岛礁地形下半潜平台水动力性能研究
2015-04-25 10:11程小明刘小龙中国船舶科学研究中心江苏无锡214082
船舶力学 2015年7期
吴 波,程小明,田 超,丁 军,刘小龙(中国船舶科学研究中心,江苏 无锡 214082)
岛礁地形下半潜平台水动力性能研究
吴 波,程小明,田 超,丁 军,刘小龙
(中国船舶科学研究中心,江苏 无锡 214082)
文章基于一岛礁实地的地形数据,针对该地形下的半潜式平台进行了水动力及运动响应分析,重点研究了岛礁地形对平台运动响应的影响,并结合模型试验结果进行了对比分析。结果表明应用目前常用的以线性波浪理论为基础的数值方法,通过引入对地形与平台之间的绕射与辐射水动力的干扰计算,可以对岛礁地形下的半潜平台进行水动力和运动分析。研究所得到的岛礁条件下的平台运动响应结果与模型试验值对比较为吻合。
岛礁地形;半潜平台;水动力性能;数值分析
0 引 言
海洋中蕴含有丰富的油气资源和渔业资源,开发和利用海洋包括岛礁的资源已经成为经济与技术发展的一个重要趋势。岛礁周边环绕着宽度数百米至数千米水深较浅的礁盘,这些礁盘不仅具有丰富的渔业和旅游资源,而且发挥着消波护岛、防止海水侵蚀岛体本身的重要作用。应用浮式平台作为近岛礁的浮动基地,在不影响岛礁生态环境、礁盘和海岛陆地形态的同时,可以为海洋及岛礁的建设与资源开发提供后勤基地。岛礁半潜式平台布放于近岛礁海域,通过栈桥与岛礁相连,作为岛礁的生产和建设基地,平台具有人员作业生活、船舶停靠、物资装卸等功能;采用浮式平台结构,具有部署快速、使用灵活的特点。图1所示为岛礁与岛礁半潜式平台的示意图。

图1 近岛礁半潜平台Fig.1 Semi-submersible platform near a reef island
对于海洋平台水动力性能的分析,国内外在该领域开展了大量的工作。王世圣[1]针对深水半潜平台,建立半潜式钻井平台的三维水动力模型,采用势流理论和Morison公式相结合的方法,应用SEASAM进行计算分析,得到半潜平台运动响应的传递函数和固有周期。朱航[2]针对风浪作用下的HYSY-981半潜式平台,开展时域的数值模拟分析,得到平台的运动响应结果。