蜂窝网无线定位技术在铁路场景下的应用
2015-03-27 07:53文思扬李国宁令小宁
传感器与微系统 2015年5期
文思扬,李国宁,令小宁
(兰州交通大学 自动化与电气工程学院,甘肃 兰州730070)
0 引 言
列车位置信息是列车运行控制系统中的主要参数之一。目前其信息的获取,依赖于轨道电路、点式应答器等传统信号设备[1],导致系统的建造成本和建成后的运营维护成本都非常高。
近几年,蜂窝网定位技术发展迅速。杨天池[2]对传统的CHAN 定位算法进行了改进,提高了精度。徐波[3]提出一种到达时间(TOA)模式下总体最小二乘辅助泰勒级数展开的新定位算法,克服了泰勒级数展开对初始迭代参考点依赖性强的问题。但针对铁路环境的蜂窝网定位问题,所发表的文献却相对较少,主要原因是研究面临两个方面的问题[4]:
1)定位参数的测量:传统定位算法对定位参数的要求非常严格,以电波TOA 定位需要至少获取3 个基站以上的定位信息才能进行定位,而铁路沿线自然环境复杂,无线电波传播不稳定,有可能出现定位参数无法获得或获得的定位参数无法满足定位条件的情况,以致不能完成定位。
2)定位参数的误差:由于无线电波在传播过程中,会发生反射、绕射、散射,造成定位参数的误差,导致定位精度不高。
本文以铁路的特殊环境为背景,根据列车速度传感器和蜂窝网TOA/到达角(AOA)的定位模型,建立一种无线列车定位系统。此系统满足在定位信息冗余时,可提高定位精度;在定位信息不足时,也能给出相对可靠定位结果的需求。系统的求解属于NP 问题,引入改进后的粒子群优化(PSO)算法对模型进行求解,进一步提高了定位精度,结果用Matlab 进行编程仿真验证。
1 速度传感器定位模型
基于速度传感器的定位方法是最常用的列车定位方法。但是列车在运行过程中,机车轮会不可避免地发生空转和滑行,造成定位误差。对此问题国内外学者进行了大量的研究[5,6]。目前采用的方法是先检测到列车运行过程中的空转和滑行,然后对此产生的误差进行补偿。
文献[6]不仅列车的定位积累误差被有效抑制,还可从结果分析出列车在整段运行区间内的误差服从正态分布。本文以此建立速度传感器定位模型。
假设列车在t 时刻,由速度传感器参数积分得到,列车的位置S0。由于测速传感器和补偿门限选择本身所带来的误差,列车位置在区间(S1,S2)上,服从一个数学期望为μ,方差为σ2的正态分布,如图1 所示。其中数学期望μ=S0。通过正态分布的概率密度函数

可以得到列车在区间内每一点的概率。
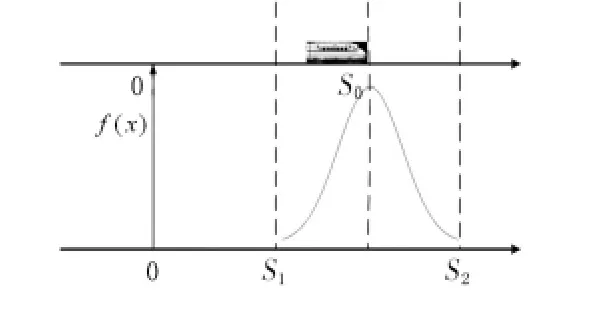
图1 速度传感器定位模型Fig 1 Speed sensor positioning model
2 无线蜂窝网定位模型
TOA 和AOA 的定位信息都是通过对电波测量得到的测量值。由于电波的特性和传播环境的复杂,这些测量值都会存在大量的误差[7]。本文采用文献[8,9]的方法,如图2 所示,TOA 的测量是一个以基站为圆心,列车与基站之间距离r 为半径的圆。如果考虑误差,列车可能的位置区域就是一个环形;同理,由AOA 测量确定的列车可能的位置区域将会是一个扇形。其数学表达分别为

在以上两个区域中每一个点的概率,需要预先对误差进行统计分析确定。不同基站的设备在不同的环境下,产生的误差可能会不同。
3 列车定位系统
根据上述的分析,对列车的定位问题转化为已知列车在若干区域位置的概率,计算区域位置概率叠加的最大值,以确定列车最准确的位置(如图3)。

图2 GSM-R 网络定位模型Fig 2 Positioning model of GSM-R network
本文采用实数编码。算法适应度的取值为

式中 s 为参与定位的可能区域的个数;λk为第k 个可能区域的概率;δk为可能位置的区域适应度,如果染色体位于第k 个可能的位置区域,则δk=1;否则,δk=0。适应度的值为概率值的组合,在确定的坐标范围内进行搜索,使适应度的值尽可能的大。

