低成本SINS/GPS组合导航系统的研究*
2015-05-05 06:35张文孙瑞胜
现代防御技术 2015年3期
张文,孙瑞胜
(南京理工大学 a.泰州科技学院,江苏 泰州 225300; b.动力工程学院,江苏 南京 210094)

低成本SINS/GPS组合导航系统的研究*
张文a,孙瑞胜b
(南京理工大学 a.泰州科技学院,江苏 泰州 225300; b.动力工程学院,江苏 南京 210094)
以简易制导航弹为对象,进行了低成本组合导航系统的研究。惯性导航系统具有体积小,功耗低等特点,但定位误差随时间积累,所以长期稳定性比较差。目前应用最多的卫星导航是美国的GPS,GPS具有良好的长期稳定性,但使用受制于美国政府,而且它的动态定位性能比较差以及更新率比较低。将两者结合起来,建立了适合工程应用的低成本SINS/GPS组合导航系统,应用自适应卡尔曼滤波技术实现数据的融合,并对系统进行了动态跑车试验,试验结果表明,该组合导航系统提高了导航精度。此方案具有较好的工程应用价值。
捷联惯性导航系统;全球定位系统;组合导航系统;卡尔曼滤波
0 引言
为了使得飞行器按照指定的轨道运行,现在有多种导航设备可供使用,如惯性导航系统(inertial navigation system,INS),全球定位系统(global positioning system,GPS),北斗导航系统等。这些导航设备都具有各自的特点。惯性导航系统依靠自身的传感器完成导航任务,具有价格低,功耗低,环境适应能力强等优点,但是它的误差随时间积累,以致导航精度随时间发散,在需要长时间定位的时候,不能够满足导航的要求。以GPS为代表的卫星定位系统则没有这个问题,具有很好的定位精度。但是,其抗干扰能力较差。如果将惯性导航系统与卫星定位系统相结合,两者取长补短,可以提高导航系统的长期精度,降低成本。目前,SINS(strapdown INS)/GPS组合导航是导航领域研究的热点,本文设计了一种适合于工程应用的低成本SINS/GPS组合导航系统。并对该系统的导航定位性能进行了实验测试。
1 组合导航原理
1.1 SINS/GPS组合导航原理
捷联惯导是将敏感器件安装在载体上,利用陀螺仪测量载体的角速率,计算出姿态矩阵,确定载体的姿态和航向信息。特点是成本低,自主性和实时性好,但导航定位的误差会随时间推移而增长,难以长期独立工作。另一方面, 对一般惯性导航系统而言, 加温和初始对准也需要一定的时间。在这种情况下, 远距离、高精度的导航和其他特定条件下的快速反应等性能要求, 就成了惯导系统比较难解决的问题。因而纯惯导系统对陀螺仪有很高的要求,一般情况下,陀螺具有0.002~0.01(°)/h的精度才能够完成导航任务,所以纯惯导系统的成本很高[1]。GPS卫星提供的导航电文可以实时提供载体的位置、运动速度等导航信息,具有精度高,成本低的优点,但其抗干扰能力差以及更新率比较低,利用GPS测量出来的位置、速度信息与惯导系统测量的载体的位置、速度信息的差值作为量测值,并以此对惯导系统的误差进行修正,将两者进行结合,相互取长补短,可以使综合后的系统导航精度高于2个系统单独工作的精度[2]。国内一些研究单位都对组合导航系统展开了大量有针对性的研究工作,并取得一定成果,如:北京航天时代光电科技有限公司针对某型无人机的应用特点,利用低成本硅微MEMS陀螺仪与加速度计以及GPS信号实现了导航定位功能,组合定位误差小于15 m,速度误差小于0.6 m/s[2]。文献[3]中介绍的组合导航系统在静态条件下, 位置精度可达到5 m( 标准差) , 速度精度优于0.1 m/s。
导航原理如图1所示。
1.2 组合导航系统模型
本文结合弹载导航系统的整体精度要求,在满足导航精度的前提下,提出了一个适合于工程应用的简化模型[4]。选取了简单的位置、速度组合模式,组合系统的数学模型分为2部分:一是系统状态方程,其状态量为惯导系统的误差,包括导航信息误差和惯性器件误差,共18个状态量;二是系统的量测方程,利用GPS和SINS给出的位置,速度差作为量测值[5-6]。组合导航系统的状态方程:
(1)

