
一种海洋地震拖缆控制器系统设计
2015-05-05 08:49蔡晔敏卢卓浩张维竞
实验技术与管理 2015年12期
蔡晔敏, 唐 佳, 卢卓浩, 张维竞
(1. 上海工程技术大学 工程实训中心, 上海 201620;2. 上海交通大学 船舶海洋与建筑工程学院, 上海 200040)
一种海洋地震拖缆控制器系统设计
蔡晔敏1, 唐 佳1, 卢卓浩1, 张维竞2
(1. 上海工程技术大学 工程实训中心, 上海 201620;2. 上海交通大学 船舶海洋与建筑工程学院, 上海 200040)
海洋地震拖缆控制器系统是一种控制拖缆位置的系统。由于拖缆存在负浮力及容易受风、浪、流的干扰,如何精确控制水下深度是一个难题。针对系统具有非线性、时变不确定、强干扰、很难建立数学模型等特点,提出了模糊-PID控制的方法,建立了数学模型,设计了模糊-PID控制器,并用Matlab软件对其建模、仿真和优化。仿真结果表明,与传统PID控制相比,模糊-PID控制具有更高的稳态精度和更快的动态响应速度,能有效减小在勘探过程中由于拖缆位置的偏移而产生的误差,具有工程应用价值。
海洋地震拖缆; 控制器系统; 模糊控制; 传统PID控制; 仿真
全球范围内海洋石油勘探活动的日益频繁,丰富的海洋油气资源促使了海洋油气勘探技术的不断提高,我国亟需开发具有自主知识产权的海洋地震拖缆控制器系统,提升我国在海洋石油勘探技术方面的实力和竞争力[1-4]。海洋地震拖缆控制器系统是一种能有效控制勘探过程中拖缆控制器深度与间距,实现拖缆定位的系统。由于拖缆存在负浮力及容易受风、浪、流的干扰,导致其偏离预期的位置,因此如何精确控制水下深度是一个难题。针对这种非线性、时变不确定、强干扰、很难建立数学模型的系统,传统PID控制方法难以获得理想的控制效果,实际值偏离期望值较大并且动态特性较差,响应速度慢[5-7]。
