一种车辆横摆率控制参数整定的新方法
2015-04-29 12:23侯满哲孙冰心王月亭
河北建筑工程学院学报 2015年1期
侯满哲 马 宏 孙冰心 王月亭
(河北建筑工程学院,河北 张家口075000)
在生活中对车辆的主动安全控制越来越受到人们的关注,为使车辆横摆率达到跟踪控制的目的,很多控制算法开始被应用,其中包括PID控制[1]、滑模控制[2]、鲁棒控制[3]等.PID控制是一种在自动控制领域有着很广泛应用的控制方法[4].但PID控制的参数整定却始终是一个难点.PID控制参数的整定方法有很多,比如ziegler和Nichols提出的ZN整定方法[5],ZN方法虽然便于实际应用,但有时其参数整定的效果并不完美.其他的PID控制参数整定方法也经常因被控对象在现实生活中的精确模型很难建立的而较难实现.
本文运用ADAMS软件建立车辆动力学模型来实现车辆动力学仿真,由径向基函数理论,以车辆前轮转向角幅值、PID参数为代理模型输入,以ADAMS车辆动力学横摆率响应曲线的关键点为代理模型输出,获得集成PID控制器的车辆横摆率响应代理模型.以最小化横摆率响应值与期望值的误差为优化目标函数,基于遗传算法实现PID控制参数整定.仿真结果表明,应用本文提出的方法建立的车辆横摆率响应代理模型精度较高,且整定的PID控制器参数具有较好的控制效果.
1 车辆动力学模型的建立
1.1 ADAMS车辆动力学模型
本文以某轿车为研究对象,利用ADAMS/Car依次建立了前、后悬架系统,转向系统,动力总成系统,前轮、后轮、车身、制动等子系统,并最终装配成整车仿真模型[6].其中,车辆前后悬架均采用麦弗逊式独立悬架,转向系统采用齿轮——齿条转向器,轮胎模型选用Fiala轮胎模型,动力系统、制动系统和车身模型均采用ADAMS/Car自带的模块进行装配.其中制动系统采用前后盘式制动器.装配完成后的整车模型如图1所示,其中共有98个自由度.
1.2 期望模型
车辆前轮转角和纵向速度同车辆在转向时的期望横摆率的关系,可表示为[7]:

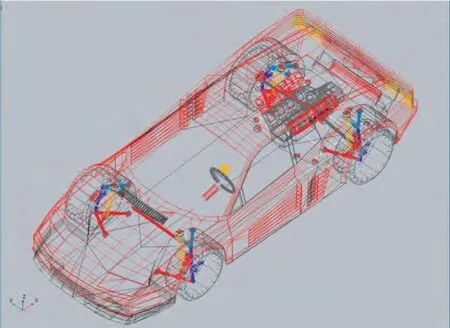
图1 ADAMS车辆模型
由于轮胎横向力极限的存在,横向加速度不能超过最大附着系数,因此横摆率极限可表示为[8]:

式中,μ表示路面附着系数,g为重力加速度.
1.3 PID控制器
为实现对期望横摆率的控制,PID控制器对横摆率响应值和期望值的误差信号e(t)进行比例、积分和微分运算,算出以直接横摆转矩为控制器输出的u(t).PID控制器表示为:

式中,Kp、Ki和Kd分别为PID控制器的比例、积分和微分控制参数.
1.4 联合仿真输入、输出变量的选取
ADAMS虽然在建模方面功能强大,但是其在控制方面不能建立复杂的控制系统.因此需要选用在控制方面功能强大的MATLAB/simulink模块与ADAMS组成联合仿真.两者在进行联合仿真前,需要ADAMS/controls模块选取输入、输出变量之后才能实现[9].本文研究的控制量为车辆的横摆角速度,因此需要添加车辆四个车轮的制动力矩来产生补偿横摆力矩,从而实现对汽车横摆角速度的控制.如图2所示,选取ADAMS车辆模型中的左前轮制动力矩、左后轮制动力矩、右前轮制动力矩、右后轮制动力矩为输入变量,汽车模型中质心处的横摆率为输出变量.ADAMS/Car的车辆模型与MATLAB/simulink控制系统的连接如图3所示.
2 横摆率响应代理模型
2.1 径向基函数代理模型
径向基函数(Radial Basis Function,RBF)是一类以待测点与样本点之间的欧氏距离为自变量的函数.
