摆臂式干涉仪光程差扫描模型及其仿真
2015-04-06 02:08谢运涛张玉钧
激光与红外 2015年7期
谢运涛,张玉钧
(1.电子工程学院脉冲功率激光技术国家重点实验室,安徽 合肥 230037;2.中国科学院安徽光学精密机械研究所,安徽 合肥 230031)
·光电技术与系统·
摆臂式干涉仪光程差扫描模型及其仿真
谢运涛1,张玉钧2
(1.电子工程学院脉冲功率激光技术国家重点实验室,安徽 合肥 230037;2.中国科学院安徽光学精密机械研究所,安徽 合肥 230031)
为实现摆臂式干涉仪光程差(OPD)随时间的线性变化,需要摆臂式干涉仪作变速摆动。为此,在分析摆臂式干涉仪光程扫描系统组成的基础上,对干涉仪的电气特性进行了研究,在saber软件中建立了摆臂式干涉仪光程差扫描模型。为验证模型的正确性,将PID算法应用到摆臂干涉仪模型仿真中,研究了干涉仪系统的单位阶跃响应,确定了摆臂式干涉仪PID控制算法的各项参数。仿真结果表明,该模型可用于模拟摆臂式干涉仪光程差扫描过程,能够为干涉仪扫描控制系统的设计提供参考。
仿真模型;摆臂式干涉仪;PID算法;saber软件
1 引 言
傅里叶变换红外光谱仪是一种高灵敏度、高光谱分辨率的红外光谱探测设备,广泛应用于航天高光谱照相[1]、气体浓度检测[2-4]等领域。傅里叶变换红外光谱仪是利用干涉仪对光信号的调制作用得到光信号的干涉图,然后对干涉图进行逆傅里叶变换得到原始光信号的光谱图。整个过程中干涉仪发挥着重要作用,其性能直接影响到干涉图的质量。传统迈克尔逊干涉仪采用单平面镜直线往复式运动结构,其动镜易受到噪声干扰产生倾斜,造成干涉图调制度的降低,进一步影响光谱图质量[5]。摆臂式干涉仪采用摆动式结构,双立体角镜分别固定于叉骨左右两臂,随着叉骨一起摆动。两个角镜的运动具有一致性,可有效抵消倾斜对光谱图质量的影响,因此摆臂式干涉仪可用于光谱质量要求较高的场合。但摆臂式干涉仪也存在一些缺陷,其光程差(OPD)与摆动角度不成线性关系。为实现光程差的均匀变化,要求摆臂式干涉仪能够实现变速转动,这就对干涉仪控制系统提出了很高的要求。
