非扫描激光三维成像主控电路设计与实现
2015-04-06 02:08陈斌,刘波,赵欣
激光与红外 2015年7期
陈 斌,刘 波,赵 欣
(1.固体激光技术重点实验室,北京100015;2.北方科技信息研究所,北京100010)
·激光应用技术·
非扫描激光三维成像主控电路设计与实现
陈 斌1,刘 波1,赵 欣2
(1.固体激光技术重点实验室,北京100015;2.北方科技信息研究所,北京100010)
在非扫描激光三维成像系统中,各分系统(部件)接口众多、关系复杂。各单元需要在适当的时序控制下实时完成各自的功能,主控电路在系统中负责时序控制、数据采集、处理运算、接口通讯等功能,是系统的核心部件之一。本文采用DSP和FPGA相结合的方式,充分利用它们各自的控制灵活、实时运算的特点,完成了主控电路的上述功能,实现了成像过程全自动、帧频达到25Hz的要求,为实现原理样机转化为工程样机打下了技术基础。
激光三维成像;DSP;TMS320F28335;FPGA;EP2C8
1 引 言
非扫描激光三维成像是利用脉冲激光器照射目标,采用两路或多路不同增益调制模式的ICCD同时探测目标各像素点的信号强弱,对两路或多路ICCD上对应像素点的信号强弱进行采集和解算,可以得到各像素点的距离信息,完成非扫描激光三维成像。这种成像方式最大优点是成像速度快,本次样机最高帧频可达25帧/s,而且没有机械扫描结构,系统可靠性大大提高。
激光三维成像系统可分为前端成像机头、运动转台和操控系统所组成。本文介绍的基于DSP的激光三维成像主控电路是属于前端机头中的一部分,协调机头中各分系统正常运行,同时完成对操控系统通讯、执行操控系统指令,并将各个分系统状态实时传输到操控系统进行显示。
为满足激光三维成像系统工程化、小型化、处理实时化的需求,激光三维成像主控电路采用高性能DSP和FPGA的电子学结构。使用这两种高性能处理芯片的架构设计,主要有如下优势:一是能充分利用FPGA芯片的高效可配置及DSP芯片的丰富的外设、接口功能,将众多的分系统(部件)如激光电源、温控模块、激光测距、扩束镜头调焦、CCD触发、像增强器控制、数字图像处理(DIP)、人机交互等部分耦合到一起,使各分系统在DSP/FPGA控制下协调地完成实时三维成像;二是充分发挥DSP+FPGA实时处理能力强的优点,强有力支持图像处理、激光测距等实时性要求很高的部件需求,同时其出色的运算、控制能力带来的系统可靠性能提高。
2 系统原理
图1是整个主控系统的原理框图。在主控系统中,主要集成了如下功能:
· 激光测距;
· 镜头控制;
· 时序产生;
· 数据采集;
· 信号处理;
· 各个分部件控制及通讯。
在激光三维成像中,目标距离像由目标点相对于视场中心点距离和视场中心点相对于观测点距离两部分组成,非扫描式三维成像系统能得到目标各点相对视场中心点的距离,视场中心点的绝对距离则通过激光测距功能得到。为降低系统复杂性、减小体积重量,设计中采用成像激光光源作为测距光源,但由于光源发散角范围较大(1°~25°),目标的有效反射面积也比较大。为了测量精确,我们减小测距接收视场,使用小视场角测量特定点的绝对距离,同时也可以减小背景噪声。激光测距功能由TMS320F28335芯片的部分功能完成,此外该芯片同时还需要完成全机头时序控制、激光扩束镜头的调焦、激光驱动电源的控制、温控电路的控制、激光回波接收电路控制、主控芯片的通讯等功能。

图1 系统原理框图
镜头调焦功能可调激光光束角,以适应测量远近、大小各不同的目标要求,可变范围在1°~25°之间。三维成像对照射的光斑要求很高,尽可能的使光斑均匀覆盖整个目标,使被测目标单位面积覆盖的激光能量达到最大,更利于目标的识别。在DSP控制下,镜头调焦功能有两种,一种是手动调焦,利用主控台操作控制激光光斑大小,此时1°~25°的变化范围可分为640个细分来调节。另一种是自动调焦,完全根据目标距离自动计算焦距档位,使光斑自适应目标远近要求。
信号同步功能是系统能否正常工作的关键功能。台上系统的各个分系统需要在同一的同步控制下才能协同工作。包括系统的时统设定、激光时统同步、电源时统,相机A和相机 B的触发时统;激光主波同步触发激光测距、像增强器、并根据激光测距距离动态延时完成波门选通门宽控制。图2是各个分系统的时序关系。分系统的时序控制关系主要由EP2C8芯片来控制完成,倍频后达200MHz的时钟处理速度,完全满足系统要求。

图2 各分系统的时序关系
分部件的控制及通讯主要是控制及监控。通过RS-422/RS-485/SPI等协议完成对各个部件的功能控制和分部件状态的监控。
下面,我们将针对各个功能模块,介绍其硬件、软件实现方式。
3 硬件组成和软件设计
