新型双活塞磁流变阻尼器的理论分析与实验研究
2015-05-24 16:14陈照波AhmadianMehdi刘文涛
振动与冲击 2015年21期
王 强,陈照波,Ahmadian Mehdi,刘文涛
(1.哈尔滨工业大学机电工程学院,哈尔滨 150001;2.弗吉尼亚理工大学机械工程系,黑堡VA24061,美国)
新型双活塞磁流变阻尼器的理论分析与实验研究
王 强1,陈照波1,Ahmadian Mehdi2,刘文涛1
(1.哈尔滨工业大学机电工程学院,哈尔滨 150001;2.弗吉尼亚理工大学机械工程系,黑堡VA24061,美国)
针对空间柔性桁架结构振动半主动控制的需要,提出了一种重量轻、结构紧凑的双活塞磁流变阻尼器。基于磁流变液流变特性和流体动力学理论,通过分析阻尼器节流通道内的流场情况,建立了阻尼力与活塞速度之间的关系。给出了适用于阻尼器初始设计的简化阻尼力计算方法,准静态测试的结果验证了计算方法的正确性。针对动态测试实验结果中输出力在去程和回程的不对称问题,提出了一种改进的非对称双曲正切模型。结果表明,改进模型能够准确描述新型阻尼器的动力学特性,在去程和回程都有很高的建模精度。
磁流变阻尼器;磁流变液;Bingham模型;非对称双曲正切模型
根据结构型式和所使用磁流变液的工作模式,现有磁流变阻尼器可以归纳为如图1所示的四种基本构型:双出杆剪切阀式[1],单出杆剪切阀式[2],单出杆流动式[3]和旁路流动式[4],其他的磁流变阻尼器绝大多数可以认为是上述四种基本构型的变种[5]。例如,车辆工程中常用的双筒型磁流变阻尼器[6],可以认为是在单出杆流动式的基础上,将蓄能器置于内筒和外筒之间而得到的一种变体。四种基本构型中最常用的是双出杆剪切阀式和单出杆流动式。现有磁流变阻尼器的共同特点是可以输出很大的阻尼力,同时有较大的行程,一般用于大型建筑、土木结构以及机械设备的振动半主动控制。但是针对空间微重力环境下的轻质柔性桁架结构[7],其振动半主动控制对阻尼器的输出力大小要求不高,但是对阻尼器的重量和结构尺寸有严格要求的情况下,现有的磁流变阻尼器由于重量和尺寸过大而不再适用。
为了满足重量轻和结构紧凑的要求,本文提出一种新型结构的磁流变阻尼器。在对节流通道内的磁流变液进行流体力学分析的基础上,给出阻尼力的计算公式。通过实验方法对自制新型阻尼器进行测试,验证阻尼力计算公式,并获得阻尼器的非线性滞后特性曲线。基于实验曲线,建立适用于新型阻尼器动态分析与控制的动力学模型。
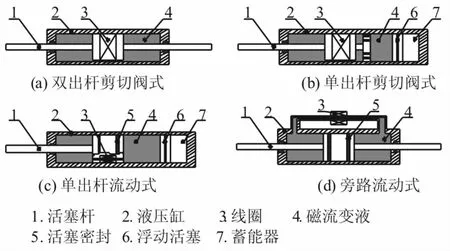
