基于WSNs 的定位策略在滑坡监测中的应用*
2015-03-27 07:53胡春安张起辉
传感器与微系统 2015年5期
胡春安,张起辉
(江西理工大学 信息工程学院,江西 赣州341000)
0 引 言
由于基于静态的监测很难及时捕捉山体滑坡的动态信息[1],而使及时准确地预测滑坡发生仍有相当的难度。滑坡发生的条件是坡体不停的运动,当坡体位移累积到一定程度,坡体的重力大于对抗阻力滑坡就会发生,因此,滑坡位移的有效监测可以实现滑坡的预测[2]。而作为无线传感器网络(WSNs)关键技术之一的节点定位技术,因其能够获取其它监测信息的位置信息而被广泛应用[3,4]。将该技术应用于滑坡监测,通过传感器节点位置的变化获取坡体的运动状态,并通过WSNs 实时地将坡体位移信息传输给站台分析,以取代传统意义的仪表监测。
目前,估计传感器节点的精确位置仍有很大难度,有必要对当前的定位算法进行改进。文献[5]提出在原有质心算法的基础上,通过数学法选取合理的角度对RSSI 值进行筛选,从而使求得的加权因子能合理反映真实环境。文献[6]Anil Kumar 提出一个三维节点定位问题,采用生物地理优化(BBO)算法降低误差。综上所述,目前对这类定位算法的改进是在原始数据采集与滤波上,以及对节点全局位置的估计算法进行改进,而没有充分利用锚节点数据资源。
本文考虑到滑坡监测的特殊环境,充分利用锚节点的数据资源,通过计算锚节点之间的测距误差获取产生误差的环境因子,同时引入锚节点的误差系数对RSSI 测距进行修正,并将环境因子与修正距离作为权值选取需要考虑的因素,从而使权值的选取更加合理,以提高坡体传感器节点定位精度。
1 基于WSNs 的滑坡监测
图1 是基于WSNs 的滑坡监测的结构框图,图中的传感器节点分为锚节点和未知节点两类,锚节点事先知道自身的位置,并且对未知节点定位起辅助作用。锚节点和未知节点分布在坡体上,但锚节点分布在坡体周围比较稳定的地方以便锚节点在滑坡发生时不被破坏。汇聚节点既有锚节点的功能也负责与监控中心通信。未知节点的坐标就是通过图中的网络传输到监控中心。

图1 基于WSNs 的滑坡监测框图Fig 1 Landslide monitoring block diagram based on WSNs
在实际监测过程中,一旦存在或者近似确定坡体的运动位置,网络中的节点就转发传感器节点的位置信息到监控中心,监控中心将这些监测数据作为有限元素模型(FEM)的输入变量,根据该模型的输出结果预测滑坡灾害是否会发生[1]。
2 传统定位算法分析
2.1 基于RSSI 的测距算法
基于RSSI 的测距技术是利用信号能量损耗测量距离的一种技术[7],但信号衰减易受外部环境等因素的影响,导致测距不精确。文献[8]中介绍的对数正态阴影模型(LNSM),能更真实地描述RSSI 值和距离之间的关系,是一个应用比较广泛的信号传播模型,可表示为

式(1)是理想情况的下的传输模型,考虑到滑坡所处的环境情况,LNSM 可进一步描述为

式中 PL(d)表示距离d0时的无线电波信号损耗值,d0通常取1,N 为信号衰减因子,与特定的环境有关。d 为两个通信节点之间的距离,δ 满足均值为零,标准差取值在[4,10]范围的高斯分布,为了方便计算可以不考虑其影响。
在WSNs 中传感器节点接收到的RSSI 满足以下关系

式中 RSSI 可通过实验测量获得,Pt为发射功率,Gr为天线增益,dB。利用以上各公式,即可计算出通信距离d[8]。
2.2 加权质心定位算法分析
利用式(1)、式(3)求出距离,以这个距离构成的函数作为权值[9],对能够与未知节点进行信息交互的锚节点进行加权,然后通过式(4)进行定位[10]