径向基函数的基本形式如下[10]:

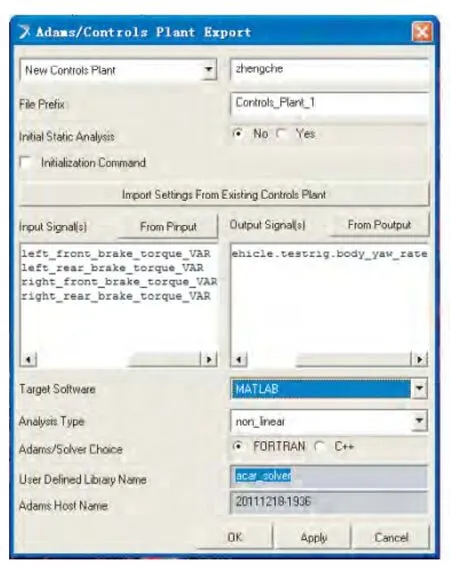
图2 ADAMS输入输出设置
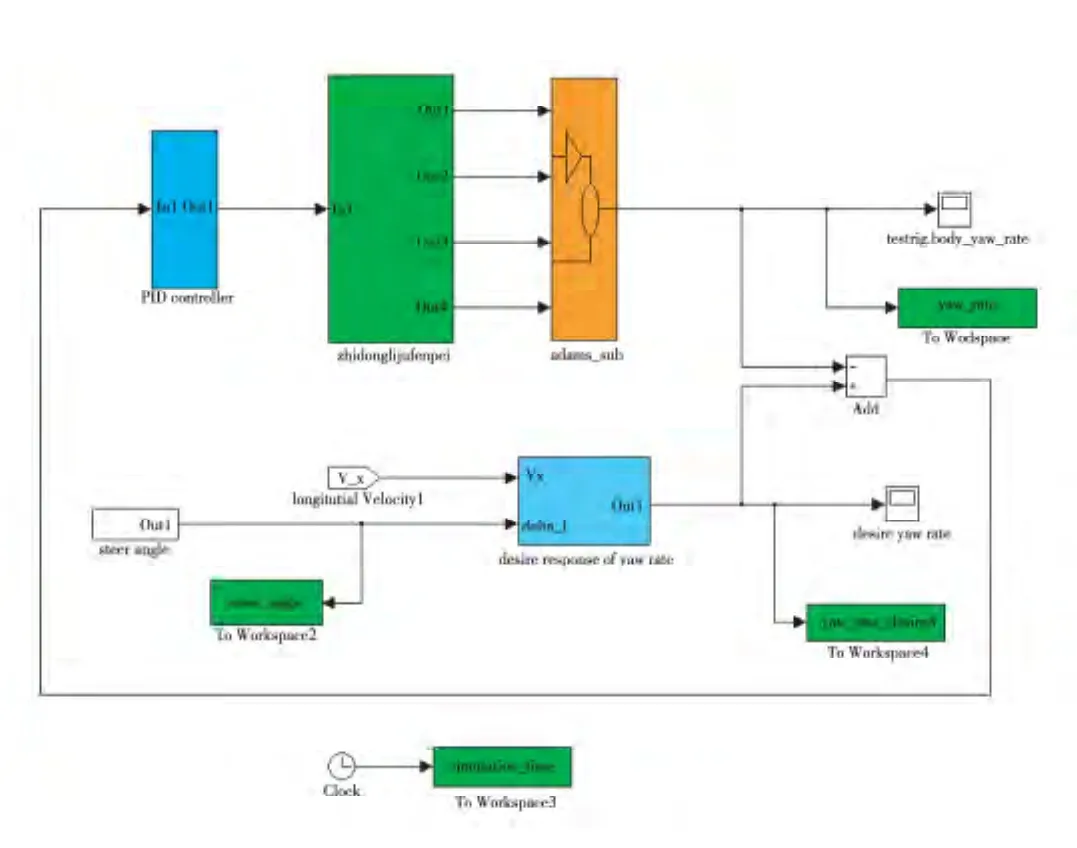
图3 联合仿真的SIMULINK连接图

用(10)式作为预测模型时,它要满足如下的插值条件:

其中,本文中的核函数为高斯函数[11].

