
电子接插件在线质量检测研究
2015-04-13 09:31邹龙飞韩震宇马鹏兰云
计测技术 2015年2期
邹龙飞,韩震宇,马鹏,兰云
(四川大学制造科学与工程学院,四川成都610065)
0 引言
近年来,随着电子信息产业的快速发展,印制电路板上电路集成化程度不断提高,人们越发意识到接插件的重要性,对接插件的质量要求也越来越高。为适应电子信息行业的发展要求,接插件朝着体积和外形尺寸微小化、形状复杂化、高精度方向发展,这对接插件的质量提出了更高的要求。
接插件在使用过程中的主要故障是接触不良,这除了与接插件的所选用材料和设计不合理有关外,接插件在制造过程中的外观质量缺陷也是一个重要的因素。电子接插件的生产制造属于典型的流水线作业,虽然其品种繁多,形状各样,但制造过程是基本一致的,大致可以分为冲压、电镀、料塑和装配四个阶段[1]。电子接插件的制造从冲压开始,在此工艺中,当金属料带通过高速冲压机床时,由于一些接插件元件在冲压过程中存在阻滞和定位误差,会导致产品产生扭曲变形、划痕和粘连金属碎屑等冲压缺陷,同时如果金属料带出现偏斜或拱起时,会使得产品的尺寸不符合设计要求,这些外观质量缺陷都会影响接插件的接触电阻,进而影响电信号的传递。因此,为了保证接插件的产品质量,就必须对接插件的外观质量进行检测。另一方面,大多数国外冲压机床都能以高速(800 ~1600 r/min)的冲压速度运转,而且由于每个冲程都能冲压出多个接插件产品,因此电子接插件的冲压生产效率是非常高的(通常能达到1500 ~2000 件/min)。因此,为避免整卷金属带在如此高的生产速度下报废,准确并及时地检测出冲压质量缺陷就显得十分重要。为了及时发现产品缺陷,冲压工艺后立即进行100%的在线质量检测就显得十分必要。
对于高速的接插件制造生产过程来说,检测系统的检测效率和性能稳定性是最重要的两个指标。然而,目前国内大部分接插件制造企业的产品在生产制造过程中各道工序的质量检测通常由人眼并采用手动完成,这种检测方式不仅工作量大,而且人员自身的主观因素对检测结果有着绝对性的影响,因此也就不能够确保检测的效率和精度[2]。随着集约型社会化大生产的不断提高,采用人工在生产流水线上进行视觉检测的方法越来越难以满足大批量、高速化生产的要求。基于机器视觉技术并采用图像处理技术代替人眼检测的方案,为上述问题提供了新的解决方案。机器视觉检测技术具有非接触、高效率、低成本、在线(100%)、智能化等诸多优势,并且极为适合于大批量、高速制造生产过程的产品质量检测。采用合理的机器视觉检测方案能够实现生产效率和自动化程度的大幅度提高,并且更有利于实现生产线上的数字化集成和数字化信息管理,因此,本文借鉴国外企业在质量检测方面的先进经验,研究和开发了基于机器视觉的电子接插件外观质量检测系统,对接插件产品进行100%实时检测,充分保障接插件的外观质量,对企业具有重要的实际意义,拥有巨大的市场价值和应用前景。造区,作为接插件的主要构成部分,金属端子的形状、尺寸影响着后续的工艺及成品的质量。因此,在冲压工程中必须对金属端子的关键尺寸和表面缺陷等外观质量进行在线检测,以保证金属端子的品质,减少不良品的数量,并且对检测数据进行统计分析,以便及时发现生产中的问题,进行维护保养。对冲压后的接插件进行视觉检测是减少损失的关键环节。
接插件的外观质量缺陷通常具有复杂性和多样性的特点,目前接插件的外观质量还没有统一的标准。本文根据某大型接插件生产厂商提供的缺陷情况,归纳得出所检测接插件的外观质量缺陷主要是影响其功用的引脚缺陷、鱼眼缺陷和表面缺陷。
1.2.1 检测项目
1)引脚尺寸
在冲压过程中,由于长时间工作后模具出现磨损,或者金属料带出现偏斜、拱起,会使冲压后的接插件出现引脚偏细或偏粗。如图1 椭圆圈中表示的部分,引脚长度过短,尺寸不合格。
1 检测系统介绍
机器视觉检测系统不仅仅是视觉,它与机械结构、运动控制、硬件系统和软件系统紧密联系,不可分割。稳定的机械结构定位、快速精确的送料系统、可靠的硬件系统和友好灵活的软件系统都是一个成功的视觉检测系统设计所必须考虑的因素[3]。
1.1 系统原理
本系统根据机器视觉检测技术原理来进行设计和选型。由机器视觉系统原理的论述,我们可知系统原理是对从真实世界采集到图像信息使用一系列的软件算法进行处理分析,提取我们所需要的特征信息和计算结果,计算机将根据我们所设定的标准对结果进行判定,再根据检测结果反馈对控制执行机构进行操作的控制过程[4]。
1.2 检测项目与要求
目前,机器视觉在电子接插件整个制造流程中都有一定的应用,只是根据工艺特点和要求的不同,其所扮演的角色各有不同。冲压是接插件金属端子的制

