
旋转导向定向探管标定系统软件设计
2015-04-28 06:12彭琰举尚小峰
西安石油大学学报(自然科学版) 2015年2期
周 静,陈 冲,彭琰举,尚小峰
(西安石油大学 井下测控研究所,陕西 西安 710065)
旋转导向定向探管标定系统软件设计
周 静,陈 冲,彭琰举,尚小峰
(西安石油大学 井下测控研究所,陕西 西安 710065)
设计了一套可以提高随钻姿态测量效率和精度的数据采集系统,采用特定的标定方法对测斜探管进行综合标定。该标定系统采用VB、MATLAB、C等语言混合编程设计而成,具有实时可编程数据采集、实时曲线绘制、实时姿态测量显示、数据报表、历史数据回放等功能。具有标定姿态少、标定效率高等特点。研究分析大量的室内实验及现场试验,结果表明该系统具有精度高、稳定性好、易操作、功能全等特点,可以满足旋转导向钻井仪传感器标定需求。
随钻测井;USB接口;数据采集系统;标定方法;VB
近年来,以BakerHughes的Auto-TrakRCLS、Schlumberger的Power-DriveSRD和Halliburton的Geo-Pilot为代表的旋转导向钻井系统,在技术和商业上展开激烈的竞争[1]。国内具有代表性的钻井系统之一,西安石油大学井下测控研究所研制的旋转导向智能钻井系统XTCS(西安轨迹控制系统)属于几何导向,井眼姿态的测量就显得尤为重要[2]。井眼姿态参数是井下闭环控制的基础,是获知实际的井眼轨迹的必需参数。因此设计一套高速高精度的数据采集系统是十分重要的,能够为随钻姿态的确定提供可靠的参考和判断依据。
本文以XTCS导向工具为基础,结合GPS及地质参数、(K、Q、K+Q)系数标定校正等方法对钻进中实现准确测量井眼姿态参数的方法研究,设计一种适合工程实际要求的高速、高精度、可编程的数据采集系统。
1数据采集系统的整体架构和标定模型
XTCS数据采集系统主要由软、硬件两大部分组成。硬件部分主要由16bitA/D采集卡、信号调理模块及电源模块等构成,实现数据的采集,存储在固态存储器中,再通过MWD传输到地面[3]。软件部分实现数据的处理及保存。本文完成上位机软件部分的设计。
XTCS由上位机、下位机、传感器3部分组成。下位机进行数据采集和相关参数的简单计算,上位机进行历史比对、智能分析等复杂计算与操作。下位机固件设计成中断模式,以便于在USB上实现最大的数据传输速度,结构示意如图1所示。
定向探管标定系统常用的模型有K系数, Q系数和K+Q系数。K系统标定模型引入了温度校正,同时考虑了温度、零位偏差、同轴误差,具有较好的标定效果。Q系数标定模型,对轴不正交和不同轴的校正,没有考虑到温度系数的影响,在常温下有较好的标定效果。K+Q标定模型取K校正模型的温度补偿和Q校正的轴不正交和不同轴正交补偿,使误差得到进一步的改善。
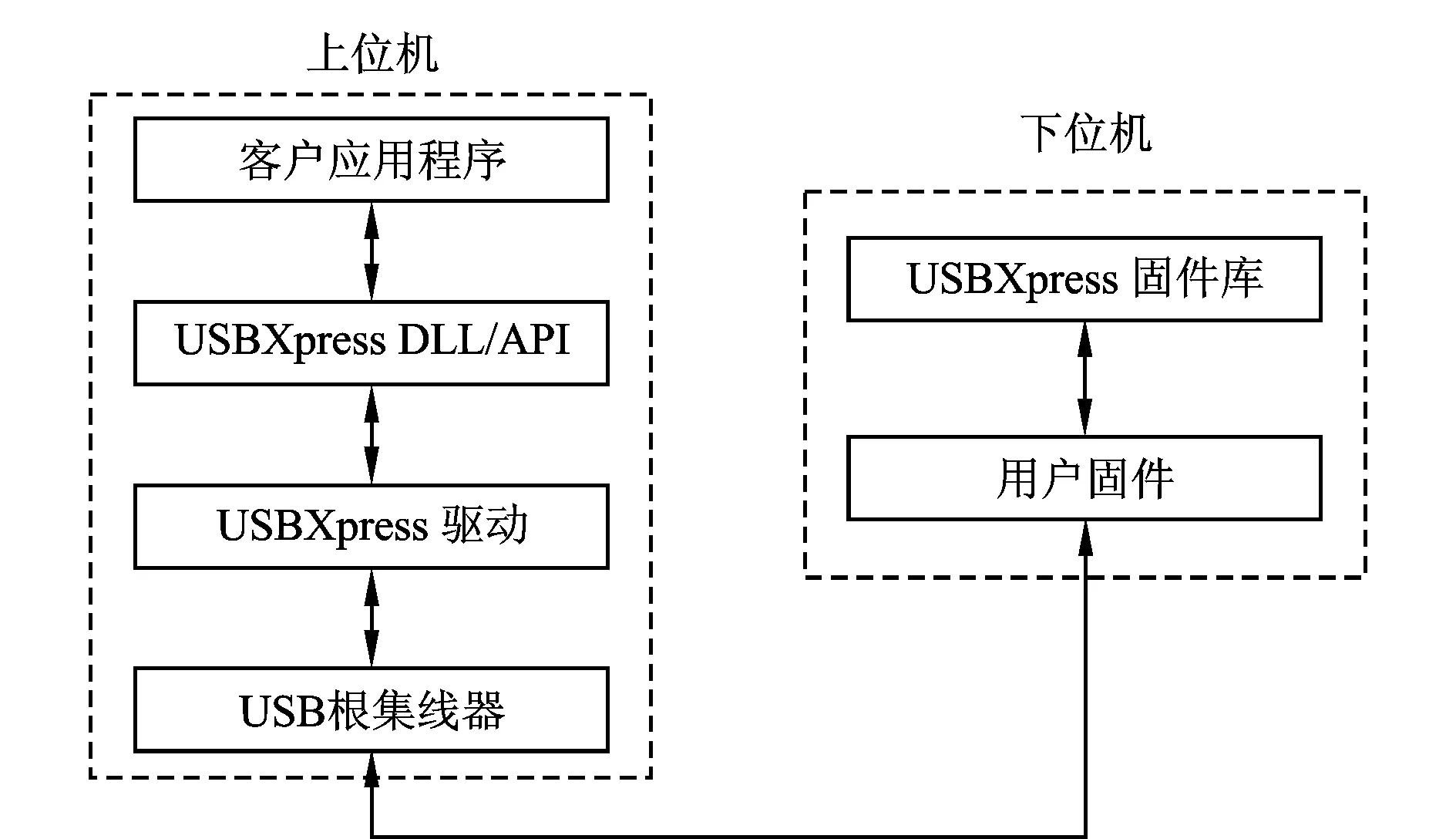
图1 USB数据流
2旋转导向钻井数据采集系统软件设计
2.1 标定模型建立
(1)K系数标定模型[4]