针对以上问题,本文提出了模糊-PID控制方法,对于那些不能建立精确数学模型的系统,利用模糊控制的专家规则式的控制方式,实现了海洋地震拖缆控制器系统的设计。该控制方法对参数的变化不敏感,具有鲁棒性强和动态性能好等特点[8-11],提高了控制精度和勘探效率。结果表明,模糊-PID控制技术在海洋地震拖缆控制器系统中具有实际应用价值。
1 海洋地震拖缆控制器系统原理
海洋地震拖缆控制器(又称水鸟,见图1)是一种缆载定深控制器,以一定的距离安装在拖缆上,利用其攻角可调的升力面来控制拖缆位置,可在水下对拖缆进行控制,使其保持在指定位置[8,12]。该系统的控制原理框图见图2。
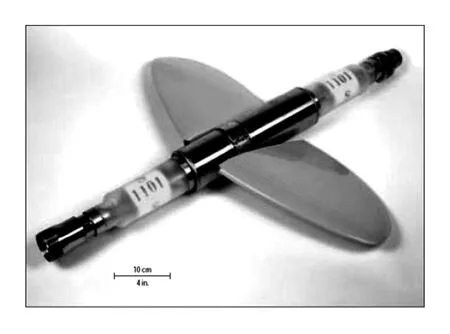
图1 海洋地震拖缆控制器(水鸟)
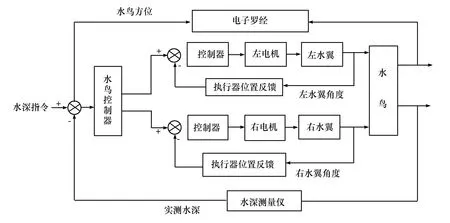
图2 海洋地震拖缆控制器系统原理框图
海洋地震拖缆控制器(以下简称拖缆控制器)系统工作原理:拖缆控制器的深度可自行设置,并通过上位机下达指令,利用以太网传送到每个拖缆控制器;然后拖缆控制器传出信号,使执行机构(左右微电机)将水翼转动到要求的角度以提供相应的升力,通过控制每个拖缆控制器的位置来达到精确控制拖缆位置的目的。安装在拖缆控制器内部的深度传感器测量得到的实际深度作为控制反馈。简化后的系统原理见图3。
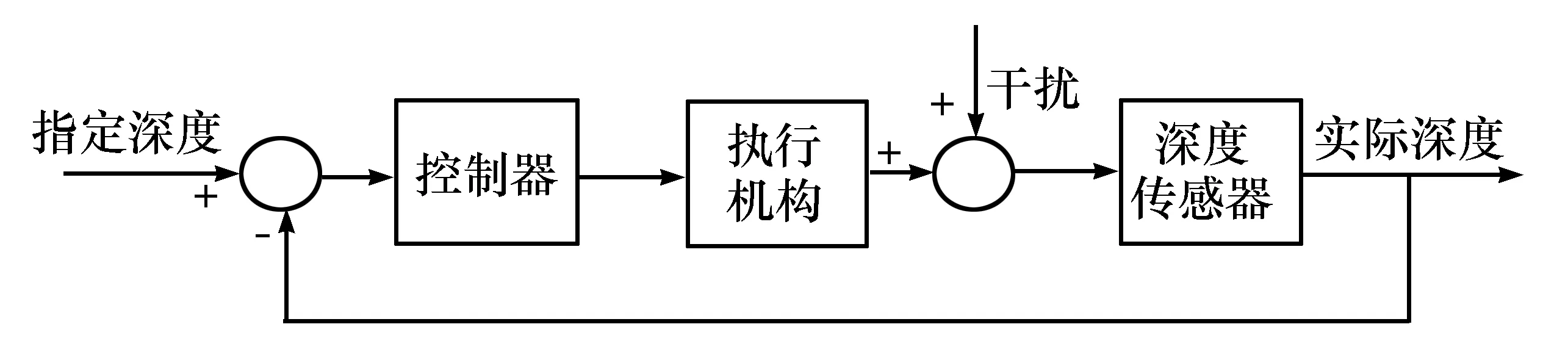
图3 简化后的系统原理
2 海洋地震拖缆控制器系统的数学模型
假设海洋地震拖缆控制器系统在水下作一维匀速运动(忽略在水平方向上的海洋风、浪、流等作用),由于拖缆长度较长,而拖缆的变形属于小变形,所以拖缆可仍然视为直线状态。假设此时仅第N个拖缆控制器受到一个深度方向上的阶跃扰动,而其他控制器都没有受到影响,仍处于平衡位置。对第N个拖缆控制器进行受力分析见图4。
