
异步电机的动态复数模型及其教学应用
2015-04-26 08:36彭亦稰陈小元
电气电子教学学报 2015年6期
彭亦稰,陈小元
(丽水学院工程与设计学院,浙江丽水 323000)
0 引言
随着电力电子技术和微控制器技术的发展,在电气类专业的课程中,基于异步电机动态数学模型实施控制的内容明显增加。为便于控制编程,文献[1-5]中均用矩阵来表达异步电机的动态数学模型。但矩阵模型的推导过程繁杂且不直观形象,学生学习会存在一定的困难。
本文提出一种简练形象的时空合一的异步电机动态复数矢量数学模型及其等效电路,用复数矢量计算和矢量方程的定向求解,诠释难懂的异步电机矩阵数学模型,解析异步电机的调速控制策略。
1 三相异步机的动态复数矢量数学模型
三相异步电机的定、转子绕组如图1所示。
图中uA、uB和uC为定子三相绕组相电压,ua、ub和uc为转子三相绕组相电压;iA、iB和iC为定子三相绕组电流,ia、ib和ic为转子三相绕组电流;θ是转子与定子间的转角,转子旋转的角速度ω为:

图1中,定子 A、B、C 三相绕组和转子 a、b、c三相绕组的电压方程分别为:

图1 三相异步电机绕组

式中Rs和Rr分别为定子和转子的相绕组电阻,ψA、ψB、ψC和 ψa、ψb、ψc分别为定子 A、B、C 绕组和转子a、b、c 绕组的全磁链。
1.1 三相异步机的动态复数矢量电压方程
考虑到定子A、B和C相绕组在空间相隔2π/3,将ke-jγ、kej(2π/3-γ)和kej(4/3-γ)分别乘 A、B 和 C 相绕组的电压方程,并相加整理得定子电压矢量方程:
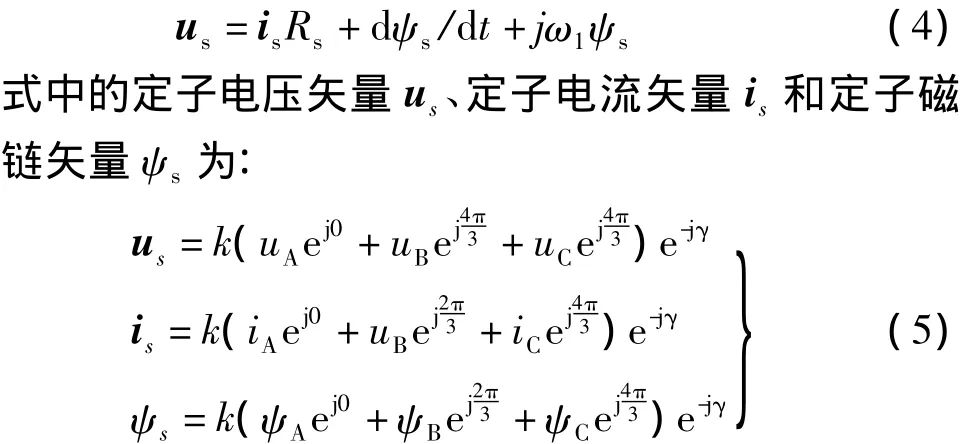
式中k为比例系数,e-jγ为矢量旋转因子,γ为旋转角,式(4)中的ω1为旋转因子的角速度:

考虑到转子a、b和c相绕组在空间相隔2π/3,且与 定 子 间 有 转 角 θ,将ke-j(γ-θ)、kej[2π/3-(γ-θ)]和kej[4π/3-(γ-θ)]分别乘 a、b 和 c 相绕组的电压方程,并相加整理得转子电压矢量方程:

1.2 三相异步机的动态复数矢量磁链方程
三相异步电机的定子磁链矢量ψs为:

其中Lσr为转子绕组漏电感。
1.3 等效电路、转矩方程和转动方程
将定转子的磁链矢量方程式(12)和(14)代入定转子的电压矢量方程式(4)和(10)可得:

由式(16)可得三相异步电机的动态复数矢量等效电路,如图2所示。

图2 三相异步电机的动态复数矢量等效电路
由图2可知三相异步电机吸收的电磁功率为

因复数电压、电流和磁链矢量可以表示为:

式中,下标带有d者表示实部,或称为d轴分量;下标带有q者表示虚部,或称为q轴分量。
由式(19)、(18)、(17)、(14)和(12)可得三相异步电机的电磁转矩方程为:

式中J为电机拖动系统的转动惯量,TL为电机的负载转矩。
2 矢量的旋转变换和相变换
2.1 矢量的旋转和旋转变换
在矢量方程中给所有矢量乘相同旋转因子e-jγ,不会改变各矢量间的相对关系。当矢量旋转因子的γ =0 时,各矢量用 us0、is0、ψs0和 ur0、ir0、ψr0表示,对应转速ω1=0,矢量方程中的矢量处于静止坐标系中;当γ≠0且ω1≠0时,表示矢量方程中的矢量处于以转速ω1顺时针旋转的坐标系中。由式(5)和(11)可知,γ≠ 0 时的矢量 us、is、ψs和 ur、ir、ψr为γ =0时矢量与旋转因子e-jγ的乘积,则is的实部、虚部与is0的实部、虚部之间的换算关系为:

式(22)和式(23)即为异步电机矩阵数学模型中的坐标旋转变换式。
2.2 矢量的相轴和相变换
式(5)和(11)表示的矢量由空间对称的三个相轴上的分量构成,式(19)表示的矢量由空间正交的两个相轴上的分量构成。以定子电压矢量为例,γ=0时,由式(19)和式(5)可得:

式(24)反映了正交两相轴与对称三相轴均处于静止,且d轴与A轴重合时,定子电压矢量的正交两相表示与对称三相表示之间的关系。将三相电压之和为零代入式(24),得换算关系:

式(25)和式(26)即为异步电机矩阵数学模型中的3/2相变换式。
3 调速系统的动态模型与控制策略
图3所示,为三相笼型异步电机的三相全桥变压变频调速系统主电路。

图3 三相异步机变压变频调速系统主电路
可将电路与电机作为一个整体,以电源侧电压uAO、uBO、uCO和电机负载转矩TL为输入,建立调速系统主电路的动态数学模型。
3.1 调速系统主电路的动态矢量模型
矢量表达式(5)中的uA、uB和uC为图3中A、B和C端对O'点的电压,而图中A、B和C端对O点的电压uAO、uBO和uCO为前者与uO'O之和。对电压uAO、uBO和uCO列矢量表达式:

式(27)表明,系统电源端电压矢量与电机端电压矢量相等,三相异步机动态矢量模型就是整个调速系统主电路的动态矢量模型。
三相笼型异步电机的转子电压矢量ur=0,主电路矢量模型的输入变量为定子电压矢量us和电机的负载转矩TL。因电机的运行状态由定、转子电压方程和转动方程确定,故异步电机独立的状态变量只有三个。首选可测量的定子电流矢量is和转速ω为状态变量;再选定子磁链矢量ψs或转子磁链矢量ψr为状态变量,以便控制电机的励磁。
3.2 以转子磁链定向的控制策略
在动态复数矢量方程中,若其中的旋转因子e-jγ能使转子磁链矢量ψr的幅角为零,则称该动态矢量方程为以转子磁链定向的动态矢量模型。此时:

由式(29)的第一式知,以转子磁链定向时,转子磁链ψr由定子电流实部isd决定;由式(30)知,电磁转矩由定子电流虚部isq决定。isd为电机的励磁电流,isq为电机的转矩电流;对isd和isq控制如同对直流电机的励磁电流控制和电枢电流控制。故以转子磁链定向对三相异步电机实施控制,可采用直流电机的控制策略,而以转子磁链定向的动态模型被称为三相异步电机的等效直流电机模型。
3.3 静止坐标下的转子磁链测量计算
当γ=0、ω1=0时,以定子电流矢量、转子磁链矢量和转速为状态变量的转子电压方程为

以转子磁链定向,必需先获得静止坐标下的转子磁链ψr0。可先测取定子电流,再由式(31)计算出静止坐标下的转子磁链ψr0。
4 结语
三相异步电机的动态复数矢量模型与动态矩阵矢量模型可以相互印证,其本质完全相同。动态复数矢量模型简练形象,物理概念清晰,易于理解;而采用动态矩阵矢量模型的优点是便于控制编程。推荐学生学习异步电机的动态复数矢量模型,对促进学生理解和研发基于动态数学模型的高性能异步电机调速控制系统具有现实意义。
[1]阮毅,陈伯时.电力拖动自动控制系统(第4版)[M].北京:机械工业出版社,2014:155-199.
[2]李华德,李敬,白晶.电力拖动自动控制系统[M].北京:机械工业出版社,2009:127-232.
[3]李宁,白晶,陈桂.电力拖动与运动控制系统[M].北京:高等教育出版社,2009:67-141.
[4]马小亮.异步电动机矢量控制[J].天津:电气传动,2010,40(9):3-8,40(10):3-8.
[5]阮毅,徐静,陈伯时.智能PI控制在交流调速系统中的应用[J].北京:电工技术学报,2005,20(3):80-84.
猜你喜欢
防爆电机(2020年5期)2020-12-14
防爆电机(2020年5期)2020-12-14
防爆电机(2020年4期)2020-12-14
哈尔滨铁道科技(2020年4期)2020-07-22
电子制作(2019年23期)2019-02-23
电测与仪表(2016年10期)2016-04-12
华东理工大学学报(自然科学版)(2015年2期)2015-11-07
电测与仪表(2014年17期)2014-04-04
组合机床与自动化加工技术(2014年10期)2014-03-01
振动、测试与诊断(2014年4期)2014-03-01