主控系统按功能分将分为三大部分,第一部分是以TI TMS320F28335为核心的激光测距和数据处理模块设计,主要完成跟激光测距相关的功能;第二部分是以ALTERA EP2C8为核心的信号时序功能模块设计,主要完成各分部件时序的控制;第三部分还是使用TMS320F28335为核心总控前面所述的两个功能模块,完成模块间的通讯以及和外部系统的通讯、控制、监控。
3.1 激光测距模块设计
图3是激光测距模块的硬件设计框图。

图3 激光测距硬件设计框图
主控芯片和测距模块通过高速SPI接口进行互连通讯,传递各类参数和控制信息。SPI是同步串行外设接口总线,对于双CPU互连是比较简单的解决方案,本系统中的SPI总线最高时钟频率37.5MHz,对于本系统最高25Hz的设计频率,按每一帧单向100Byte算,作为SPI从机的测距模块能在22μs内能将所有字节传递到主控芯片,同样由于SPI是双向的,因此作为SPI主机的主控芯片也能传递100Byte的数据量到从机。
激光时统从主控芯片获取,通过GPIO连接。28335的GPIO引脚除了可以复用成外设引脚,还可以复用成外中断引脚,激光时统使用外中断的上升沿触发进入中断进而完成下一步时序功能。
激光主波、激光回波使用eCap模块进行信号的捕获,以完成开关门信号的计时。28335的eCap模块最小时间分辨率为6.67 ns,可对设定的沿极性进行触发,但它最大的优点在于它在一个通道里可以完成连续模式的前后捕获4个脉冲,通过程序甄别出多个距离中的有效目标距离,滤除通道里的误触发和噪声干扰,提高测距信噪比,增大探测距离。激光电源和温控电路通过SN74LVC245A接口芯片和DSP互连,防止电平不一致造成损坏。
调焦镜头采用MAXON电机进行控制,该电机具有合适减速比的行星减速箱,并带有512线的磁编码器,提供角度反馈信息给DSP,DSP根据捕获的角度信息通过ePWM模块再控制电机的转向、转速,最终控制电机的转动角度以达到控制镜头焦距的功能。
3.2 信号时序模块及主控模块设计
各分系统是在统一严格的时序控制下工作,靠EP2C8来完成时序控制,但由于各分系统接口众多,除时序控制信号同步外,还有串口控制以实时改变各分系统状态,因此EP2C8和主控DSP其实是协同工作,它们通过16 bit宽的数据总线,5bit宽的地址总线接口完成数据通讯及寄存器配置。
在使用各时序信号时,为防止电平不匹配,增大驱动能力,我们使用了SN74LVC2T45DCTT接口芯片,该芯片具有双电平转换,两路输入输出,最大可达420 Mbps的传输速度,可作为各路窄脉冲同步信号的传输接口。
另外系统中大量使用ADM2582串口驱动芯片,该芯片具有隔离电源的RS-422/485接口,在连接各个分系统的接口时能隔离地传输,有效保护核心电路。
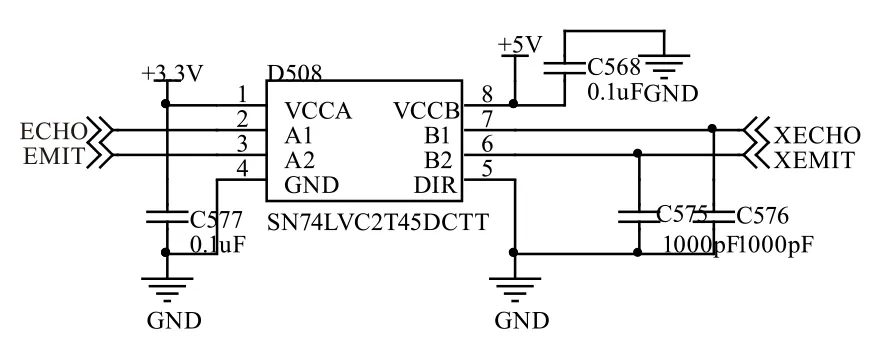
图4 高速电平转换原理图
4 实验结论
主控系统板在三维成像系统中运行正常,各分系统控制、监控良好。图5是对五百多米的一幢大楼的三维成像效果图,由不同颜色表示不同的距离值,蓝色表示的距离最近,红色最远。从图中可以看出伪彩颜色表示的距离渐变效果,有效地重构出目标的三维图像。

图5 三维成像效果图
5 结 论
本文介绍了基于DSP和FPGA的非扫描激光三位成像主控电路系统的实现,本控制系统使用双DSP处理芯片和FPGA控制,完成设计的各项功能,使激光三维成像系统各部分可协调工作,取得有效实验结果。采用了该控制电路的三维成像原理样机达到距离分辨率0.5 m,测程500 m的技术指标。但是本次设计仍有需要改进的地方,譬如窄脉冲长线传输时失真较大,DSP的SCI接口在速度高时丢包较严重,需要在下一步工作中解决。
[1] JIN Chenfei,ZHAO Yuan,ZHANG Yong,et al.Experimental rese-arch on a scannerless 3D Imaging laser radar[J].Chinese Journal of Lasers,2009,36(6):1383-1387.(in Chinese) 靳辰飞,赵远,张勇,等.一种无扫描三维成像激光雷达的实验研究[J].中国激光,2009,36(6):1383-1387.
[2] ZHAO Baosheng,CHEN Min.The application of MS-streak tube in three-dimensional lidar system[J].Acta Photonica Sinica,2004,33(12):1425-1427.(in Chinese) 赵宝升,陈敏.采用多狭缝条纹管实现激光三维成像[J].光子学报,2004,33(12):1425-1427.
