
基于SimMechanics的四自由度机械手控制系统机液耦合仿真
2015-04-26 08:24朱琪吴雁何玉安
机床与液压 2015年3期
朱琪,吴雁,何玉安
(1.上海应用技术学院机械工程学院,上海 201418;2.上海第二工业大学机电工程学院,上海 201209)
0 前言
随着近些年工业机械手价格逐步降低,功能越来越强大,当今许多行业逐步将工业机械手代替人工操作。工业机械手以其速度快、精度高、工作时间长等优势,被广泛地运用在各个行业中。但是在工业机械手的设计过程中,运动学表达式十分复杂繁琐,机械部分和液压部分之间关系和液压缸驱动力大小又不易确定,给机械手的设计带来很多困难。本文作者结合使用Simulink中的SimMechanics工具箱和SimHydraulics工具箱,对工业机械手的机械结构和液压结合建模仿真,分析仿真结果数据,查看仿真轨迹,可以大大提高了工业机械手研究效率。
1 机械手机械结构分析
文中分析的机械手驱动类型是液压驱动,液压传动机械手有以下一些优点:抓取力大、传动平稳、结构紧凑。机械手机械部分由底座、大臂、小臂、手抓和液压缸等部件组成。该机械手有4个自由度,包括底座的旋转、大臂绕底座的旋转、小臂绕大臂的旋转、手抓的旋转。该关节型机械手是由一系列关节连接各个部件组成的具有多自由度工业机械手,机械手的一端是固定在底座,另一端是自由端,可以抓取物体完成各种操作。各个关节由液压缸驱动,关节相对运动促使大臂和小臂的运动,使得末端抓手达到所需要的位置。图1为机械手的结构示意图,以底座为参考坐标系,每一个关节建立相对坐标系,每个关节坐标系的参数如表1所示。
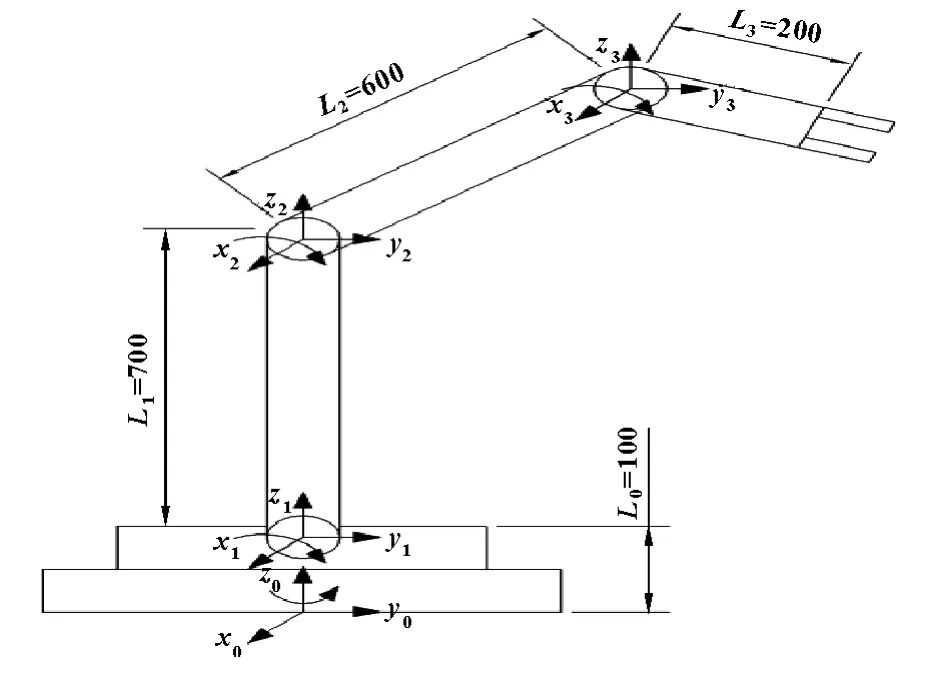
图1 机械手部件坐标示意图

表1 机械手部件坐标参数
2 机械手运动学分析
机械手的末端执行器在空间位置,速度和加速度的变化可以通过运动学逆解得到相关参数,θ0是关节的起始角度,˙θ0和¨θ0是关节的起始速度和加速度作为边界条件,为了使得末端轨迹平稳,速度和加速度不产生剧烈变化,因此关节轨迹采用多项式表达式:

对式(1)分别求一阶导数和二阶导数,得关节在t时刻的速度和加速度函数:

式中:t为时间变量;a0,a1,a2为多项式系数,由边界条件得:,代入式(2)得:

3 SimMechanics建模与仿真
3.1 SimMechanics模型建立与仿真系统
