
现代飞机作动系统余度设计和维修性分析
2015-04-27 02:46刘艺涛
机床与液压 2015年16期
刘艺涛
(广州民航职业技术学院,广东广州510403)
早期民用飞机的飞行控制系统全部采用机械杆系来控制操纵面的偏转,作动器为机械液压作动器。1983年首架空客A320 飞机成功采用全电传飞控系统后,民用飞机进入了电传控制时代。目前除了空客公司的A320,A330/340,A380 和A350 飞机,波音公司的B777 和B787 飞机也采用电传飞控系统。与B737 等飞机的机械操纵系统采用钢索传递飞行员指令、机械液压伺服作动器驱动操纵面不同,电传飞控系统通过驾驶杆(侧杆) 的位移传感器将飞行员动作指令转换为电信号并发送给飞控计算机,由控制律计算后将控制指令传送到作动系统,最后由电液伺服作动器根据电流指令来驱动操纵面运动。
当前,随着A380 和B787 等多电飞机的出现,今后民用飞机飞控系统的发展趋势是将会采用功率电传的新型作动器。但目前此类作动器一般作为备份使用,传统的电液伺服作动系统依然处于主导地位。
1 飞机作动系统余度设计
一般来说,提高系统可靠性的方法有两种: (1)通过提高系统的基本可靠性实现(如选用高质量等级元器件) ,这种方法付出的代价高昂,而可靠性提高并不显著,工程中也往往达不到可靠性要求指标;(2) 采用余度技术提高系统任务可靠性。余度技术就是利用硬件或软件冗余来提高系统运行可靠性的一种方法,这种方法虽然会降低系统的基本可靠性,但可以提高系统容错能力,能够达到提高系统的任务可靠性的目的。
目前,现代飞机电传飞控系统均采用余度设计技术提高系统可靠性。飞控计算机一般为三余度或四余度容错计算机,采用相似的或非相似的余度设计技术。作为飞控系统的执行机构,作动系统是飞控系统的重要组成部分,其系统性能及可靠性的好坏,直接影响到飞控系统乃至飞机的性能及可靠性。由于飞机上操纵面众多,不同操纵面重要性不同,可靠性要求也不同,因此不同的操纵面,其作动系统会采用不同的余度设计。下面选取空客A320 和波音B777 两型飞机,对照分析飞控作动系统的余度设计技术。