图3 列车定位算法示意图Fig 3 Diagram of train positioning algorithm
4 求解过程
传统PSO 算法在进化过程中会出现过早收敛于局部最优点等缺点,导致收敛精度的降低并且收敛速度较慢。针对这种情况,国内外的专家提出了解决的方案,使用自适应权重来控制算法的速度,并且引入遗传算法中的变异操作PSO 中,标定变异概率,用生成的新粒子不断地替代原来的粒子,从而使粒子跳出局部最优解。对其中的主要操作步骤进行简要介绍。
4.1 自适应惯性权重
粒子的速度与位置更新的公式为

改变w 的取值可明显改善算法的收敛性能。算法初期需要较大的w 值来增强全局搜索能力,但是当算法迭代到后期,需要较小的w 值来增强局部的挖掘能力,使其避免越过最优解。因此,本文通过自适应变化w 值来控制算法进程,以考虑到粒子全局和局部搜索能力,使之能够快速的找到最优解。设wmax,wmin分别是w 的最大值和最小值,iter,itermax分别是当前迭代次数和最大迭代次数,则有

在更新过程中,粒子每一维的最大速率限制在wmax,每一维的坐标也被限制在允许范围内。同时,pbesti与gbesti在迭代过程中更新,最后输出的gbesti就是算法得到的最优解[10]。
4.2 变 异
对于实数编码的粒子,变异不像二进制编码那样进行简单的取反操作。本文采用均匀变异操作具体如下,均匀性变异则是父代中向量中随机地选择一个分量,假设是第k 个,然后,再其定义区间[0,λmax]中均匀随机地选取一个数代替v 以得到zi,即[11]

其具体步骤如下:
1)设定相关参数:粒子群的数目、PSO 权重因子、粒子群惯性因子、变异概率以及最大进化代数;
2)生成初始粒子N 个,初始化每个粒子的位置及其速度,对所得种群的适应度进行评估,得到粒子的个体最优值pbesti和种群的最优值gbesti;
3)根据自适应惯性权重对每一个粒子按照式(4)、式(5)、式(6)更新速度和位置,迭代生成下一代种群;
4)按适应度值随机选出K 个适应度值较高的个体,对其进行复制产生粒子N-K 个个体,替换掉原有的N-K 个粒子,形成新一代的种群,对新种群进行变异式(10)操作,与原有个体最优值pbesti和种群的最优值gbesti进行比较,更优进行替换;
5)判断是否达到最大迭代次数,如果达到迭代最大值,输出结果;否则,返回步骤(3);
6)输出最优值,算法结束。
5 算例分析
针对引言中的分析,对定位系统的性能进行检验。本次仿真用本文的方案、未进行算法改进的方案(即采用粒子群算法求解的方案)和文献[8]中的方案(即只采用GSM—R 网络定位)进行对比。
仿真环境设置:在济南—连云港之间选取一段2 000 m的线路,基站BS1 和BS2 位置坐标分别为(0,100)m 和(2000,100)m,覆盖区域为椭圆。列车匀速行驶,真实位置(857.1,0)m。BS1,BS2 的TOA 测量服从期望为857.1 m,标准差为100 m 的高斯分布;AOA 测量服从标准差为0.1 rad的均匀分布;速度传感器定位模型服从期望为857.1 m,标准差为35 m 的高斯分布,如图4 所示。
6 仿真与结果分析
1)定位系统的有效性(只有一个基站参与定位)
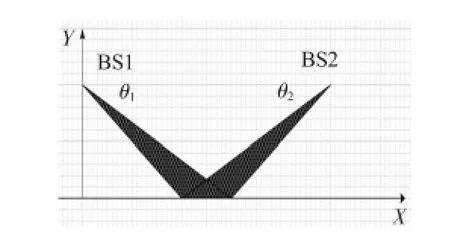
图4 仿真环境示意图Fig 4 Diagram of simulation environment
算法相关参数设置为粒子数目为N=200,最大迭代次数M=100,交叉概率pc=0.8,变异的概率为pm=0.1,c1=c2=2,w=1.6。仿真进行500 次,定位结果如图5 所示。定位点分布采用直方图统计,如图6 所示。将500 次搜索结果进行平均得出最终的位置结果如表1 所示。

图5 定位结果Fig 5 Results of positioning

图6 各方案误差分布Fig 6 Error distribution of different schemes

表1 各方案结果对比Tab 1 Result comparison of different schemes
从图6 可以得出:本文方案的实验点85.4%的概率分布在20 m 的范围内,99.8%的概率分布在40 m 的范围内;未改进方案的概率分别为69.8%,96.4%;文献中的方案分别为58%,93.6%。
从表1 可以看出:在单基站定位时,三种方案都可给出有效的定位结果。加入速度传感器定位模型后的方案较文献中给出的方案定位误差减小了3.5 m。改进算法后误差进一步减小了2.2 m。同时,定位精度分别提高了7.6,5.1 m。
2)不同定位条件下算法的有效性
定位条件如表2。