张威[3]对1 500 m的深海半潜式平台进行研究,通过频域计算得到平台的运动响应,并基于模型试验结果进行对比分析。肖宇维[4]应用AQWA研究了三种型式的张力腿平台在规则波下六自由度运动的响应幅值算子,并对比分析了水动力性能的特点。姚彦龙[5]针对三角形张力腿平台开展频域水动力分析,得到该平台的运动响应、波浪激励力,并在此基础上对平台的性能进行评估,对布局进行优化。蒙占彬[6]基于1 500 m水深的环境条件,对传统式、延伸式和海星式三种型式的张力腿平台的运动响应及波浪长期预报响应幅值进行了对比,分析各自的水动力性能及优缺点。龙筱晔[7]采用时域耦合分析方法,研究了Truss Spar平台的耦合动力特性问题,分析平台的运动响应。Mansour[8]对新型半潜平台开展数值计算分析,对比常规型的半潜平台的RAO值进行研究。Clauss[9]针对GVA4000半潜平台进行数值计算,所得到的波浪诱导运动数值结果与试验结果对比吻合良好。Lowa[10]在时域和频域中对浮式平台进行分析,研究平台的一阶和二阶运动。国内外的研究对象大多针对深水条件下的海洋平台,在浅水及近岛礁条件下的平台水动力分析方面则极少见到相关的文章。
本文针对岛礁地形下半潜平台的水动力性能进行研究分析,应用AQWA软件对有岛礁及无岛礁两种情况开展数值计算,岛礁地形对平台水动力及运动响应的影响通过将岛礁模拟成固定物体的湿表面加以考虑。通过对比数值计算结果与模型试验数据,研究了近岛礁条件对平台水动力及运动性能的影响,可为近岛礁条件下平台的性能研究和系泊系统的设计提供分析基础。
1 基本理论
数值分析的基本理论基于线性理论,在频域内进行计算,考虑岛礁地形下的半潜平台运动响应分析,总的速度势可以表示为[11]:

1.1 入射问题
在数值计算中,对于设定水深的波浪入射势可以表示为:

式中:d为水深,k为波数,θ为浪向,应用AQWA的频域数值分析基于波幅A为1 m的规则波。基于线性化后的伯努利方程,可以得到平台表面的压力分布,再通过积分得到平台的入射波浪力(Froude-Krylov力):


1.2 绕射问题
在数值计算中,对于岛礁地形下平台的绕射问题,绕射势的控制方程及边界条件表示为:
△φD=0 在流域内