1.1 A320 作动系统
A320 飞控系统采用三余度/二余度(相似硬件,非相似软件) 技术,飞控计算机采用双通道配置,一个通道为命令通道,另一个通道为监控通道,两个通道采用相同的CPU 芯片,软件采用不同的算法实现。A320 包括7 个飞控计算机: 两个升降舵副翼计算机(ELAC) 、3 个扰流片升降舵计算机(SEC) ,两个飞行增稳计算机(FAC) ,其中ELAC 和SEC 为主飞控计算机。它们根据正常、备用或直接法则处理飞行员和自动驾驶仪的输入。另外增加两个飞控数据集中器(FCDC) ,用于主飞控计算机和其他飞控系统之间进行通信。A320 飞机飞控计算机结构如图1所示。
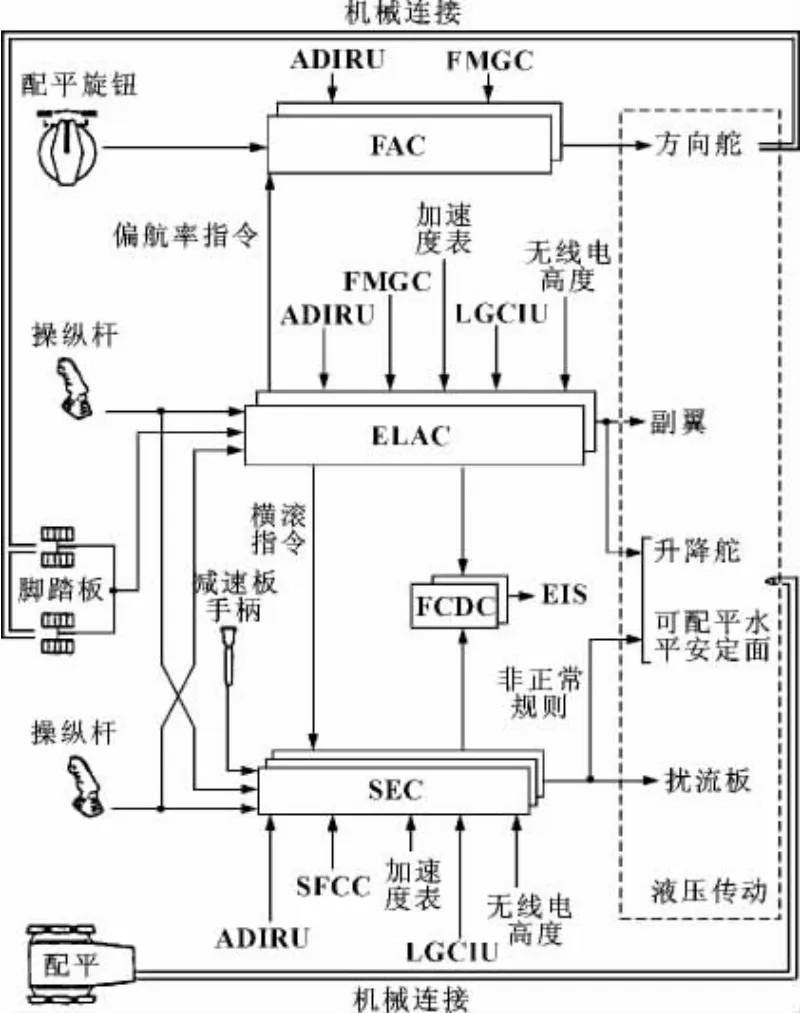
图1 A320 飞机飞控计算机结构
飞控计算机的指令传送到电液伺服作动系统,利用液压力驱动操纵面偏转。其中每个副翼有两个作动器,每个作动器受不同计算机控制,由不同液压驱动。正常状态只有一个作动器工作,称为主动状态;另一个作动器随动,称为阻尼状态。当主动状态作动器的计算机或液压失效时,会切换到阻尼状态; 原来阻尼状态的作动器则切换到主动状态,接管对副翼操纵面的控制。升降舵作动系统与副翼的类似,但控制计算机余度增多,每个作动器由2 个计算机控制。方向舵由2 台计算机控制,由3 个不同液压源的作动器共同驱动,当某个液压失效时,对应的作动器转为阻尼随动状态。扰流板没有采用余度设计,每个扰流板只有1 个计算机控制和1 个液压力作动。除扰流板以外的所有操纵面的作动器,在某一时刻只有1 台计算机有控制权,当前计算机失效时控制权会切换到备用计算机。A320 飞机飞控作动系统的计算机和液压分布如图2 所示。

图2 A320 飞机作动系统布局