图1 卡尔曼组合导航原理图Fig.1 Principle of the Kalman integrated navigation
XI=(φe,φn,φu,δve,δvn,δvu,δφ,δλ,δh,εbx,εby,εbz,εrx,εry,εrz,▽ax,▽ay,▽az),
式中:φe,φn,φu为惯导系统的3个失准角;δve,δvn,δvu为东向、北向、天向的速度误差;δφ,δλ,δh为纬度、经度、高度的误差;εbx,εby,εbz为陀螺仪三维方向的常值漂移;εrx,εry,εrz为一阶马尔可夫过程漂移;▽ax,▽av,▽az为加速度计在三维方向的一阶马尔可夫过程漂移。
采用位置、速度组合时,有2组观测值,一组是位置观测值,即惯导系统给出的经纬度和高度信息与GPS给出的相应信息的差值,而惯导系统和GPS给出的位置差值作为另一组观测值[7]。惯导和GPS的位置信息可分别表示为
(2)
式中:RM是地球参考椭球子午圈上各点的曲率半径;RN是地球参考椭球卯酉圈上各点的曲率半径;λt,φt,ht分别为经度,纬度和高度值;NE,NN,NU为GPS接收机沿东、北、天方向的位置误差,作白噪声处理。
速度信息可分别表示为
(3)
式中:ME,MN,MU分别对应GPS接收机沿东、北、天方向的测速误差,同样作白噪声处理。则惯导系统的位置及速度信息与GPS位置及速度信息的差值为
定义系统的量测方程为
H(t)X(t)+N(t),
(4)
式中:
N(t)=(NN,NE,NU,ME,MN,MU)T.
2 Kalman滤波方程[8-11]
将系统的状态方程和量测方程进行离散化,得下列公式:

(5)
Kalman滤波方程为
(6)
(7)
(8)
(9)
(10)
3 扩展卡尔曼滤波
卡尔曼滤波针对的是线性系统,可以对目标作出最优的估计,而实际生活应用中,大部分的对象都是非线性的,针对非线性系统对卡尔曼滤波进行了改进即扩展卡尔曼滤波(extended Kalman filter,EKF),将非线性函数的局部进行线性化,然后再进行卡尔曼滤波,完成滤波跟踪[12-13]。假设系统的状态空间方程如下:
X(k)=f(X(k))+W(k-1),
(11)
Y(k)=h(X(k))+V(k).
(12)
将式(11),(12)作一阶Taylor级数展开并略去二次以上项,得到线性化的方程,
(13)

(14)


(15)
状态误差协方差矩阵为
(16)
EKF的滤波方程为

(17)
(18)
(19)

(20)
设定状态向量和估计误差矩阵的初始值X(0)和P(0),就可以利用EKF的滤波方程进行状态估计。本系统将Kalman滤波和EKF这2种算法都进行了测试并进行了比较。
4 试验结果及分析
设置系统的参数及初始条件,陀螺白噪声漂移为50 (°)/h,陀螺一阶马尔可夫漂移为10 (°)/h,加速度计一阶马尔可夫漂移为5 mg,相关时间3 600 s。水平位置误差为10 m,高度误差为20 m, 水平速度误差为0.2 m/s,方位速度误差为0.3 m/s,经纬度误差为0.001°,高度误差为10 m,速度误差为0.5 m/s。
软件编制和系统调试之后,选取了下面一段路线,对该组合导航系统进行跑车验证,为比较2种算法, 取了4个点进行了比较, 得到的曲线分别如图2,3所示。

图2 组合导航系统航迹图及测试点(KF方法)Fig.2 Track of integrated navigation system and test points (method of KF)