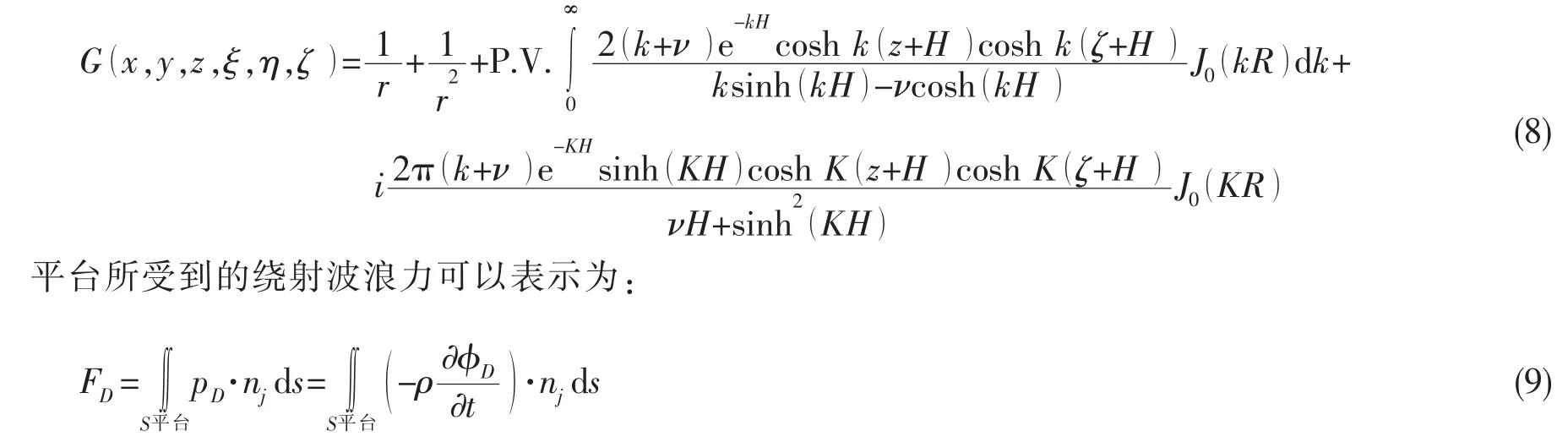
式中:物面的边界条件如(6)式所示,入射势φI已知,绕射势φD可以表示为如(7)式所示:

式中:G为格林函数:
1.3 辐射问题
岛礁地形下平台的辐射问题的数值计算,辐射势的控制方程及边界条件表示如下:
△φR=0 在流域内
式中:物面的边界条件在固定的地形表面法向速度为0,在平台表面则等于平台的运动速度,辐射势φR可以表示为:

平台所受到的辐射波浪力可以表示为:

2 数值计算模型
2.1 半潜平台参数
本文研究的近岛礁平台为半潜形式,由上部甲板、中间立柱、下部浮筒与横撑组成,平台示意图见图2,平台的主尺度参数见表1。

表1 半潜平台主尺度Tab.1 Main dimensions of the semi-submersible platform
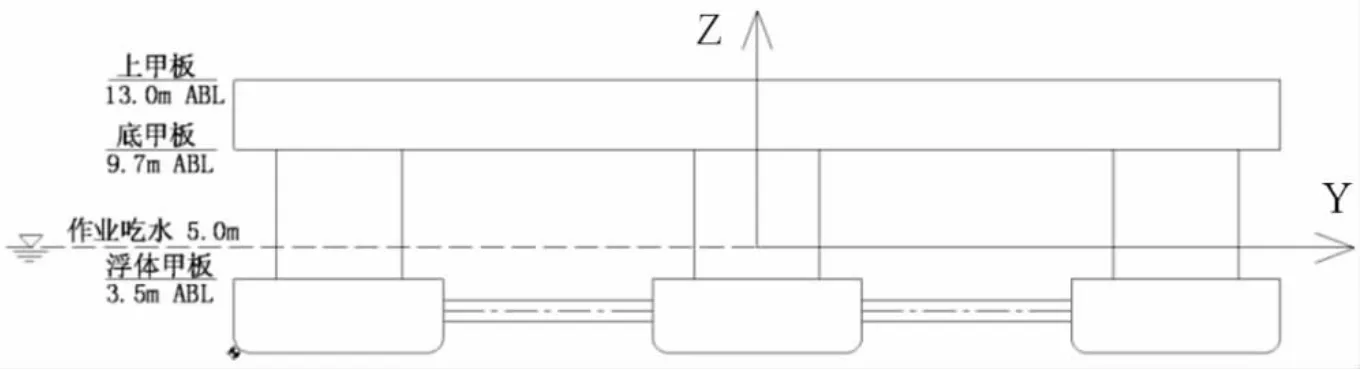
图2 半潜平台Fig.2 Semi-submersible platform
2.2 岛礁地形模型
地形模型基于岛礁实地地形的测量数据,考虑到模型单元数及计算时间的局限,在水动力计算中地形的形状为200 m(沿平台宽度方向)×150 m(沿平台长度方向)的长方形,完全浸没于水面以下。地形周边的海底深度为35 m,而地形高度则随不同的水平位置而变化,在平台中心位置处的水深为10 m。

图3 岛礁地形下半潜平台AQWA数值分析模型Fig.3 AQWA model of the semi-submersible platform near a reef island
在近岛礁海域,由于波浪传播速度随水深变浅而减小,来自不同方向的波浪沿着礁盘浪花区传播后的方向会逐渐趋于垂直于岛礁的坡岸,因此研究沿此方向传播的波浪对平台运动的影响具有重要的意义。图4为岛礁地形下平台的坐标以及运动方向定义,与模型试验研究的入射波浪和平台运动的方向定义相一致,波浪沿着X方向入射,平台的纵荡沿着Y方向,横荡沿着X方向,由此按照右手系法确定平台相应的六自由度运动方向。
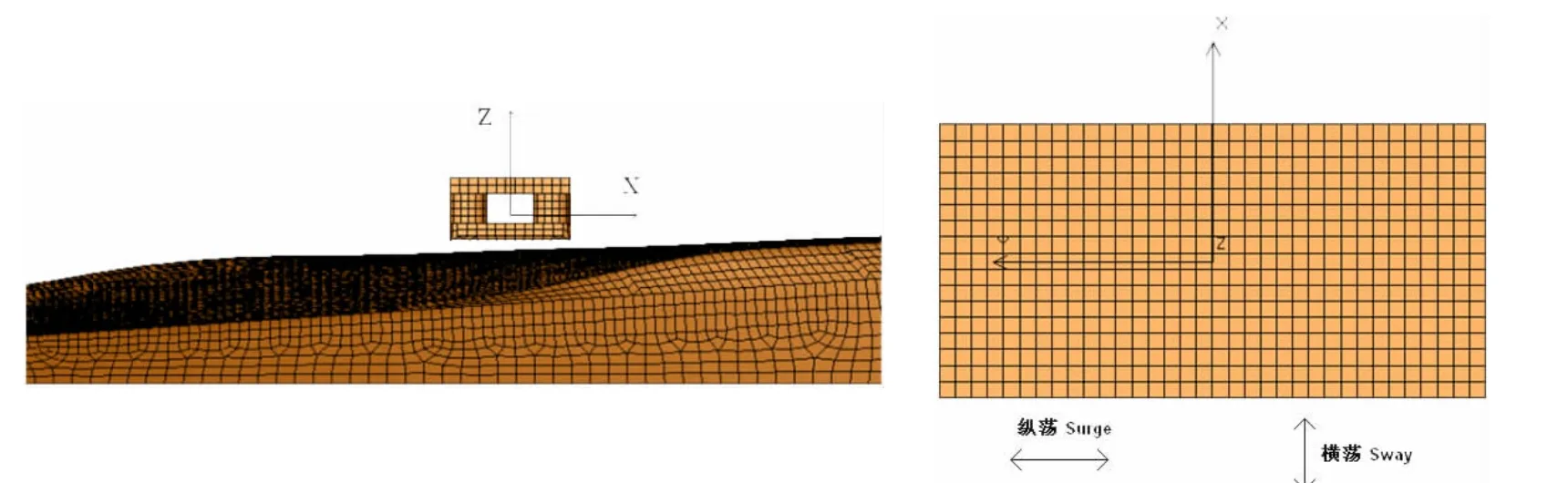