下面以副翼作动系统为例,分析系统故障时计算机和作动器的切换过程。副翼系统共有4 个作动器(如图2 所示) ,正常情况下,左外和右内两个作动器处于主动模式,左内和右外两个作动器处于阻尼模式; 左外和右外两个作动器由蓝液压驱动,左内和右内两个作动器由绿液压驱动。系统一切正常时,ELAC 1 控制左外和右内两个作动器工作。如图3 所示,ELAC 1 控制作动器内部电磁阀通电,阀门打开,液压力进入到模式选择阀,阀芯在液压力作用下移到左边。计算机控制信号传至伺服阀,控制液压力来驱动作动筒运动的方向和幅度,从而带动副翼的偏转,此时作动器处于主动模式。模式选择阀位置和作动筒位置分别通过传感器信号反馈传回计算机,构成闭环控制系统。
当ELAC 1 计算机故障时,如图4 所示,电磁阀断电,阀门把液压切断,模式选择阀在弹簧力作用下移到右边,此时作动器处于阻尼模式(旁通状态) ,副翼由相邻作动器驱动。活塞杆反过来被操纵面带动,使得作动筒两个腔室里的油液受迫流过节流孔而产生阻尼力。如果作动器失去液压力时,模式选择阀也会移到右边,作动器处于阻尼模式。不论何种情况,只要模式选择阀处于阻尼模式位置(右边) ,其位置传感器将信号反馈回ELAC 1,则控制逻辑会让ELAC 2 给原来处于阻尼模式的作动器电磁阀通电,将其转换成主动模式,接管对副翼的控制。因此,只要有计算机或者液压故障,副翼作动系统的两个作动器会随即切换模式,作动器切换时其电控计算机和液压源随即也切换,保证副翼能正常工作。
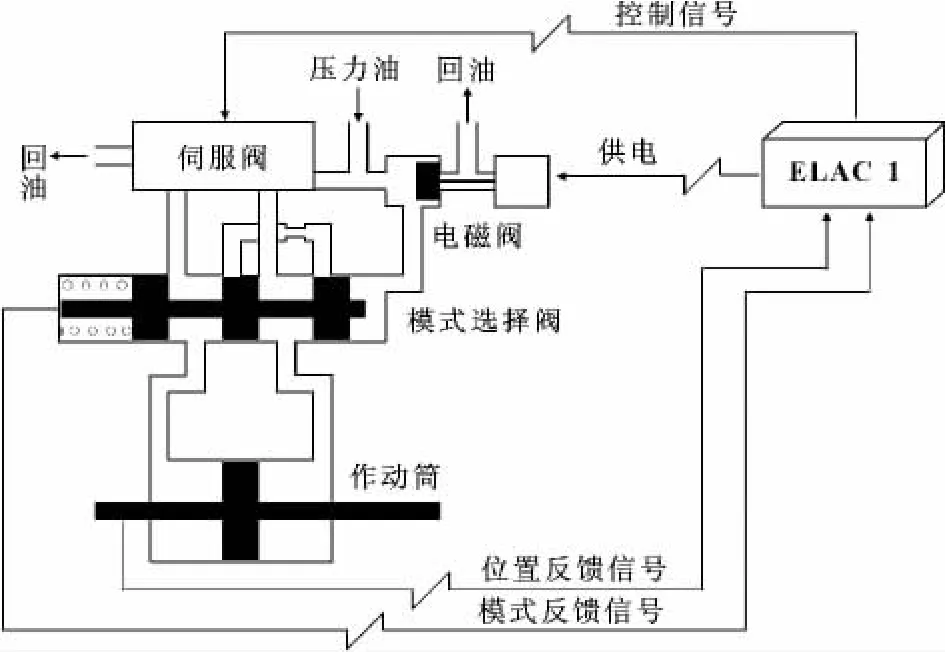
图3 副翼作动器主动模式
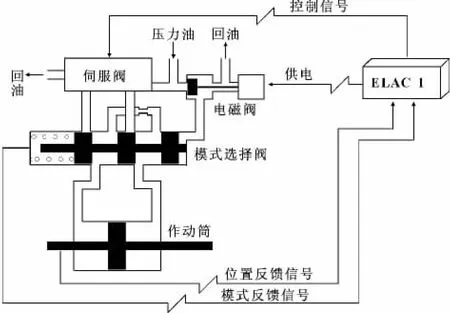
图4 副翼作动器阻尼模式
1.2 B777 飞机作动系统
B777 飞机在三余度的飞控计算机(PFC) 当中采用了非相似余度技术,它的3 套液压能源和伺服作动系统均是相似余度的。飞控制计算机包括3 个相同的主飞控计算机(左PFC、中PFC 和右PFC) ,每个主飞控计算机中有3 个非相似的计算机通道。