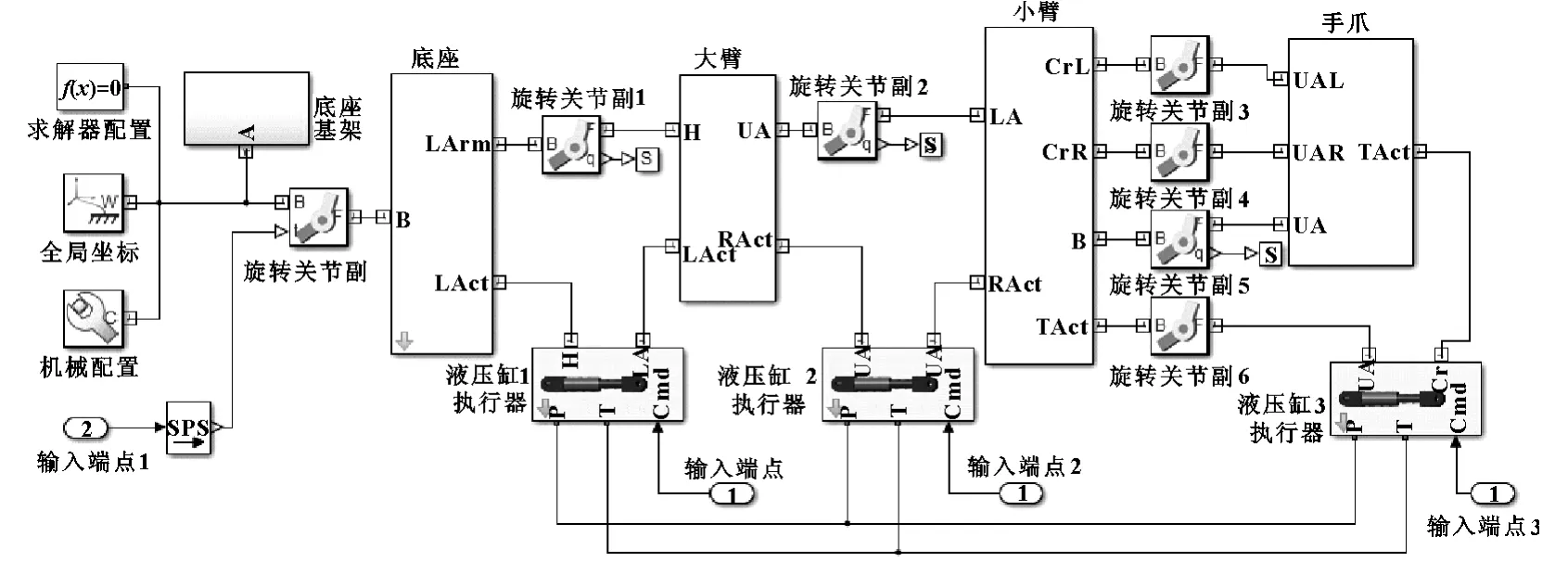
图2 机械结构系统模型图
SimMechanics是Simulink的一个工具箱,它具有物理建模方便、仿真结果直观等特点。文中使用SimMechanics Second Generation对机械手建模仿真,相比SimMechanics First Generation来说,它为三维的机械系统建模提供了模块库,可以使用库里的各个模块联合定义机械零件,设置零件的几何结构、质量、惯量,以及它和其他零件相连的方式,可以将定义好的零部件打包封装成一个子系统,把它作为一个现成的零件,通过关节模块(joint),与其他零件组装起来。
用户可以从各个模库块中选择实体、关节、约束和力的类型进行相互连接,对建立的模型参数化,然后SimMechanics会解决整个机械系统的运动方程。通过仿真模型可以分析运动轨迹和计算力的大小。Sim-Mechanics提供了3D视图方便模型查看,动画形象的演示仿真结果,从3D视图表现各个零件关节定义和组装形式,用户可以比较直观的看出模型的运动形式。SimMechanics依靠的是物理结构建模,而不是使用复杂的运动学和动力学方程式,这样可以大大降低了设计者的工作量。
图2为该机械手建立的机械结构仿真系统,有4个子系统部件模型,分别代表底座(dizuo),大臂(dabi),小臂(xiaobi)和手抓(shuozhua)的机械模型,旋转关节副(Revolute Joint)连接各个子系统部件模型,液压缸物理模型(yeyagang Actuator)作为驱动器,推动各个大臂和小臂的运动。还需要对各个子模块进行参数设置以便于机械手动力学仿真。
3.2 SimHydraulic模型建立与仿真系统
SimHydraulic是Simulink另一个工具箱,它主要是液压动力和控制系统模型的建立和仿真,用户可以从SimHydraulic库中选取需要的液压元器件,连接成液压系统回路,还可以将模型的液压部分和机械部分连接起来,依靠液压动力驱动机械结构,仿真结果可以使用户了解液压回路和机械模型相互关系。
图3为一个液压缸的液压控制回路系统图,由一个三位四通换向阀(Directional Valve)的换向控制A或B端出油以此推动液压缸(Hydraulic Cylinder)的伸出缩回,液压缸与SimMechanics中的移动关节副(Prismatic Joint)物理连接,Simulink中设置的数字信号通过数模转换器(Convertor)转成模拟量控制三位四通换向阀的S端,S端为换向阀的物理信号端,控制换向阀的换向位置,P端和T端口分别为换向阀的进油口和回油口。仿真液压回路时,换向阀在不同的位置液压缸状态不同,液压缸控制移动关节副的移动,从而形成液压缸机械结伸出和缩回。