图4 岛礁地形下半潜平台坐标与运动方向定义Fig.4 Coordinates and motion directions definition of the semi-submersible platform near a reef island
数值计算在频域中模拟1 m波幅的规则波,浪向为0°沿着X方向。作为对比,无岛礁地形下的平台计算水深为10 m,而考虑岛礁地形的入射波水深为35 m,在平台布放处的水深为10 m,相关的数值计算条件参见表2。

表2 数值计算条件Tab.2 Numerical calculation condition
3 水动力性能分析
3.1 岛礁地形对平台响应影响分析
图5~10所示为有岛礁地形和无岛礁地形时半潜平台运动响应的对比结果。图中基于圆点的拟合曲线所示为无岛礁地形条件下单个平台的运动响应RAO数值规律[12],基于三角形点的拟合曲线所示为岛礁地形下平台的运动响应RAO数值规律。横坐标为波浪周期,纵荡(Surge)、横荡(Sway)和垂荡(Heave)的RAO分别为1 m波幅下平台在该方向的位移,而横摇(Roll)、纵摇(Pitch)和艏摇(Yaw)的RAO分别表示1 m波幅下平台在该方向的转动角度。
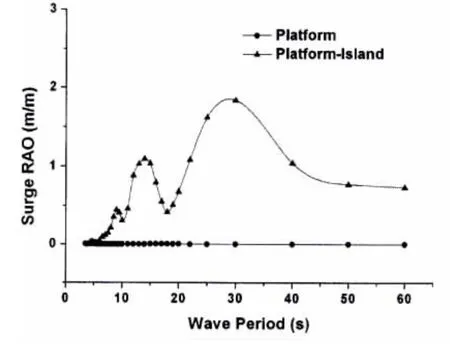
图5 平台纵荡运动响应RAOFig.5 Surge RAO of the platform
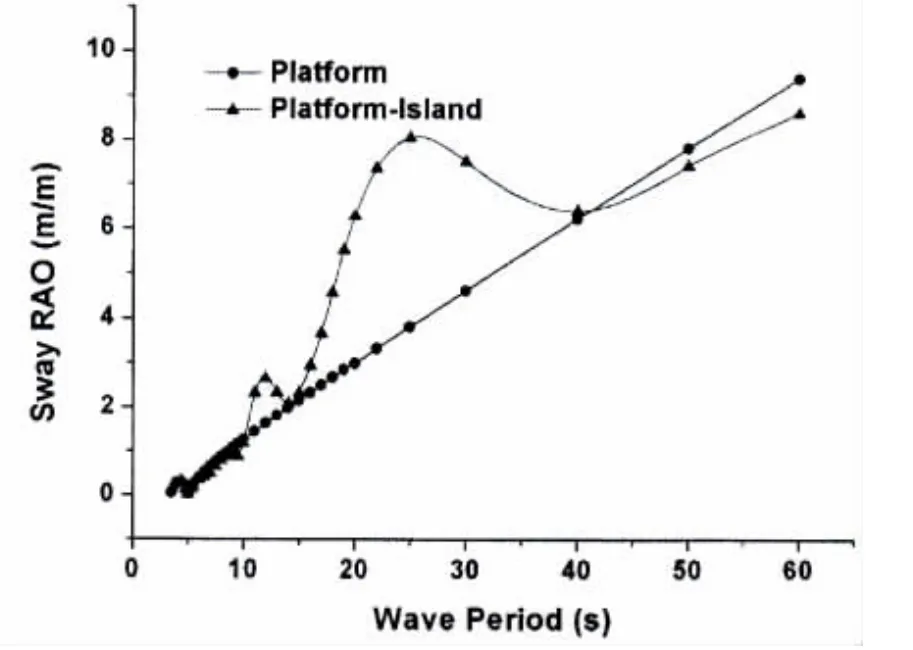
图6 平台横荡运动响应RAOFig.6 Sway RAO of the platform
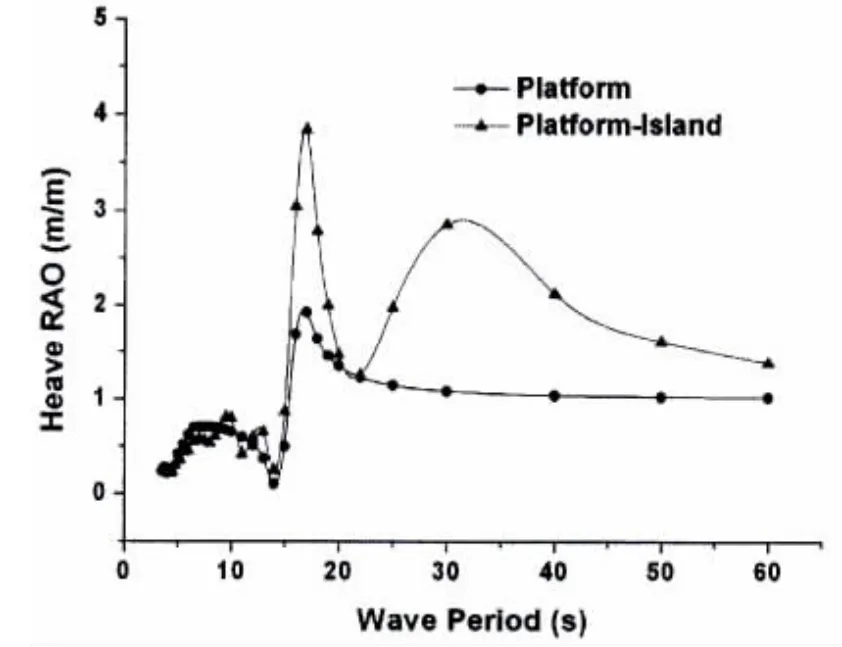
图7 平台垂荡运动响应RAOFig.7 Heave RAO of the platform
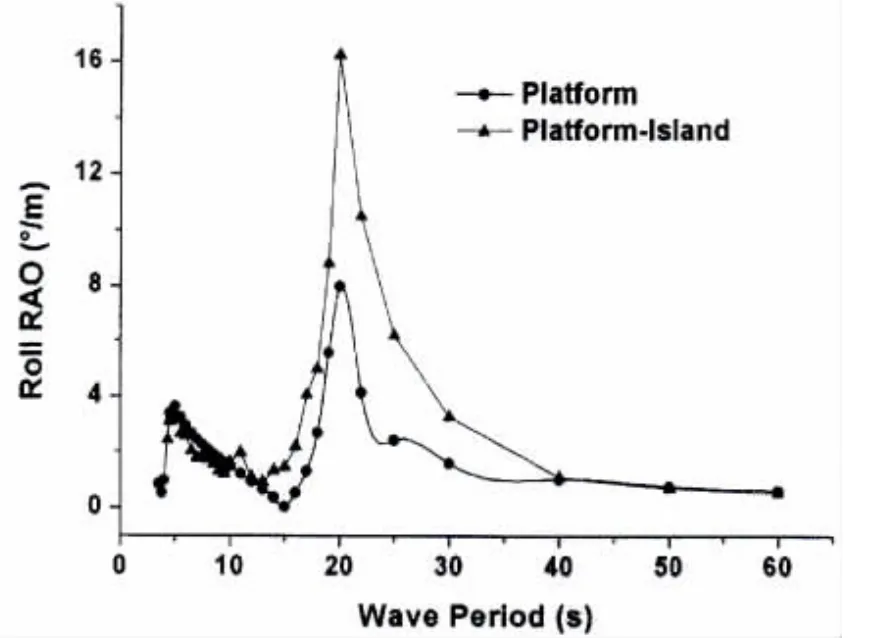
图8 平台横摇运动响应RAOFig.8 Roll RAO of the platform
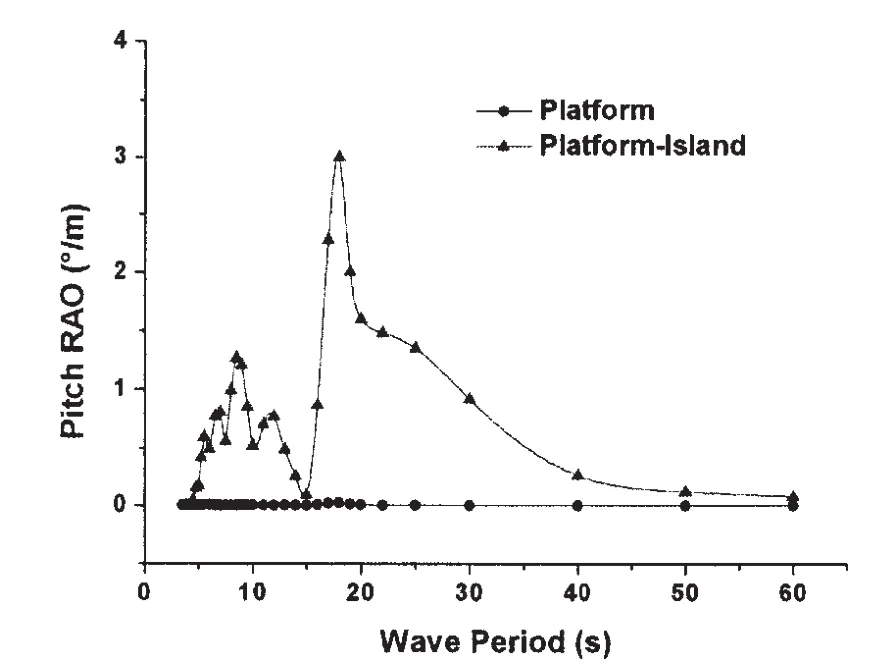
图9 平台纵摇运动响应RAOFig.9 Pitch RAO of the platfor