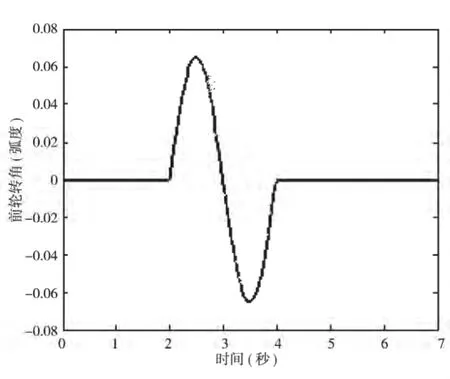
图4 幅值为0.07时前轮转向角δ的输入曲线
2.2 代理模型的建立
鉴于本文中的ADAMS车辆动力学模型的输出响应不但和自身参数有关,而且还与系统前一个甚至几个状态有关,因此若是直接用某一时刻的输入和输出响应建立代理模型模型的话,代理模型的精度很难保障.为了避免考虑系统响应与时间状态相关的这个问题,本文以车辆横摆率曲线的关键点为输出响应,采取一种新的代理模型建立方法.
参考美国高速公路交通安全局(NHTSA)的法律规定,单移线试验是一种评价车辆操控性能的重要试验方法.在本文中,试验过程中的车辆前轮转向角输入如图4所示[12].对ADAMS车辆模型进行仿真以获得车辆横摆率响应.车辆以120km/h的恒定速度行驶在水平路面上,仿真时间设定为7秒.如图4所示,前轮转向角为第2秒开始,以周期T=2秒,幅值δ∈ [0,0.07]弧度的正弦波.4个代理模型输入参数δm、Kp、Ki、Kd的取值范围如表1所示,其中Kp、Ki、Kd3个输入变量已采用试探法对取值范围进行了适当缩小.
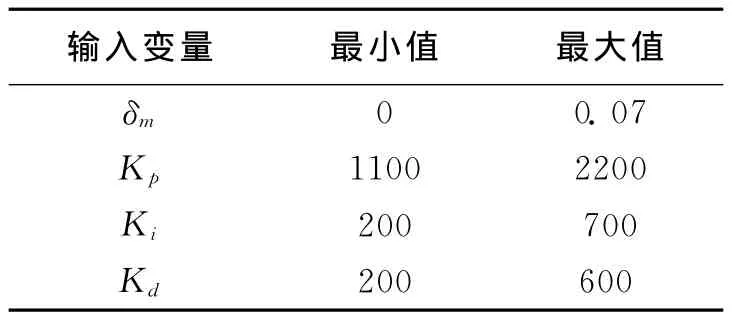
表1 代理模型输入变量范围
在表1输入变量范围内运用拉丁超立方采样方法[13]选取20组试验点进行试验,得到20次试验中每次试验输出的横摆率响应曲线.如图5所示,本文定义响应曲线的关键点为第一次零点出现位置(点1),最大值点出现位置(点2),第二次零点出现位置(点3),最小值点出现位置(点4),第三次零点出现位置(点5).对于响应曲线中没有全部关键点的曲线直接剔除,如图5中的红线.由于这些没有明显关键点的曲线和期望曲线差距太大,而控制系统的目的是要跟踪期望曲线,因此剔除这些曲线不失一般性.对试验结果进行筛选,得到17组具有关键点的横摆率输出响应.通过对得到的17组横摆率响应曲线对比得知,每组输出曲线在第一次零点出现时刻和最大值出现时刻基本相同,故不建立这两种代理模型.以δm、Kp、Ki、Kd为代理模型输入,分别以响应曲线的最大值Xmax、最小值Xmin、第二次零点出现时刻X02、最小值出现时刻Xmint、第三次零点出现时刻X03为代理模型输出,共建立5个代理模型.设计变量拉丁超立方抽样及响应值表如表2所示.

表2 代理模型设计变量拉丁超立方抽样及响应值
径向基函数代理模型建立完毕后,对代理模型进行精度校核,选取满足输入变量条件但未作为试验点的输入输出数据进行代理模型精度验证.具体做法是:先将一组输入数据代入ADAMS仿真模型里,获得车辆横摆率响应曲线的关键点位置,定义为仿真值;然后将这一组输入数据代入径向基函数代理模型中,得到代理模型输出的关键点位置,定义为拟合值;分析前后得的两组关键点数据,计算相对误差.如表3所示进行3次验证,代理模型的误差均控制在5%以内,从而可知代理模型精度满足要求,可以用来构造目标函数.
