
拖缆对水下航行器的操纵性能影响
2019-08-28 01:34杜晓旭张小链
兵工学报 2019年7期
杜晓旭, 张小链
(西北工业大学 航海学院, 陕西 西安 710072)
0 引言
海洋拖曳系统作为一种海洋探测平台,广泛应用于海上打捞搜救、海洋资源勘探及军事领域,对国家的发展具有重要意义。海洋拖曳系统通常分为水面船舶拖曳系统和水下拖曳系统。水面船舶拖曳系统由拖曳母船、拖缆和拖曳体等部分组成[1],可以增强母船的探测能力;由水下航行器与拖曳线列阵组成的水下拖曳系统不仅可以增强航行器的水下探测能力,还可模拟大尺度目标的声学亮点特征,作为靶标或诱饵使用。同时水下拖曳系统与水面船舶拖曳系统相比,水下拖曳系统隐蔽性更好,更为安全可靠。但是当拖曳系统工作时,由于水下航行器一般相较于船舶排水量更小,因而其受到拖缆张力作用对其操纵性影响更大,不可忽略。因此研究拖缆对水下航行器操纵性能的影响,对于水下航行器具有重要作用。特别是在系统设计初期,为提高拖曳系统的设计合理性,准确预报和分析水下航行器在各种机动情况下的运动响应是十分重要的[2]。
在海洋拖曳系统的研究中,Ablow等[3]建立了水下拖缆运动的控制方程,并采用有限差分法(FDM)求解拖缆的三维动态运动;Huang[4]利用拖缆应力应变关系建立了一个完善的集中质量法(LMM)数学模型,刘铭等[5]基于集中质量法进行了水下拖曳缆索动力响应分析;Gobat等[6]、孙洪波等[7]和王飞等[8]研究了拖缆结构对船舶运动的影响,而船舶的排水量明显大于航行器的排水量,因此拖缆对航行器运动的影响显然更大;Feng等[9]研究了通讯线缆对航行器纵平面运动性能的影响,而实际中航行器运动不仅局限于纵平面的运动,且拖缆与通讯线缆相比其对航行器的操纵性能影响更大;曹建等[10]对吊舱水下航行器的水动力特性及操纵性展开了分析研究。目前针对水下拖缆对水下航行器操纵性能的研究鲜见。
航行器拖曳拖缆时,由于航行器运动姿态的改变,拖缆拖曳点处的张力大小和方向时刻改变,因此建立拖缆- 水下航行器耦合运动模型来分析拖曳点处不断变化的张力对拖缆与航行器的相互影响是具有工程意义的。本文基于集中质量法建立拖缆的动力学方程,利用边界耦合条件,将拖缆首端产生的张力影响计入水下航行器的六自由度运动方程组,建立了拖缆- 水下航行器耦合运动模型,采用4阶Rung-Kutta数值积分算法,对比分析了拖缆对航行器直航、回转和下潜运动时的操纵性能影响。
1 数学模型的建立及求解
为便于由水下航行器和拖缆所组成的水下拖曳系统的运动学和动力学分析,选取并建立了如图1所示的3种坐标系,分别为地面坐标系SE(OExEyEzE)、拖缆局部坐标系SC(OCtnb)和航行器体坐标系SB(OBxyz)。

图1 水下拖曳系统坐标系Fig.1 Coordinate systems of underwater towed system
拖缆姿态角θi和φi定义如图2所示,其具体形式可表示为
式中:(xi,yi,zi)和(xi-1,yi-1,zi-1)分别为拖缆微元段首尾端点在地面坐标系下的坐标;li为拖缆微元段长度。

图2 拖缆微元段姿态角Fig.2 Euler angles of towed cable element

(1)
式中:

1.1 拖缆运动控制方程
基于集中质量法,参考文献[11]建立拖缆的数值求解模型。将拖缆从自由端离散为N个微元段,即N+1个集中质量点,拖缆集中质量点编号如图1所示。
对第i个集中质量点应用牛顿第2定律,得到第i个质量点的动力学方程为
(2)