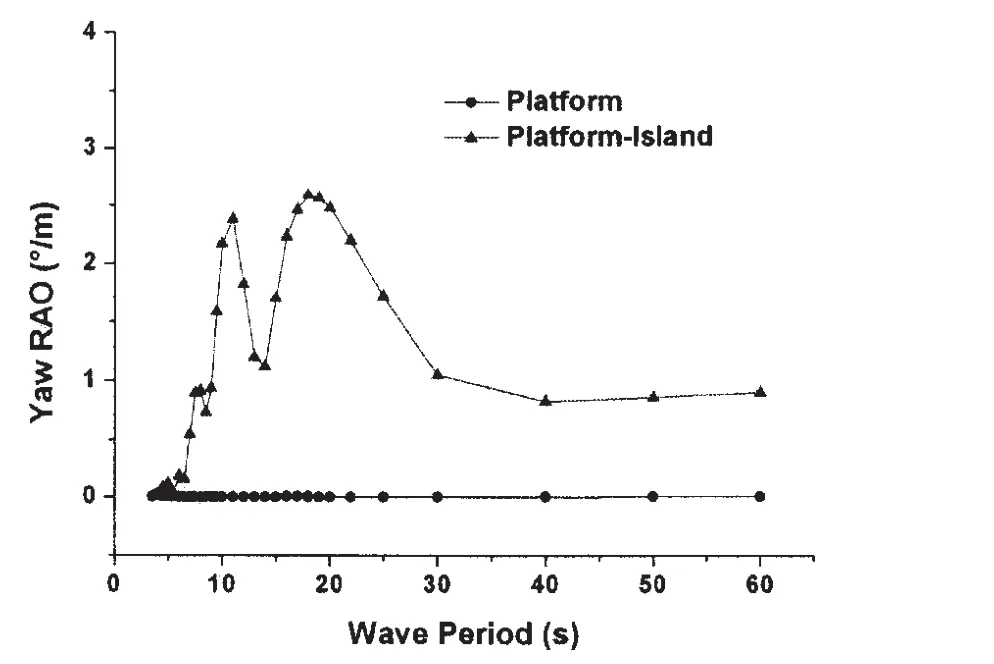
图10 平台艏摇运动响应RAOFig.10 Yaw RAO of the platform
针对无岛礁地形下的半潜平台,在零度浪向的入射波浪作用下,平台的纵荡、纵摇与艏摇运动由于平台关于入射波的对称性而接近于0;而由于岛礁的存在,波浪受到非均匀地形的影响其方向与波高发生变化,其关于平台的对称性被破坏,因此位于设定布放点的半潜平台在纵荡、纵摇与艏摇方向均会发生运动,纵荡在波周期14 s时产生1.09 m位移,而纵摇与艏摇在波周期18 s时出现峰值,分别为2.99°与2.59°。
对于受沿X方向的浪向影响最为主要的横荡、横摇与垂荡运动,岛礁地形下平台的运动响应随着波周期的变化规律整体上与无岛礁地形的规律相近,但由于固定的地形对波高的变化产生影响,因此岛礁地形下半潜平台的运动响应数值总体偏大,平台的横荡在波周期25 s时最大为8.05 m,平台的垂荡及横摇运动在波周期接近自然周期时出现响应峰值,同时受到岛礁地形对波高的影响,平台的垂荡与横摇运动在有地形条件下的峰值数值约为无地形条件下平台的2倍,垂荡运动在17 s时出现峰值为3.47 m,而横摇在波周期20 s时运动最大为16.25°。
3.2 平台响应与试验结果对比分析
平台模型试验在江苏科技大学波浪水池进行,水池底部按岛礁实测地形数据及模型缩尺比建造了假底以模拟地形的影响。图11为模拟地形的假底的建造示意图,图12所示为地形条件下半潜平台模型试验图。实验中进行了规则波作用下平台运动响应的试验研究,由此得到平台六自由度RAO数值。本文中应用AQWA开展数值分析的岛礁地形及平台布放位置与试验相一致。图13~18所示为数值计算与模型试验所得到的岛礁地形下平台运动响应的RAO对比图。

图11 模型试验的地形搭建Fig.11 Construction of the reef model for experiment

图12 半潜平台模型试验Fig.12 Model experiment of the platform