[3] LIU Bo,ZHANG Ying,CAO Changdong,et al.Range accuracy analysis for scannerless 3D laser image system[J].Laser & Infrared,2013,43(4):376-379.(in Chinese) 刘波,张颖,曹昌东,等.亮度调制无扫描激光三维成像距离精度分析[J].激光与红外,2013,43(4):376-379.
[4] Gelbart A,Redman B,et al.Flash lidar based on multiple-slit streak tube imaging lidar[J].Proceedings of SPIE,2002,4723:9-13.
[5] Maritza R Muguira,John T Sackos,Bart D Bradley.Scannerless range imaging with a square wave[J].Proceedings of SPIE,1995,24:106-113.
[6] Richard M Marino,W R Davis,G C Rich,et al.High-resolution 3D imaging laser radar flight test experiments[J].Proceedings of SPIE,2005,5791:138-151.
[7] Schmitt R L,Williams R J,Matthews J D.High-frequency scannerless imaging laser radar for industrial inspection and measurement applications[R].Sandia:Sandia Report,1996:1-5.
Design and implement of non-scanning laser 3D imaging control system
CHEN Bin1,LIU Bo1,ZHAO Xin2
(1.Science and Technology on Solid-State Laser Laboratory,Beijing 100015,China;2.North Institute for Scientific&Technical Information,Beijing 100010,China)
In non-scanning laser 3D imaging system,there are many sub-systems (components)which need to run real-time according to a proper sequence.The main control part has the functions of sequence controlling,data collecting,result computing,communicating and interface controlling,and it is one of the core parts.According to the characteristics of DSP and FPGA,the combined structure of DSP and FPGA is adopted to implement the main control part.Automatic imaging is achieved and the frame rate reaches 25Hz.This contributes to the engineerization of the prototype.
laser 3D imaging;DSP;FPGA;TMS320F28335;EP2C8
陈 斌(1979-),男,硕士研究生,专业方向为激光测距信号处理。E-mail:bin.chen@163.com
2015-02-02
1001-5078(2015)07-0766-04
TN249
A
10.3969/j.issn.1001-5078.2015.07.007
猜你喜欢
中国农业信息(2021年3期)2021-11-22
测控技术(2018年6期)2018-11-25
通信电源技术(2018年5期)2018-08-23
电子制作(2017年13期)2017-12-15
制导与引信(2017年3期)2017-11-02
电子制作(2016年15期)2017-01-15
光学精密工程(2016年4期)2016-11-07
系统工程与电子技术(2016年7期)2016-08-21
空间控制技术与应用(2015年1期)2015-06-05
河南科技(2014年15期)2014-02-27