应用(2016年9期)2016-11-01
腹腔镜外科杂志(2016年10期)2016-06-01
体育科技(2016年2期)2016-02-28
中国当代医药(2015年8期)2015-03-01
中国中医药现代远程教育(2014年16期)2014-03-01