图3 组合导航系统航迹图及测试点(EKF方法)Fig.3 Track of integrated navigation system and test points (method of EKF)
从绘制曲线上可以看出,采用KF滤波精度要低于采用EKF。同时,KF在点4上还出现了发散的情况,这种发散点的产生是随机的,不能用于导航。在进行数据分析时,不应该包含这些发散的点。将这些不合理的数据剔除后对测量数据进行了误差分析计算,表1,2分别是采用2种滤波方法在纬度和精度方向上所产生的平均误差,可以看出采用EKF滤波的时候精度要明显高于KF。
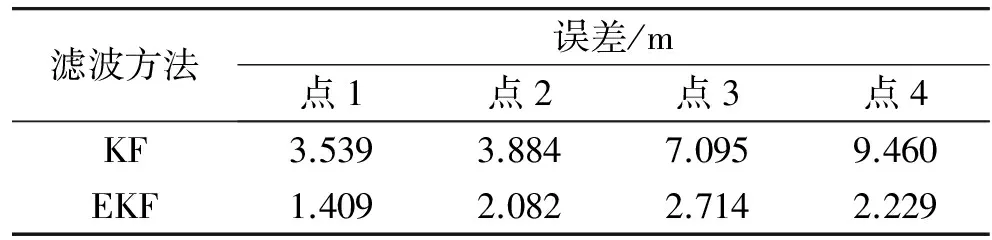
表1 纬度误差Table 1 Longitude error
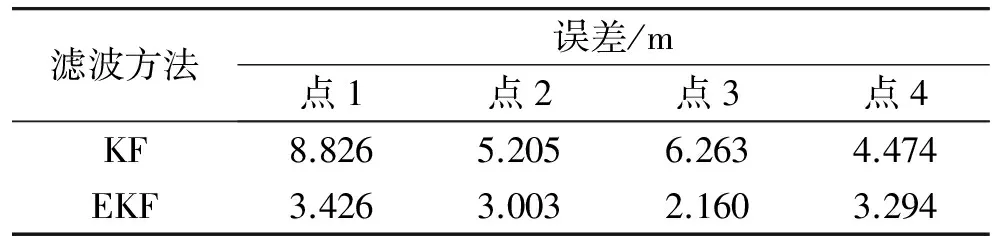
表2 经度误差Table 2 Latitude error
5 结束语
本文针对工程应用中的SINS/GPS组合导航系统进行了研究,建立了一种适合于工程应用的导航计算模型。同时,采用自适应卡尔曼滤波器的改进算法扩展卡尔曼滤波对误差进行了估计,有效克服了纯惯导系统误差发散的现象,提高了系统的导航精度。通过实验结果表明, 此组合导航系统性能稳定,具有良好的重复性和稳定性。所建立的模型能够满足工程实际的使用要求。
[1] 蒋庆仙.关于MEMS惯性传感器的发展及在组合导航中的应用前景[J]. 测绘通报,2006(9):5-8. JIANG Qing-xian. The Development of the MEMS Inertial Sensor and Its Application Perspective in Integrated Navigation [J]. Bulletin of Surveying and Mapping, 2006(9):5-8.
[2] 蔡春龙,刘翼,刘一薇.MEMS仪表惯性组合导航系统发展现状与趋势[J]. 中国惯性技术学报,2009,17(10):562-567. CAI Chun-long, LIU Yi, LIU Yi-wei. Status Quo and Trend of Inertial Integrated Navigation System Based on MEMS [J]. Journal of Chinese Inertial Technology, 2009,17(10):562-567.
[3] 唐康华,吴美平,胡小平.基于自适应滤波器的MIMU/ GPS组合系统的研究[J].压电与声光,2007,29(4):398-401. TANG Kang-hua, WU Mei-ping, HU Xiao-ping. Study on MIMU/GPS Integrated Navigation System Based on Adaptive Kalman Filter[J]. Piezoelectrics and Acoustooptics,2007,29(4):398-401.
[4] 于洁,王新龙.SINS/GPS紧密组合导航系统仿真研究[J].航空兵器,2008(6):8-13. YU Jie, WANG Xin-long. Simulation of SINS/GPS Tightly Coupled Integrated Navigation System[J].Aero Weaponry,2008(6):8-13.
[5] QI Hong-hui,MOORE J B. Direct Kalman Filtering Approach for GPS/INS Integration Aerospace and Electronic Systems[J]. IEEE Transactions on Aerospace and Electronic Systems,2002,38(2):687-693.
[6] 曾洪贵,罗大成,王明福.一种SINS/CNS紧耦合组合导航信息融合方法[J].现代防御技术,2009,37(4):35-37. ZENG Hong-gui,LUO Da-cheng,WANG Ming-fu .Performance Analysis of a New Tightly Coupled SINS/CNS Integration. [J].Modern Defence Technology ,2009,37(4):35-37.
[7] 吴平,雷虎民,刘代军,等. 基于UKF算法的SINS/GPS全组合导航系统研究 [J].现代防御技术,2010,38(4):47-52. WU Ping, LEI Hu-ming, LIU Dai-jun,et al. Fully Integrated SINS/GPS Navigation System Based on Unscented Kalman Filter Algorithm[J].Modern Defence Technology ,2010,38(4):47-52.
[8] 秦永元,张洪铖,汪叔华.卡尔曼滤波与组合导航原理[M].西安:西北工业大学出版社,1998. QIN Yong-yuan,ZHANG Hong-cheng,WANG Shu-hua.Kalman Filtering and Integrated Navigation Principle[M].Xi’an:Northwestern Polytechnical University Press,1998.
[9] 马云峰.MSINS/GPS组合导航系统及其数据融合技术研究[D].南京:东南大学,2006. MA Yun-feng.Research on MSINS/GPS Integrated Navigation System and Its Fusion Technology[D].Nanjing:Southeast University,2006.