飞控计算机根据控制律和飞行包线保护计算操纵面的控制指令,计算指令信号通过ARINC 629 总线再发送到4 个作动筒控制电子装置ACE (L1,L2,C,R) ,ACE 将这些数字信号转换为模拟信号,并将它们发送到动力控制组件 (PCU) ,再由CPU 控制操纵面的偏转。B777 飞机飞控计算机结构如图5 所示。
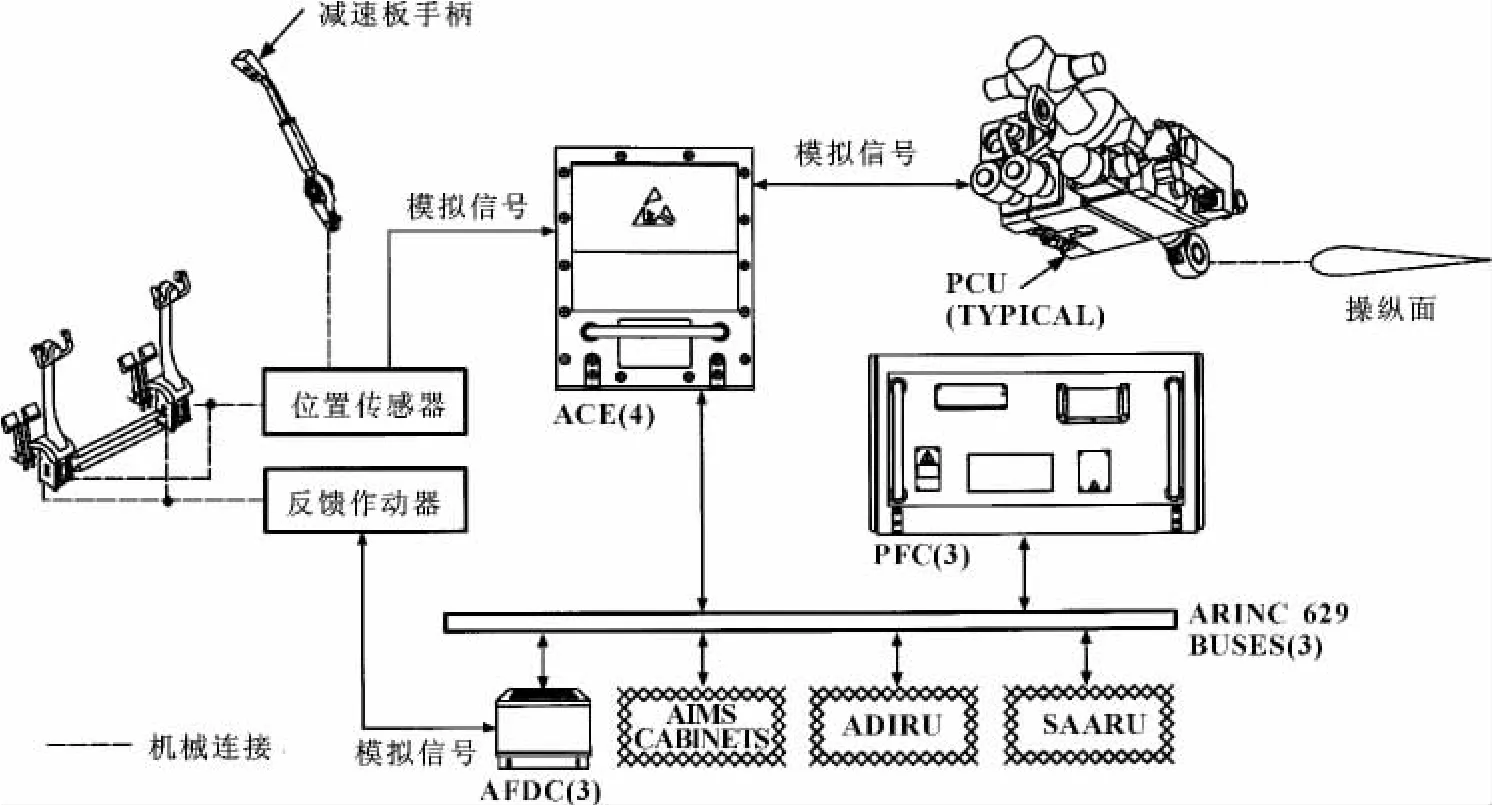
图5 B777 飞机飞控计算机结构
B777 飞机飞控作动系统的每个操纵面由不同余度的PCU 来控制(如图6 所示) 。
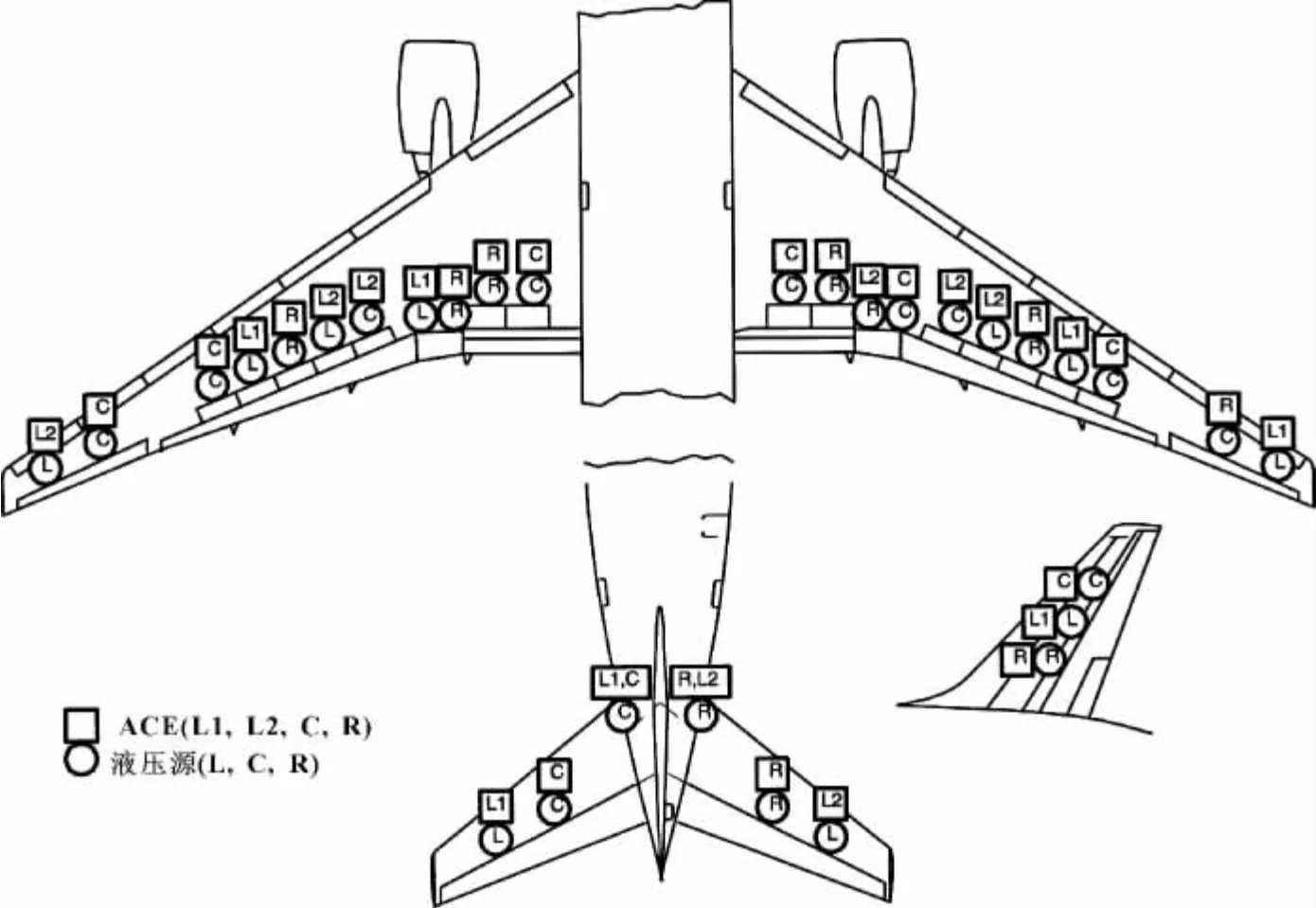
图6 B777 飞机作动系统布局
例如: 每个扰流片由1 个PCU 控制,每个副翼、襟副翼和升降舵由2 个PCU 控制,方向舵由3 个PCU 控制。PCU 主要由液压作动筒、电液伺服阀和位置反馈传感器组成,并与ACE 构成闭环控制系统。在ACE 内部有失效监控电路,如果监测某个PCU 发生故障,ACE 会切断供往受影响PCU 电磁阀的电源,将其转换为随动工作状态,其他PCU 继续工作,直到全部故障。B777 有左、中、右(L,C,R) 3 套液压系统,同一操纵面的PCU 均由不同的液压源提供压力。当1 套液压源故障时,其他PCU 可以继续工作,不会导致该操纵面失效。
同样以副翼作动系统为例分析其故障切换过程。副翼系统共有4 个相同的PCU (如图6 所示) ,每侧副翼由两个PCU 驱动,控制每个PCU 的ACE 均不同。PCU 的液压源也不同,内侧2 个PCU 用中液压,外侧2 个PCU 用左液压。每个PCU 有3 种模式: 正常模式、旁通模式和隔断/阻尼模式(如图7所示) 。
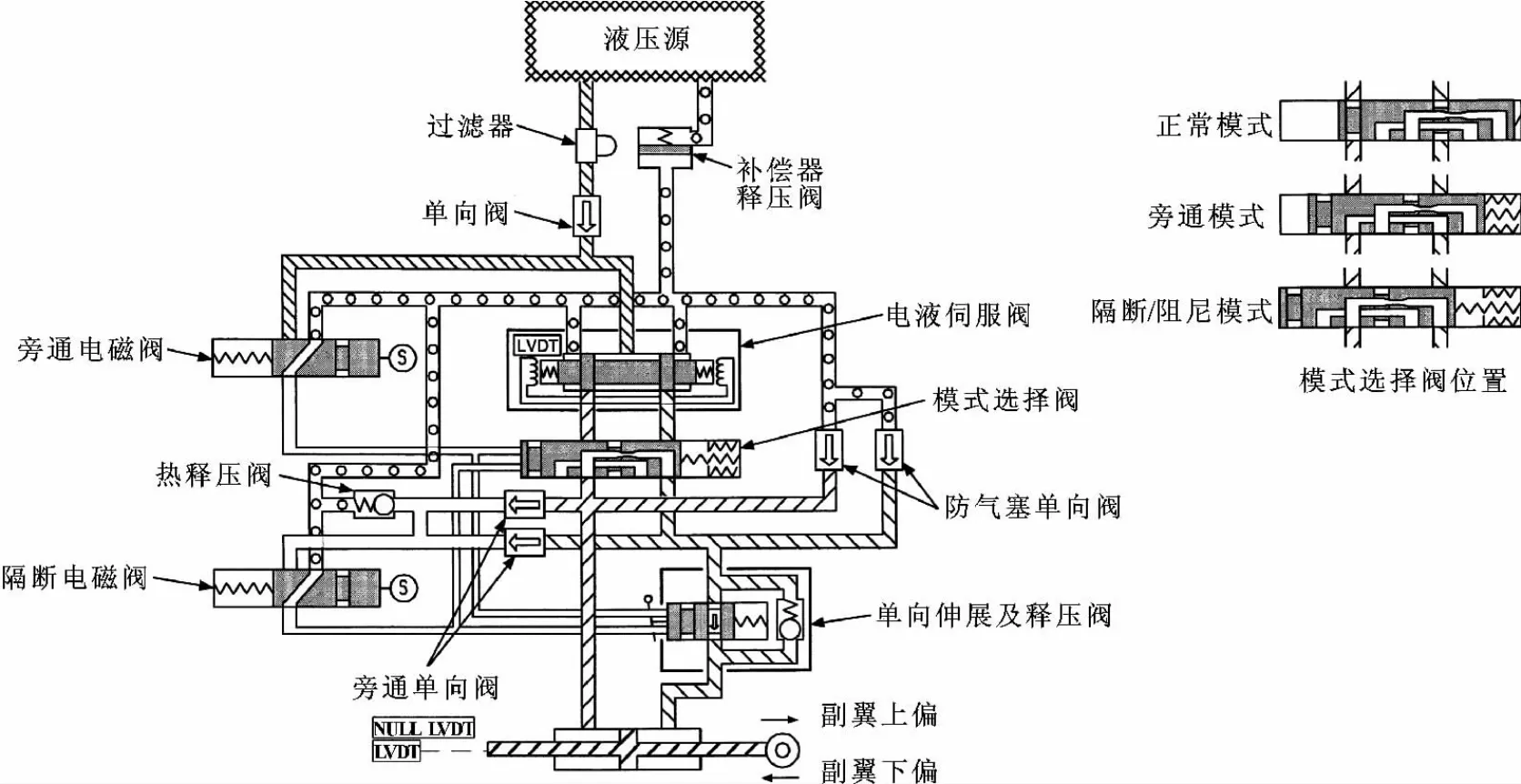
图7 B777 飞机副翼作动器原理图