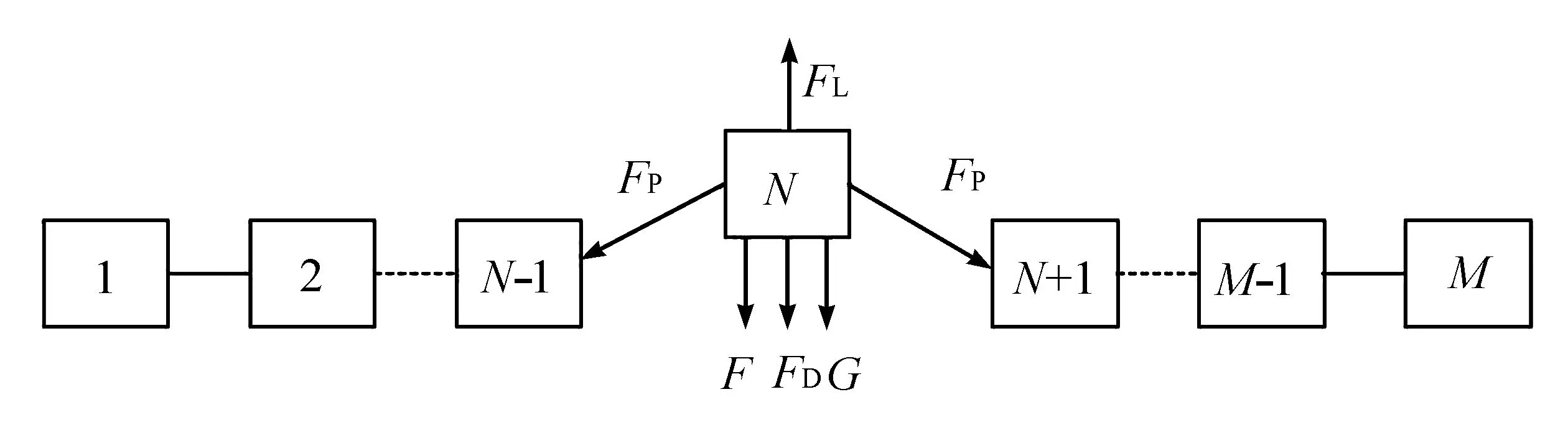
图4 海洋地震拖缆控制器系统受力分析图

(1)
式中:m为拖缆控制器的质量;a为拖缆控制器的运动加速度;Y为拖缆控制器偏离平衡位置的位移量。
通过变换可得到传递函数:
(2)
式中C为水的阻力系数,L为相邻两拖缆器之间的间距。
在实际勘探中,一般控制拖缆深度在水下6~10 m,以降低海面波浪噪声对数据采集的影响。因此,设定初始条件:海洋地震拖缆器质量m为2.32 kg,水阻力系数C为2,相邻两个海洋地震拖缆器间距L为100 m,拉力FP为6 000 N,设定水下深度d为8 m。将数据代入公式(2),则其传递函数为
(3)
3 模糊-PID控制器设计
3.1 模糊-PID控制器结构确定
由于拖缆控制器系统具有不确定性、非线性和难于建立精确数学模型等特性,所以选用模糊-PID控制器,即输入变量为拖缆控制器水下实际深度与目标深度的偏差E和偏差变化率EC,输出变量U为水翼的攻角大小。其结构如图5所示。
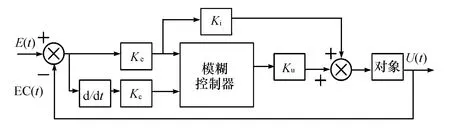
图5 模糊-PID控制器
3.2 模糊-PID控制器基本论域、论域、模糊集的确定
设输入E的基本论域为[-E,E],输入变化率EC的基本论域为[-EC,EC],输出变量U的基本论域为[-U,U],其中E、EC和U值由实际水翼攻角与
理想水翼的攻角之间的误差值的大小确定。
根据实际和经验,本课题研究的控制系统的变量误差E、误差变化率EC以及控制量U的模糊集、基本论域及其论域定义如下:
(1)E的模糊变量语言值为{NB,NM,NS,ZE,PS,PM,PB},其量化集论域为{-6,-5,-4,-3,-2,-1,0,1,2,3,4,5,6},其基本论域为[-3,3];
(2) EC的模糊变量语言值为{NB, NS,ZE,PS,PB},其量化集论域为{-3,-2,-1,0,1,2,3},其基本论域为[-0.25,0.25];
(3) 输出变量U的模糊变量语言值为{NB,NM,NS,ZE,PS,PM,PB},其量化集论域为{-6,-5,-4,-3,-2,-1,0,1,2,3,4,5,6},一般状态下水翼攻角的变换范围为[-30°,+30°]。
3.3 模糊-PID控制规则设计的基本思想
根据模糊-PID控制理论,当误差为负大、误差的变化为负大时,发现误差有变大的趋势,就要求控制器的输出量U为正大,以便尽快跟上设定值的变化;当误差为正大、误差的变化为正大时,为防止出现超调,选取控制量变化为负小。根据拖缆控制器的实际情况,制订的相应的模糊-PID控制规则见表1。

表1 模糊-PID控制规则表
3.4 模糊-PID控制表的确定
已知输入变量偏差和偏差变化率的值,由控制表查出模糊-PID控制器输出控制变量U的值见表2。
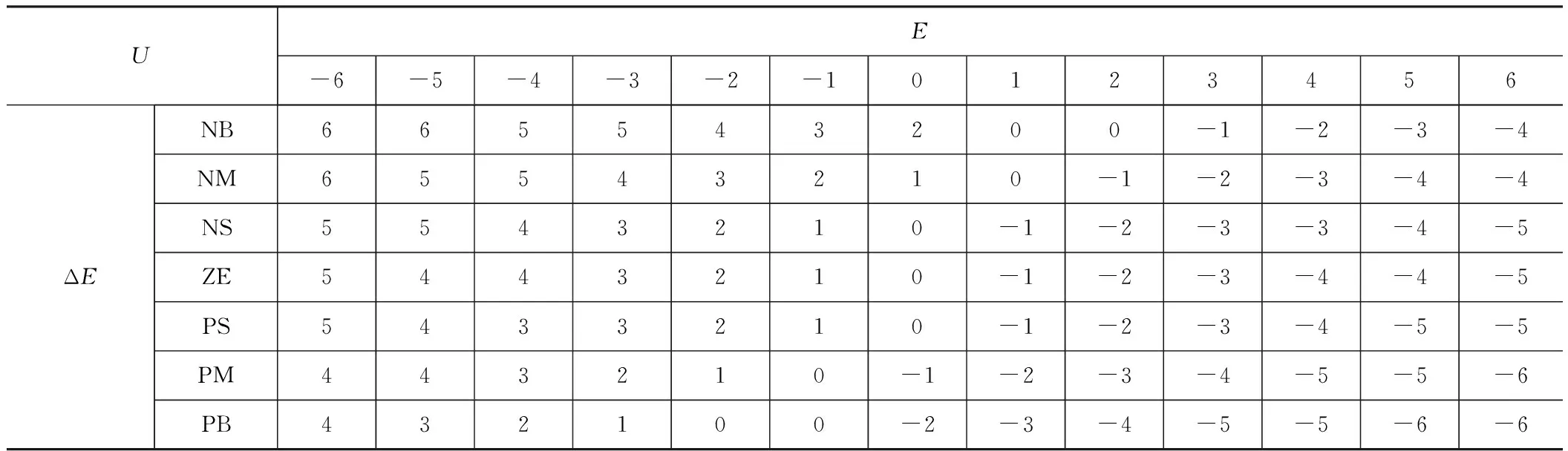
表2 模糊-PID控制查询表
4 海洋地震拖缆器系统仿真及结果分析
为了比较传统PID控制器和模糊-PID控制器在拖缆器系统控制中的性能差别,并为模糊-PID控制器的设计在实际应用中提供理论依据,分别采用两种控制方法对该系统进行仿真。
通过(3)式所示的传递函数,由传统PID控制器得到的仿真曲线见图6,基于模糊-PID控制的拖缆器仿真模型图见图7,其仿真曲线见图8。

图6 传统PID控制仿真曲线
为了优化系统,调整参数Ke、Kc、Ku、Ki后进行仿真,其响应曲线如图9所示,参数的调整对系统的影响很小,鲁棒性好,能获得较理想的控制特性。
