微创介入手术导管机器人系统自适应模糊PID控制
2015-04-25 01:44赵希梅游健康刘浩李洪谊
机床与液压 2015年9期
赵希梅,游健康,刘浩,李洪谊
(1. 沈阳工业大学电气工程学院,辽宁沈阳110870;2. 中国科学院沈阳自动化研究所机器人学国家重点实验室,辽宁沈阳110016)
0 前言
目前,微创介入手术在治疗心血管病中得到广泛应用。与传统手术相比,具有出血少、创伤小、并发症少、术后恢复快等优点。然而人工介入手术也存在明显的不足,例如,医生长时间工作在射线环境中,危害自身健康,医生的误操作很容易导致血管穿孔,危害病人健康。随着机器人技术的发展,将机器人技术与血管介入技术有机结合是解决上述问题的重要途径。现在,国内外已有相关的研究出现。郭书祥等[1-2]提出了一种新型的导管机器人操纵系统,采用的是PID 控制;GANJI 等[3]进行了心脏内射频消融导管的输送实验,系统控制方法为比例控制;PENNING 等[4-5]分别进行了导管机器人系统的开环和闭环控制实验,采用积分控制方法控制导管的位置。国内也对导管输送系统展开了相关的研究,系统的控制方法一般为开环或简单的闭环[6-8]。
传统的PID 控制方法已经用于导管机器人控制系统中,但从手采用PID 控制不能很好地跟踪主手的控制信号,有时会出现较大的超调,存在安全隐患。由于介入手术中导管是柔性的设备,并且导管在血管中运动存在血流的阻力、血管的摩擦力等环境因素,同时驱动力和位移存在时延效应。因而建立包括变化的环境因素在内的导管精确模型是非常困难的。而自适应模糊PID 控制器动态性能好,不要求建立精确的数学模型,具有模糊控制的灵活性和适应性强的特点以及PID 控制精度高的优势,正好适合该系统控制的需要,能够提高导管机器人系统的跟踪性能。
1 系统的动态模型
主从导管机器人系统示意图如图1 所示,由主手和从手两部分组成。主手从手之间通过因特网连接。通过视觉反馈,医生可以在手术室外操控主手,向从手发送指令,进而控制从手操纵导管完成介入手术。利用主从机器人进行介入手术,可以避免医生遭受X射线的辐射。
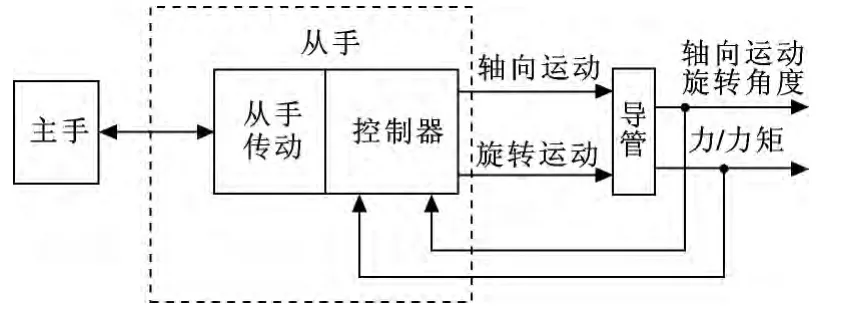
图1 主从导管机器人系统示意图
微创介入手术中,医生通过对导管的推拉和旋转操作,将其经血管送到病灶处。从手部分有两个自由度(轴向运动和旋转运动):推拉和旋转。轴向运动由一个步进电机驱动,旋转运动则采用直流电机驱动。两个电机各采用一个编码器来测量旋转运动的角度和轴向运动的位移。两个电机采用两个测力装置分别测量步进电机输出的力和直流电机输出的力矩。以下将建立导管机器人轴向运动和旋转运动的模型。
1.1 轴向运动的动力学模型
轴向运动采用步进电机驱动,从手部分包括机械输送机构和导管。根据牛顿第二定律建立轴向运动的动态模型[1]为:

式中:f(t)为步进电机输出的驱动力;x(t)表示导管轴向运动的位移;是运动的速度;m 表示运动部分的质量(主要包括电机与相关机械装置的质量,导管部分质量相对很轻,可以忽略);c 为黏性阻尼系数;k 是弹性系数。式(1)表示了驱动力和输出位移之间的关系。它相当于弹簧—物体—阻尼器组成的机械平移系统。令x1(t)=x(t),x2(t)=),则轴向运动的状态方程为:

1.2 旋转运动的动力学模型
旋转运动采用直流电机驱动机械旋转机构,从而带动导管运动。对于旋转运动的动力学模型采用弹簧-质量系统模型表示。其中质量与轴向运动模型中的相同。它相当于一个机械转动系统,由惯性负载和阻尼器组成。这里只考虑了近似于线性系统的情况,没有考虑电机运转时系统的各种摩擦、死区和时间延迟等造成非线性效应以及实际存在的各种不确定性。这样旋转运动动力学模型[2]为:


B1=
2 基于自适应模糊PID 控制的导管机器人系统设计
在上节中,建立了从手导管驱动系统的轴向运动和旋转运动的数学模型。但在建立模型的过程中,忽略了实际导管操作系统存在的许多非线性因素,如系统的死区、时滞效应等诸多不确定性的因素对模型精度的影响。所以建立的模型只是近似条件下的理想模型,并不能精确地描述该系统。在导管操作过程中,需要实时改变控制器的参数,减小或降低这些因素的影响。PID 控制器的参数选定后固定不变,而模糊控制能够根据系统控制的需要,实时在线调整PID 控制器的参数。因此,文中采用自适应模糊PID 控制方法控制机器人对导管进行推拉和旋转操作。
2.1 自适应模糊PID 控制器设计
自适应模糊PID 控制器以误差e 和误差的变化率ec 作为输入变量,模糊化后,经过模糊控制器的推理得到PID 参数的整定值Δkp、Δki、Δkd,实现PID 参数的实时自整定。误差e 和误差变化率ec 的模糊化后分别为E 和EC,输出量为Δkp、Δki和Δkd,它们的论域均为[-3,3],隶属度函数均为三角形。模糊子集均取为{NB,NM,NS,ZE,PS,PM,PB},分别表示负大、负中、负小、零、正小、正中、正大。各变量的模糊子集分布如图2 所示。

图2 模糊子集分布
自适应模糊PID 控制的核心是建立控制规则。根据不同的误差值和误差变化值,通过实时调整控制参数来达到最佳的控制效果。根据PID 参数整定原则[9],得到表1 至表3 所示模糊控制规则[10]。

表1 Δkp 的模糊控制规则

表2 Δki 的模糊控制规则

表3 Δkd 的模糊控制规则
模糊推理后需要把模糊量转变为精确量,即去模糊化。这里采用重心法来去模糊化。自适应模糊PID控制器结构如图3 所示。

图3 自适应模糊PID 控制器结构图
2.2 主从导管机器人系统的自适应模糊PID 控制
导管机器人系统对导管的推拉和旋转操作是独立进行的,它们之间没有耦合。因此,轴向运动和旋转运动的控制是单独进行,需要两个模糊PID 控制器。从手控制器接收到来自主手控制信号后,与反馈回来的信号 (导管的轴向运动位移和旋转角度)作差,再分别通过模糊PID 控制器给出合适的控制量,控制导管操作装置带动导管运动。主从导管机器人系统的自适应模糊PID 控制如图4 所示。

图4 基于自适应模糊PID 控制的主从导管机器人系统框图
3 系统仿真分析
为了验证所设计的基于自适应模糊PID 控制导管机器人系统性能,根据轴向运动和旋转运动模型,对系统进行仿真研究。其中,m = 1 kg,c = 0.04 N/ (m/s),k=2 N/m。轴向运动中kp、ki和kd的初始值分别为500、15、28.5;旋转运动中kp、ki和kd的初始值分别为400、7、26。
系统轴向运动的跟踪曲线如图5 所示。给定信号为主手给定的轴向移动的位移信号,输出为从手移动的位移信号。在3 s 时加入幅值为0. 1 mm 的扰动信号,扰动放大部分如图6 所示。系统旋转运动的跟踪曲线如图7 所示。输入信号为主手给定的旋转角度,输出为从手端的旋转角度。在3 s 时刻加入0. 1°的扰动信号,扰动放大部分如图8 所示。
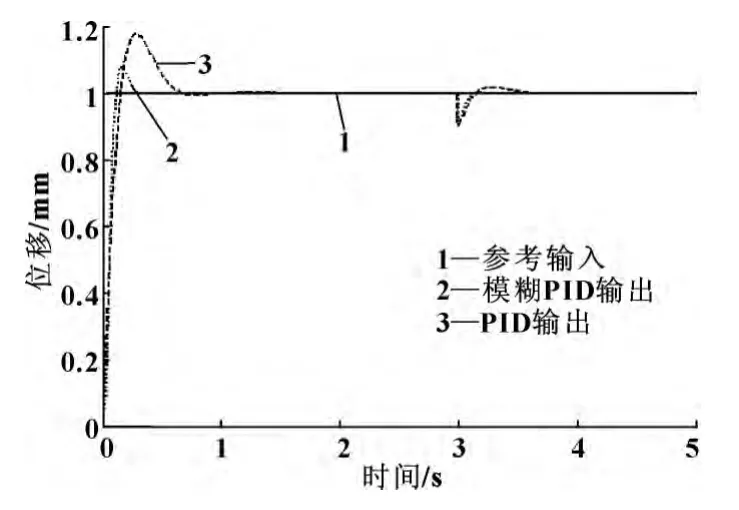
图5 轴向运动的跟踪曲线

