并联混合动力客车行车充电控制规则的研究*
2015-04-12 05:08高印寒王庆年曾小华
汽车工程 2015年7期
巴 特,高印寒,王庆年,曾小华
(吉林大学,汽车仿真与控制国家重点实验室,长春 130025)
2015145
并联混合动力客车行车充电控制规则的研究*
巴 特,高印寒,王庆年,曾小华
(吉林大学,汽车仿真与控制国家重点实验室,长春 130025)
以一款ISG并联混合动力客车为对象,对比现存的两种系统效率最优控制算法,并提出一种改进控制算法。应用这3种算法确定行车充电模式切换规则和转矩分配规则,并进行对比仿真和硬件在环试验验证。结果显示,所提出的系统效率最优行车充电控制规则进一步提高了整车经济性;该规则在发动机低效工况行车充电,以相对高效的方式适度发电,既避免了大量能量的二次转化,又通过电机驱动替代发动机低效工作而实现节油。采用该控制规则时车辆的能量经济性比采用其他两种控制规则时分别提升了13%和20%,在验证了控制规则合理性的同时为系统效率最优控制算法的研究和应用提供了参考。
混合动力客车;等效燃油消耗率;系统效率;控制规则;转矩分配
前言
油电混合动力汽车具有油箱和电池两个能量源,而对于非插电式的混合动力系统,电池中的能量来自于再生制动能量回收和发动机/发电机主动补偿。由于行车充电是主动补偿的主要方式,制定行车充电的规则、合理分配转矩、使系统高效工作至关重要。迄今对行车充电转矩分配已有不少研究,其中文献[1]中以总体效率最高为目标,用等效BSFC的方法对混联式混合动力汽车发动机和电机间及两个电机间的转矩分配进行了研究,但在分析系统效率之前,并未对电池充放电效率特性进行分析;文献[2]~文献[4]中针对各自构型都基于系统效率最优的动力源转矩优化分配方法,综合考虑各个关键部件的效率,优化分配了多工况各动力源输出转矩,但在计算总体效率时充入电池的能量直接被视为输出能量,没有考虑这部分能量再次被利用时的效率损失;文献[5]中针对混联混合动力系统建立了充、放电工况的效率模型,将电机和电池等效为发动机和油箱,进而分析系统的综合效率,但文中充入电池功率被视为输入功率,换算为等效油箱的储存功率只考虑了发动机当前热效率,这种假设不合理,与实际能量流不相符。
针对上述研究的不足,本文中对ISG并联混合动力系统各动力总成的效率特性进行研究,提出基于文献的系统等效燃油消耗率改进算法,以等效燃油消耗率最小为目标确定行车充电条件,及该模式下发动机和ISG电机的转矩分配;并与文献所提方法进行仿真对比,从整车经济性和行车充电节油效果两方面验证算法及其所制定规则的合理性。
1 技术方案
1.1 整车参数及动力驱动系统构型
混合动力客车整车参数:满载质量ma=18 000kg,迎风面积A=7.21m2,空气阻力系数CD=0.585,车轮半径r=0.457m,轴距L=6.1m。
所研究的混合动力客车采用单轴并联的结构,发动机通过离合器与ISG电机相连,该离合器控制发动机是否参与驱动,电机后连接5挡变速器输入轴,通过变速器减速增矩可对发动机和电机的工作点进行调节,系统结构如图1所示。
1.2 并联混合动力客车关键部件的效率
并联混合动力系统的效率由部件效率和控制策略决定,控制策略在不同转速和需求转矩下控制发动机和电机的转矩,而电机转矩将影响电池的充放电功率,所以发动机、电机和电池的充放电效率都将随着其工作状态的不同而变化。