ρc为拖缆密度,ρ为海水密度,σi表示拖缆第i个微元段的横截面积,ka为拖缆的附加质量系数,对于圆形截面的拖缆,ka=1.0.
拖缆第i个质量点的受力分析示意图如图3所示,并用Fi表示第i个质量点的合外力。
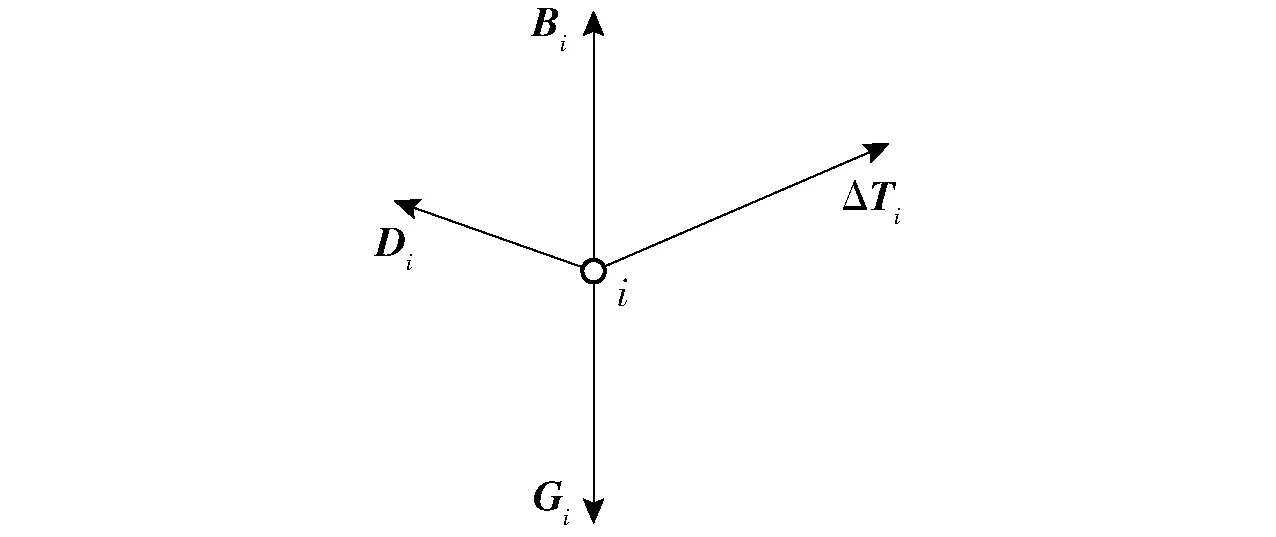
图3 第i个质量点的受力示意图Fig.3 Schematic diagram of force of the i-th mass point
由图3可知,第i个质量点所受到的合外力Fi主要包括拖缆张力ΔTi、重力Gi、浮力Bi和流体阻力Di,则合外力Fi表示为
Fi=ΔTi+Gi+Bi+Di,
(3)
式中参数具体表示如下:
1)通常,应变|ε|≪1,则利用应力- 应变关系可将拖缆张力与应变线性化处理,应用Hooke定律可得第i个质量点的张力:
(4)
Ti+1和Ti分别为第i+1个质量点和第i-1个质量点与第i个质量点之间的拖缆张力,τi为沿缆长方向上的单位切向量,E为拖缆的杨氏模量,εi为拖缆应变,其取值为
(5)
lo为拖缆微元段拉伸前的长度。
2)第i个质量点的重力和浮力可表示为
Gi+Bi=mig+ρσilig,
(6)
g为重力加速度。
3)采取Albow等[3]和Huang[4]都用到的方法,将拖缆的阻力处理为切向阻力和法向阻力,对于拖缆第i个质量点,其阻力表示为
(7)

1.2 水下航行器六自由度运动方程组
航行器运动参数与文献[12]中鱼雷的运动学参数一致。航行器体坐标系OBxyz下的广义速度参数表示为V=[vx,vy,vz,ωx,ωy,ωz]T,其中vx、vy和vz为航行器在体坐标系下的广义速度,即轴向速度、纵向速度和横向速度,ωx、ωy和ωz为航行器在体坐标系下的角速度分量。航行器体坐标系OBxyz下的广义力参数表示为F=[Fx,Fy,Fz,Mx,My,Mz]T,其中Fx、Fy和Fz以及Mx、My和Mz分别为航行器在体坐标系下的广义力和广义力矩分量。地面坐标系OExEyEzE下的广义位置参数表示为R=[xE,yE,zE,θ,ψ,φ]T.
基于质心动量定理和动量矩定理,建立水下航行器的动力学方程[13]:
(8)
式中:MRB和CRB(V)的具体形式分别为
MRB=
m为航行器质量,xc、yc和zc为航行器体坐标系下的质心坐标,Jxx、Jyy和Jzz以及Jxy、Jxz和Jyz分别为航行器的转动惯量和惯性积;F为航行器受到的各种力的矩阵,包括理想流体惯性力、浮力、黏性阻力和推进器提供的推力等。其中,推力FT始终沿着航行器的x轴正方向,其值由J-KT曲线确定,J为进速比,J=v/(nPD),v为航行器航速,nP为螺旋桨转速,D为螺旋桨直径。当确定进速比J后,通过J-KT曲线便可确定总推力系数KT,即KT是J的函数KT(J)。本文J-KT曲线通过计算流体力学数值模拟方法得到,KT(J)在所研究的进速比范围内可近似表示为
KT(J)=-0.073J2-0.291J+0.957,
(9)