仿真结果表明,采用传统PID控制方法,只能稳定在9 m处,实际深度出现了稳态误差,系统的超调量大,并且响应时间较长,约72 s达到稳态;而采用模糊-PID控制方法,实际深度最后能稳定在7.995 8 m处,与设定深度8 m误差极小,超调极小,其曲线响应速度较快,调节时间短,约10 s即可达到稳态。由上可知,相比传统PID控制,模糊-PID控制具有很好的鲁棒性,对参数的变化不敏感等特性,并且响应速度快,超调小,避免了传统PID控制中由于多种参数影响系统而导致位置难以控制的缺陷,实现了在多变海洋环境中对海洋地震拖缆控制器位置的精确控制。
5 结束语
本文利用模糊-PID控制实现对海洋地震拖缆控制器系统的设计,重点阐述了模糊-PID控制器的设计方法和步骤,利用Matlab软件进行了仿真,并对其进行了系统优化和分析。结果表明,与传统PID控制相比,基于模糊-PID控制的海洋地震拖缆控制器系统克服了传统PID控制参数难以适应系统变化的缺点,实现了在多变环境下的位置控制,具有很好的鲁棒性,响应速度快,超调小,控制精度高。本文为我国设计具有自主知识产权的海洋地震拖缆控制器系统提供了依据。
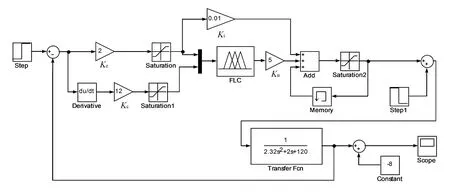
图7 基于模糊-PID控制的海洋地震拖缆器仿真模型图
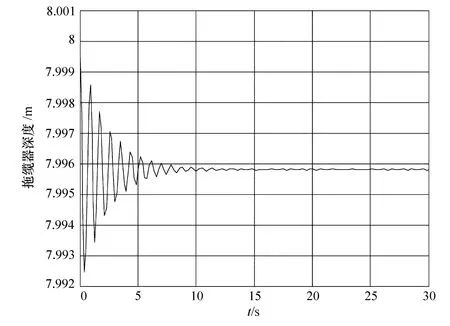
图8 模糊-PID控制的仿真曲线
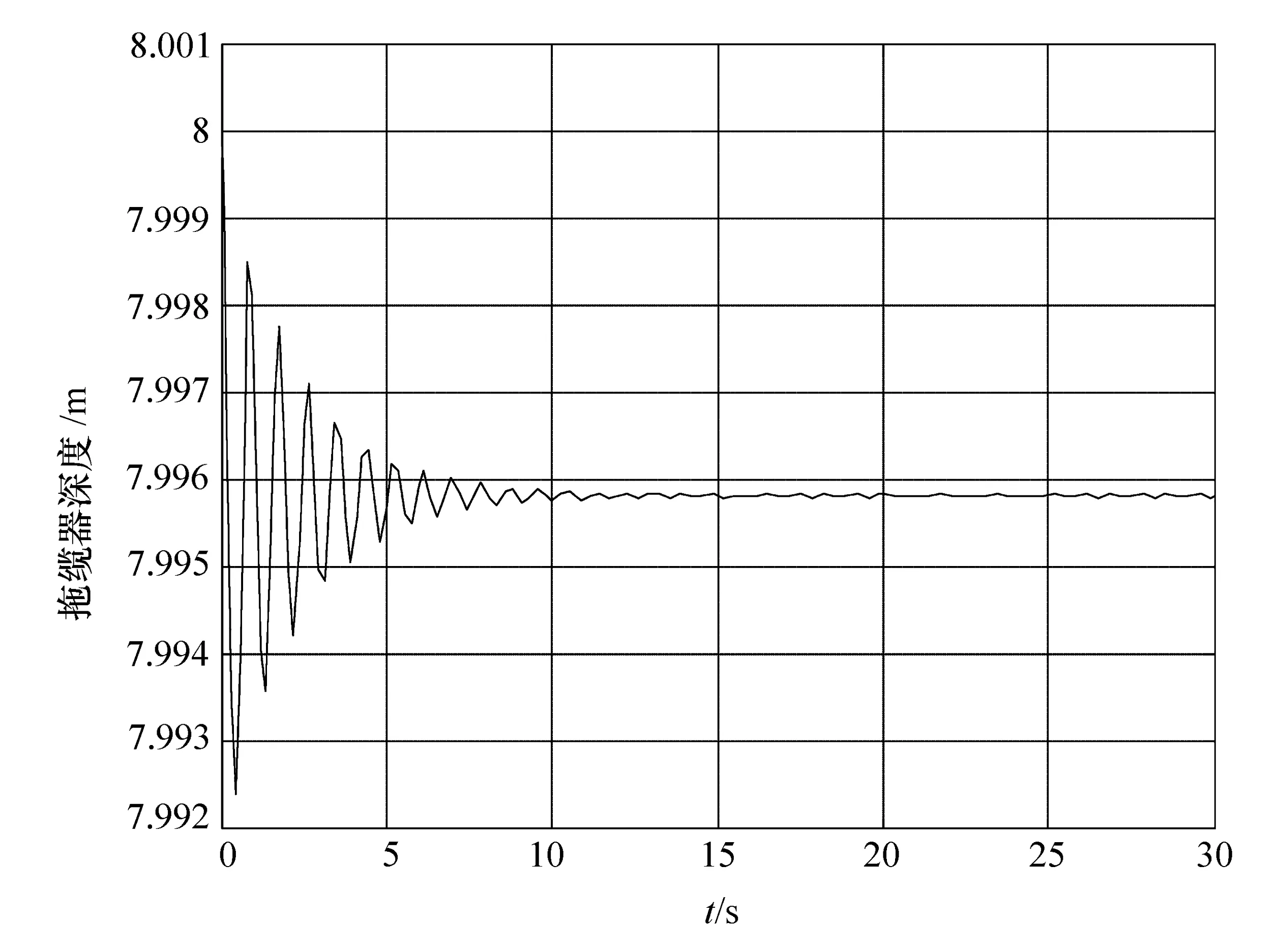
图9 参数整定后的模糊-PID控制仿真曲线
References)
[1] 潘继平.国外深水油气资源勘探开发进展与经验[J].石油科技论坛,2007(4):35-39.