模型试验模拟的波周期范围为T=4.38~16.26 s。在此范围内数值计算与模型试验的运动响应变化趋势总体相近。对于受沿X方向的浪向影响最为主要的横荡、横摇与垂荡运动,数值计算结果与模型试验值对比较为吻合;而对于平台的纵荡、纵摇和艏摇运动,由于地形处沿Y方向斜坡的存在在一定程度上影响波浪的方向及波高变化,对比结果在波周期10~16 s存在一定的差异,对比试验数据,数值计算的纵荡值偏大而纵摇值偏小。这意味着数值模型中波浪沿与来波垂直方向的演化与实验结果有一定差异,而造成这种差异的原因,部分可以归结为数值模型中模拟的地形范围较实验中构造的地形偏小,当然也可能是计算所依据的线性波理论的局限性。整体而言,应用AQWA计算得出的岛礁地形下平台的运动响应结果与模型试验值对比吻合较好。
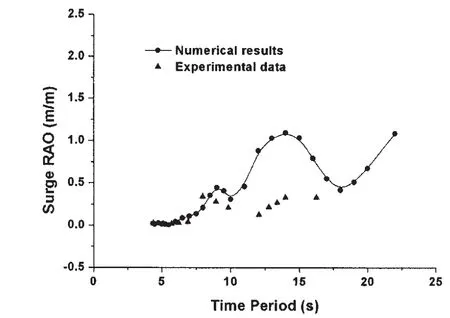
图13 平台纵荡运动响应RAO对比Fig.13 Comparison of the Surge RAO
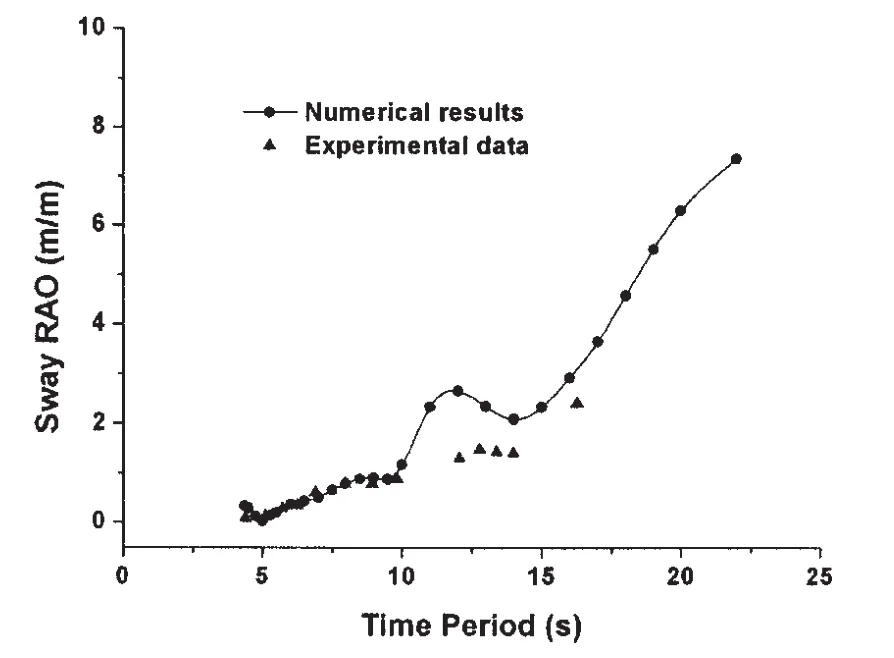
图14 平台横荡运动响应RAO对比Fig.14 Comparison of the Sway RAO
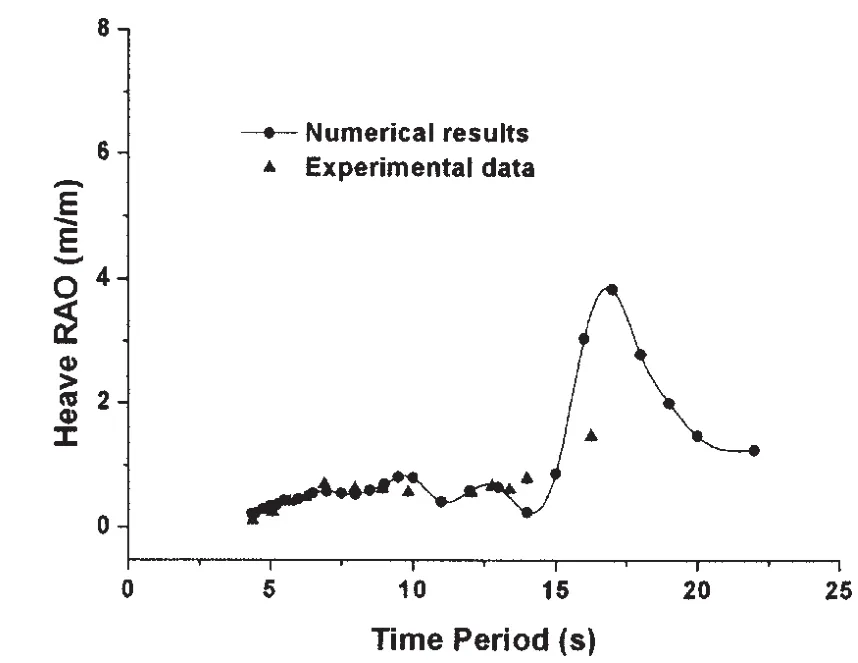
图15 平台垂荡运动响应RAO对比Fig.15 Comparison of the Heave RAO
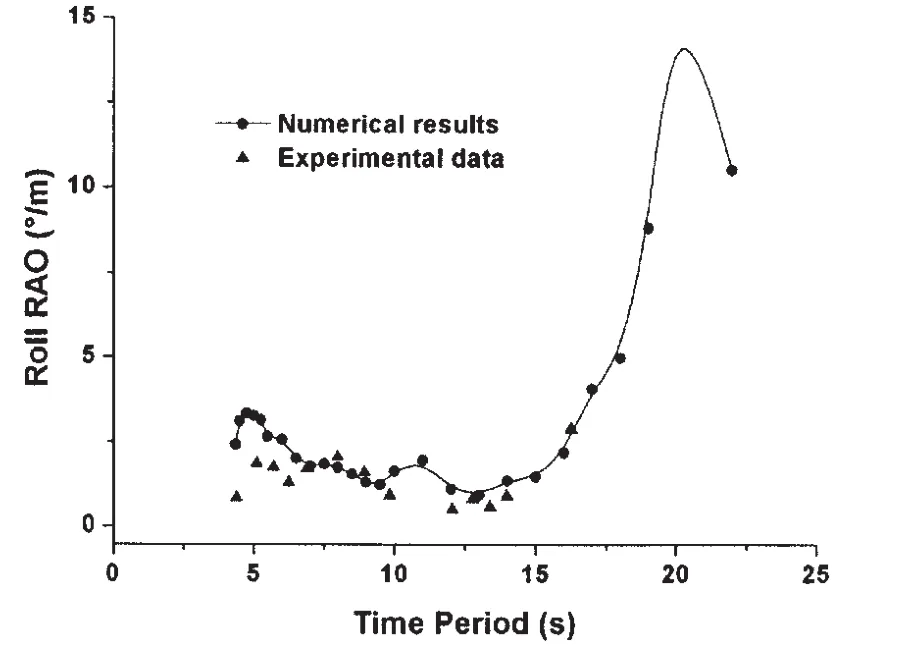
图16 平台横摇运动响应RAO对比Fig.16 Comparison of the Roll RAO
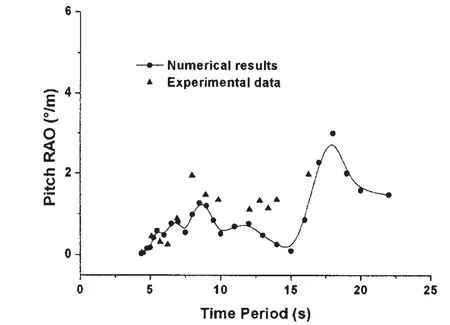
图17 平台纵摇运动响应RAO对比Fig.17 Comparison of the Pitch RAO
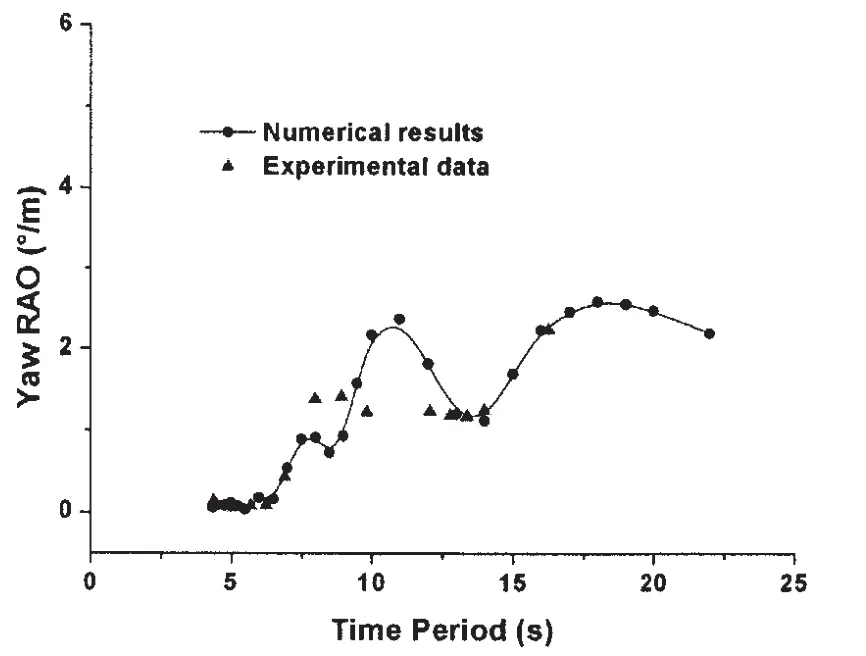
图18 平台艏摇运动响应RAO对比Fig.18 Comparison of the Yaw RAO
3.3 岛礁地形下平台短期预报分析
岛礁地形下平台在不规则波中的运动响应通过三小时短期预报得出。入射波应用JONSWAP谱,有义波高Hs为3 m,波谱峰周期Tp分别为6 s、8 s、10 s、12 s和14 s,谱峰提升因子γ选取3.0,如表3所示,其中数值为岛礁地形下平台短期预报所得到的运动响应最大值。