为进行水下航行器运动仿真,还需建立描述航行器空间运动形式及规律的运动学方程:
(10)
式中:

联立动力学方程组(8)式和运动学方程组(10)式便建立了水下航行器六自由度运动方程组。
2 拖缆运动的边界条件
2.1 首端边界条件
拖缆的首端与航行器尾部拖曳点相连,航行器通过拖曳点处的张力作用带动拖缆运动,拖缆也会施加一个大小相同、方向相反的张力来影响航行器的运动。因而拖缆与航行器相互影响、相互作用。因此为建立拖缆- 航行器耦合运动模型,将拖缆首端边界条件分为航行器与拖缆的运动耦合边界条件,即拖缆顶端与航行器拖曳点处的位置及速度保持一致和动力耦合边界条件,即拖曳点处张力大小相同、方向相反,并将其融入到航行器的动力学方程(8)式[8]。拖缆的两种首端边界条件具体表示如下:

(11)
(12)
式中:(xB,yB,zB)为航行器浮心在地面坐标系下的位置;(xt,yt,zt)和(vxt,vyt,vzt)分别为拖曳点在航行器体坐标系下的位置和速度。
2)航行器与拖缆的动力耦合边界条件,将拖缆首端微元段的张力代入到航行器动力学方程中作为广义力的一部分,即T=[Tx,Ty,Tz,MxT,MyT,MzT]T,其在航行器体坐标系下具体表达式如下:
(13)
(14)
式中:lt为拖曳点沿航行器体坐标系x轴方向上到航行器浮心的距离;(TxE,TyE,TzE)为拖曳点处张力在地面坐标系下xE、yE和zE方向上的分量,其值确定为
(15)
TN为拖缆首端微元段处的张力,φN和θN为拖缆首端微元段姿态角。
2.2 末端边界条件
拖缆末端没有拖体为自由端,视末端为一集中质量点,运用拖缆动力学方程(2)式,得
(16)
式中:末端质量点的质量矩阵可表示为M0=(ρcσ0l0/2)I+ma0,ma0为拖缆末质量点的附加质量;合外力可表示为F0=T0+(ρ-ρc)σ0l0g+D0.
3 数值求解及动态运动仿真验证
3.1 数值求解
拖缆的动力学方程(2)式和速度的微分定义v=dx/dt组成了拖缆运动控制方程:
(17)
在此基础之上联立水下航行器动力学方程组(8)式和运动学方程组(10)式以及边界条件(11)式~(15)式,从而形成了整个拖曳系统完整的微分运动控制方程组。采用4阶Rung-Kutta积分算法对其进行求解计算。
3.2 动态运动仿真验证
为验证本文航行器- 拖缆耦合运动模型和仿真程序的正确性,采用Rispin[14]的海上拖缆拖曳实验工况作为算例,并与其实验结果作对比,同时与Millinazzo等[15]的仿真结果进行对比。
Rispin的实船拖缆实验示意图如图4所示,拖缆的具体物理参数如表1所示。拖缆总长1 027.8 m,分为6段,第1段为连接着拖船的引导拖缆,第2段~第5段为零浮力电缆,第6段为稳定尾绳。Rispin在拖缆第2段和第3段连接处以及第4段和第5段连接处设置了A和B两个监测点。