数据采集用到三轴重力加速度计和三轴磁通门传感器,校正模型以X轴加速度计为例介绍,其他轴类似,其数学模型为
(1)

(2)Q系数标定模型
三轴加速度计不正交校正:
(2)
三轴加速度计磁强计不同轴校正:
(3)
式(2)、(3)中,q(1)—q(9)分别为各传感器相应的q因子。
求解K系数和Q系数,使用MATLAB编译好的EXE文件和VB界面程序通过WINDOWS shell进行数据交换和处理[5-6]。
2.2 位机数据处理
从旋转导向钻井的基本原理和数学模型分析,影响测量精度的误差主要有:原理性误差、传感器线性度误差、传感器的安装误差、ADC的转换误差。
上位机数据流逻辑图如图2所示,使用7组测斜传感器测试出相关角度,由GPS提供经纬度等信息,使用IGRF模型计算出当前位置地磁参数,根据实际测试的结果和理论计算出来的结果进行对比,给出一定的误差限即可得出当前仪器的测量钻具姿态的精度。
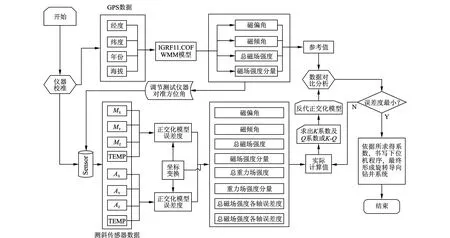
图2 上位机数据流逻辑图
2.3 软件功能设计
(1)绘图模块设计:采用专用动态绘图模块,对实时采集的数据进行曲线绘制;利用VB使用API的shell函数调用origin 8.0进行历史数据绘图[4]。
(2)通讯子程序设计:采用USB2.0进行数据传输,同时采用多端口方式与其他仪器进行数据交换,如CAN接口、RS232接口等。
(3)滤波子程序设计:采用一阶低通数字滤波,滤去随机干扰信号。
(4)数据处理及模块管理:数据库的参数包括:操作者、时间、地点、日期、温度、经度、纬度、仪器编号、海拔、K系数、K+Q系数、重力场三轴分量AX、AY、AZ、磁场分量MX、MY、MZ等重要参数和查询参数、断点参数等。对整体系统的数据流细致划分,提高了测量和标定的效率。
(5)报表的设计及打印:处理后的数据以数据集的方式,写入到EXCEL模板内。报表的打印包括测试和旋转测试数据报表打印。其中测试数据报表打印含计算后的K系统数据打印,和K+Q系统数据打印。报表的打印分为实际打印和虚拟打印,用PDF作为打印文件的电子档存储。打印程序内置了打印日期等信息。
2.4 上位机的界面设计
根据需要实现的功能,设计并完成界面。探管旋转测试界面如图3所示。系统采用VB、MATLAB、C等语言混合编程设计而成,具有实时可编程数据采集、实时曲线绘制、实时姿态测量显示、数据报表、历史数据回放等功能。
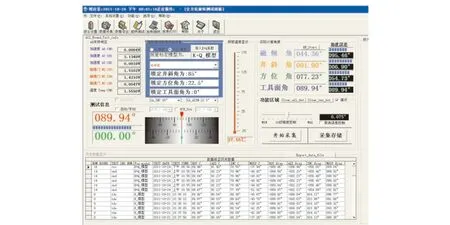
图3 探管旋转测试界面
3 旋转导向钻井数据采集系统调试及分析
3.1 导向钻井系统传感器标定
利用测斜仪确定DT814探管的空间姿态(井斜角、工具面角和相对方位角)。
(1)将方位角和井斜角固定在90°,依次调整工具面角为-6.1°、-51.1°、-96.1°、-141.1°、173.9°、128.9°、83.9°、38.9°、135°、90°、45°、0°、-45°、-90°、-135°和-180°。