目前对于摆臂式干涉仪的控制方法有很多种,如PID法、极点匹配法和模糊滑模变结构控制法,但究竟哪种方法更合适并没有结论。一般而言,评价干涉仪控制效果的方法主要有两种。一是实验验证,对上述方法逐一进行实验,将测得的参数进行对比,从而实现对算法控制效果的评价,这种方法最贴近实际,评价最客观,但资源消耗大、操作复杂,研究周期较长。另一种方法是通过建立干涉仪光程差扫描仿真模型,将上述算法应用于干涉仪控制当中,对仿真结果进行评价。该方法可有效减少系统复杂度,缩短研究周期,目前该方面的研究较少。本文通过建立摆臂式干涉仪扫描系统的saber仿真模型,通过仿真检验了该模型的正确性,可为优化干涉仪光程差扫描控制系统的设计提供参考。
2 摆臂式干涉仪扫描系统组成
摆臂式干涉仪扫描控制系统包括光学仪器、电路设备、机械设备等装置[6],其内容涉及光的干涉、数字电路、智能控制等方面,是一个复杂的光机电一体化平台,其组成结构如图1所示。首先,参考激光在干涉仪内形成干涉,同时在探测器表面形成干涉,由探测器对干涉信号进行光电转换。进一步,由处理电路对干涉信号进行处理,得到反映干涉仪光程差变化的信号。再由运动控制系统发出信号,通过驱动电路实现对音圈电机转动的控制。
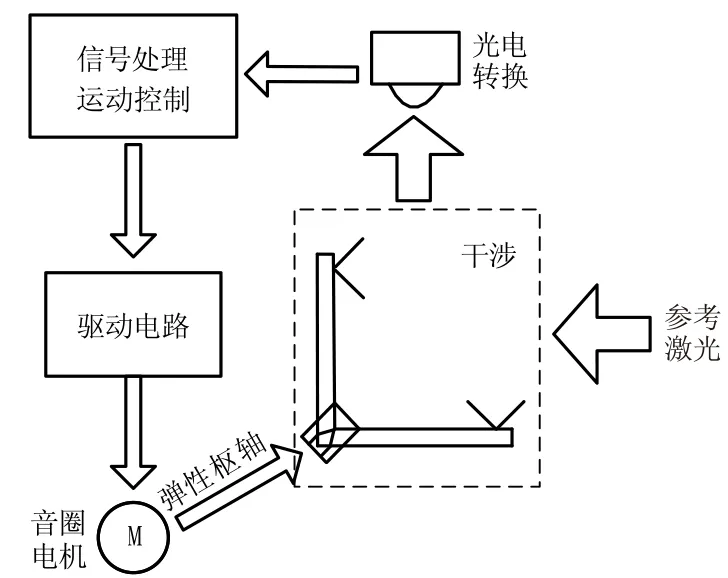
图1 摆臂式干涉仪光程差扫描系统组成
3 摆臂式干涉仪扫描系统模型
Saber仿真软件包含了多种机械及电子仿真模块,可以方便地进行机械系统、电路系统的仿真,能够以数据、曲线图的形式给出仿真结果,非常适合于光机电一体化的平台的仿真分析。通过saber软件[7-8]建立的摆臂式干涉仪仿真模型如图2所示。主要包括音圈电机模型(vcm)、电机驱动系统模型(pwm和driver_circuit)、光程差反馈系统模型(opd_feedback)、控制系统模型(dsp_ctrl_pid)等四部分。电机驱动系统在控制系统的作用下控制输出电压的大小,达到控制音圈电机转动的目的。摆臂式干涉仪与音圈电机之间通过弹性枢轴连接,当电机发生转动并带动干涉仪摆动时,干涉仪光程差开始发生变化,光程差反馈系统能够实时测量干涉仪光程差信息并将信息反馈到控制系统,控制系统可依据上述信息对电机驱动系统进行调节,从而实现干涉仪扫描系统的闭环反馈控制。控制系统模块内可以装载不同的控制算法,通过比较不同算法控制下干涉仪光程差变化的均匀性,可以对算法的控制效果进行评价。以上模型中,音圈电机vcm模块是整个系统中最复杂的部分,它是机械与电力系统的结合点。

图2 摆臂式干涉仪仿真模型