短期预报的结果表明,对于考虑地形条件的平台,近岛礁波浪方向下3 m有义波高的平台平动运动主要体现在横荡与垂荡,短期预报得到的运动最大值随着Tp的增大而增大;而对于平台的转动运动,受到来浪的作用,平台的横摇短期预报的最大值约在4.5°至6.5°范围,同时由于岛礁地形的特点,来浪方向下平台纵摇的短期预报最大值约为2.34°,艏摇运动的最大值可达4.68°。

表3 平台响应短期预报Tab.3 Short-term prediction of platform responses
4 结 论
论文基于一岛礁实地的地形数据,应用AQWA对岛礁地形下的半潜式平台开展数值计算和分析,重点研究岛礁地形下平台的运动响应,结合模型试验数据进行对比分析,得出以下主要结论:
(1)应用AQWA可以对岛礁地形下的半潜式平台进行数值计算模拟,所得到的地形条件下平台的运动响应结果与模型试验值对比吻合良好;
(2)对比无岛礁地形下平台的运动响应,岛礁地形下平台的运动响应数值及峰值大小总体上偏大,主要原因与入射波受岛礁影响波高总体增大及方向变化有关;
(3)与岛礁地形下入射浪向相关的平台横荡、垂荡与横摇运动响应的计算结果与试验值对比的吻合度相对较高,而纵荡、纵摇与艏摇运动的计算值与试验数值对比存在一定的差异。
本文应用数值分析方法,通过有无岛礁地形以及与模型试验结果的对比,为近岛礁条件下平台的性能研究和系泊系统设计提供了一种分析方法。
[1]王世圣,谢 彬,曾恒一,冯 玮,李晓平,张海滨.3000米深水半潜式钻井平台运动性能研究[J].中国海上油气, 2007,19(4):277-284. Wang Shisheng,Xie Bin,Zeng Hengyi,Feng Wei,Zhang Haibin.Study on motion performance of 3 000 meters deepwater semi-submersible drilling platform[J].China Offshore Oil and Gas,2007,19(4):277-284.