图6 轴向运动跟踪曲线的局部放大图

图7 旋转运动的跟踪曲线

图8 旋转运动曲线局部放大图
从仿真结果可以看出,在轴向运动和旋转运动中,自适应模糊PID 算法在快速性、跟踪误差和抑制干扰方面均优于PID 算法,跟踪主手信号的能力明显提高。在跟踪误差方面,所提出的控制算法动态跟踪误差小于PID 控制算法。在抑制干扰方面,该控制算法的鲁棒性好于PID 控制算法。
4 结论
针对主从介入手术导管机器人系统中PID 控制存在的不足,建立了导管机器人系统从手轴向运动和旋转运动的动态模型,设计了自适应模糊PID 控制器分别控制导管的轴向运动和旋转运动。仿真结果表明,所提出的自适应模糊PID 控制方法降低了PID 控制方法的动态跟踪误差,明显提高了从手对主手控制信号的跟踪精度。同时,跟踪主手信号与抑制扰动的性能均显著提高。自适应模糊PID 控制器用于主从导管机器人系统不仅有助于提高导管介入的精度,也提高了从手对主手的跟踪性能和鲁棒性,确保了介入手术的安全。
[1]MA S,GUO S X,XIAO N,et al.Development of a PID Controller for a Novel Robotic Catheter System[C]//International Conference on Complex Medical Engineering.Harbin,2011:64-68.
[2]GUO J,GUO S X,XIAO N,et al.A Novel Robotic Catheter System with Force and Visual Feedback for Vascular Interventional Surgery[J].International Journal of Mechatronics and Automation,2012,2(1):15-24.
[3]GANJI Y,JANABI-SHARIFI F,CHEEMA A N,et al.Remote Controlled Robot Assisted Cardiac Navigation:Feasibility Assessment and Validation in a Porcine Model[J].The International Journal of Medical Robotics and Computer Assisted Surgery,2011,7(4):489-495.
[4]PENNING R S,JUNG J,BORGSTADT J A,et al.Toward Closed Loop Control of a Continuum Robotic Manipulator for Medical Applications[C]//2011 International Conference on Robotics and Automation,Shanghai,2011:4822-4827.
[5]PENNING R S,JUNG J,FERRIER N J,et al.An Evaluation of Closed-Loop Control Options for Continuum Manipulators[C]//2012 International Conference on Robotics and Automation,Saint Paul,2012:5392-5397.
[6]刘达,刘登岭.血管介入手术机器人推进机构的精度试验研究[J].机械设计与研究,2010,26(6):41-44.
[7]付宜利,高安住,刘浩,等.导管机器人系统主从介入[J].机器人,2011,33(5):579-584.
[8]段星光,陈悦,于华涛.微创血管介入手术机器人控制系统与零位定位装置设计[J].机器人,2012,34(2):129-136.
[9]蓝益鹏,邱超.磁悬浮永磁直线电动机悬浮系统模糊PID 控制系统的设计[J].机床与液压,2013,41(7):94-96,100.
[10]黄卫华.模糊控制系统及应用[M].北京:电子工业出版社,2012.
猜你喜欢
水泵技术(2021年5期)2021-12-31
云南化工(2021年10期)2021-12-21
制造技术与机床(2018年12期)2018-12-23
制造技术与机床(2017年6期)2018-01-19
电测与仪表(2016年24期)2016-04-12
灾害医学与救援(电子版)(2016年2期)2016-03-11
探测与控制学报(2015年4期)2015-12-15
中国医学影像学杂志(2015年9期)2015-12-15
制造技术与机床(2015年10期)2015-04-09
组合机床与自动化加工技术(2014年12期)2014-03-01