本文中通过发动机试验,采用三次多项式插值拟合的方法得到了发动机燃油消耗率与其转速和转矩的关系,并画出了万有特性图(图2)。
电机的效率特性由AVL测功机在恒转速模式设定不同输出转矩测试,所采集的数据经过运算处理后,得到效率万有特性图(图3)。
电池的充放电功率(包括电池端电压和充放电电流)、SOC、环境温度T等因素影响着电池的充放电效率。但根据试验测试和经验分析,电池SOC在0.2~0.8、温度在20~40℃范围内,电池电压和内阻的变化不明显,可简化为单一内阻模型进行计算,因此本文中在计算电池充放电效率时只考虑充放电功率对它的影响。
2 系统效率最优控制算法分析
该并联混合动力系统主要有电动行驶、发动机单独驱动、行车充电和联合驱动4种驱动工作模式;以及机械制动和联合制动两种制动模式。而本文的研究重点是以行车充电模式为例,对比已发表的系统效率计算方法,并提出一种更为合理的系统效率计算方法,依据这种方法制定控制规则。
行车充电模式的工作条件:当SOC低于所设下限且需求转矩较小时,发动机单独工作效率低,这时调整发动机负荷,使其在较为高效区域工作,并控制ISG电机发电,将多余能量转化为电能储存在电池中。
为了平衡电池SOC,行车充电和再生制动的电能将被用于电动行驶模式和联合驱动模式,从而使系统在不同工况下高效工作。
2.1 行车充电模式下动力学方程
按照汽车理论,汽车的行驶方程为
Ft=Ff+Fi+Fw+Fj
(1)
(2)
式中:Ft,Ff,Fi,Fw和Fj分别为车辆驱动力、滚动阻力、坡度阻力、空气阻力和加速阻力;Treq为车辆克服阻力需要发动机和电机共同输出的转矩,后文简称需求转矩;ig和i0为变速器和主减速器的传动比;ηT为传动系的机械效率;G为作用于车辆上的重力;f为滚动阻力系数;i为道路坡度;CD为空气阻力系数;A为迎风面积;ua(km/h),u(m/s)为车辆行驶速度;δ为汽车旋转质量换算系数;m为整车质量;r为车轮半径。
行车充电模式下,ISG电机作为发电机将发动机超过整车需求输出的能量转化为电能。
Treq=Te-Tm
(3)
ωe=ωm
(4)
式中ωe,ωm,Te和Tm分别为发动机和ISG电机的角速度与转矩。
2.2 系统等效燃油消耗率的一般计算方法
针对这样的系统动力学模型,文献中计算其系统效率(即系统等效燃油消耗率)的方法分为两种:
算法一[2-4]:因为行车充电模式下系统能量都来源于发动机,所以将发动机瞬时功率看作系统的输入,而经过传动系传输到车轮用于驱动车辆的功率作为系统输出的一部分,另一部分为经过电力系统充入到电池内的功率,由此计算输入与输出的比值乘以发动机的燃油消耗率,即为系统等效燃油消耗率,如式(5)所示。
(5)
其中:
Pb=Pmηmηb_ch
(6)
Pw=(Pe-Pm)ηT=TreqωeηT
(7)
式中:b为发动机燃油消耗率;Pe,Pm,Pb和Pw分别为发动机功率、电机的机械功率、充入电池内的功率和用于驱动车辆的功率;ηm和ηb_ch为电机瞬时效率和电池的瞬时充电效率。
算法二[1]:系统输入不变,仍是发动机输出能量,但系统输出不再是充入电池能量和驱动车辆的能量,而是驱动车辆的能量的和,包括当前时刻由发动机驱动车辆的能量和之后利用先前行车充电时充入电池的电能,通过电机驱动车辆的能量,所以系统等效燃油消耗率的计算式为
(8)
其中Pw_f=Pmηm_aveηb_ch_aveηm_aveηb_disch_aveηT