权值的选取方法不唯一,一般是一个关于距离的函数[11],选取方法如下式所示

式中 r 为节点之间的通信半径,di为节点之间的测量距离。事实证明,引入权值后算法的定位性能得到明显改善。
3 改进算法描述
在实际应用中,滑坡所处的外部环境条件不断变化,采用上文固定的算法权值因不能充分体现节点所处环境的真实情况[12]而降低节点的定位精度。改进的算法充分利用锚节点的数据信息,依次将其中之一的锚节点当作未知节点,利用剩余锚节点的信息依次求得对应锚节点的平均测量误差,然后对平均测量误差进行某种计算分别得出该节点对应的环境因子(反映该节点所处的外部环境条件)和误差系数,在定位过程中利用误差系数修正未知节点到锚节点的距离,最后将环境因子与修正距离的商作为权值,结合加权质心算法(WCLA)完成节点定位。
具体过程如下:对于已初始化的WSNs,已知锚节点坐标为(xi,yi),i=1,2,…n,则锚节点i 和j 之间的真实距离drij为

坡体锚节点间的测量距离可由式(1)、式(3)求得为dcij。
假设网络中锚节点的数量为M,算法中为了进一步减小距离的测量误差,取各锚节点测量误差的均值,则锚节点i 的平均测量误差εi为

由上式计算可知,εi的大小不相同,较小的εi表明该锚节点对未知节点测距的影响处于主导地位,外界影响力居于次要地位,所以,要想更好地反映锚节点对未知节点的影响情况,就需要将较大的环境因子赋给εi较小的锚节点。
假设WSNs 中滑坡节点能够与除自身外n 个节点进行数据交换,则将第i 个锚节点的环境因子θi定义为其自身的平均测量误差的倒数与所有锚节点平均测量误差倒数之和取商,即

通过式(8)的计算,锚节点被赋予反映自身情况的环境因子。
前文已经提到锚节点i 的平均测量误差为εi,则锚节点i 的误差系数为

假设锚节点i 的数据交换范围内有一未知节点m,节点m 与i 的测量距离为dcim,则其修正距离为

上述过程结束后,引入新的权值计算方法,即环境因子与修正距离的商为

在实际滑坡应用中,每次定位之前先通过式(8)、式(10)求得反映外部环境的θi,dxim,并将其作为权值选取的依据,根据式(4)求取未知节点坐标(x'i,y'i)。
4 仿真分析
实验电脑的硬件环境为Intel Core i5 3.1 GH,内存4 G,显存1 GMB。操作系统是32 位WINDOWS 7,仿真软件为Matlab 2012b。在仿真分析时,将120 个节点随机分布在100 m×100 m 仿真区域内,其中,20 个为未知节点,节点通信半径相同。选取定位节点的估计位置与真实位置的差值作为算法性能的评估参数,并作归一化处理

其中,n 为未知节点个数,R 为节点通信半径,(xi,yi)是未知节点的实际坐标是计算得到的坐标。仿真结果如图2 ~图4.

图2 三种算法对应的定位节点误差曲线Fig 2 Error curve of localization node of three algorithms
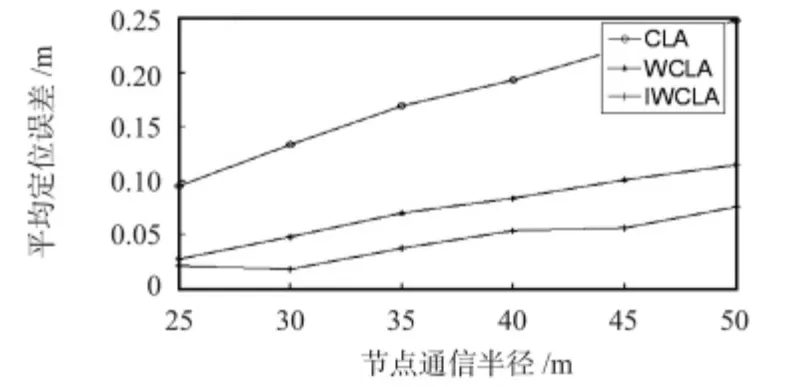
图3 三种算法对应平均误差与半径的关系Fig 3 Relationship between average error and radius of three algorithms

