防空导弹随动定向战斗部自校正控制研究*
2015-05-05 06:35滕玺米双山张王卫
现代防御技术 2015年3期
滕玺,米双山,张王卫
(军械工程学院,河北 石家庄 050003)

防空导弹随动定向战斗部自校正控制研究*
滕玺,米双山,张王卫
(军械工程学院,河北 石家庄 050003)
建立了防空导弹随动定向战斗部模型,提出了运用最小方差控制、广义最小方差控制分别同带遗忘因子的递推最小二乘法配合的自校正控制以及广义预测控制,对比了这几种方法的特点、效果与不足,并展望了未来防空导弹随动定向战斗部控制策略的发展方向。仿真结果表明,自校正控制在防空导弹随动定向战斗部系统中能起到良好的效果,特别在面对非最小相位系统时,广义预测控制体现了它特有的优势。
随动定向战斗部;自校正控制;最小方差控制;广义预测控制
0 引言
防空导弹武器系统是国家防空力量的重要组成部分,在国土防空和信息化战争中负有重要使命[1]。但是其所需要对付的空中目标的机动性和防御能力越来越强,战斗机、直升机、无人机以及空袭导弹(air ballistic missile,ABM)这类目标的特点是能够低空飞行,有一定的机动性和防护性;战术弹道导弹(tactical ballistic missile,TMB),这类目标的特点是速度快,机动性差[2]。
防空导弹随动定向战斗部[3]就是利用伺服系统,控制战斗部对准目标实施定向爆破,提高破片和装药利用率的战斗部。这样可以降低对导弹本身的过载要求,提高毁伤能力。
由于飞行速度和高度的变化以及大过载的产生,使得防空导弹在整个飞行的过程中,弹体各项参数剧烈变化,随动定向战斗部控制效果受到严重影响[4]。对于现行的随动定向战斗部,一般采用闭环回路来减弱参数变化时对系统的影响,但这种方法并不能完全消除这种影响[5]。为进一步提高控制性能,有必要采用自适应控制。自校正控制[6-7]是自适应控制的一种,它适用于结构已知,但参数未知而恒定或参数缓慢变化的系统。采用自校正控制需要辨识被控系统的参数,并自动校正控制作用,达到预期的控制效果。用自校正控制技术设计防空导弹随动定向战斗部,能够使被控系统适应参数变化,保持较好的性能。
1 防空导弹随动定向战斗部模型的建立
防空导弹随动定向战斗部控制回路的模型如图1所示。
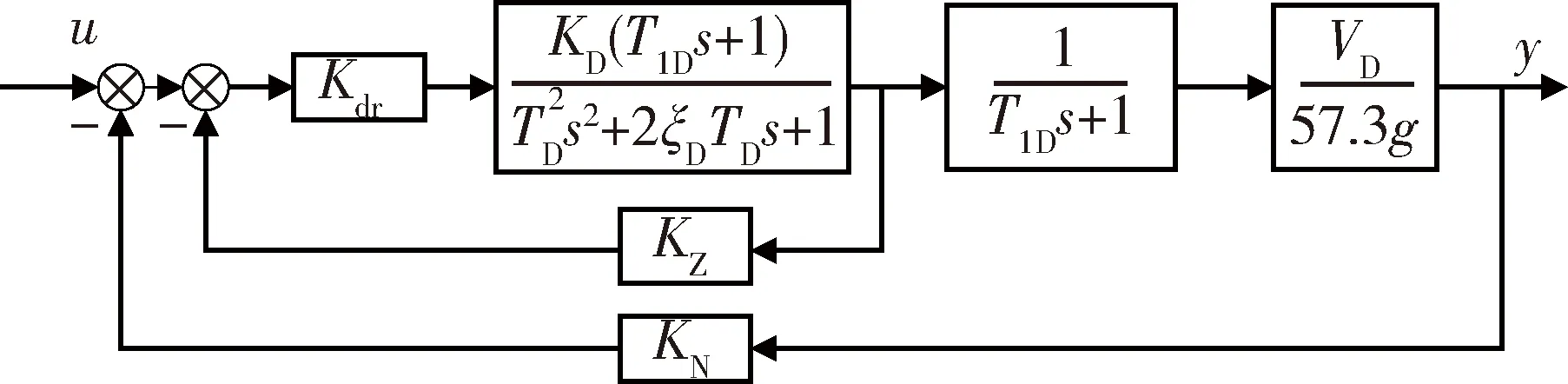
图1 防空导弹随动定向战斗部控制回路Fig.1 Control circuit of servo aimable warhead of anti-aircraft missile
图中,u为控制输入,经过舵机、弹体(含阻尼回路),生成角加速度信号,并经信号变换输出y为过载,Kdr为控制信号增幅,KZ为位置反馈,KN为加速度反馈。其阻尼回路的传递函数为
(1)
式中:
加速度回路传递函数为
(2)
式中:
考虑控制系统受到噪声干扰,被控对象的差分方程为
A(q-1)y(t)=q-dB(q-1)u(t)+C(q-1)ζ(t),
(3)
式中:
A(q-1)=1+a1q-1+…+anqna,
B(q-1)=b0+b1q-1+…+bmq-m,
C(q-1)=c0+c1q-1+…+clq-l.