(9)
式中:Pw_f为电机驱动车辆的功率;ηm_ave,ηb_ch_ave和ηb_disch_ave为电机平均效率、电池平均充电和放电效率。
2.3 系统等效燃油消耗率计算方法的改进
与算法一相比,算法二在于计算系统等效燃油消耗率时充入电池内的能量不再被看作系统输出的一部分,而是系统内能量流动的中间过程。因为采用行车充电的意义在于调节发动机工作点,使发动机这一时刻多消耗一定的燃油,通过电机产生电能存入电池,并在下一时刻利用那部分电能通过电机驱动车辆,以节省发动机驱动车辆的燃油消耗,所以计算系统等效燃油消耗时应采用式(8)的方法。但式(9)中的电机效率和电池充放电效率都是平均值,这会影响计算模型的精度,进而影响模式切换规则和转矩分配规则,所以如式(10)所示,在计算充入电池的功率时查取电机瞬时效率,计算电池的充电瞬时效率,而下一时刻电池内能量转化为机械能时电池放电功率和电机的转速无法确定,故电池放电效率和电机驱动效率采用平均值计算。
(10)
将上面阐述的改进计算方法简称为算法三,系统等效燃油消耗率的计算更为合理和精确。
3 系统效率最优控制规则对比
根据上述3种算法确定的转矩分配须通过优化程序计算。
f=minbsys
(11)
(12)
根据式(11)和式(12)优化目标函数和边界条件,可计算出3种算法的行车充电模式切换规则和该模式的转矩分配规则。
3.1 行车充电模式切换规则对比
行车充电模式的判定流程图如图4所示。结合系统等效燃油消耗率的计算公式和图4可以判定在某一发动机转速和需求转矩下,发动机采用哪种工作模式系统效率更高,如果行车充电系统更加高效,则所对应的方格标记为白色,否则为深灰色。图5~图7分别为3种算法确定的行车充电模式切换规则,图中白色区域上边界表示行车充电或发动机单独驱动判定条件。
对比发现图6模式切换规则曲线与发动机燃油消耗率等高线最为相近,这是由于式(11)中电机和电池的效率都为定值,这就使得算法二计算的系统等效燃油消耗率受发动机燃油消耗率b的影响。而且与图5和图7的规整边界相比,图6的边界较为散乱,这也是因为采用了平均效率,没有考虑到目标条件下发电功率很小,电机或电池无法达到假设的平均效率,所以做出了不合理的判断。图5采用算法一计算系统的等效燃油消耗率没有考虑电机驱动效率和电池放电效率,判定系统在需求转矩为300N·m时采用行车充电仍然高效,所以行车充电情况相比图6和图7更多。对于切换规则曲线的形状,其在1 200~1 600r/min与发动机燃油消耗率等高线较为相似,而低速和高速区域由于对应电机低效区,曲线呈下降趋势。图7中由于考虑电路径功率损失更多,判定需求转矩小于150N·m时行车充电更为高效。
3.2 行车充电模式转矩控制规则对比
混合动力系统的控制规则除了模式切换规则外,还包括转矩控制规则。对于行车充电模式下3种算法的转矩控制规则也有所不同,如图8~图10所示。
图8~图10为在不同发动机转速和需求转矩下基于3种算法确定的发动机控制曲线,而电机的转矩控制可以由需求转矩和发动机转矩计算,所以不再逐一分析阐述。图8与图10较为相似,发动机控制曲线接近水平,由于算法一确定的模式切换门限更高,所以其发动机转矩控制相对较高,控制在350N·m水平线上,而算法三则将发动机控制在200N·m水平线上。图9中发动机工作转矩曲线可以拟合为两条曲线,其中需求转矩小于50N·m工作在曲线1,需求转矩大于50N·m小于模式切换阈值时工作在曲线2,这是由于计算时电机和电池的功率假设为固定的平均效率,所以系统等效燃油消耗率最小曲线近似于发动机燃油消耗率最小曲线,即为曲线1。但实际控制中充电效率会随充电功率增大而减小,进而影响系统效率;而且发动机目标转矩过大,但其自身存在转矩响应慢的特性,这也将影响控制效果。为了对比3种算法的控制效果还需要进一步的仿真验证。