图1 引脚尺寸不合格
2)引脚间距
由于金属料带与冲压模具之间的水平相对运动存在移位、阻滞等现象,同时金属料带在传送过程中与料槽存在碰撞或摩擦,容易使冲压后的接插件出现引脚歪斜扭曲,这种缺陷在引脚较长的接插件中很容易出现。如图2 椭圆圈中所示引脚发生歪斜使得引脚间距偏大或偏小,引脚间距不合格。

图2 引脚间距不合格
3)鱼眼缺陷
冲压过程中,由于模具与金属料带的垂直运动距离不足,导致鱼眼没有或者没有被压穿。如图3 椭圆圈中所示,为鱼眼缺陷。

图3 鱼眼缺陷
4)表面缺陷
接插件与料槽间存在碰撞和摩擦现象,会使接插件表面产生细长状的划痕,如图4 椭圆圈中所示。冲压过程中,料带上的金属跳屑容易引起接插件表面压伤,如图5 椭圆圈中所示。压伤比划痕粗,一般呈不规则凹陷状。冲压模具与金属料带的垂直相对运动存在移位、阻滞,易引起毛刺、飞边缺陷,如图6 椭圆圈中所示。飞边比毛刺要粗一些。

图4 表面划痕缺陷

图5 表面压伤缺陷

图6 飞边缺陷
1.2.2 检测要求
充分考虑接插件生产厂家对产品外观质量的要求后,本系统所制定的检测标准如下:
1)检测对象:待检物体为双排接插件,正反面均需检测,如图7所示;
2)检测内容:上面所描述的各种缺陷;
3)检测速度:检测周期<200 ms;
4)检测误差:±0.05 mm;
5)检测正确率:>96%。

图7 待检接插件实物图
1.3 系统组成及其工作流程
根据机器视觉检测系统的原理和本系统的功能要求,可知本系统主要由料带传送部分、图像采集部分、图像处理部分、单片机控制部分组成,其整体结构如图8所示。

图8 系统整体结构图
机器视觉检测系统的主要工作流程是:首先,计算机接收来自相机或图像采集卡的图像信息;然后根据检测系统的功能要求,对获取的图像进行相应的分析处理,完成检测任务;最后输出检测结果。本文的主要任务是设计一种针对接插件外观质量的视觉检测系统,其总体工作流程如图9所示。

图9 系统总体流程示意图
2 核心图像处理模块
2.1 定位孔检测
由于受到各种机械和电子干扰或迟滞的影响,在视觉系统每次所采集的图像上,待测物体的位置都会有变化,因此在进行产品质量检测之前,系统必须首先在视野范围内确定目标被测物的位置,并且所采用的算法能够自适应被测物体在图像中的位置变动。
接插件的冲压工艺为:冲定位孔→分离→冲外形→宽边弯曲Z 形弯曲,定位孔是接插件冲压中必不可少的重要部分,并且重复定位精度高,接插件其它部分的位置都是以定位孔为参考基准的,因此本系统选用接插件图像上的定位孔作为待检接插件位置信息的基准,并以此实现其它检测模块的定位[5]。一般情况下,本检测系统的滑槽限位夹具机构加上高精度的伺服运动控制能够保证被测接插件在图像中的位置变化不会太大,这提高了系统利用定位孔实现目标图像位置信息获取的稳定性。倘若出现个别被测接插件的定位孔无法获取,不能确定目标图像的位置信息,通常可以认为检测系统的传动系统出现了严重的问题或者是冲压机床出现了生产故障。
接插件的定位孔为圆孔,目前普遍采用的方法是:首先进行边缘检测,然后采用圆拟合方法,找到圆心和直径,具体检测流程如图10所示。