表2 5 种不同的定位条件Tab 2 5 different positioning conditions
定位的评价指标用均方根误差(RMSE)表示

仿真结果如图7 所示,从图中可以看出:在A 条件下文献方案无法完成定位,而未改进方案和本文方案都给出了均方差35 m 左右的定位结果。
在B 条件下,文献方案在只能获取BS1 基站的TOA 定位参数时,定位出现很大的偏差。而未改进方案和本文方案,在缺乏定位参数,传统方法无法定位的情况下,仍能给出均方差28 m 左右的定位结果。
在C,D,E 条件下,随着参数从充分到冗余,定位方案的精度不断提高,并始终保持着最高的定位精度。
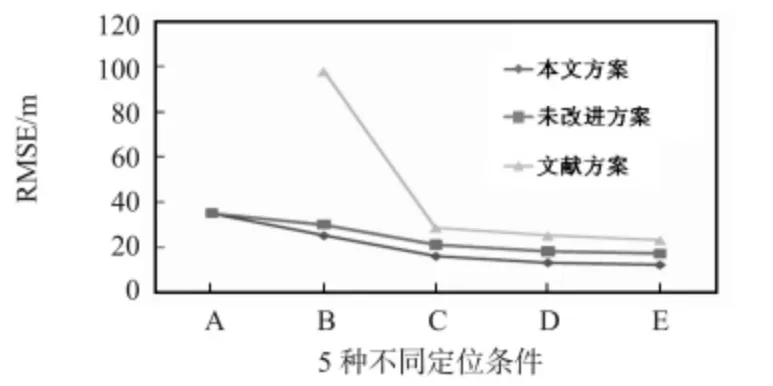
图7 5 种不同条件的定位结果Fig 7 Positioning results of 5 different conditions
7 结束语
本文根据列车速度传感器和蜂窝网无线定位技术的特点,建立不依赖地面设备的列车定位系统。仿真结果表明:系统有效克服了蜂窝网络定位技术在铁路环境中应用的困难,减少了使用速度传感器定位的误差,并且在定位信息充分非必要时,可提高定位精度;在定位信息非充分必要时,也能给出相对可靠的结果,具有较高的应用前景。
[1] 张 辉.基于GNSS/ODO 的列车定位方法研究[D].北京:北京交通大学,2008.
[2] 杨天池,金 梁,程 娟.一种基于TOA 定位的CHAN 改进算法[J].电子学报,2009,37(4):819-822.
[3] 徐 波,陈建云,钟小鹏.TOA 模式下TLS 辅助泰勒级数展开的蜂窝定位新算法[J].系统工程与电子技术,2011,33(6):1398-1402.
[4] 熊 磊,朱 刚,谈振辉.铁路交通中基于通信的无线定位问题分析[J].铁道学报,2004,26(1):73-76.
[5] Ssaab S S,Nasr G E,Badr E A.Compensation of axle-generator errors due to wheel slip and slide[J].IEEE Transaction on Vehicular Technology,2002,51(3):35-37.
[6] 周达天.基于多传感器信息融合的列车定位方法研究[D].北京:北京交通大学,2007.
[7] 范平志,邓 平,刘 林.蜂窝网无线定位[M].北京:电子工业出版社,2001:31-50.
[8] 刘军搏,王建辉,王大鸣,等.基于改进遗传算法的开放式鲁棒融合定位方法[J].计算机应用研究,2012,29(11):4309-4311.
[9] 王建辉.基于信息融合的蜂窝网定位技术研究[D].郑州:解放军信息工程大学,2011.
[10]阳春华,谷丽姗,桂卫华.自适应变异的粒子群优化算法[J].计算机工程,2008,34(16):188-190.
[11]於世为,魏一鸣,诸克军.基于粒子群—遗传的混合优化算法[J].系统工程与电子技术,2011,33(7):1648-1652.
猜你喜欢
计算机仿真(2022年8期)2022-09-28
现代装饰(2021年1期)2021-03-29
四川冶金(2019年5期)2019-12-23
郑州大学学报(工学版)(2018年2期)2018-04-13
知识就是力量(2018年3期)2018-03-08
电子制作(2017年8期)2017-06-05
探索科学(2017年4期)2017-05-04
中国交通信息化(2016年8期)2016-06-06
中国塑料(2016年11期)2016-04-16
移动通信(2015年17期)2015-08-24