4 仿真对比分析与试验验证
在CRUISE和Simulink联合仿真平台搭建整车模型与控制模型,依据3种系统效率最优算法计算的控制规则,对控制模型中的行车充电模式切换条件及该模式下转矩控制分别进行修改,并进行仿真测试。
4.1 整车经济性对比
在中国城市综合工况下应用3种算法的整车经济性仿真结果如表1所示。

表1 整车经济性仿真对比
由表1可见:3次仿真结束后电池SOC值变化很小,所以折算电耗的误差对综合油耗造成的影响可以忽略不计,而本文中提出的系统效率最优改进算法(算法三)综合油耗最低,但相对另两种方法降低幅度不大,分别约为1.6%和1.4%。所以行车充电模式的优化在整个循环工况下对比并不明显,需要对各个模式的油耗电耗细化分析,对比各个算法中行车充电模式的节油贡献。
4.2 循环工况总成能耗与节油分析
为了进一步分析中国城市综合工况下行车充电的节约贡献,提取了工作模式、发动机功率、发动机燃油消耗率和电机功率等信号,进行统计计算,如表2所示。
表中电机电耗的正负值代表电机驱动消耗或是发电回收的电能,Edsoc的正负值是电池内部相对于初始状态减少或增多的电能;而电耗变化ΔE是3种算法相对于原策略总成能耗的变化,如果电机用于驱动ΔE为正说明电机消耗电能增加,电机用于发电ΔE为正说明电机发电所得能量减少,电池能量损失ΔE为正说明损失能量增加,而电池电耗ΔE为正说明相对于原策略中电池的末状态电能减少,反之亦然。

表2 动力总成在各模式下能耗统计
由表2可见:3种算法的再生制动回收能量基本相同,满足了整个循环工况中60%~85%的电能需求,为混合动力汽车主要节能途径,所以要排除再生制动能量对节能分析的影响,须通过对比电能和油耗变化量研究行车充电优化控制的节能效果。而行车充电模式节油的实现是通过在发动机低转速或者低负荷区提高负荷率驱动并发电,增加较少的油耗ΔQedg发电ΔEmdg储能,并在发动机其他低效工况电动行驶,增加电能消耗ΔEmev节约发动机参与驱动过程所需能耗,包括起动过程所需油耗ΔQest,离合器接合后由于发动机转矩不足触发联合驱动模式发动机油耗ΔQehy和电机能耗ΔEmhy,以及发动机正常驱动油耗ΔQeengd,所以各总成的电耗和油耗存在如下关系:
ΔEmdg+(-ΔEdsoc+ΔEmbrak)=
-(ΔEmev+ΔEbloss+ΔEmhy)
(13)
Qesav=ΔQedg+ΔQeengd+ΔQehy+ΔQest
(14)
式(13)中,等号右边的3项代表由系统电动工作时间增加而引起的能耗变化,3项的能量总和使各个模式下发动机油耗总和减少,即如果假设节油总量Qesav为收益,则ΔEmev+ΔEbloss+ΔEmhy就是获得这个收益的成本,而成本又由行车充电电耗变化ΔEmdg、联合制动电耗变化ΔEmbrak和电池电耗变化ΔEdsoc组成。
作为成本之一,由行车充电ΔEmdg而节约的油耗Qesavdg是判断哪种算法在行车充电中更加节油的依据,可通过计算ΔEmdg占电能供给增加总量的比例pmdg确定,如式(15)~式(18)所示。