图10 定位孔检测算法流程
2.2 鱼眼检测
鱼眼检测需要完成对接插件产品中鱼眼大小和数量的检测,对鱼眼的尺寸参数精度要求不高,因此本系统采用快速的Blob 分析算法完成对鱼眼的质量检测。鱼眼检测的具体流程是:首先通过系统所获取的定位孔位置信息和接插件产品参数确定鱼眼ROI 的位置,然后在鱼眼ROI 内进行图像二值化,再进行Blob 分析获取鱼眼的面积、长轴和短轴等参数,最后根据系统设置的容许值进行结果判断,如图11所示。
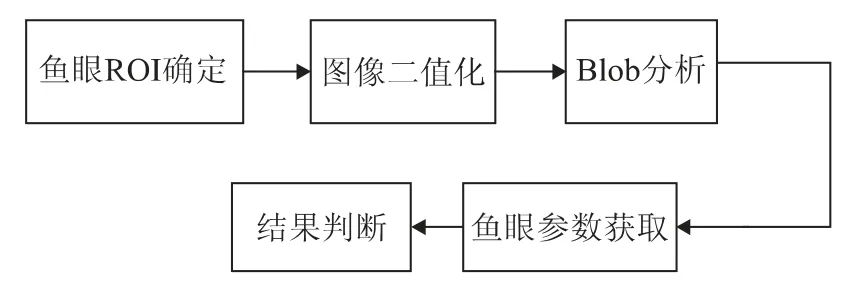
图11 鱼眼检测算法流程
2.3 引脚检测
引脚是接插件产品的关键部分,需要完成对其尺寸的测量。本系统采用边缘检测算法实现对引脚长度、宽度、倾斜度以及引脚间距的测量。引脚检测的具体流程为:首先通过系统所获取的定位孔位置信息和接插件产品参数确定引脚ROI 的位置,然后在引脚ROI内进行边缘检测获取引脚的尺寸参数,最后根据系统设置的容许值进行结果判断,如图12所示。

图12 引脚检测算法流程
2.4 表面缺陷检测
表面缺陷检测部分的核心是在接插件的目标表面图像中寻找存在的缺陷,并定位和判断。接插件产品的表面缺陷主要是划痕和压伤,需要检测的部分涉及整个表面,待检面积较大,同时产品的形状复杂,这就要求表面缺陷检测算法必须注重时间性能[6]。
表面缺陷检测算法多种多样,其经典算法有图像差影法、缺陷图像的特征提取与选择和形态学处理等。为了适应接插件的高速在线检测,本系统根据接插件产品自身特点,将形态学和差影法相结合,对传统的差影算法进行了改进,以提高系统的稳定性。表面缺陷检测的具体流程是:首先确定表面检测ROI 设置标准模板,然后采用改进的差影算法进行表面缺陷定位,再采用Blob 分析确定表面缺陷的参数获取,最后根据系统设置的容许值进行结果判断,如图13所示。

图13 表面缺陷检测算法流程
3 实验结果及分析
3.1 系统运行速度结果及分析
通过多线程技术,并且采用多核计算机,本机器视觉检测系统实现了四幅图像采集和处理的并行操作,因此系统的运行时间取决于四个检测部分最慢的一个。理论图像采集传输时间是由图像大小和采用的图像传输方式以及硬件决定(硬件引起的差异一般很小)。本系统的图像大小为656×492(8 位像素深度),采用IEEE 1394b 火线传输协议(理论支持100 MB/s 数据传输);本系统采用的相机数据传输速度可以达到62.5 MB/s,所以理论图像传输时间为656×492/62.5=5.2 ms;又由于一张1394 卡插的是两个相机,相当于两个相机共用一条总线,时间要乘以2,即是10.4 ms,再加上少量的曝光时间,所以理论上一个相机的图像采集传输时间是大于10.4 ms 的。图像处理时间没有一个理论的计算,因为程序部分较为复杂,所以采用实际运行测量来估算。
表1 为本系统运行10 次的图像采集和处理的时间,表1 中的所有数据是对12-PIN 接插件的检测结果。

表1 系统图像采集和处理运行时间 ms
从表1 中可得,本系统进行图像采集和处理所用的平均时间为21.439 ms。
本系统中的料带的运动控制规划为梯形加减速曲线,如图14所示。伺服电机采用快速点位运动控制方式,即电机按照设定的梯形速度运动指定的距离,在到达目标位置时自动停止。系统通过安装在电机输出轴上高精度的旋转编码器来判断运动是否完成,但是如果以此信号软件触发相机拍照,会使图像产生较大的“拖影”,图像整体模糊,主要原因是上位控制卡发脉冲的速度要高于伺服电机的动态响应速度,即存在脉冲滞后性(脉冲已经发完并反馈给上位机,但是实际电机还在执行,即是料带还在运动)。因此,为了得到清晰的图像,本系统在上位运动控制卡脉冲发送结束后,再延时100 ms,以确保电机执行动作全部完成并且料带可靠地停止。料带一个周期的长度是23.5 mm,卡料齿轮盘的直径是105 mm,电机脉冲当量角为0.125°,则运行一个周期所需脉冲为23.5× 360/(105π×0.125)=200。规划电机加速度为30000 脉冲/s2,目标速度为6000 脉冲/s,则可以计算出t1=t2=20 ms,t3=13.3 ms。理论运动时间t=t1+t2+t3=53.3 ms。所以总的理论时间(加上延时)就为100 ms +53.3 ms=153.3 ms。
通过合理调整驱动器的相关参数,现场中料带运动一个周期的实测平均总时间为155 ms。