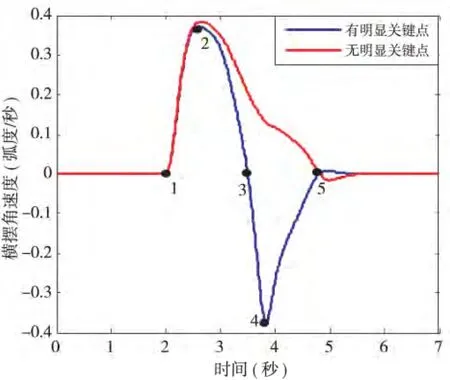
图5 具有明显关键点的横摆率输出曲线
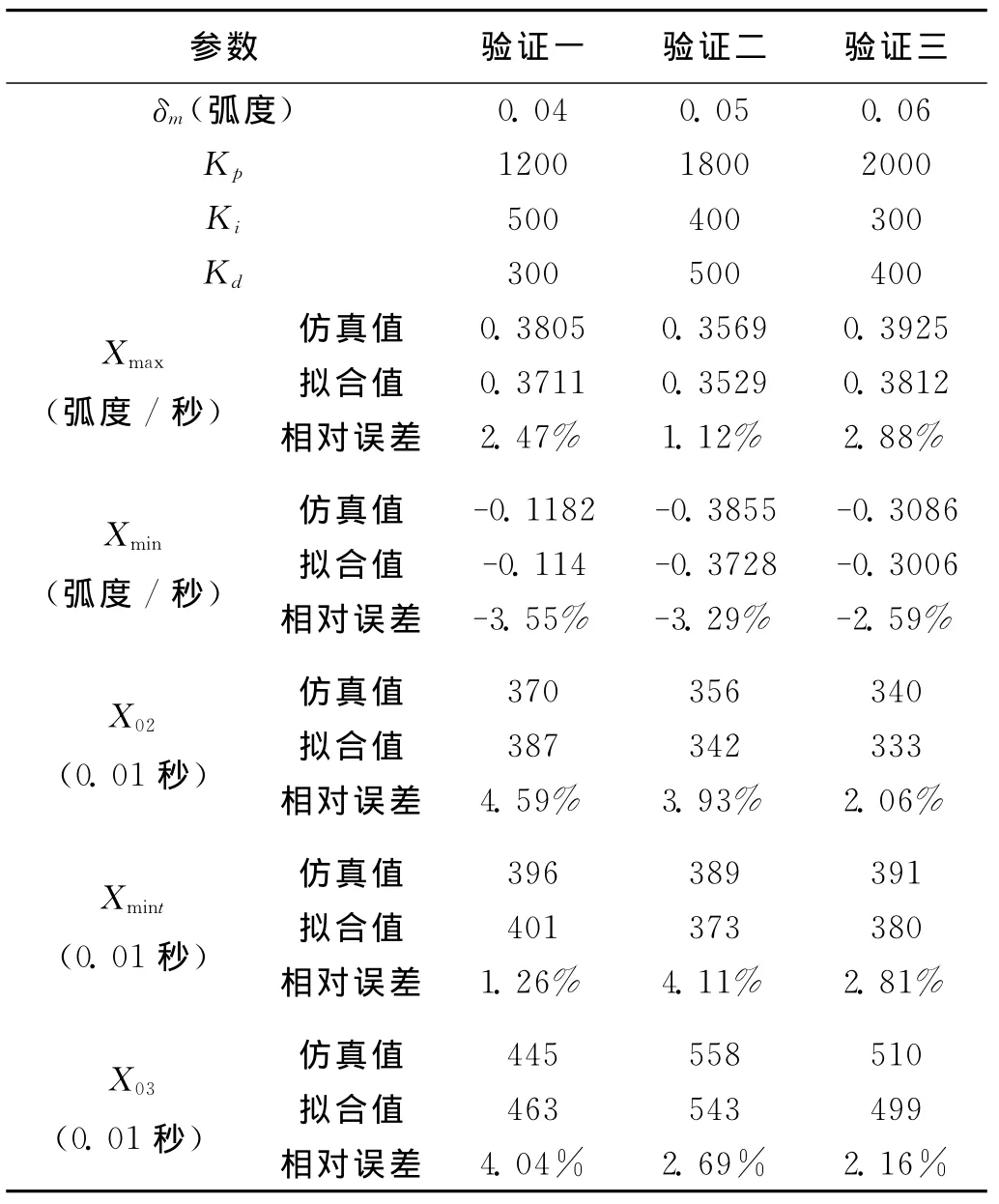
表3 代理模型精度验证
3 PID控制器参数整定
以前轮转向角幅值δm为代理模型的输入,响应曲线的期望最大值Ymax、期望最小值Ymin、第二次零点出现的期望时刻Y02、最低值出现的期望时刻Ymint、第三次零点出现的期望时刻Y03为输出响应,再次利用本文提出的基于关键点建立代理模型的方法,建立式(1)和式(2)所表示的期望模型的代理模型.由于期望模型不受Kp、Ki、Kd影响,因此建立期望模型的代理模型时只需考虑前轮转向角幅值δm一个输入.