pmdg=-ΔEmdg/(ΔEmev+ΔEbloss+ΔEmhy)
(15)
Qesavdg=Qesav·pmdg
(16)
ηsavdg=Qesavdg/ΔQedg
(17)
kf2edg=(-ΔEmdg)/ΔQedg
(18)
表3为3种算法的行车充电节油情况的对比分析。由表可见:算法三的行车充电节油贡献最多,相对于算法一和算法二分别提升13.25%和20.42%;而从油电转换比例kf2edg看,算法一和算法二发电过程更加高效,但是从其各自的控制规则可以看出,算法一行车充电的工况过多,储存大量电能用于电动行驶,必然存在一部分电能替代了发动机相对高效的工况,导致费油,综合电池充放电的能量损失,使综合节油Qesav最少,行车充电节油Qesavdg不如算法三;算法二控制规则是将发动机效率最低的工作点调节到近似于发动机最优工作曲线上,所以kf2edg最高;由于算法二的控制规则设定行车充电工况很少,所以可以利用少量电能电动行驶节省较多的发动机低效工作油耗,使这种算法的节油效率ηsavdg最高,但这也使行车充电能量供给所占比例pmdg只有54%,导致行车充电节油Qesavdg最少。
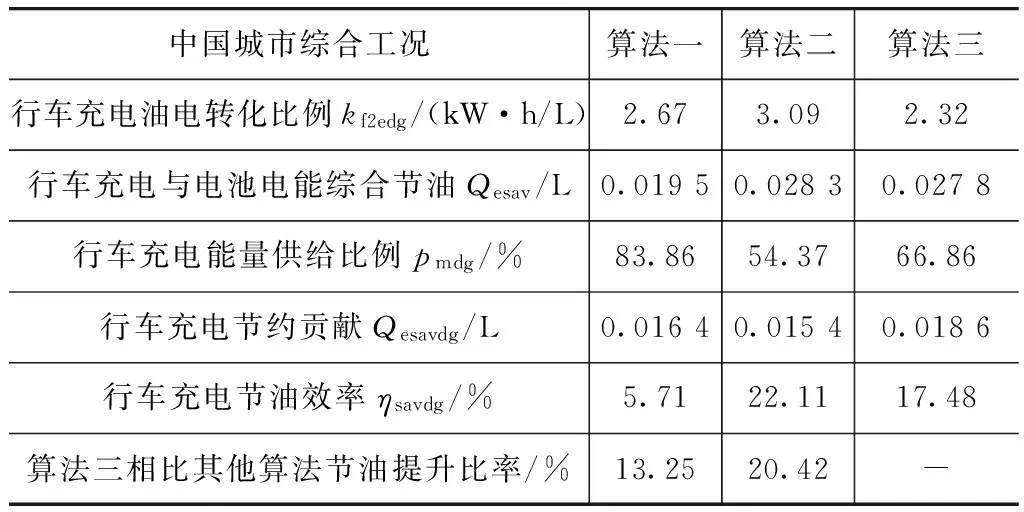
表3 3种算法行车发电节油情况对比
研究结果显示,基于系统效率最优改进算法的控制规则,整车经济性有所提高,而且相对于其他两种算法的行车充电节油贡献有13%~20%的提升,具有更好的节能效果。
4.3 硬件在环试验验证
为了验证系统效率最优改进算法的合理性和实时性,本文中采用硬件在环(HIL)试验方法将CRUISE仿真模型和整车控制策略模型分别下载至Dspace/Simulator处理器和TTC200控制器中模拟车辆动力传动系统和整车控制器及其通信网络,硬件在环系统构成如图11所示。
应用HIL系统在中国城市综合工况下对车辆模型和控制算法进行了测试,采集工况中发动机和电机等部分工作曲线如图12所示。
由图可见:在HIL试验中车速跟随情况较好,动力总成转速变化适当,说明换挡规律合理;由于换挡和离合器接合过程的转矩协调控制没有完善,发动机转矩在这些时刻有较大的变化;总体来看本文中采用的算法在实时试验中以多种模式实现了车辆驱动制动需求,满足了算法设计的合理性和实时性要求。
5 结论
为了保证目标构型ISG并联混合动力系统在行车充电过程中高效工作节约油耗,本文中对普遍应用的系统效率最优控制算法研究现状进行分析,结合两种系统效率最优控制算法的特点,提出系统效率最优改进算法。应用3种算法分别计算确定各自行车充电模式的切换规则和转矩控制规则,并对比分析了不同算法的控制差异,并在CRUISE和Simulink联合仿真平台建模仿真。仿真结果表明,本文中提出的系统效率最优改进算法在行车充电模式应用后进一步提高了整车经济性,对比其他两种算法,改进算法的行车充电节油贡献分别增加13%和20%,体现了算法的优化效果,而混合动力系统通过HIL试验验证了算法的合理性和实时性。确定并联ISG混合动力系统的控制规则为发动机需求转矩小于150N·m时进入行车充电模式,控制发动机工作在200N·m时进行驱动并发电。
[1] 杨亚娟,赵韩.基于效率最优的混联式混合动力驱动系统转矩分配研究[J].中国机械工程,2013,24(17):2408-2413.