图4 拖曳系统示意图Fig.4 Schematic diagram of towed system

拖缆长度/m直径/m线密度/(kg·m-1)CtCn1723.000.0406401.5670.015002.028.230.0793755.0670.008981.8371.020.0793755.0670.008981.84156.360.0793755.0670.008981.8538.710.0793755.0670.008981.8630.480.0254000.5770.021681.8
仿真验证时取杨氏模量E=2.0×1010Pa,流体密度ρ=1 024 kg/m3. 图5给出了基于本文航行器- 拖缆耦合运动模型仿真得到拖曳系统以10 kn的速度稳态直航运动时拖缆姿态。当系统以10 kn的速度稳态直航运动时拖曳点处的抬升角为2.58°,Rispin实验数据为2.7°,Millinazzo等的仿真计算结果为2.6°. 同时表2给出了系统以18.5 kn的速度稳态直航时监测点A和B处的深度仿真结果与Rispin实验结果的对比。A点和B点的深度相对误差绝对值不超过5%,因此拖缆运动仿真结果与Rispin实验结果基本相符,从而验证了本文航行器- 拖缆耦合运动模型和仿真程序的正确性。

图5 拖缆稳态姿态Fig.5 Steady state configuration of towed cable

监测点Rispin实验值[14]本文计算值相对误差/%A12.1312.654.28B13.3813.10-2.09
4 仿真结果分析
4.1 拖曳系统参数
本文拖缆的参数设置见表3,拖曳载体水下航行器的参数如表4所示。

表3 拖缆参数
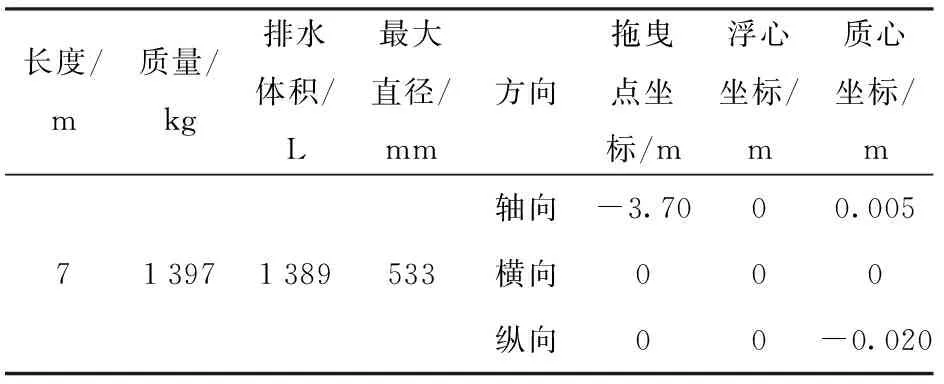
表4 水下航行器参数
4.2 拖曳系统运动仿真分析
4.2.1 航行器直航拖曳拖缆运动仿真分析
航行器直航拖曳拖缆时,航行器沿直线航行,假定海水为静水。拖缆对航行器的影响体现在拖曳点处拖缆的张力对航行器的作用。图6为航行器在不同航速下直航拖曳拖缆时拖曳点处的张力曲线。图7给出了航行器在螺旋桨不同转速下,加装拖缆和不加装拖缆从静止开始达到稳定航速时的轴向速度对比。由于航行器直线航行时攻角和侧滑角为0°,航行器纵向和横向速度分量为0 m/s,轴向速度亦为航行器的航速。从轴向速度曲线可以看出,航行器加装拖缆后,由于在拖曳点处拖缆对航行器张力作用,航行器的航速相较于不加装拖缆从静止达到相应转速下的稳定速度值有所减小。由表5可知,航行器螺旋桨转速越大,航行器加装拖缆后速度减小值越大,但不同转速下航行器的速度降幅都为21.3%.

图6 不同航速下拖曳点处张力Fig.6 Tension at towing point at different speeds

图7 水下航行器轴向速度曲线Fig.7 Underwater vehicle axial velocity curves

nP/(r·min-1)vx/(m·s-1)无拖缆有拖缆减小值/(m·s-1)改变量/%2152.2031.7340.469-21.32983.0532.4020.651-21.34084.1803.2880.892-21.3
4.2.2 航行器回转拖曳拖缆运动仿真分析
航行器回转拖曳拖缆的运动仿真是为了分析拖缆对航行器回转机动时的影响。图8给出了航行器回转拖曳拖缆时的运动轨迹。为具体分析回转过程中拖缆对航行器机动性的影响,分别进行了在同一垂直舵角δv为12°下的3个不同转速215 r/min、298 r/min和408 r/min以及同一转速nP为298 r/min下的3个不同垂直舵角4°、8°和12°的两组仿真计算。并选取比相应转速下不加拖缆时航行器稳定直航运动速度稍大值作为仿真计算初始值,以探究拖缆对航行器回转机动时的影响。
表6列出了在同一垂直舵角δv为12°和不同转速下航行器加装拖缆与不加拖缆稳态回转时的速度和转弯半径对比。从仿真结果可以看出航行器在回转过程中由于拖缆拖曳点处对其的张力作用,使得航行器稳态回转时轴向速度和横向速度相较于没有拖缆时有所下降,轴向速度改变量-17.5%~-17.6%,横向速度改变量-23.2%~-23.7%. 同时不同转速下的回转半径也有所减小,其减小幅度都为3.2%,这是由于航行器加装拖缆后,拖缆会施加一个使得航行器回转半径减小的力矩MyT.