由于PID控制的目标是使实际响应的关键点逼近期望响应的关键点,所以目标函数为:
式中,w1,w2,w3,w4,w5为 权 值.PID参 数Kp、Ki、Kd取值范围如表1所示.选取δm为0.065,预设权值w1和w2为1,w3、w4,w5为10-8.权值首先保证五个评价指标方差的数量级相同,Xmax和Xmin分别代表横摆率响应曲线最大、最小值且量纲相同,设定为1.X02、Xmint和X03分别代表横摆率响应曲线第二次零点出现时刻、最小值出现时刻、第三次零点出现时刻,单位为0.01秒,数值相对横摆率为10000.因此设定w1=w2=1,w3=w4=w5=10-8;其次权值包含了对评价指标的偏好程度,文中五个评价指标处于相同的偏好程度,因此预设的权值不变.
使用遗传算法对目标函数进行优化,流程图如图6所示.遗传算法是一种从种群到种群的全局搜索方法,本文中优化模型设定种群数为20.判定遗传算法停止程序的条件有两种,一种为达到设定的最大进化代数(本文中预设100代);另一种为连续3代最优值相同时即认为达到全局最优点.本文在进行目标函数优化时,在第77、78、79连续3代最优值相同,所以判定此时目标函数最小.优化结果为:Kp=2144.26,Ki=369.64,Kd=360.95.
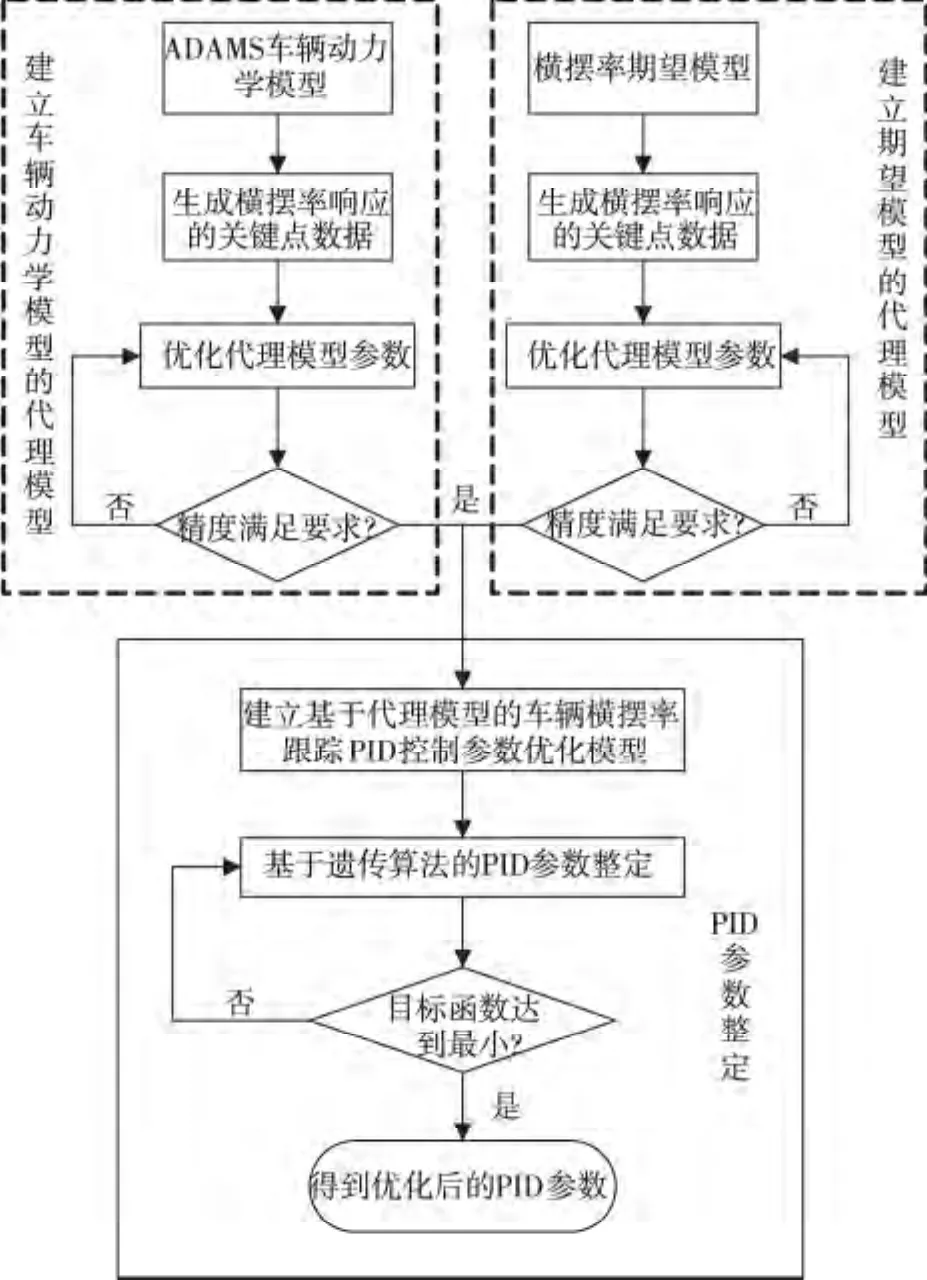
图6 基于代理模型的车辆横摆率跟踪PID参数优化流程图
将优化后的PID参数代入本文建立的ADAMS车辆模型进行验证,得到的横摆率响应曲线如图7所示.从图中可以发现,对PID参数运用本文的方法优化整定后,横摆率响应曲线对期望横摆率响应曲线的跟踪效果更好.此外,在相同条件下,运用simulink中的自动优化模块对ADAMS车辆模型进行PID参数优化整定,由于本文的ADAMS车辆模型较为复杂,运行一遍仿真过程需花费较长时间,软件进行优化时需要反复调用程序,因此得到优化结果所耗费的时间长达6小时15分20秒,而用本文基于代理模型的方法进行PID参数优化整定,所用时间仅为51秒就能得到与软件自动优化几乎相同的结果.当问题规模较大时,同样可以利用遗传算法快速整定出PID参数.因为本文是基于代理模型的优化,问题规模较大时会增大代理模型的构造难度,但代理模型一旦构造成功,优化过程仅仅是对于代理模型的优化,不需要反复地调用仿真程序进行迭代优化.由此可以看出本文提出的参数整定方法在效率上拥有一定优势.