2 防空导弹随动定向战斗部自校正控制方案的确定
自校正控制是目前应用最广的一类自适应控制方法。它的基本思想是将参数估计递推算法与各种不同类型的控制算法结合起来,形成一个能自动校正控制器参数的实时控制系统[8]。自校正控制既能完成调节任务,也能进行伺服跟踪,完成控制任务,它主要应用于结构已知但参数未知而恒定的随机系统,也适用于结构已知但参数缓慢变化的随机系统[9]。
根据某导弹弹道参数[10],可知,防空导弹随动定向战斗部的结构已知且参数为慢时变的,所以可以用自校正的方法予以控制。
防空导弹随动定向战斗部结构为
a0y(k)+a1y(k-1)+a2y(k-2)=
q-d[b0u(k)+b1u(k-1)]+c0ξ(k)+c1ξ(k-1).
(4)
2.1 最小方差控制
最小方差自校正控制器[11]要求系统的输出y(t)在噪声干扰和参数变化的情况下,能很好地跟踪参考输入yr(t)。B(z-1)为Hurwitz多项式,即对象是最小相位或逆稳定,则有:
设控制目标是使实际输出y(k+d)跟踪期望输出yr(k+d),使性能指标
J=E{[y(k+d)-yr(k+d)]2}
(5)
为最小,则最小方差控制律为
F(z-1)u(k)=C(z-1)yr(k+d)-G(z-1)y(k).
(6)
2.2 广义最小方差控制
在求解控制律的性能指标中引入对控制量的加权项,从而限制控制作用过于剧烈变化;另外,只要适当选择性能指标中的各加权多项式,广义最小方差控制可以适用于非最小相位系统。
设被控对象如式(4),选择性能指标函数:
J=E{[P(z-1)y(k+d)-R(z-1)·yr(k+d)]2+[Q(z-1)u(k)2]},
(7)
式中:y(k+d),yr(k+d)分别为第(k+d)时刻的系统实际输出及期望输出;u(k)为第k时刻的控制量;P(z-1),R(z-1)和Q(z-1)分别为实际输出、期望输出和控制量的加权多项式,它们分别具有改善闭环系统性能、柔化期望输出和约束控制量的作用:
P(z-1)=1+p1z-1+p2z-2+···+pnpz-np,
R(z-1)=r0+r1z-1+r2z-2+···+rnrz-nr,
Q(z-1)=q0+q1z-1+q2z-2+···+qnqz-nq.
控制系统的设计目的是选择控制律,使得式(7)中的性能指标J最小。
对于对象(3),使性能指标(7)最小的广义最小方差控制律为
(8)
或
u(k)=[C(z-1)R(z-1)yr(k+d)-
F(z-1)P(z-1)].