当低于巡航速度飞行时,相应的ACE 控制副翼PCU 旁通电磁阀和隔断电磁阀都通电,2 个阀门打开,液压力作用在模式选择阀上,阀芯移至右边(正常模式位置) ,单向伸展及释压阀也在液压力作用下打开。在这种情况下,电液伺服阀在ACE 模拟信号控制下,利用液压力驱动作动筒伸缩,从而带动副翼偏转。当大于等于巡航速度飞行时,飞控计算机通过ACE 控制副翼锁定以保持气动外形。ACE 控制所有PCU 的旁通电磁阀通电且隔断电磁阀断电,此时PCU 处于正常模式,飞控计算机指令信号传到电液伺服阀,控制副翼保持在有利气动外形位置。
当PCU 有单一的液压或电路故障时,ACE 控制旁通电磁阀断电且隔断电磁阀通电,则旁通电磁阀打开而隔断电磁阀关断。封闭在旁通单向阀和热释压阀之间的液压力作用在模式选择阀上使其移至中间(旁通模式位置) ,同时液压力也作用在单向伸展及释压阀上使其打开。此时模式选择阀隔断从电液伺服阀过来的液压力,作动筒两个腔室的液压油经单向伸展及释压阀和模式选择阀自由流动。在这种状态下,相邻的PCU 控制副翼偏转,且带动失效的PCU 随动。
当PCU 失去电力或者飞机以大于等于巡航速度飞行时PCU 出现故障,ACE 控制旁通电磁阀和隔断电磁阀都断电,液压力不能到达模式选择阀,阀芯在内部弹簧力作用下移至左边(隔断/阻尼模式位置) ,同时单向伸展及释压阀关断。此时模式选择阀隔断从电液伺服阀过来的液压力,作动筒两个腔室的液压油经单向伸展及释压阀和模式选择阀节流孔能单向缓慢流动。在这种状态下,作动筒不能伸出,但在气动力作用下能缓慢缩入。
1.3 A320 与B777 作动系统比较
A320 和B777 飞机飞控系统均采用类似的电液伺服作动机构,电控和液动部分均采用了余度设计技术,对不同操纵面的电控逻辑和液压力布局也基本相同。除扰流板外,其他操纵面均有两个或以上的作动器,不同作动器的电控部件和液压力都独立,当一个作动器故障时,靠剩下的作动器也能保证操纵面的控制。但具体到某个作动器,两个机型存在一定差异,例如就副翼作动器来说,B777 作动器的结构和功能比A320 的要复杂。B777 飞机能保证某个副翼所有作动器全部失效时,副翼只能下偏,有利于保持机翼气动外形。