[2]朱 航,马 哲,翟刚军,欧进萍.风浪作用下HYSY-981半潜式平台动力响应的数值模拟[J].振动与冲击,2010,29 (9):113-118. Zhu Hang,Ma Zhe,Zhai Gangjun,Ou Jinping.Numerical analysis for the HYSY-981 semisubmersible platform motion responses in wind and wave[J].Journal of Vibration and Shock,2010,29(9):113-118.
[3]张 威.深海半潜式钻井平台水动力性能分析[D].上海:上海交通大学,2006. Zhang Wei.Hydrodynamic analysis for a deep-water semi-submersible drilling platform[D].Shanghai:Shanghai Jiaotong University,2006.
[4]肖宇维,孙树民.基于AQWA的轻型张力腿平台型式研究[J].科学技术与工程,2012,12(33):8987-8993. Xiao Yuwei,Sun Shumin.A study of light tension leg platform types based on AQWA[J].Science Technology and Engineering,2012,12(33):8987-8993.
[5]姚彦龙.三角形张力腿平台运动性能研究[D].哈尔滨:哈尔滨工程大学,2013. Yao Yanlong.Triangular tension leg platform motion performance research[D].Harbin:Harbin Engineering University, 2013.
[6]蒙占彬,李 牧,杨树耕.张力腿平台运动性能分析研究[J].中国海洋平台,2013,28(2):28-34. Meng Zhanbin,Li Mu,Yang Shugeng.The analysis and research of TLP’s motion performance[J].China Offshore Platform,2013,28(2):28-34.
[7]龙筱晔,李 巍,尤云祥.风浪流中Truss Spar平台耦合动力响应分析[J].中国海洋平台,2013,28(1):29-35. Long Xiaoye,Li Wei,You Yunxiang.Coupled dynamic analysis for a deep-water truss spar platform in wind,wave and current[J].China Offshore Platform,2013,28(1):29-35.
[8]Mansour A M,Huang E W.H-shaped pontoon deepwater floating production semisubmersible[C]//Proceedings of the 26th International Conference on Offshore Mechanics and Arctic Engineering.California,USA.OMAE2007-29385.
[9]Clauss G F,Schmittner C E,Stutz K.Freak wave impact on semisubmersibles time-domain analysis of motions and forces [C]//Proceedings of the 13th International Offshore and Polar Engineering Conference,2003,JSC-371.
[10]Lowa Y M,Langleyb R S.Time and frequency domain coupled analysis of deepwater floating production systems[J].Applied Ocean Research,2006,28:371-385.
[11]MOLIN.海洋工程水动力学[M].北京:国防工业出版社,2012.
[12]程小明,杨 鹏,吴 波.岛礁半潜式生产生活平台水动力性能分析[R].无锡:中国船舶科学研究中心科技报告, 2013. Cheng Xiaoming,Yang Peng,Wu Bo.Investigation on hydrodynamic performance of a semi-submersible platform for production and living[R].Wuxi:China Ship Scientific Research Center Report,2013.
Investigation on hydrodynamic performance of a semi-submersible platform near a reef island
WU Bo,CHENG Xiao-ming,TIAN Chao,DING Jun,LIU Xiao-long
(China Ship Scientific Research Center,Wuxi 214082,China)
The hydrodynamic performance of a semi-submersible platform positioned near a reef island is investigated both numerically and experimentally.The numerical results of the platform motions are compared with experimental data,which indicates that by considering the hydrodynamic interaction between the platform and the reef island in a conventional linear wave theory based on numerical method,the hydrodynamics and motions of the semi-submersible platform near the reef island can be numerically computed with a reasonable agreement with experimental data.
reef island;semi-submersible platform;hydrodynamic performanc;numerical analysis
U656.6
A
10.3969/j.issn.1007-7294.2015.07.003
1007-7294(2015)07-0773-09
2015-04-16
国家重点基础研究发展计划资助(2013CB036102);工信部高技术船舶科研项目资助工信部联装[2012]533
吴 波(1988-),男,工程师,E-mail:paulwu_china@163.com;
程小明(1957-),男,研究员,国家千人计划学者。
猜你喜欢
学苑创造·A版(2022年4期)2022-06-18
航空发动机(2020年3期)2020-07-24
当代陕西(2020年24期)2020-02-01
航天电子对抗(2019年4期)2019-06-02
小哥白尼(趣味科学)(2018年12期)2018-12-18
西南交通大学学报(2016年6期)2016-05-04
采矿与岩层控制工程学报(2015年3期)2015-12-16
海军航空大学学报(2015年1期)2015-11-11
浙江大学学报(工学版)(2015年7期)2015-03-01
中国航海(2014年1期)2014-05-09