(9)
2.3 广义预测控制
预测控制不是某一种统一理论的产物,而是源于工业实践,在积极吸收其他学科的思想、方法和成果的基础上,并在工业实践过程中发展和完善起来的一类计算机控制算法[12]。各类预测控制算法的共性可概括为3点:预测模型、滚动优化和反馈校正。这三要素也是预测控制区别于其他控制方法的基本特征,同时也是预测控制在实际工程应用中取得成功的技术关键。
2.4 随动定向战斗部自校正控制方案中的参数辨识
为了实现自校正控制,必须选用一种合适的在线辨识方法来估计对象的参数。可用的在线辨识方法很多,每种方法都各有其特点,当与自校正控制相结合时,就存在适用性问题,就是指辨识精度、收敛速度、运算量、内存占有量及结合自校正控制后的效果等能否满足工程技术要求。
考虑辨识方法结合对象模型和最小方差自校正进行计算,递推最小二乘法对时变参数具有较强的跟踪能力,并具有一定的抗干扰性。这里采用带遗忘因子的递推最小二乘法。
取性能指标为
(10)
针对式(10)的目标函数,与递推最小二乘法的推导过程相同,可得遗忘因子递推最小二乘参数估计的公式:

3 随动定向战斗部自校正控制方案的仿真
为了便于仿真研究,假设研究对象(防空导弹随动定向战斗部)的数学模型为
y(k)-1.7y(k-1)+0.7(y-2)=
u(k-4)+0.5u(k-5)+ξ(k)+0.2ξ(k-1),
(12)
式中:ξ(k)为方差为0.1的白噪声。

3.1 最小方差自校正控制仿真
采用最小方差自校正控制间接算法:
a=[1 -1.7 0.7]; b=[1 0.5]; c=[1 0.2]; d=4; %对象参数
……
u(k)=(-f(2:nf+1)*uk(1:nf)+ce*[yr(k+d:-1:k+d-min(d,nc));yrk(1:nc-d)]-g*[y(k);yk(1:na-1)])/f(1); %求控制量
……
运行结果如图2所示。

图2 最小方差控制最小相位系统效果图Fig.2 MVC rendering minimum phase system
当防空导弹随动定向战斗部为最小相位系统时,最小方差自校正控制较为稳定,得到良好的控制效果,被控对象参数估计结果准确。
3.2 广义最小方差自校正控制仿真
在飞行过程中,防空导弹随动定向战斗部不一定为最小相位系统,当被控对象为
y(k)-1.7y(k-1)+0.7(y-2)=u(k-4)+
2u(k-5)+ξ(k)+0.2ξ(k-1),
(13)
即为被控对象不是最小相位系统,控制系统的开环传递函数的所有极点和零点没有都位于s左半平面。
若采用一般的最小方差自校正控制,则会得到如3图结果,完全达不到控制的效果,体现出了最小方差自校正不能适用于非最小相位系统的缺点。
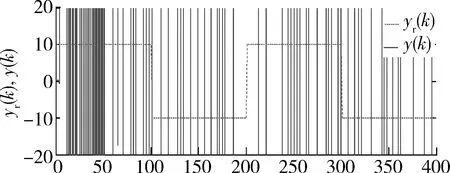
图3 最小方差控制非最小相位系统效果图Fig.3 MVC rendering non-minimum phase system
最小方差控制只能用于最小相位系统,即逆稳定系统,且对靠近单位圆的稳定零点非常灵敏,当干扰方差较大时,由于需要一步完成校正,所以控制量的方差也很大,这将加速执行机构的磨损。
对上述非最小相位系统,取加权项P(z-1)=1,R(z-1)=1和Q(z-1)=2,采用广义最小方差自校正控制如下:
a=[1 -1.7 0.7]; b=[1 2]; c=[1 0.2]; d=4; %对象参数