(2)分别将方位角和工具面角固定在0°;方位角固定在0°,工具面角固定在90°两种情况下,分别依次调整井斜角为-6.1°、-51.1°、-96.1°、-141.1°、173.9°、128.9°、83.9°、38.9°、135°、90°、45°、0°、-45°、-90°、-135°和-180°。
通过上述组合一共得到48个DT814探管的空间姿态,探管姿态稳定后,分别进行数据采集记录,采用多组数据求平均的方法,力求得到最接近真实值的测量值。本系统实现5个温度梯度进行数据采集,共得到240组数据。
3.2 探管测试数据分析
图4为室温下实际测试所得的各轴传感器电压输出曲线,可以从图中明显看出传感器的输出值符合实验设计预期结果,即在锁定井斜角和方位角为90 °时,测试工具面角,AZ轴零或在零值附近摆动,这是由于安装误差导致的旋转轴和传感器轴不同轴的原因造成的,经过软件校正可以消除这种误差。从图5曲线来看,所采得的电压数据较为理想,相较于磁通门,加速度计的线性度更好。
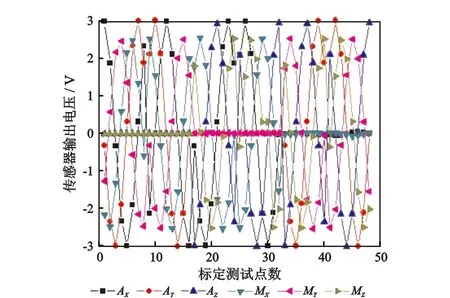
图4 各轴传感器电压输出曲线

图5 5个温度梯度下AX和MX输出曲线
3.3 系统调试及误差分析
用K+Q系数标定模型得到的井斜角和工具面角实际计算角度与理论值的绝对误差曲线如图6—图9所示。
综合上面的拟合曲线图和误差曲线图,排除测量时由于人为因素导致的坏点,即相比较误差太大的点,可以得出如下结论:
(1)从图6可以看出,拟合曲线基本呈线性关系,通过算法校正的工具面角和标准工具面角线性比例为0.997 22,接近于1,两者误差较小,算法校

图6 Q因子校正后工具面角曲线
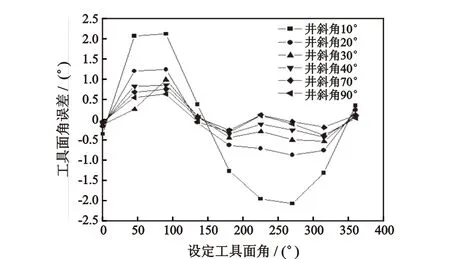
图7 Q因子校正后工具面角测量误差
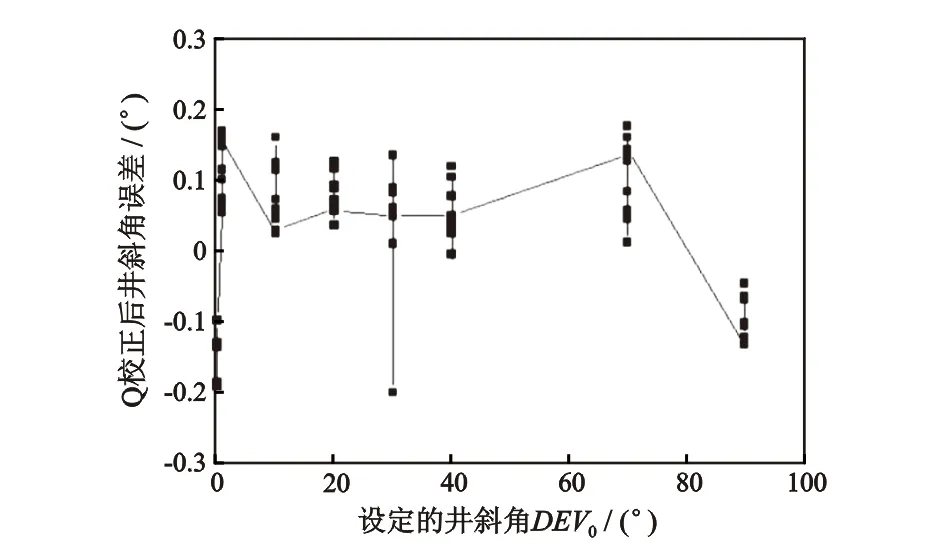
图8 Q因子校正后井斜角曲线

图9 Q因子校正后井斜角测量误差
正精度高,能达到校正井斜的目的。对图8的分析与之类似。(2)从误差曲线图上分析发现,如图7,井斜角<10°的时候,K系数校正后的工具面角的误差<±2°;在井斜角大于10°时,除坏点外,K系数校正后的工具面角的绝对误差基本<±1°。误差达到预想的指标。如图9,对井斜角进行系数校正后,绝对误差值基本上在0.2之内,误差明显小于未校正前的误差。误差达到预想的指标。目前这套系统正在CPL随钻中心测试完善中。
4 结束语
该系统软件界面友好、操作方便简单、功能齐全,能充分满足使用要求。采用了GPS和IGRF模型通过理论计算得出地磁参数,使用K系数模型和K+Q系数模型对测斜探管进行综合标定。通过大量的实验室数据模拟和工业现场测调试、测试分析,可以得出该套采集系统具有较高的精度、较好的可靠性和稳定性,无论从硬件到软件的设计可以较好的满足工业探管标定需求,提高了探管的标定效率。
[1] 姜伟,蒋世全,付鑫生,等.旋转导向钻井技术应用研究及其进展[J].天然气工业,2013,33(4):75-79. JIANG Wei,JIANG Shi-quan,FU Xin-sheng,et al.Application of rotary steering drilling technology and its research progress[J].Natural Gas Industry,2013,33(4):75-79.