图3 液压控制系统模型图
3.3 仿真实验结果
完成整个机械手机械和液压部分的仿真系统模型建立后,运行仿真系统。在进行系统模型的仿真中可以实时观察机械手的模拟运动。机械手的仿真轨迹可以通过关节传感器(Transform Sensor)显示,在手抓末端放置关节传感器,以测量出机械手末端的运动状态,它把测量出x,y,z轴的坐标位置,通过模数转换器(PS-Simulink Converter)把数据传送至Matlab中的Workspace,利用Workspace中的数据编写Matlab的M文件绘制机械手末端轨迹图。
图4为SimMechanics绘制出机械手轨迹模拟图,运动顺序:1→2→3→4→5→6。
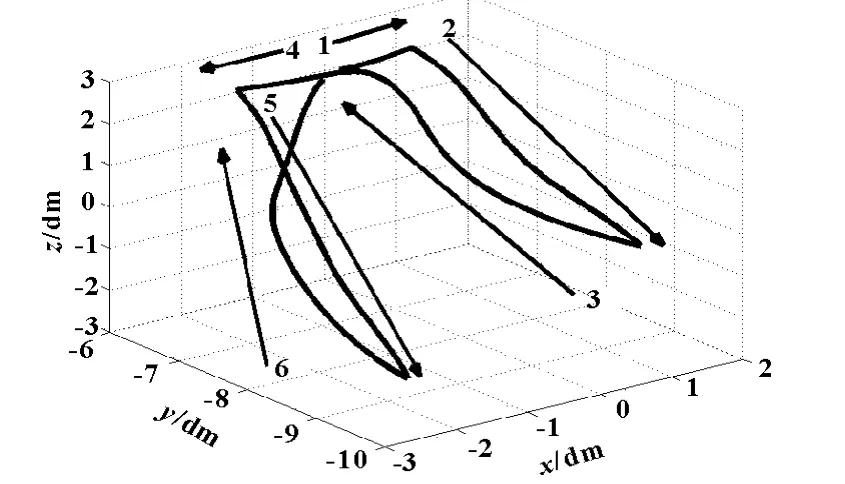
图4 机械手轨迹模拟
机械手运动分6个阶段:(1)从初始点移动到带抓取物体地点,(2)向下抓取物体,(3)抓好物体后提升机械手,(4)移动到放置物体地点,(5)向下放置物体,(6)回到初始地点。
模拟结束后,利用仿真结果数据,用Polt命令工具绘制出各个旋转关节的角速度和角加速度曲线图,如图5、6所示。
由图5可知:机械手关节角速度没有发生速度突变,关节运动比较平缓连续,各个关节处没有发生柔性冲击。由图6可知:机械手关节的角加速度符合设计要求,机械手关节运动连续连贯,机械手可快速准确的抓取物体。
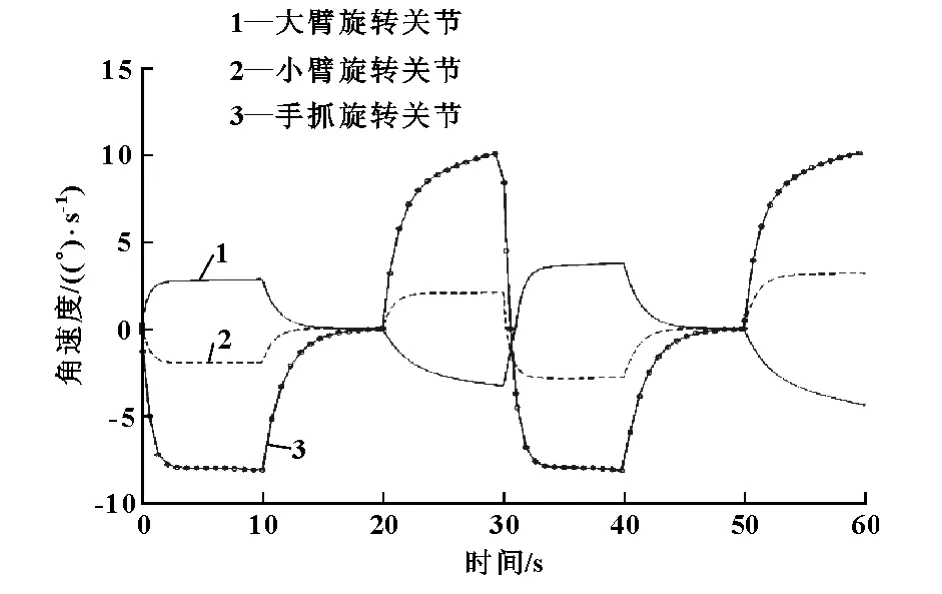
图5 关节角速度图
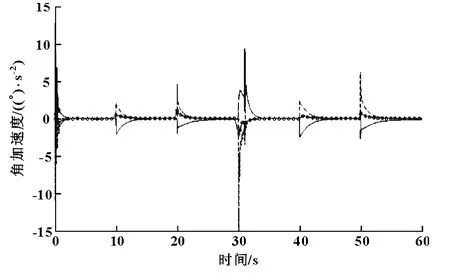
图6 关节角加速度图
各个旋转关节处驱动液压缸的AB端的压力大小曲线图如图7所示。
由图7可知:各个液压缸的A端和B端的压力满足液压缸压力要求,在0~20 s机械手关节运行过程,液压缸压力变化较大。液压缸在20~40 s机械手稳定抓取过程,液压缸内的压力从振荡趋于收敛,液压系统控制效果良好。
4 结论