音圈电机通过弹性枢轴与摆臂式干涉仪相连,弹性枢轴产生的力矩与电机转动的角度成线性关系,同时音圈电机又在电力系统的作用下产生转动力矩。电机输入电压与转动角速度关系可通过图3所示简化电气模型进行解释。
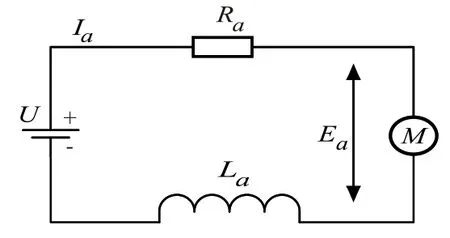
图3 音圈电机电气模型
音圈电机中既有电磁运动,又有机械运动,可将这一对象分为三个部分。
(1)机械部分
(1)
(2)电磁部分
(2)
(3)机电耦合
Ea=kbω
(3)
M=kdIa
(4)
其中,u(t)为电枢电压;Ea为反电动势;Ia为电枢电流;Ra为电枢电阻;La为电枢电感;M为电磁力矩;ω为电机轴角速度;J为电动机总的转动惯量;f为电动机和负载折算到轴上的等效黏性阻尼系数;kb为电机反电动势常数;kd为电动机的力矩系数;k为弹性枢轴的弹性系数。
将以上公式转化为MAST语言后,即可在saber软件环境中建立音圈电机模型。
4 计算机仿真
4.1PID控制方法
为验证所建模型的正确性,选择PID算法作为干涉仪的控制方法。PID算法是按偏差的比例、积分和微分进行控制算法,是连续控制系统中技术成熟,应用最为广泛的一种控制算法[9]。
为获得PID算法中的各项参数,首先要对原系统的单位阶跃响应进行分析。音圈电机各项参数如表1所示。将干涉仪组成速度反馈闭环控制系统后得到的系统单位阶跃响应如图4所示。可以看出系统存在响应速度较慢,动态性能不足的问题。

表1 音圈电机参数

图4 基于速度反馈控制的系统单位阶跃响应
将PID算法应用与干涉仪控制中,采用4∶1衰减曲线法得到PID算法内的各项参数:Kp=23840;Ti=1.578×10-4;Td=5.26×10-5。其中,Kp表示比例系数,Ti表示积分常数,Td表示微分常数。将PID算法与干涉仪系统组成控制闭环,得到系统单位阶跃响应如图5所示。可以看出,系统响应速度与动态性能都有了很大提高。
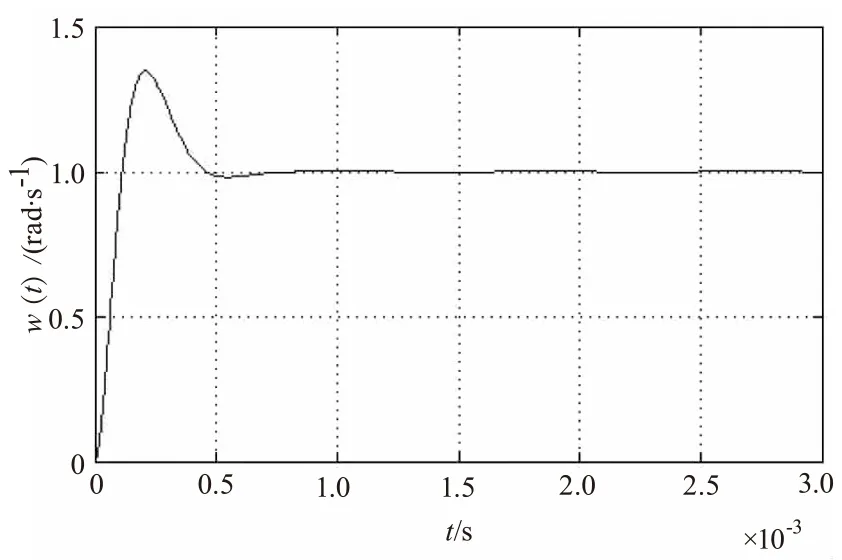
图5 基于PID控制的系统单位阶跃响应
4.2 PID控制仿真
在saber软件中,将上述PID算法转化为MAST语言后,装载到dsp_ctrl_pid模块中,仿真得到的干涉仪光程差变化速度随时间的变化如图6所示。可以看出,电机在掉头过程中(2.41 s到2.50 s之间),光程差存在一定时间的不稳定过程,光程差速度超调约为35.6%。运动平稳后(2.50 s到3.83 s之间),光程差均匀变化,变化速度大约为1 cm/s,最大速度偏移为0.2%,优于光谱仪对对光程差速度偏差小于1%的要求[10]。