[10] 高社生,周涛,赵忠.卡尔曼滤波直接法在INS/GPS组合导航系统中的应用[J].弹箭与制导学报.2002,22(1):28-30. GAO She-sheng,ZHOU Tao, ZHAO Zhong.The Application of Kalman Direct Filtering in INS/GPS Integrated Navigation System[J].Journal of Projectiles Rockets Missiles an Guidance,2002,22(1):28-30.
[11] 黄丽斌,周百令.低成本MINS/GPS组合导航中Kalman滤波算法的综合应用研究[J].中国惯性技术学报,2005,13(5):16-19. HUANG Li-bin,ZHOU Bai-ling. Synthetical Application on Kalman Filtering Algorithms of Low Cost MINS/GPS Navigation System[J]. Journal of Chinese Inertial Technology,2005,13(5):16-19.
[12] 范炜,李勇. 近似二阶扩展卡尔曼滤波方法研究[J].空间控制技术与应用,2009,35(1):30-35. FAN Wei, LI Yong. A Method of Approximate Second-Order Extended Kalman Filter[J]. Aerospace Control and Application , 2009,35(1):30-35.
[13] 邹卫军,薄煜明. 差分线性化EKF 滤波方法研究[J].计算机工程与应用,2009,45(9):64-66. ZOU Wei-jun,BO Yu-ming. A Research of EKF Based on Differential Linearization [J]. Computer Engineering and Applications , 2009,45(9):64-66.
Low-Cost SINS/GPS Integrated Navigation System
ZHANG Wena,SUN Rui-shengb
(Nanjing University of Science and Technology, a.Taizhou Institude,Jiangsu Taizhou 225300,China; b.School of Power Engineering,Jiangsu Nanjing 210094, China)
Taking the navigation system of the low cost guided missile project as the research object, the low cost integrated navigation system is investigated. The inertial navigation system features small size, low power and so on. But its long-term stability is poor because of position error accumulating with the growing time. Now the most widely used satellite navigation is the global navigation satellite system. Long-term accuracy of GPS (global positioning system) is good but is subject to the American government. Its dynamic positioning performance is poor and the rate of updating is low. SINS (strapdown inertial navigation system)/GPS integrated navigation system is made by using the advantages of two systems, which is suitable for engineering application. The integrated navigation is implemented by adopting Kalman filtering algorithm. In the end, the result of the vehicle experiment indicates that the scheme can improve the precision of the navigation system and has high engineering practice.
strapdown inertial navigation system(SINS); global positioning system(GPS);integrated navigation system;Kalman filter
2013-11-30;
2014-07-05
国家自然科学基金项目(11176012)
张文(1982-),女, 江苏泰州人。讲师,硕士,主要从事组合导航,嵌入式系统等方面的研究。
通信地址:225300 江苏省泰州市梅兰东路8#南京理工大学泰州科技学院 E-mail:18814219@qq.com
10.3969/j.issn.1009-086x.2015.03.011
V249.32+8;P228.4
A
1009-086X(2015)-03-0060-05
猜你喜欢
北京航空航天大学学报(2022年8期)2022-08-31
舰船科学技术(2022年10期)2022-06-17
北京航空航天大学学报(2021年7期)2021-08-13
数字海洋与水下攻防(2020年5期)2021-01-04
中学生数理化·八年级物理人教版(2020年11期)2020-12-14
电子制作(2019年23期)2019-02-23
北京航空航天大学学报(2018年1期)2018-04-20
北京航空航天大学学报(2017年9期)2017-12-18
百科探秘·航空航天(2016年9期)2016-12-01
太空探索(2015年5期)2015-07-12