图1 磁流变阻尼器的四种基本构型Fig.1 Four MR damper basic configurations
1 新型双活塞磁流变阻尼器
提出的新型双活塞磁流变阻尼器[8]的结构如图2所示,阻尼器有左、右两个动密封活塞,与外套管之间采用O型圈动密封;线圈活塞用于连接两个动密封活塞;线圈缠绕在线圈活塞上,引线通过左侧活塞引出;外套管和活塞杆分别与被控结构相连。当活塞杆与外套管之间相对运动时,磁流变液被迫通过环形节流通道在左、右腔室之间交换流动,在线圈产生的磁场作用下产生可控阻尼力。磁流变液工作在包含流动模式和直接剪切模式的混合模式下,也称为剪切阀式。
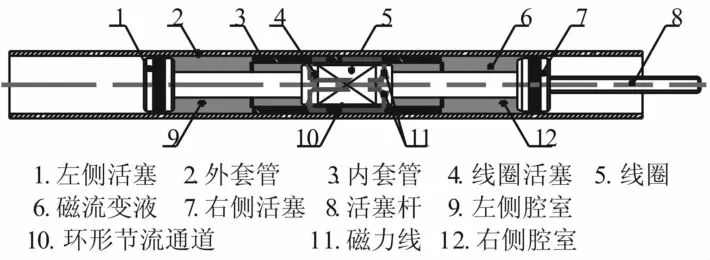
图2 新型双活塞磁流变阻尼器结构图Fig.2 Schematic of the double-piston MR damper
除了内套管和线圈活塞需要采用导磁材料制造外,其他零件可以选用高强度、轻质非磁性材料制造,以最大限度降低阻尼器自身重量。外套管和内套管之间为过盈配合,装配采用热装法完成,这样可以减少零件数量,压缩阻尼器径向尺寸。所有零件都被置于外套管内,阻尼器外形规则,有利于在被控结构中的布置。与现有阻尼器相比,新型双活塞磁流变阻尼器特别适于空间微重力环境下轻质柔性桁架结构振动半主动控制。
2 稳态流体动力学分析
2.1 节流通道内的磁流变液
在图1所示的双出杆剪切阀式[1]和单出杆剪切阀式[2]磁流变阻尼器中,磁流变液流动方向与活塞运动方向相反,稳态流体动力学分析时速度边界条件的一侧为活塞速度v0,另一侧为0,如图3(a)所示;在单出杆流动式[3]磁流变阻尼器中,磁流变液流动方向和运动方向也是相反的,速度边界条件两侧对称,同为活塞速度v0,如图3(b)所示;而在旁路流动式[4]磁流变阻尼器中无相对运动,速度边界条件两侧同为0,如图3 (c)所示;而新型阻尼器中,节流通道内磁流变液的流动方向与活塞运动速度方向相同,速度边界条件如图3 (d)所示。其中,第四类速度边界条件是新型阻尼器所特有的,尚没有相关文献对其进行分析。速度边界条件的不同会造成节流通道内流速分布的不同,最终影响阻尼力。因此,首先需要对新型阻尼器节流通道内的流速和剪切应力的分布进行分析。
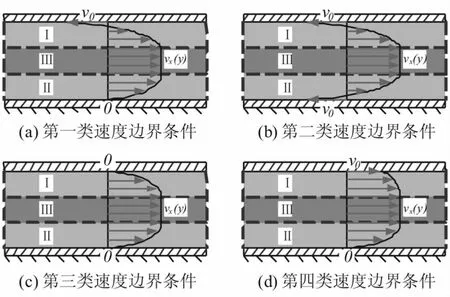
图3 磁流变阻尼器的四类速度边界条件Fig.3 Four types velocity boundary conditions
在外加磁场作用下,磁流变液的流动特性可用Bingham塑性模型表达