[2] 乔卫杰,黄文辉,江怀友.国外海洋油气勘探方法浅述[J].资源与产业,2009(1):19-23.
[3] 黎刚.浅析深海油气勘探技术的发展现状[J].知识经济,2010(14):99.
[4] 江怀友,李治平,卢颖,等.世界海洋油气酸化压裂技术现状与展望[J].中外能源,2009(11):45-49.
[5] 王立新.模糊系统与模糊控制教程[M].北京:清华大学出版社,2003.
[6] 诸静.模糊控制原理与应用[M].北京:机械工程出版社,1995.
[7] 邹伯敏.自动控制理论[M].北京:机械工业出版社,2001.
[8] 张亮,张维竞,刘涛.海洋资源勘探拖缆水平振动的鲁棒自适应控制[J].振动与冲击,2013(14):134-138.
[9] 彭继慎,宋朋磊.改进PID和模糊控制在异步电机DTC中的应用[J].计算机仿真,2014(6):329-333.
[10] 宋海鹰,谢敏,李羽炯.地源热泵空调系统及其变容量模糊控制[J].计算机仿真,2013(7):358-362,395.
[11] 杨钊,王建华,吴玉平.基于模糊PID的无人水面艇直线路径跟踪[J]. 计算机工程,2014(10):270-274,280.
[12] 张维竞,张小卿,陈峻.基于嵌入式水鸟的海洋地震拖缆运动状态仿真研究[J].海洋工程,2009(4):81-86.
Design of a marine seismic streamer controller system
Cai Yemin1, Tang Jia1, Lu Zhuohao1, Zhang Weijing2
(1. Engineering Training Center, Shanghai University of Engineering Science, Shanghai 201620, China;2. School of Naval Architecture, Ocean and Civil Engineering, Shanghai Jiaotong University, Shanghai 200040, China)
The marine seismic streamer controller system is a system which controls the position of towing cable. The towing cable has its own negative buoyancy and it is easily affected by the interference of wind, wave, flow, etc. So how to control the position of the towing cable precisely is the main problem. Aiming at the marine seismic streamer controller system with nonlinear, time varying uncertainties, strong disturbance and establishing mathematical models difficultly, and the traditional PID control has many disadvantages, the fuzzy -PID control method is proposed, the mathematical model is established, and fuzzy-PID controller is designed. MATLAB is used to modeling, simulate and optimize it. The simulation results show that compared with the traditional PID control, the fuzzy-PID control has higher steady state accuracy and faster dynamic response speed. It can reduce the error effectively due to the drag of the cable location offset in the exploration and it has the engineering value.
marine seismic streamer; controller system; fuzzy control; traditional PID control; simulation
2015- 04- 12 修改日期:2015- 06- 01
上海市第一批实验技术队伍建设计划项目(A2-B-8950-13-0723);上海工程技术大学实践教学改革项目“机床故障诊断及电气安装技术”(A1-0601-14-01268-p201424004)
蔡晔敏(1982—),女,浙江宁波,硕士,实验师,主要研究方向为机电一体化、海洋工程.
TP273; TP391.9
A
1002-4956(2015)12- 0093- 04
猜你喜欢
世界海运(2021年9期)2021-10-08
成都信息工程大学学报(2021年6期)2021-02-12
兵工学报(2019年7期)2019-08-28
测控技术(2018年10期)2018-11-25
船海工程(2018年5期)2018-11-01
琴童(2017年7期)2017-07-31
小学科学(2017年5期)2017-05-26
广东石油化工学院学报(2016年3期)2016-05-17
体育科学研究(2015年5期)2015-02-28
船海工程(2014年4期)2014-06-27