……
Pw=1; R=1; Q=2; %加权多项式P,R,Q
np=length(Pw)-1; nr=length(R)-1; nq=length(Q)-1;
……
得到结果如图4所示。
采用广义最小方差自校正控制,可以通过调整加权项,适用于非最小相位系统,但是控制效果一般,并且加权项的选择十分不易。
3.3 广义预测控制仿真
得到结果如图5所示。
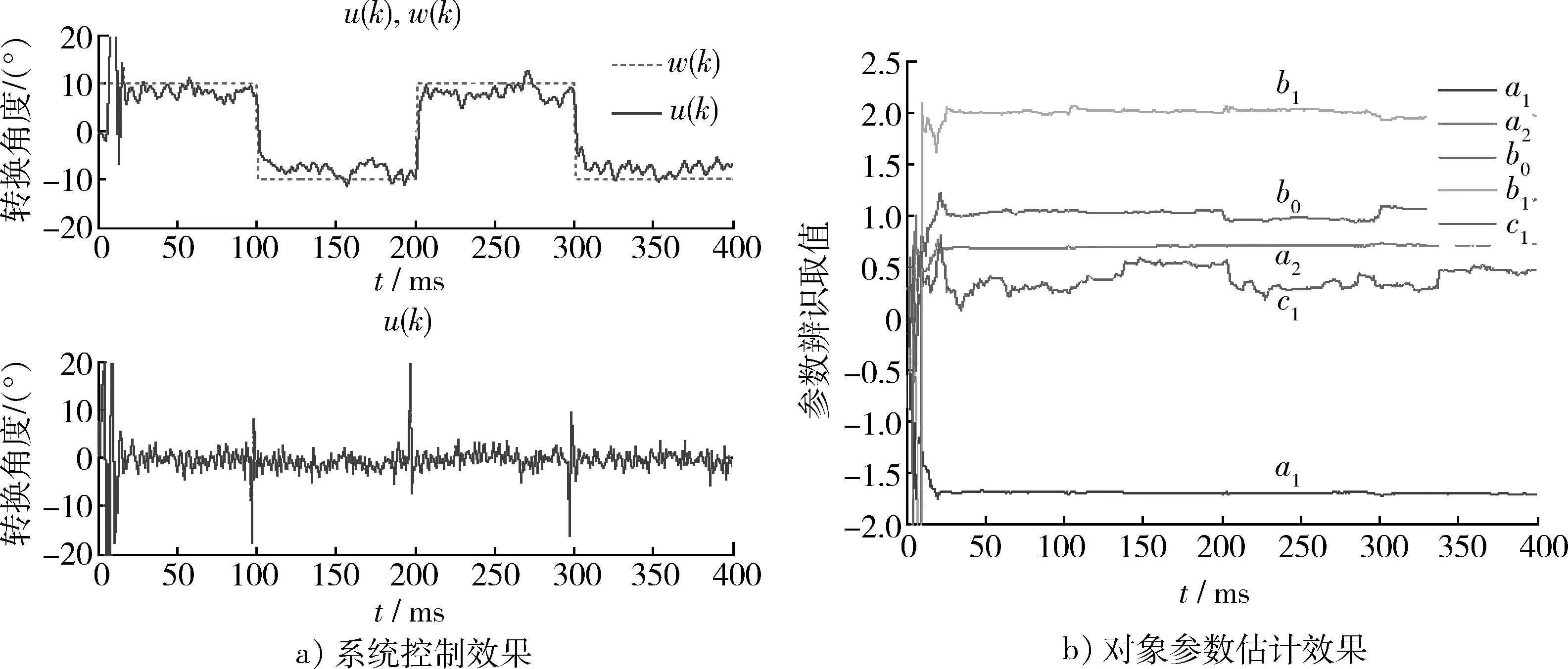
图4 广义最小方差控制非最小相位系统效果图Fig.4 GMVC control rendering minimum phase system

图5 广义预测控制效果图Fig.5 Generalized predictive control effect
与最小方差控制相比,广义最小方差控制在性能上有很大改善,能够实现对非最小相位系统的控制,并对控制作用有一定的约束,但在实际工程应用中,如何选择适当的加权多项式,有比较大的困难。广义预测控制是一种鲁棒性强、能够有效地克服系统滞后、可应用于开环不稳定非最小相位系统的先进控制算法,解决了广义最小方差自校正控制关于加权项的选择不易的问题。但是由于它需要Diophantine方程计算、矩阵求逆和最小二乘的递推求解,因此计算量比较大。
4 结束语
最小方差控制是自校正控制的基础,比较稳定地控制防空导弹随动定向战斗部,但是当系统为非最小相位系统时,失去了控制能力;广义最小方差控制解决的最小方差控制的关于不能控制非最小相位系统等问题,但是又带来了加权项不易选择的问题;广义预测控制进一步改进了广义最小方差控制,解决了加权项选择问题,但是计算量偏大。
防空导弹随动定向战斗部的控制要在稳定的基础上提高精度,才能保证战斗部的毁伤效果,加上在防空导弹飞行过程中的各种影响要素很多,抗干扰性也是不能忽视的一点。对于导航来说,在飞行前端,精度的要求不是很高,但是到了飞行后段,精度的要求就越来越明显了。因此,结合智能方法的自校正控制方法在防空导弹随动定向战斗部控制方面有很好的应用前景。
[1] 彭立影,贾希胜,韩永新. 用于评估地空导弹系统效能的模糊综合模型[J]. 现代防御技术,2012,40(2):13-16. PENG Li-ying, JIA Xi-sheng, HAN Yong-xin. Ambiguity Comprehensive Valuation Model of System Effect on the Surface to Air Missile [J]. Modern Defence Technology, 2012, 40(2): 13-16.
[2] 钟凌伟. 伴随法在防空导弹脱靶量研究中的应用[J]. 现代防御技术,2012,40(6):46-50. ZHONG Ling-wei. Application of Adjoint Method in the Study of Miss Distance of Air Defense Missile [J]. Modern Defence Technology, 2012, 40(6): 46-50.
[3] TALLY JAMES C, Dahlgren Va. Aimable Warhead: USP, 5182418[P]. 1993.