2 维修性分析
民航运输机要求高可靠性和易于维修,以尽量降低维修成本和因飞机停场维修造成的损失。就现代飞机电传飞控作动系统来说,其故障涉及机械、液压、电气和电子等多方面原因,故障关系错综复杂,一旦出现故障,飞机的易维修性具有重要意义。下面分别列举A320 和B777 飞机各一例作动系统故障进行分析。
2.1 A320 故障案例
故障现象: 某航空公司A320 飞机全天多次出现故障信息“SEC1 MON OR WIRING TO L G ELEV SOL VL V 34CE1”,提示飞控计算SEC 1 监控通道或者计算机至左绿(左内侧) 升降舵作动筒(34CE1) 电磁阀之间的线路出现故障。
开始排故过程: 首先根据手册进行侧杆控制操纵面的测试。通过头顶板断开ELAC 1、ELAC 2 和SEC2三台计算机,保留SEC 1 工作,再完成2 个测试:(1) 增压3 套液压系统,此时侧杆无法操纵升降舵;(2) 只增压蓝液压系统,此时侧杆能操纵升降舵。然后,根据排故程序进行量线,拆卸SEC1 计算机后,测量34CE1 作动筒上电磁阀(SOL VLV2) 电阻约为600 Ω (程序要求40 ~100 Ω) ,超出标准,更换此电磁阀。系统测试检查正常,排故完毕。
排故总结。与副翼作动系统相比,A320 飞机升降舵作动系统余度更高,如图2 所示,每个作动筒可以由2 台计算机控制。作动筒结构也更复杂,电控部件主要包括: 2 个电磁阀(1 个由ELAC 控制,1 个由SEC 控制) 、1 个伺服阀和2 个位置传感器。由排故结果可知,此案例是SEC 控制的左绿电磁阀故障。当进行第1 个测试时,SEC 1 会给对应的左蓝电磁阀断电使其处于主动模式,同时给左绿电磁阀通电使其处于阻尼模式,但由于该电磁阀故障不能通电,也处于主动模式。这时左升降舵两个作动筒都处于主动模式,与飞控计算机控制逻辑不符,所以无法操纵升降舵。当进行第2 个测试时,由于只增压蓝系统,此时左绿作动筒没有液压自动处于阻尼模式,不会触发故障,所以能正常操纵升降舵。