式中,τ为磁流变液的剪切应力;τ0为剪切屈服应力,与磁场强度有关为剪切应变率;η为磁流变液零磁场粘度。
由于活塞直径远大于节流通道间隙,可以使用平板模型对磁流变液流速和剪切应力进行分析。如图4所示,平板间隙h=R2-R1,平板宽度w=π(R1+R2)。其中,R1为线圈活塞外半径,R2内套管内半径。
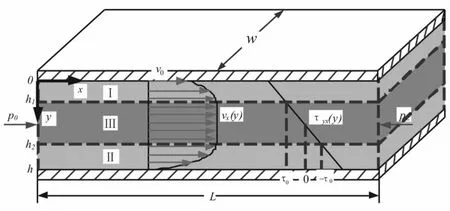
图4 平板间的流速和剪切应力分布Fig.4 Stress and velocity profiles through the parallel duct
假设磁流变液在压差下做一维层流流动,忽略惯性力和体积力,流体基本力学方程Navier-Stokes的x方向项简化为:

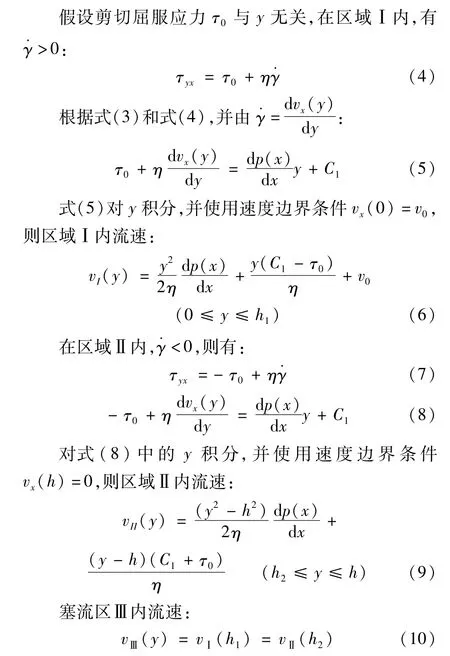
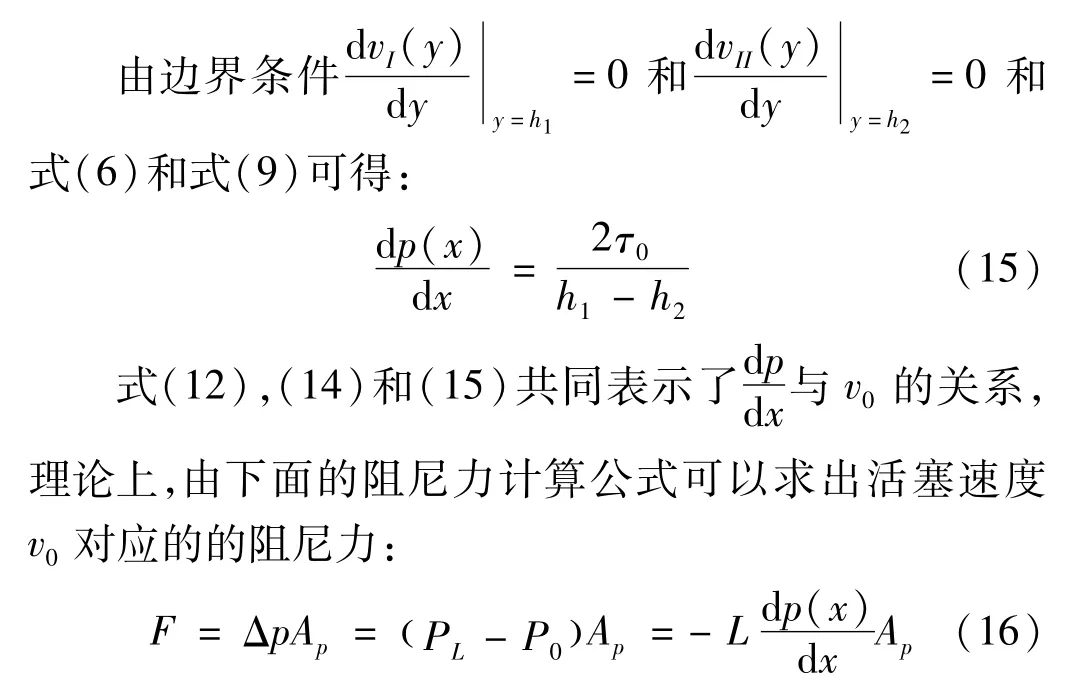
2.2 压力梯度与活塞速度的关系
将τyx(h1)=τ0和τyx(h2)=-τ0代入式(3)可以求出积分常数C1:

根据速度边界条件vⅠ(h1)=vⅡ(h2),综合式(6)和式(9),并将式(11)代入,可得:

2.3 无量纲化与阻尼力计算公式
在阻尼器的初始设计阶段,为了简化计算,定义无量纲速度V,无量纲压力梯度P,无量纲屈服强度T分别为:
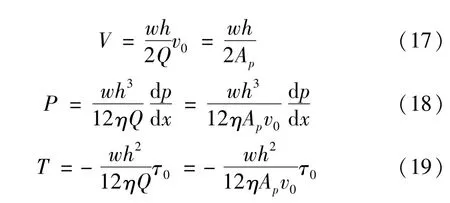
注意到,此处无量纲速度V的符号与文献[1]中的相反。
式(20)可以通过数值方法求解。在实用的磁流变阻尼器设计参数的范围内[1],无量纲参数之间的关系可以用下式近似表示:

阻尼力可以由下式求得:

3 自制新型阻尼器及其测试
3.1 自制新型阻尼器
基于提出的新型双活塞结构,制作完成的磁流变阻尼器重量为82 g(充液后),外径为16 mm,行程为15 mm。其他主要参数:线圈活塞外径为12.22 mm,内套管内径为12.58 mm,外套管内径为14.22 mm,有效节流长度L为10.16mm。线圈长度为10.16 mm,线径为0.321 mm,匝数为110,电阻为1.1Ω。所使用的磁流变液来自美国Lord公司,型号为MRF-122EG。组装前和完成组装的新型双活塞磁流变阻尼器如图5所示。
图5 自制新型双活塞磁流变阻尼器Fig.5 The double-piston MR damper prototype
3.2 实验装置
磁流变阻尼器具有强非线性特性,理论计算不能完全准确地获得其实际工作性能,需要采用实验方法对其进行研究。实验测试分为准静态测试和动态测试。准静态测试可以获得阻尼器输出力与活塞速度之间的关系曲线。动态测试可以获得输出力-位移和输出力-速度曲线。测试所采用的实验装置见图6,新型阻尼器通过夹具安装在阻尼器试验机上,试验机使用电磁驱动器对阻尼器进行激励,固定在横梁和阻尼器之间的力传感器测量力信号,通过直流电源对阻尼器进行供电。数据采集系统可以对试验机进行控制,并对获取的实验数据进行处理。
图6 新型阻尼器实验装置图Fig.6 Experimental setup for the prototype damper
3.3 准静态测试
准静态测试过程中,使用正弦信号进行激励,采集活塞通过平衡点时,最大速度和对应的阻尼力。通过改变激励频率和幅值来改变最大速度,五次循环取平均值作为测试值。改变驱动电流,就可以测得阻尼器在不同驱动电流下,一定速度范围内的输出力-速度曲线。这组曲线可以反映阻尼器输出力的大小和随速度的变化趋势,可以用于阻尼力计算公式的验证。
测得的输出力主要包含磁流变液流过节流通道产生的阻尼力和动密封产生的摩擦力两部分。在完成阻尼器输出力测试后,将其中的磁流变液倒出,采用与输出力测试相同的方法,对阻尼器的摩擦力进行测试。将相同活塞速度下输出力值减去摩擦力值就可以得到阻尼力的实测值。最终得到的实测输出力和摩擦力与活塞速度之间的关系曲线如图7所示。
相同驱动电流时,输出力随活塞速度的增大而增大,这反映的是节流通道内磁流变液的黏性阻尼特性;相同活塞速度时,输出力随驱动电流的增大而增大,这反映的是磁流变液屈服强度随磁场变化的塑性特性。摩擦力随速度有下降趋势,而且速度逐渐减缓。
3.4 阻尼力计算公式的验证
节流通道内磁场强度除了跟驱动电流有关外,还跟阻尼器结构和线圈参数以及磁流变液的磁化曲线等许多参数有关。本研究中首先借助磁场有限元分析软件FEMM求出特定驱动电流I下节流通道内磁场强度H。再根据图8中所示的磁流变液磁场强度H与剪切屈服应力τ0之间的实验特性曲线得到对应的剪切屈服强度τ0。表1为不同驱动电流I下,磁场强度值H和对应的剪切屈服应力τ0的值。
根据阻尼器的结构参数和磁流变液参数,由式(21)和式(22)就可以求出特定驱动电流下,不同活塞速度对应的阻尼力。图9为不同驱动电流下,准静态条件下实测阻尼力与计算阻尼力曲线。可以看出,通过前述阻尼力计算公式可以较为准确地计算出新型阻尼器在不同驱动电流和活塞速度下的阻尼力。