当针对不同的前轮转向角输入建立与之对应的代理模型时,虽然所定义的横摆率曲线的关键点在物理意义、数量和位置等方面有差别,但其基本原理和方法根本一致,因此本文提出的方法具有一定的通用性,可适用于其他的转向工况.
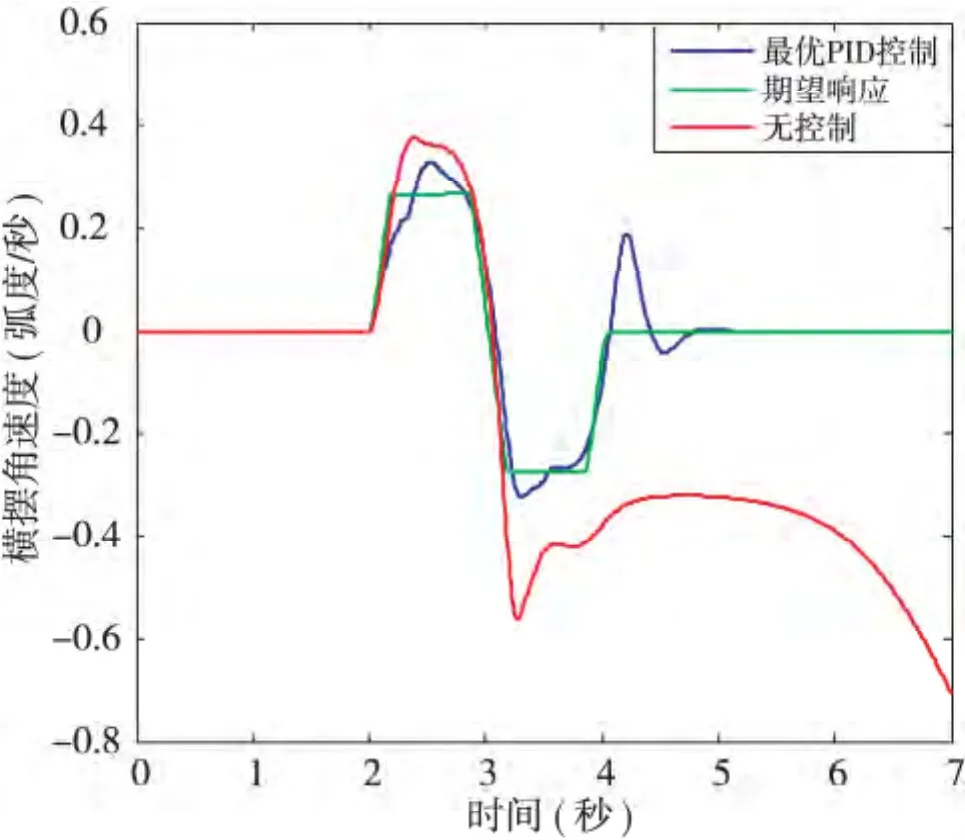
图7 优化后的PID控制横摆率输出曲线
4 结 论
本文通过对ADAMS车辆动力学模型的横摆率响应曲线的关键点建立代理模型,构造出目标函数进行优化,从而快速地优化出所需的PID参数.由仿真试验结果可知,这种参数整定方法对响应曲线的关键点位置拟合较为精确,能有有效地提高PID参数整定的效率,进而为高度非线性且与时间状态相关的系统提供了一种新的参数整定方法.
[1]王靖岳,王浩天,张勇.基于模糊PID控制的汽车主动悬架研究[J].机械科学与技术,2009,28(8):1047~1051
[2]朱天军,宗长富,李飞,等.基于线性矩阵不等式的重型车辆防侧翻鲁棒控制算法研究[J].汽车工程,2012,34(5):394~398
[3赵艳娥,张建武.基于滑模控制的四轮驱动电动汽车稳定性控制[J].上海交通大学学报.2009,43(10):1526~1530
[4]王亚刚,许晓鸣,邵惠鹤.基于Ziegler-Nichols频率响应方法的自适应PID控制[J].控制工程.2012,19(4):607~613[5]Ziegler J G,Niehols N B.Optimum settings for automatic controllers[J].1942,64(8):759~768
[6]黄志刚,王丰,朱慧,等ADAMS/Car在汽车操纵稳定性仿真中的应用[J].计算机仿真.2010,27(5),344~347
[7]Kim C J,Jang J H,Oh S K,et al.Development of a control algorithm for a rack-actuating steer-by-wire system using road information feedback.Journal of Automobile Engineering[J].2008,222(9):1559~1571
[8]Rajamani R.Vehicle Dynamics and Control.Springer[M],New York,2006