2.2 B777 故障案例
故障现象: 一架波音B777 飞机在执行作动器控制电子组件(ACE) 监控测试时,发现有信息代码为27-130007 的故障。根据故障隔离手册描述,该故障代码表示ACE-R 故障,ACE-R 控制的操纵面如图6 所示。
开始排故过程: 首先更换ACE,不能消除该故障信息,再检查与ACE 相连的ARINC629 总线,也未找到故障原因。下一步检查该ACE 控制的各操纵面的动作和指示情况。比较12 号和对称的3 号扰流板,没有发现两者动作情况有明显差别,但12 号扰流板位置指示有较大误差。查询飞行记录本时发现,大约两个月前机组曾经报告过12 号扰流板故障,可是在排故检查工作中该故障消失,系统工作正常; 通过对飞行数据记录器译码也发现,在更早的时间也出现过12 号扰流板PCU 故障。最后检查12 号扰流板PCU 的电气插头时,发现存在液压油污染问题。将插头清洁干净后,接通该系统,故障信息27-130007消失,系统工作和指示恢复正常。
排故总结: 此次B777 飞机扰流板PCU 故障是因PCU 组件液压油污染,再加上PCU 周围环境湿度太大而引起的。由于PCU 内部位置传感器的励磁线圈采用7 V/1 800 Hz 的低压高频交流电,比较容易产生高频漏电现象,在线圈受到污染和潮湿的环境下,高频漏电现象将更加严重。在这种情况下,励磁线圈的磁场强度会受到影响,使PCU 反馈给AEC 的扰流板位置信号出现误差。AEC 内部的监控电路把PCU 反馈回来的位置信号与发出的控制信号进行比较,如果发现偏差超限,就会判断为系统故障,当执行AEC监控测试时就会触发故障信息,如27-130007。
3 结论
现代民用飞机广泛采用电传飞行控制系统,计算机完成大量的飞行参数和控制规律的计算。飞控及其作动系统采用多余度设计,具有高可靠性,单一故障并不会影响飞机的控制; 系统各通道相互监控,监测到故障能进行隔离和显示,机务人员根据机载维护系统的故障信息就可以进行简单有效的维修工作。