图7 准静态测试条件下实测输出力和摩擦力与速度的关系Fig.7 Measured output and friction force versus piston velocity

图8 MRF-122EG磁流变液磁场强度H与剪切屈服应力τ0之间的实验特性曲线Fig.8 Tested H versusτ0curve for MRF-122EG

图9 准静态测试条件下阻尼力实测值与计算值的比较Fig.9 Measured and calculated damping force
表1 不同驱动电流I下磁场强度H与剪切屈服应力τ0值Tab.1 Calculated H andτ0under different I
同时注意到,在不同的驱动电流下,实测阻尼力-速度曲线的斜率都要大于对应的计算值曲线。分析后认为,这主要是因为摩擦力的测试条件与阻尼器实际工作条件有差异,O型圈处于不同的工作状态所导致的。O型圈在沟槽中受磁流变液压力作用下产生变形,被挤向间隙位置,达到密封效果。当活塞运动速度增大时,磁流变液产生的压力随之增大,迫使O型圈发生更大的变形,获得更紧的密封,而这会导致更大的摩擦力。摩擦力测试时,由于只保留少量磁流变液作为O型圈与外套管内壁之间的润滑剂,因此没有上面描述的摩擦力随活塞速度增大而增大的现象,反而出现了下降的趋势,如图7所示。也就是说,实测摩擦力要小于正常工作时的摩擦力,而且活塞速度越大,差值越大,反映在阻尼力-速度曲线上就是实测阻尼力曲线的斜率要稍大于理论计算值曲线。
3.5 动态测试
前述阻尼力计算公式和准静态测试结果,不能反映磁流变阻尼器的动力学特性,尤其是明显的输出力-速度滞后特性。因此,需要对自制阻尼器进行动态测试,以获得阻尼器的动力学特性曲线,为后续阻尼器动力学建模与控制提供条件。
测试时同样使用正弦信号作为激励,记录阻尼器去程和回程整个循环内的活塞位移、速度和对应的输出力。取不同的激励幅值和频率组合,改变驱动电流,就可以得到不同激励条件和驱动电流下的阻尼器输出力-位移和输出力-速度特性曲线。
4 新型阻尼器的非对称建模
4.1 非对称双曲正切模型
图10中动态测试结果表明,新型阻尼器具有典型的磁流变阻尼器的动力学特性。其输出力-速度曲线存在明显的两个区域:屈服前区和屈服后区;其中在屈服前区存在明显的滞后,并且滞环的大小随驱动电流增大而增大;在屈服后区存在明显的局部滞环。与现有磁流变阻尼器不同的是,新型阻尼器的输出力在去程和回程有明显的差异,尤其是在屈服后区,输出力-速度曲线的斜率明显不同,并且去程存在明显的局部滞环,而回程则不明显,而且随着驱动电流的增大,不对称性有增大的趋势。一般的磁流变阻尼器参数化模型在一个周期内的输出力是对称的[9-10],也就是假设阻尼器在去程和回程具有相同的特性。Kwok等[11],探讨了一种基于Bouc-Wen模型的速度滞回曲线不对称修正方法,引入了一个修正参数,对速度进行修正,其针对的区域是屈服前区和屈服后区转换点附近。Wang等[12]提出了一种不对称阻尼力产生算法,实现了不对称速度滞回曲线的建模,其中不对称性主要体现在屈服前区滞回曲线的高度和位置。而本研究中新型阻尼器的不对称性主要表现在屈服后区,包含速度滞回曲线的斜率和局部滞环两方面问题。因此,提出一种新的参数化模型来实现新型阻尼器的精确建模。
磁流变阻尼器的双曲正切模型,不但能够准确描述阻尼器屈服前区和屈服后区特性,而且形式简单、计算效率高,同时模型参数与实验曲线有较为明确的对应关系[13-14]。在一定条件下,其建模精度可以高于Bouc-Wen,修正的Bouc-Wen,修正的Dahl和修正的LuGre等模型[14]。基于双曲正切模型,本文提出一种改进的非对称双曲正切模型,实现对阻尼器的去程和回程输出力分别进行建模,模型的表达式为:

式中,c,c′分别为黏性系数和其修正系数,它们的作用是调整屈服后区速度滞回曲线的斜率;k、k′分别为弹性系数和其修正系数,用于调整屈服后区的局部滞环;α为滞环的尺寸系数,β和δ为滞环形状系数,保证去程和回程有相同的滞环高度、斜率和宽度;f0、f′0分别为输出力补偿系数和其修正系数。
为了保证曲线在去程和回程连接处的平滑过渡,三个修正系数之间需要满足以下条件:

4.2 模型参数辨识
首先使用整个周期内的实验数据对双曲正切模型进行参数辨识,获得的参数值作为改进模型参数辨识的初始值,提高计算的效率。根据阻尼器动态测试数据,使用非线性最小二乘法辨识出的模型参数见表2。
4.3 建模结果讨论
对应不同的驱动电流,使用辨识后的非对称双曲正切模型和实测速度、位移值计算出的输出力和实测输出力的对比见图10。

表2 非对称双曲正切模型辨识参数Tab.2 Identified asymmetric model parameters

图10 动态测试条件下实验数据与模型计算结果对比Fig.10 Comparison ofmeasured and reconstructed curves under dynamical testing condition
以驱动电流为0.8 A时的输出力-速度曲线为例,由图可以明显看出,实验数据在去程和回程存在明显不同,去程实验曲线在屈服后区存在明显的局部滞环,而在回程则没有,屈服后区曲线的斜率也明显不同。不管采用何种对称模型,均相当于在去程和回程曲线之间的折衷,这会造成整个周期内建模的不准确。而采用非对称双曲正切模型就可以同时兼顾去程和回程特性。
由图10(a)和(b)可以看出,模型计算结果不仅准确描述了屈服前区和屈服后区的实验数据曲线,而且对去程实验数据曲线存在的局部滞环,以及屈服前、后区转换处曲线交叉点的位置描述同样十分精确。
5 结 论
为了满足空间柔性桁架结构振动半主动控制对作动器的需要,提出了一种双活塞磁流变阻尼器。基于平板模型假设,建立了阻尼力与活塞速度、阻尼器结构参数和磁流变液参数之间的关系,给出了阻尼力计算方法。设计实验完成了自制新型阻尼器的准静态和动态测试。提出了一种非对称模型描述阻尼器的非线性动力学特性。
(1)基于新型双活塞结构的自制磁流变阻尼器重量仅82 g,外径16 mm,电流0.8 A时,阻尼力最大可达80 N。在保证了阻尼器重量轻和结构紧凑的前提下,阻尼力达到了空间桁架结构振动控制的要求。
(2)自制新型阻尼器的准静态测试结果验证了阻尼力计算方法的正确性。
(3)提出的非对称双曲正切模型可以准确描述阻尼器动力学特性,同时提高了阻尼器输出力在去程和回程的建模精度。
[1]Yang G,Spencer B F,Carlson JD,et al.Large-scale MR fluid dampers:Modeling and dynamic performance considerations[J].Engineering Structures,2002,24(3):309-323.
[2]Hu H S,Jiang X Z,Wang J,et al.Design,modeling,and controlling of a large-scalemagnetorheological shock absorber under high impact load[J].Journal of Intelligent Material Systems and Structures,2012,23(6):635-645.
[3]Dyke S J,Spencer B F,Sain M K,et al.Modeling and control of magnetorheological dampers for seismic response reduction[J].Smart Materials&Structures,1996,5(5):565-575.
[4]Cook E,Hu W,Wereley N M.Magnetorheological bypass damper exploiting flow through a porous channel[J].Journal of Intelligent Material Systems and Structures,2007,18 (12):1197-1203.
[5]Zhu X C,Jing X J,Cheng L.Magnetorheological fluid dampers:A review on structure design and analysis[J].Journal of Intelligent Material Systems and Structures,2012,23(8):839-873.
[6]石秀东,钱林方,徐亚栋.双筒磁流变阻尼器动力学特性研究[J].振动与冲击,2007,(10):41-44.
SHI Xiu-dong,QIAN Lin-fang,XU Ya-dong.Study on dynamic characteristics of a twin tube magneto-rheological damper[J].Journal of Vibration and Shock,2007,(10):41-44.
[7]Huo L S,Song G B,Nagarajaiah S,et al.Semi-active vibration suppression of a space truss structure using a fault tolerant controller[J].Journal of Vibration and Control,2012,18(10):1436-1453.
[8]陈照波,迈迪·阿马迪安,王强,等.增加动态输出力可调范围的紧凑型轻量化的磁流变阻尼器[P].中国,发明专利,201110420869.8,2013.12.25.
[9]Wang D H,Liao W H.Magnetorheological fluid dampers:A review of parametric modelling[J].Smart Materials&Structures,2011,20(2):023001-023034.
[10]邓志党,高峰,刘献栋,等.磁流变阻尼器力学模型的研究现状[J].振动与冲击,2006,25(3):121-126.