图14 梯形速度曲线图
本系统完成一次检测所用的总时间为:21.439 ms+155 ms=176.439 ms <200 ms,完全满足系统的实时性指标。
3.2 系统检测精度及分析
系统的检测精度主要是针对引脚的长度、宽度及间距而言的,影响因素有相机的像素当量和图像的处理算法。相机像素为656×492,图像视野大小为30.8 mm×23 mm(不同的相机由于相机高度和焦距调整的细微差距可能存在较小的波动)。此个测试相机通过标定计算,像素当量为0.047 mm。本系统采用的算法中,定位孔的检测基于边缘检测是亚像素精度算法,鱼眼检测算法和表面缺陷算法基于BLOB 分析是像素精度,尺寸检测算法基于边缘检测是亚像素精度,所以整个系统的图像算法精度是控制在正负一个像素当量的范围之内的。在本文中,所检测的接插件尺寸规格如表2所示。

表2 接插件产品引脚规格尺寸
本系统的引脚尺寸测试结果,如表3所示。

表3 系统引脚尺寸测试结果表
其中引脚6 为特殊引脚,在计算引脚长度平均值时将其排除;引脚12 没有间距值,即12 个引脚只有11 个间距。
通过对比上述的数据可知,引脚尺寸测量误差小于±0.05 mm,验证了尺寸测量算法的准确性,满足系统的检测精度指标要求。由于企业应用成本的控制,本系统采用的是较低分辨力的相机,所以精度还没能达到超高精度检测。本系统如果采用更高分辨力的相机,是能够达到更高精度检测的。
3.3 系统可靠性分析
机器视觉检测系统属于新一代的检测工具,在与传统生产线集成的过程中必然会遇到很到实际问题,如果不能妥善地解决这些问题,将会引起系统的误报。本系统中,降低系统稳定性与可靠性的因素主要有以下几点:
1)残留在产品表面上的润滑油容易引起系统误报。金属料带在通过冲压过程中需要足够的润滑油,而一些润滑油也经常会粘附在冲压后的产品表面上。这些残留的润滑油被视觉检测系统误检测为划痕或是压伤缺陷,降低系统的可靠性。通过在产品进入检测系统之前安装一副气流吹洗装置以清除零件上残留的润滑油,从而降低系统的误报率。
2)环境光源、设备振动、电磁干扰、供电电源的稳定性等外部条件。特别注意的是短行程的变速运动容易引起电机振动,造成电机停不住,致使系统采集的图像质量部稳定,因此要合理规划电机的运动曲线,保证料带在相机曝光时间内所移动的微小位移不超过一个像素尺寸所对应的物理尺寸。
4 结论
根据接插件生产厂商所提出的产品外观质量检测要求,综合机器视觉检测系统的原理和特点,本文成功地将机器视觉检测技术应用到接插件外观质量检测领域,研究并开发了基于机器视觉的接插件外观质量检测系统,实现了对接插件各种冲压缺陷(包括尺寸参数和表面缺陷)的在线检测,并且达到了厂家测量误差小于±0.05 mm、检测周期小于200 ms 的检测要求,提高了接插件检测的自动化程度。检测系统软件以Visual C + +6.0 为开发平台,基于第三方图像处理软件开发包进行二次开发,采用面向对象的设计方法和多线程编程技术,降低了系统的开发难度,系统的可读性、可操作性、可扩展性和可维护性较好,同时系统的界面友好,操作简单,符合现场操作人员的使用习惯。
[1]Carsten Steger,Markus Ulrich,Christian Wiediman.机器视觉算法与应用(双语版)[M].杨少荣,译.北京:清华大学出版社,2008.
[2]路勤密诗基.电子连接器自动检测白皮书[J].现代制造,2004(22):19-21.
[3]金隼,洪海涛.机器视觉检测在电子接插件制造工业中的应用[J].仪表技术与传感器,2000(2):13-16.
[4]赵鹏.机器视觉理论及应用[M].北京:电子工业出版社,2011.
[5]周建.基于机器视觉的半导体三极管外观质量的检测[D].成都:四川大学,2011.
[6]李峰峰.电子元器件的外观检测系统的研究与开发[D].广州:华南理工大学,2012.
猜你喜欢
北京航空航天大学学报(2022年8期)2022-08-31
China’s foreign Trade(2021年6期)2021-12-26
摄影之友(影像视觉)(2018年6期)2018-07-06
制造技术与机床(2017年10期)2017-11-28
汽车与新动力(2017年3期)2017-06-29
饮食与健康·下旬刊(2017年1期)2017-02-08
中华奇石(2015年5期)2015-07-09
世界制造技术与装备市场(2015年6期)2015-02-28
电子设计工程(2014年18期)2014-02-27
科技传播(2013年22期)2013-10-17