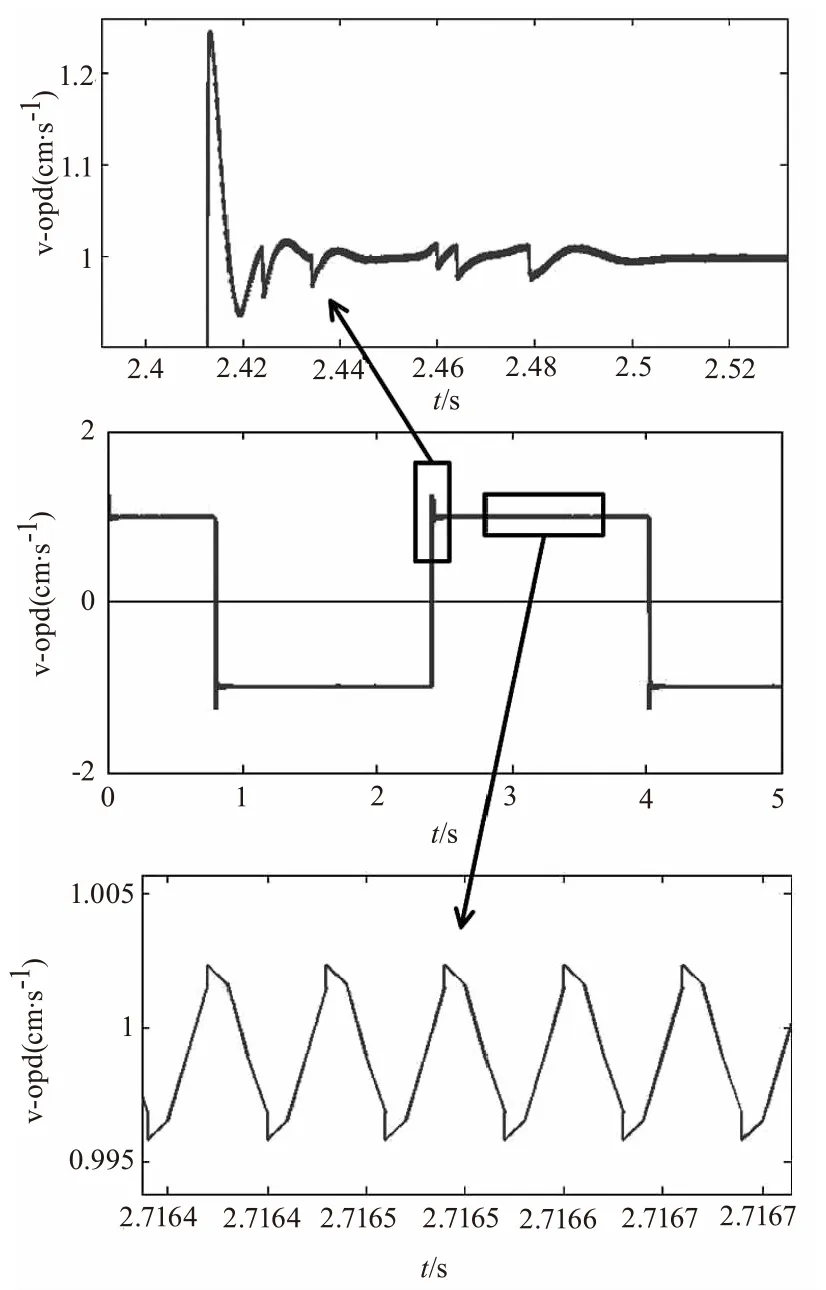
图6 干涉仪光程差变化速度
5 结 论
论文分析了摆臂式干涉仪的电气特性,建立了摆臂式干涉仪的数学模型,通过saber软件建立了摆臂式干涉仪的扫描控制仿真模型。对干涉仪扫描系统单位阶跃响应进行了分析,采用PID算法对干涉仪扫描系统进行控制,有效改善了系统的动态响应性能。在仿真模型中应用PID算法实现了对干涉仪扫描控制系统仿真,仿真结果表明了该模型的有效性。本文的不足之处在于模型建立过程中没有考虑环境干扰对干涉仪摆动的影响,若进一步建立干涉仪的干扰噪声模型,可以得到更加逼真的仿真效果。同时本文仅对PID算法进行了研究,若继续将极点匹配法和模糊滑模变结构控制法应用于仿真,通过对比分析可实现各种控制方法性能的比较,可为优化干涉仪控制系统设计提供参考。
[1] Shimoda H.Overview of japanese earth observation programs[C].Proc.SPIE,2013,8889:888902.
[2] REN Libing,YANG Honglei,WEI Haoyun,et al.Design for multi-gases analyzer based on FTIR principle[J].Infrared and Laser Engineering,2013,42(12):3175-3179(in Chinese) 任利兵,杨宏雷,尉昊赟,等.采用FTIR原理的多组分气体分析仪研制[J].红外与激光工程,2013,42(12):3175-3179.
[3] Rochette L,Smith W L,Howard M,et al.Atmospheric sounder spectrometer for infrared spectral technology:latest development and improvement in the atmospheric sounding technology[C].Proc.SPIE,2009,7457:745702.