[4] RICHARD M L. Physics of Direct Hit and Near Miss Warhead Technology [M]. Alexander Bell Driver, Reston, Virginia: American Institute of Aeronautics and Astronautics, Inc, 2001: 4-8.
[5] 郝福建,于云峰,仝浩,等. 战术导弹自动驾驶仪变结构控制设计与仿真[J]. 计算机仿真,2009,26(7):90-94. HAO Fu-jian, YU Yun-feng, TONG Hao, et al. Design and Simulation of Tactical Missile’s Autopilot Based on Variable Structure Control [J]. Computer Simulation, 2009, 26(7): 90-94.
[6] 徐湘元. 自适应控制理论与应用[M]. 北京:电子工业出版社,2007. XU Xiang-yuan. Adaptive Control and application [M]. Beijing: Electronic Industry Press, 2007.
[7] 师黎,陈铁军,李晓媛,等. 智能控制理论及应用[M]. 北京:清华大学出版社,2009. SHI Li, CHEN Tie-jun, LI Xiao-yuan, et al. Intelligent Control Theory and Applications [M]. Beijing: Tsinghua University Press, 2009.
[8] 庞中华,崔红. 系统辨识与自适应控制MATLAB仿真[M]. 北京:北京航空航天大学出版社,2009. PANG Zhong-hua, CUI Hong. System Identification and Adaptive Control MATLAB Simulation [M]. Beijing: Beijing University of Aeronautics and Astronautics Press, 2009.
[9] ASTROM K J, BORISSON U, LJUNG L, et al. Theory and Applications of Self-Tuning Regulators[J]. Automatica,1997,13(5):456-476.
[10] 陈尧,张靖,王帅. 小型战术导弹捷联惯导算法及仿真平台研究[J]. 弹箭与制导学报,2010,30(1):33-36. CHEN Yao, ZHANG Jing, WANG Shuai. Research on Strapdown Algorithm and Simulation Workbench Based on Small Tactical Missile [J]. Journal of Projectiles, Rockets, Missiles and Guidance, 2010, 30(1): 33-36.
[11] BERSINI H,VARELA F. Hints for Adaptive Problem Solving Gleaned From Immune Network[C]∥ Parall Problem Solving from Immune Nature,Berlin Heidelberg:Springer-Verlag,1991:343-354.
[12] 时维国,邵诚,孙正阳. 基于AR模型时间延预测的改进GPC网络控制算法[J]. 控制与决策,2012,27(3):477-480. SHI Wei-guo, SHAO Cheng, SUN Zheng-yang. Improved GPC Network-Control Algorithm Based on AR Model Time-Delay Prediction [J]. Control and Decision, 2012, 27(3): 477-480.
Self-Tuning Control of Servo Aimable Warhead of Antiaircraft Missile
TENG Xi, MI Shuang-shan, ZHANG Wang-wei
(Ordinance Engineering College, Hebei Shijiazhuang 050003, China)
The model of the servo aimable warhead of antiaircraft missile is established. Then, the methods that the minimum variance control (MVC) and generalized minimum variance control (GMVC) with forgetting factor and generalized predictive control (GPC) are proposed. The characteristics, effect and disadvantage of these methods are compared, and the development direction of servo aimable warhead of antiaircraft missile is prospected. The simulation results show that self-tuning control can play good effect and GPC embodies especially the unique advantages in non-minimum-phase system.
servo aimable warhead; self-tuning control; minimum variance control(MVC); generalized predictive control(GPC)
2013-12-25;
2014-07-05
滕玺(1989-),男,四川内江人。硕士生,主要从事系统建模与仿真方面的研究。
通信地址:233000 安徽省蚌埠市装甲兵学院教练团汽车一连 E-mail:jxxytxttx@126.com
10.3969/j.issn.1009-086x.2015.03.009
TJ760.3;TP273
A
1009-086X(2015)-03-0049-06
猜你喜欢
辽宁师范大学学报(自然科学版)(2021年4期)2022-01-10
兵器装备工程学报(2021年9期)2021-10-15
南宁师范大学学报(自然科学版)(2021年2期)2021-07-29
中学生数理化(高中版.高考数学)(2021年3期)2021-06-09
中国中医急症(2019年10期)2019-05-21
兵器装备工程学报(2018年9期)2018-10-11
数学学习与研究(2018年12期)2018-08-17
初中生世界·九年级(2017年10期)2017-11-08
中学生数理化·八年级数学人教版(2016年5期)2016-08-23
中学生数理化·八年级数学人教版(2016年5期)2016-08-23