DENG Zhi-dang,GAO Feng,LIU Xian-dong,etal.State-ofart research on dynamical,models of magnetorheological damper[J].Journal of Vibration and Shock,2006,25(3):121-126.
[11]Kwok N M,Ha Q P,Nguyen M T,et al.Bouc-wen model parameter identification for a MR fluid damper using computationally efficient ga[J].Isa Transactions,2007,46(2):167-179.
[12]Wang E R,Wang W J,Wang H,et al.Describing asymmetric hysteretic F-V characteristics of a MR damper resulted form symmetric MR damper[J].Journal of Nanjing Normal University(Engineering and Technology Edition),2008,8(1):1-6.
[13]Kwok N M,Ha Q P,Nguyen TH,et al.A novel hysteretic model for magnetorheological fluid dampers and parameter identification using particle swarm optimization[J].Sensors and Actuators a-Physical,2006,132(2):441-451.
[14]Sahin I,Engin T,Cesmeci S.Comparison of some existing parametricmodels formagnetorheological fluid dampers[J].Smart Materials&Structures,2010,19(3):035012-035022.
Analysis and tests for a novel double-piston MR damper
(1.School of Mechatronic Engineering,Harbin Institute of Technology,Harbin 150001,China;2.Department of Mechanical Engineering,Virginia Polytechnic Institute and State University,Blacksburg VA24061,USA)
Here,a novel double-piston magnetorheological(MR)damper was proposed,its lightweight and compact size featuresmade it especially suit for lightweight space flexible truss structures'vibration semi-active control.The fluid dynamic analysis of the damper was conducted using Bingham plastic model and the fluid dynamics theory.Based on a proper hypothesis,a simplified damping force calculation method fit for preliminary design phase was proposed.Testswere designed and performed to obtain the damper's hysteretic behavior under different drive currents.Aiming at the damper tests'output force asymmetry problem at go stroke and return-one,an improved asymmetric hyperbolic tangentmodelwas presented.Comparative study results showed that the improved model can describe precisely the dynamic hysteretic behavior of this double-piston MR damper under different drive currents;it has a highermodeling accuracy at go-stroke and return-one simultaneously.
magnetorheological(MR)damper;magnetorheological fluid;Bingham model;asymmetric hyperbolic tangentmodel
TB383;O373
A
10.13465/j.cnki.jvs.2015.21.025
国家自然科学基金资助项目(10972065;11372083)
2014-07-04 修改稿收到日期:2014-10-11
王强男,博士生,1985年2月生
陈照波男,博士,教授,1967年4月生
WANGQiang1,CHEN Zhao-bo1,AHMADIAN M2,LIUWen-tao1
猜你喜欢
疯狂英语·初中天地(2022年9期)2022-08-29
施工技术(中英文)(2022年9期)2022-06-21
建材发展导向(2022年5期)2022-04-18
广东建材(2022年3期)2022-04-13
汽车工艺师(2021年7期)2021-07-30
兰州理工大学学报(2021年3期)2021-07-05
北京理工大学学报(2020年11期)2020-12-15
鸭绿江·华夏诗歌(2020年4期)2020-06-15
诗潮(2018年5期)2018-08-20
振动、测试与诊断(2017年5期)2017-11-07