[4] JIAO Yang,XU Liang,GAO Minguang,et al.Scanning passive FTIR remote sensing system for pollution gas[J].Laser & Infrared,2013,43(9):1021-1024.(in Chinese)
焦洋,徐亮,高闽光,等.污染气团扫描式FTIR被动遥测系统[J].激光与红外,2013,43(9):1021-1024.
[5] YIN Bangsheng,ZENG Libo,LEI Junfeng,et al.Error analysis of the mirror tilting in spectrum transform interferometer and the study on dynamic alignment technology[J].Optical Instruments,2006,28(1):74-78.(in Chinese) 尹邦胜,曾立波,雷俊锋,等.光谱仪动镜倾斜误差分析及其动态校正技术研究[J].光学仪器,2006,28(1):74-78.
[6] SHI Yufeng.Research on the control technology for the interferometer subsystem in space-borne infrared spectrometer[D].Wuhan:Huazhong University of Science and Technology,2012.(in Chinese) 施宇锋.星载红外光谱仪干涉分系统的控制技术研究[D].武汉:华中科技大学.2012.
[7] WANG Yuxuan.A synthesized failure mode and effects analysis technology based on saber[D].Beijing:Beijing University of Posts and Telecommunications,2013.(in Chinese) 王宇轩.基于SABER的综合故障模式与影响分析(FMEA)技术研究[D].北京:北京邮电大学,2013.
[8] Shuai Jing,Zhang Shaodong,Huang Chunming,et al.Climatology of global gravity wave activity and dissipation revealed by SABER/TIMED temperature observations[J].Science China,2014,57(5):998-1009.
[9] HU Yang,ZAHNG Yajun,YU Jinquan.Design of temperature control circuit for laser diode[J].Infrared and Laser Engineering,2010,39(5) :839-842.(in Chinese) 胡杨,张亚军,于锦泉.用于半导体激光器的温控电路设计[J].红外与激光工程,2010,39(5):839-842.
[10]NIAN Wei,LIU Zhaojun,LIN Zhe,et al.Optical path scanning control system design of the fourier spectrometer[J].Infrared and Laser Engineering,2013,42(8):2085-2091.(in Chinese) 粘伟,刘兆军,林喆,等.傅里叶光谱仪的光程扫描控制系统设计[J].红外与激光工程,2013,42(8): 2085-2091.
OPD scanning model of the swing arm interferometer and its simulation
XIE Yun-tao1,ZHANG Yu-jun2
(1.State Key Laboratory of Power Laser Technology,Electronic Engineering Institute,Hefei 230037,China;2.Anhui Institute of Optics and Fine Mechanics,Chinese Academy of Sciences,Hefei 230031,China)
In order to make the optical path difference of the swing arm interferometer to change linearly with time,the swing velocity of the swing arm interferometer must be nonlinearly varied.Based on the analysis of the optical path difference(OPD) scanning system with the swing arm interferometer,the electrical characteristics of this interferometer are studied,and the OPD scanning simulation model of the interferometer is established by the saber software.To verify the OPD scanning simulation model,the PID algorithm is used for the simulation of this model,and the PID parameters are determined by studying the unit step response of the swing arm interferometer.The results show that this simulation model works well in the process of the OPD scanning,and it can provide a reference for the interferometer optical path difference scanning system design.
simulation model;swing arm interferometer;PID algorithm;saber software
国家高技术研究发展计划项目(No.2013AA065502)资助。
谢运涛(1990-),男,硕士生,主要研究工作是傅里叶变换光谱仪设计。E-mail:996712731@qq.com
2014-09-15;
2014-11-04
1001-5078(2015)07-0821-04
TP391.9
A
10.3969/j.issn.1001-5078.2015.07.019
猜你喜欢
现代仪器与医疗(2021年1期)2021-06-09
建筑机械(2020年3期)2020-03-01
建筑机械(2020年7期)2020-02-22
制造技术与机床(2019年11期)2019-12-04
天文研究与技术(2019年4期)2019-10-23
测控技术(2018年1期)2018-11-25
电子测试(2018年18期)2018-11-14
传感器与微系统(2018年7期)2018-08-29
应用光学(2015年3期)2015-06-10
河南科技(2014年8期)2014-02-27