一种反向响应时滞过程的二自由度控制方法
2015-05-25 00:29徐广治张井岗
太原科技大学学报 2015年3期
徐广治,张井岗
(太原科技大学电子信息工程学院,太原 030024)
一种反向响应时滞过程的二自由度控制方法
徐广治,张井岗
(太原科技大学电子信息工程学院,太原 030024)
针对反向响应时滞系统,基于改进的二自由度(2-DOF)Smith预估器控制结构提出一种内模控制器设计的方法。这种结构使系统的跟随性能和干扰抑制性能解耦,设定值跟随控制器结合了Smith预估控制器和内模控制器的优点,干扰抑制控制器提高了系统的抗干扰能力和鲁棒性,克服了传统Smith预估器的不足。理论分析和仿真结果表明了该文方法使系统具有良好的设定值跟随性能、干扰抑制性能和良好的鲁棒性。
反向响应;二自由度控制;Smith预估控制
反向响应过程普遍存在于化工过程中。例如精馏塔中汽泡锅炉的液位、放热反应器的出口温度等[1]。其主要特征是:在阶跃响应的开始阶段,系统的响应方向与最终的响应方向相反。这种现象是由于反向响应的传递函数存在奇数个右半平面的零点(RHP)造成的[2],并且在工业中反向响应过程通常带有时滞环节,所以用一般的方法控制反向响应时滞过程难度比较大。
由于反向响应时滞过程不易控制,许多学者对此进行了研究,提出了多种控制器的设计方法。目前,主要有两类控制器设计方法:第一类是PI(PID)控制器,此类控制器控制参数不易整定并且不能同时获得良好的跟随特性和干扰抑制特性[3-5]。众所周知内模控制具有内稳定性和具有唯一可调参数的优点,所以本文在smith预估控制器的基础上提出一种逆用内模控制器设计的方法,以提高系统的跟随特性。第二类是基于模型的反向响应补偿器,大多数反向响应补偿器是基于Smith预估器设计的。然而,这类方法系统的干扰抑制性能差并且不能使系统同时获得良好的跟随特性、干扰抑制特性和鲁棒性[6-8]。本文采用二自由度控制(2DOF)方法[9],使系统的跟随性能和干扰抑制性能解耦,可以分别调节系统的设定值跟随特性和干扰抑制特性,从而使系统同时获得良好的跟随特性和干扰抑制特性,并提高系统的鲁棒性。
1 反向响应过程对象的基本特性
在过程控制领域,最典型的反向响应过程是由两个相反作用的一阶惯性环节构成的,如图1所示,其中:K1、K2、T1和T2均为正数,K1和K2分别为两个惯性环节的比例增益;T1和T2分别为惯性时间常数;由图1可得反向响应过程对象的开环传递函数为:

如果Tz>0,则传递函数就有一个右半S平面的零点。

图1 典型反向响应过程Fig.1 A typical inverse response process
当阶跃信号加在过程对象的输入端时,在过程输出的起始阶段,过程2的响应速度比较快,起主导作用,随着时间的推移,过程1的输出逐渐大于过程2,总的响应曲线的方向开始朝着相反的方向变化,最终过程1的稳态值大于过程2的稳态值。
另外,考虑到实际过程响应一般都包含时滞,因此为不失一般性,反向响应时滞过程对象的传递函数可以表示为:

2 内模控制器Gc(s)和滤波器F(s)的设计
带有滤波器的Smith预估器如图2所示:

图2 带有滤波器的Smith预估器Fig.2 Structure of the filtered Smith predictor
其中:r、d和y分别为设定值输入、干扰输入和系统输出。Gp(s)和Gm(s)分别为被控对象和被控对象模型。把被控对象模型Gm(s)分解成最小相位和非最小相位Gm0(s)和Gm1(s)两部分。Gc(s)为传统的Smith预估结构的控制器,可以提高系统的设定值跟随特性,F(s)为反馈回路增加的滤波器可以提高系统的干扰抑制能力和鲁棒性。
2.1 设定值跟随控制器Gc(s)的设计
当模型精确时,系统设定值跟随响应的闭环传递函数为:可化解为:


当模型精确且d=0时,图2可以等效成图3.