[2] 周静,尚海燕,雷景辉,等.旋转导向闭环钻井中的测斜系统[J].石油仪器,2000,14(3):1-5.
[3] 刘树坤,汪勤学,梁占良,等.国内外随钻测量技术简介及发展前景展望[J].录井工程,2008,19(4):32-37,41. LIU Shu-kun,WANG Qin-xue,LIANG Zhan-liang,et al.Introduction and development prospect of MWD technique at home and abroad[J].Mud Logging Engineering,2008,19(4):32-37,41.
[4] 周静,胡毅,付浩.三轴重力加速度传感器标定方法研究[J].石油仪器,2010,24(4):44-46. ZHOU Jing,HU Yi,FU Hao.Calibration method for three-axis gravity acceleration sensor[J].Petroleum Instruments,2010,24(4):44-46.
[5] 刘渊.误差理论与数据处理[D].大连:大连理工大学,2009.
[6] 丁旭东,周静,李炳建.基于MATLAB GUI的钻井工具姿态采集处理系统[J].电子测试,2008(6):5-8. DING Xu-dong,ZHOU Jing,LI Bing-jian.Drilling tools posture acquisition andprocessing system based on Matlab GUI[J].Electronic Test,2008(6):5-8.
责任编辑:张新宝
2014-10-16
国家科技重大专项“大型油田及煤层气开发”(编号:2011ZX05021-005);中石油集团公司重大专项“钻井新装备新工具研制”之“随钻测量与传输装备研制”(编号:2014B-4313)
周静(1964-),女,教授,主要从事旋转导向智能钻井系统的研究。E-mail:jzhou@xsyu.edu.cn
1673-064X(2015)02-0103-04
TE928
A
猜你喜欢
中学生数理化(高中版.高考数学)(2022年2期)2022-04-26
中学生数理化·高三版(2022年2期)2022-03-30
中学生理科应试(2021年10期)2021-12-07
广东教育·高中(2021年11期)2021-12-01
云南化工(2020年11期)2021-01-14
中国典型病例大全(2021年15期)2021-01-10
河北理科教学研究(2020年2期)2020-09-11
汽车维修与保养(2020年11期)2020-06-09
智富时代(2019年2期)2019-04-18
智富时代(2019年2期)2019-04-18