[9]李婷.基于ADAMS的汽车电动助力转向系统的控制与仿真[D].东北大学,2009
[10]Dale,B.,McDonald,Walter,Grantham,J.,Wayne Tabor,L.Global and local optimization using radial basis function response surface models[J].Applied Mathematical Modelling,2007,(31):2095~2110
[11]Kansa,E.J.&Hon,Y.C.Circumventing the Conditioning problem with Multiquadric radial basis functions:Applications to elliptic partial differential equations[J].Computers and Mathematics with Applications,2000,(39):123~137
[12]Yang X,Wang Z and Peng W.Coordinated control of AFS and DYC for vehicle handling and stability based on optimal guaranteed cost theory[J].Vehicle System Dynamics,2009,47(1):57~79
[13]邓乾旺,文文.基于拉丁超立方抽样的薄板装配误差分析[J].中国机械工程,2012,23(8):947~950
猜你喜欢
中学生数理化·中考版(2022年12期)2022-02-16
今日农业(2021年8期)2021-11-28
小学生学习指导·爆笑校园(2019年6期)2019-09-10
趣味(数学)(2018年12期)2018-12-29
现代营销(创富信息版)(2018年8期)2018-09-08
红蜻蜓·低年级(2015年11期)2016-02-02
中国卫生(2014年2期)2014-11-12
中国自行车·骑行风尚(2014年4期)2014-10-10
中国火炬(2014年1期)2014-07-24
语文知识(2014年7期)2014-02-28