图8 拖曳系统轨迹Fig.8 Trajectory of towed system

表6 同一垂直舵角不同转速下航行器有无拖缆稳态特性
为进一步分析拖缆对航行器回转机动时回转半径的影响,图9给出了航行器在同一转速nP为298 r/min下的3个不同垂直舵角4°、8°和12°的轨迹图。从图9可以看出,航行器以定转速不同垂直舵角回转拖曳拖缆时,其回转半径相较于不加装拖缆时的回转半径有所减小,不同舵角下的回转半径减小量都为3.2%,因而航行器加装拖缆后具有增加舵效的作用。

图9 水下航行器回转轨迹Fig.9 Turning trajectories of underwater vehicle
4.2.3 航行器下潜拖曳拖缆运动仿真分析
图10是航行器初速5 kn、转速325 r/min有、无拖缆下潜轨迹对比图。从轨迹对比可知,航行器下潜拖曳拖缆时要保证一定的转速,否则不能稳态下潜,不能完成定深运动。因此拖缆降低了航行器下潜稳定性。
为进一步研究拖缆对航行器稳态下潜操纵性能的影响,选取了转速分别为447 r/min和516 r/min来分析航行器下潜过程中拖缆对航行器的影响。图11给出了航行器加装拖缆在不同转速下定深范围为-1~-25 m时的下潜轨迹。可见,航行器下潜拖曳拖缆时,航行器稳态下潜时的弹道倾角Θ绝对值相较于不加装拖缆时会减小。由表7可知,转速越小,弹道倾角的绝对值降幅越大。转速为447 r/min时,|Θ|降幅为15.2%;转速为516 r/min时,|Θ|降幅为9.6%.

图10 水下航行器下潜轨迹Fig.10 Dive trajectories of underwater vehicle

图11 水下航行器下潜轨迹Fig.11 Dive trajectories of underwater vehicle

表7 水下航行器稳态下潜速度及弹道倾角对比
同时由表7可知:航行器加装拖缆后其轴向速度会减小,其减小幅度约为21%;纵向速度会增大,增大幅度为26.3%左右,这是由于航行器加装拖缆后航行器稳态下潜过程中的攻角绝对值相较于不加拖缆时会增大,如图12所示,从而导致其纵向速度分量增大。但由于纵向速度相较于轴向速度值较小,因而航行器的航速变化趋势与轴向速度一致。

图12 水下航行器下潜时攻角曲线Fig.12 Angle of attack curves for underwater vehicle diving
航行器下潜拖曳拖缆时航行器弹道倾角Θ绝对值的减小使得航行器下潜达到定深的距离就会增加,同时航行器航速的减小使得航行器达到预定深度的时间会增加,因而拖缆会降低航行器的下潜性能。
5 结论
本文基于集中质量法建立了拖缆的动力学方程,利用边界耦合条件,将拖缆首端产生的张力影响计入水下航行器的六自由度运动方程组,建立了拖缆- 水下航行器耦合运动模型,采用4阶Rung-Kutta数值积分算法,对比分析了拖缆对航行器直航、回转和下潜运动时的操纵性能影响。所得主要结论如下:
1)拖缆降低了航行器直航、回转和下潜运动速度。
2)拖缆减小了航行器回转半径,有增大舵效的作用。
3)拖缆降低了航行器的下潜稳定性,且减小了航行器弹道倾角的绝对值,增大了航行器到达预定深度的距离,同时由于航速的降低,导致航行器达到预定深度的时间会增加,因而拖缆也降低了航行器的下潜性能。
猜你喜欢
遗传(2022年9期)2022-10-10
大电机技术(2022年3期)2022-08-06
少儿科技(2022年4期)2022-04-14
导航定位学报(2022年2期)2022-04-11
煤气与热力(2021年4期)2021-06-09
马克思主义哲学研究(2021年2期)2021-06-05
学生天地(2020年31期)2020-06-01
中华戏曲(2020年1期)2020-02-12
中华诗词(2018年4期)2018-08-17
数学大世界(2018年1期)2018-04-12