图4 三种算法对应平均误差与锚节点的关系Fig 4 Relationship between average error and anchor nodes of three algorithms
从图2 可以看出各未知节点的定位误差不相同,这与它们所处周边具体环境有关,但从图中得知,WCLA 明显优于传统的质心算法,改进后的WCLA(IWCLA)又优于WCLA。
图3 显示:IWCLA 的平均定位误差更小,但是算法平均定位误差并不是随着半径的增大而减小,因此,应选择合适的半径,图中误差在r=30 m 时最小,在实际滑坡应用中可以考虑将节点的通信半径设在30 m 左右,以提高算法准确度。
从图4 可以看出:IWCLA 算法的关系曲线始终在前两种算法的下方,并且平均定位精度分别提高了56.3%,26.2%,改进后算法优越性得到证明。
5 结 论
本文提出将WSNs 应用于滑坡预测,以位移监测作为切入点,将坡体位移监测的研究转化为节点定位问题的研究,在充分考虑滑坡外部环境的条件下,提出一种改进的基于RSSI 的加权质心算法,该算法首先以锚节点为研究目标,引入锚节点的误差系数对RSSI 测距进行修正,同时通过计算锚节点的平均测量误差求得对应锚节点的环境因子,将环境因子与修正距离同时作为权值选取的依据,以提高算法的定位准确度。实验表明:改进后的算法更多地考虑到外部环境的影响,减小了坡体节点定位误差,能较好适应于滑坡监测预测。
[1] Andreas Terzis,Annalingam Anandarajah,Kevin Moore,et al.Slip surface localization in wireless sensor networks for landslide prediction[C]∥Proceedings of the 5th International Conference on Information Processing in Sensor Networks,2006:109-116.
[2] 孙利民,李建中,陈 渝,等.无线传感器网络[M].北京:清华大学出版社,2005.
[3] Feng Wenjiang,Bi Xiaowei,Jiang Rong.A novel adaptive cooperative location algorithm for wireless sensor networks[J].International Journal of Automation and Computing,2012,9(5):539-544.
[4] 夏心江,胡 钢,王烨华.基于锚球交域重心的WSNs 三维定位算法研究[J].计算机工程与应用,2013,49(10):76-79.
[5] 冯冬青,赵志远.基于RSSI 的无线传感器网络改进定位算法[J].广西大学学报:自然科学版,2012,37(6):1158-1163.
[6] Anil Kumar,Arun Khosla,Jasbir Singh Saini,et al.Stochastic algorithms for 3D node localization in anisotropic wireless sensor networks[C]∥Proceedings of Seventh International Conference on Bio-Inspired Computing,2012:56-70.
[7] 赵雁航,钱志鸿,尚小航,等.基于跳距修正粒子群优化的WSNs 定位算法[J].通信学报,2013,34(9):105-114.
[8] 李文田.RSSI 定位算法在滑坡监测系统的应用研究[D].重庆:重庆大学,2012.
[9] Gao Leina,Peng Jianshe.Research on ranging optimization and twice-weighted centroid calculation in wireless sensor networks localization algorithm[J].The Open Automation and Control Systems Journal,2013,5:154-160.
[10]Massimo Vecchio,Roberto Lopez-Valcarce,Francesco Marcelloni.Solving the node localization problem in WSNs by a two-objective evolutionary algorithm and local descent[J].IEEE Signal Processing Mag,2010,22(4):54-69.
[11]Chuku N,Pal A,Nasipuri A.An RSSI-based localization scheme for wireless sensor networks to mitigate shadowing effects[C]∥Proceedings of the IEEE,2013:1-6.
[12]Quan Dedong,Xu Xu.A novel weighted centroid localization algorithm based on RSSI for an outdoor environment[J].Journal of Communications,2014,9(3):279-285.
猜你喜欢
水利科学与寒区工程(2022年7期)2022-08-10
成都信息工程大学学报(2022年3期)2022-07-21
中学生数理化·八年级物理人教版(2021年12期)2021-12-31
煤炭学报(2021年11期)2021-12-09
沈阳师范大学学报(教育科学版)(2021年2期)2021-02-01
应用数学(2020年2期)2020-06-24
水力发电(2020年12期)2020-03-12
山西煤炭(2019年2期)2019-08-29
自动化学报(2017年7期)2017-04-18
现代电子技术(2016年15期)2016-12-01