[2] 秦大同,胡明辉.CVT轻度混合动力系统电动机和发动机联合工作模式下的系统效率优化[J].机械工程学报,2008,44(11):171-177.
[3] 任勇,郑永霞.基于系统效率最优的CVT混合动力轿车转矩优化分配方法[J].汽车使用技术,2012(7):1-6.
[4] 连静,韩虎.基于传动系统效率最优的混合动力汽车控制策略研究[J].大连理工大学学报,2013,53(5):666-670.
[5] 舒红,刘文杰,袁景敏,等.混联型混合动力汽车能量管理策略优化[J].农业机械学报,2009,40(3):31-36.
[6] 孙四军.基于混合动力系统效率的发动机工作点的控制[J].汽车工程,2012,34(3):207-210.
[7] 彭志远,秦大同,等.基于系统效率最优的新型混合动力汽车控制策略[J].沈阳工业大学学报,2012(4).
[8] 余志生.汽车理论[M].北京:机械工业出版社,2006:2-38.
[9] 王庆年,王文.基于瞬时效率的功率分流式混合动力汽车最佳分离因子的确定[J].吉林大学学报(工学版),2013,43(5):1160-1164.
[10] 王庆年,李峰.基于发动机高频使用区的混合动力汽车发动机优选方法[J].吉林大学学报(工学版),2014,44(1):1-4.
A Study on the Control Rule for Driving Charging in a Parallel Hybrid Electric Bus
Ba Te, Gao Yinhan, Wang Qingnian & Zeng Xiaohua
JilinUniversity,StateKeyLaboratoryofAutomotiveSimulationandControl,Changchun130025
With a parallel ISG hybrid electric bus as object, two existing optimal control algorithms for system efficiency are compared, and a revised algorithm is proposed. Based on these three algorithms the corresponding driving charging mode switching rules and torque distribution rules are determined respectively with comparative simulation and hardware-in-the-loop verification test conducted. The results indicate that the proposed driving charging control rule for optimal system efficiency further enhances vehicle energy economy. With the rule, when engine works in low-efficiency condition, driving charging performs with reasonable electricity generation in a relatively high efficient way. As a result, the secondary conversion of a large amount of energy is avoided, while the energy saving is achieved through replacing the low-efficient work of engine by motor drive. The energy economy of vehicle with the proposed control rule is 13% and 20% higher than that with two other control rules, verifying the rationality of the proposed control rule and providing references for the research and application of optimal control algorithm for system efficiency.
hybrid electric bus; equivalent specific fuel consumption; system efficiency; control rules; torque distribution
*国家863计划项目(2011AA11A210)资助。
原稿收到日期为2014年10月27日,修改稿收到日期为2015年2月6日。
猜你喜欢
车用发动机(2022年3期)2022-06-24
防爆电机(2022年2期)2022-04-26
昆明医科大学学报(2021年12期)2021-12-30
防爆电机(2021年5期)2021-11-04
大众投资指南(2021年35期)2021-02-16
江苏广播电视报·少儿文学(2019年10期)2019-09-10
汽车与新动力(2019年2期)2019-05-14
汽车电器(2018年1期)2018-06-05
电机与控制学报(2018年9期)2018-05-14
汽车与安全(2017年11期)2017-12-15