对SimMechanics中各个模块的连接和设置方法作了说明,可以从仿真结果中发现,对于机械手的运动轨迹,机械手末端和各个关节运动平稳,没有剧烈的冲击,各个关节没有相互干涉,轨迹和预期设定相符,为分析和设计工业机械手提供可靠的依据。机械手运动轨迹复杂以及各个关节处的耦合给控制机构带来了很大的困难,SimMechanics相比其他软件的仿真,无论从功能还是效率上都有较大的优势,并且SimMechanics Second Generation还实现了三维的动态显示,如图8所示。通过SimMechanics和SimHydraulic结合运用,形成了机械液压结合仿真,使得设计者能够直观分析机械机构与液压执行机构之间的关系,为设计机械手研究工作创造了便利的条件,同时为机械手仿真提供了强大而有力的工具。

图8 三维机械手动态模型图
[1]MathWorks Corp.SimMechanics User’s Guide[R].Math-Works.Inc,2009.
[2]MathWorks Corp.SimHydraulic User’s Guide[R].Math-Works.Inc,2009.
[3]汪汇.3-RRRT并联机器人运动仿真SimMechanics实现[J].现代机械,2008,35(3):44-45.
[4]郑洪波,孙友松.基于Simulink/SimHydraulics的液压系统仿真[J].锻压装备与制造技术,2010,45(6):31-34.
[5]徐梓斌,闵剑青.基于SimMechanics的曲柄滑块机构运动分析[J].煤矿机械,2004,25(1):63-65.
[6]薛定宇,陈阳泉.基于MATLAB/Simulink的系统仿真技术与应用[M].北京:清华大学出版社,2001.
[7]陈杰.MATLAB宝典[M].北京:电子工业出版社,2001.
[8]王鲁敏,李艳文.基于Matlab的教学型机器人空间运动轨迹仿真[J].机械与电子,2005,23(9):55-57.
猜你喜欢
环境技术(2021年4期)2021-09-11
制造技术与机床(2017年4期)2017-06-22
载人航天(2016年4期)2016-12-01
电子制作(2016年19期)2016-08-24
通信电源技术(2016年1期)2016-04-16
液压与气动(2015年6期)2015-04-16
机电信息(2015年3期)2015-02-27
综合智慧能源(2014年1期)2014-09-10
中国工程机械学报(2014年3期)2014-05-25
筑路机械与施工机械化(2014年2期)2014-03-01