[1]陈宗基,秦旭东,高金源.非相似余度飞控计算机[J].航空学报,2005,26(3) :320-327.
[2]王纪森,李志勇,彭博.非相似作动系统建模研究[J].机床与液压,2008,36(6) :79-81.
[3]杨菊平,陈益.民用飞机飞控计算机的现状与展望[J].航空计算技术,2007,37(5) :131-134.
[4]沈磊.民用飞机电传飞控作动系统设计与工程运用[D].上海:上海交通大学电子信息与电气工程学院,2012.
[5]侯晨光.民用飞机伺服作动系统可靠性方法研究[D].西安:西北工业大学,2007.
[6]付永领,庞尧,刘和松.非相似余度作动系统设计及工作模式分析[J].北京航空航天大学大学学报,2012,38(4) :432-437.
[7]习仁国,刘卫国,陈焕明.电静液作动器的建模仿真与试验研究[J].机床与液压,2013,41(19) :40-44.
[8]范同春,王继林,王兰普.液压油污染对波音777 飞机扰流板PCU 励磁电路的影响[J].航空维修与工程,2004(6) :49-50.
[9]严仰光,秦海鸿,龚春英,等.多电飞机与电力电子[J].南京航空航天大学学报,2014,46(1) :11-18.
猜你喜欢
现代电子技术(2022年2期)2022-02-13
智能制造(2021年4期)2021-11-04
科技与创新(2021年2期)2021-01-29
民用飞机设计与研究(2020年1期)2020-05-21
中小企业管理与科技(2019年9期)2019-05-28
西北工业大学学报(2018年4期)2018-09-07
舰船科学技术(2017年11期)2017-11-27
北京航空航天大学学报(2017年3期)2017-11-23
系统工程与电子技术(2016年11期)2016-11-11
中国科技信息(2016年14期)2016-07-31