图3 模型精确时等效的系统结构Fig.3 Equivalent structure under accurate model condition
如图3所示,等效后系统的非最小相位部分已经被移出闭环系统,因此,控制器设计只考虑最小相位部分,使控制器设计变的简便。图3中虚线框中的闭环传递函数为:

内模控制器具有一个可调参数,参数整定方便简单,控制器Gc可以用内模控制器设计方法,由内模控制原理可以把虚线框中H部分展开成内模控制器结构则:
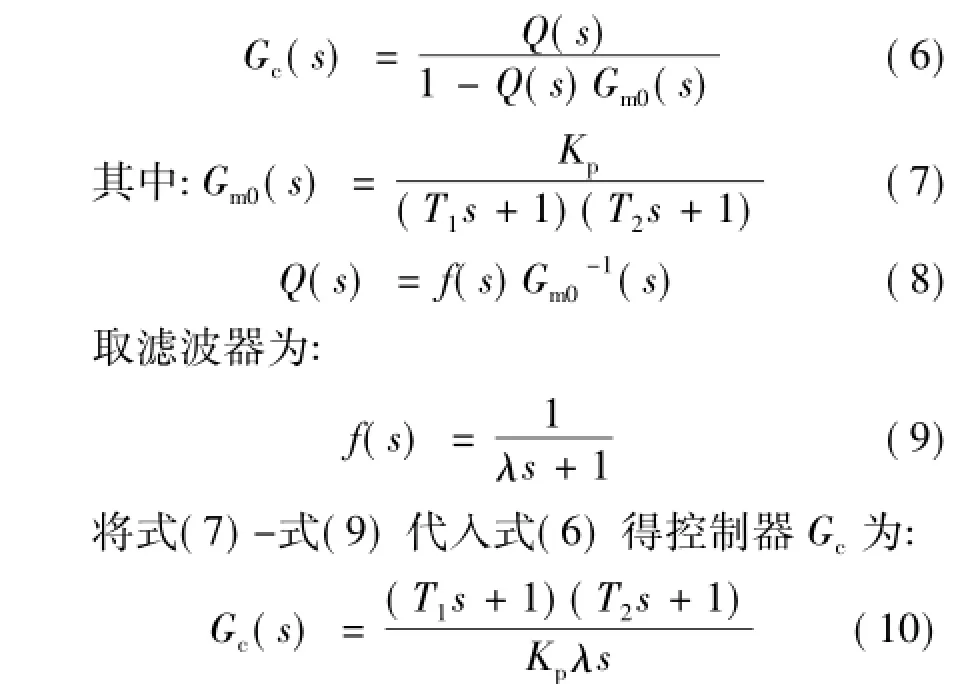
2.2 滤波器F(s)的设计
“器用”和“艺用”,即实用和审美,是研究工艺美术无法绕开的话题。因为,实用性是工艺美术作品与纯艺术作品最根本的区别。这在“漆艺”中表现得十分明显。“漆艺”可以与其它工艺美术门类相配合,为它们做器表装饰,也可以作为独立的器具,它还可以是纯美术意义上的漆画、漆雕塑作品。回溯历史,“器用”和“艺用”的轮回是贯穿整个历史的。而今,我们站在新的历史节点研究现代立体漆艺,仍然无法跳脱“器用”和“艺用”等问题的讨论。不论我们是否将之看作偏向纯艺的创作,即“艺用”之物。曾经的“器用”和“艺用”相互交织的漆艺创作史,前辈们在塑型、髤漆等方面的技术经验和审美认识,都是我们不应抛却的丰厚资源。
滤波器F(s)用于提高系统抗干扰性和鲁棒性,设计F(s)的一个目的是使系统的设定值跟随特性和干扰抑制特性解耦,使得Gc(s)为设定值跟随控制器,F(s)为干扰抑制控制器。
如图1所示系统干扰抑制响应的闭环传递函数为:

从式(11)得出,如果η(s)越接近零则系统的干扰抑制性能越好。所以滤波器F(s)的设计要遵循两个条件:a.设计F(s)使系统的设定值跟随特性和干扰抑制特性解耦;b.设计F(s)使:η(s)=[1-(Gc(s)Gm(s)F(s))/(1+Gc(s)Gm0(s))]渐进等于0.把式(2)和式(10)代入式(12)化解得:

参数β选为λ使系统的干扰抑制性能只和滤波器F(s)有关,实现了跟随特性和干扰抑制特性的解耦。所以F(s)为:

将式(2)、式(10)、式(15)代入式(11)可得:

由式(16)可以看出系统的干扰抑制性能只和参数ε有关。
3 鲁棒性分析
滤波器参数改变不仅影响系统的干扰抑制特性还影响系统的鲁棒性。若模型不精确,设δGp(s)为模型乘性不确定性,则有:

根据文献[10]有式(18)成立:


系统鲁棒稳定的条件为:

从式(20)得出,系统的鲁棒性只和滤波器F(s)有关。将式(7)、式(15)代入式(20)化简得:

若增大滤波器F(s)参数ε,则系统的鲁棒性提高,但会使系统干扰抑制响应变慢。因此,选择合适的参数ε使其兼顾系统的鲁棒性和干扰抑制特性。模型不确定性程度越大也就是δGp(s)越大,参数ε值越大,相应系统的干扰抑制响应越慢。
4 仿真实例
例:考察文献[11]中的二阶反向响应时滞对象:

本文与Chen[5]、Jyh-Cheng Jeng[11]和Chien[4]提出的方法进行了对比。考虑比较的公平性,各种方法在模型精确的情况下取相同的ISE指标值,比较各种方法在模型失配时ISE指标值的大小。ISE的定义如下:

选取参数λ=3.97,ε=6.7,系统在t=0时输入单位阶跃信号,在t=40时输入干扰信号d(t)= -0.5(t-40).图4为在模型精确时系统的输出响应。

图4 模型精确时系统的输出响应Fig.4 The output response of system under accurate model condition

图5 模型失配时系统的输出响应Fig.5 The output response of system under mismatched model condition

表1 ISE性能指标比较Tab.1 Comparison of ISE performance index
图5为模型失配时(参数T1,T2减小20%,a,kp,τ各增大20%),系统输出响应。表1列出了各种方法的性能指标。
从上述结果可以看出,在模型失配时,本文提出的方法系统响应曲线更快的稳定,震荡幅度更小,鲁棒性优于其他方法。
5 结论
针对反向响应时滞过程,本文提出了一种简单有效的二自由度控制方法。设定值跟随控制器既具有Smith预估控制器对时滞过程补偿的作用,同时也具有内模控制器的单参数易整定的优点。反馈回路中的滤波器使得系统的设定值跟随特性和干扰抑制特性解耦,并提高了系统的鲁棒性。本文提出方法能使系统获得良好的设定值跟随性能、干扰抑制性能和鲁棒性,而且控制算法简单,易于工程实践。
[1]SEBORG D E,MELLICHAMP D A,EDGAR T F,et al.Process dynamics and control[M].USA:John Wiley&Sons,2010.
[2]SCALI C,RACHID A.Analytical design of proportional-integral-derivative controllers for inverse response processes[J].Industrial&engineering chemistry research,1998,37(4):1372-1379.
[3]LUYBEN W L.Tuning proportional-integral controllers for processes with both inverse response and deadtime[J].Industrial&engineering chemistry research,2000,39(4):973-976.
[4]CHIEN I L,CHUNG Y C,CHEN B S,et al.Simple PID controller tuning method for processes with inverse response plus dead time or large overshoot response plus dead time[J].Industrial&engineering chemistry research,2003,42(20):4461-4477.
[5]CHEN P,ZHANG W,ZHU L.Design and tuning method of PID controller for a class of inverse response processes[C]∥American Control Conference,USA:2006.
[6]IINOYA K,ALTPETER R J.Inverse response in process control[J].Industrial&Engineering Chemistry,1962,54(7):39-43.
[7]ZHANG W,XU X,SUN Y.Quantitative performance design for inverse-response processes[J].Industrial&Engineering Chemistry Research,2000,39(6):2056-2061.
[8]ALCANTARA S,PEDRETT C,VILANOVA R,et al.Analytical H∞design for a Smith-type inverse-response compensator[C]∥American Control Conference,2009.ACC'09.USA:2009:1604-1609.
[9]李宁,张井岗.一阶不稳定时滞过程的二自由度PID控制[J].太原科技大学学报,2013,34(2):91-95.
[10]MORARIA M,ZAFIRIOU E.Robust process control[M].Prentice Hall,Englewood Cliffs,NJ,1989.
[11]JENG J C,LIN S W.Robust Proportional-Integral-Derivative Controller Design for Stable/Integrating Processes with Inverse Response and Time Delay[J].Industrial&Engineering Chemistry Research,2012,51(6):2652-2665.
Two-Degree-of-Freedom Control for Inverse Response Plus Time Delay
XU Guang-zhi,ZHANG Jing-gang
(School of Electronic Information Engineering,Taiyuan University of Science and Technology,Taiyuan 030024,China)
For inverse response plus time delay system,a revised method by using inverse internal model controller design was proposed based on a modified structure of the two-degree-of-freedom(2-DOF)control.This method decoupled the set-point tracking response from disturbance rejection response with the Smith predictor.Set-point tracking controller combines the advantages of Smith predictor controller and the internal model controller.Disturbancerejection controller improves the system anti-interference ability and robustness,which overcomes the shortage of traditional Smith predictor.Theoretical analysis and simulation results show that suhc proposed method gives good set-point tracking response,disturbance rejection response and robustness.
inverse response,two-degree-of-freedom control,Smith predictor control
TP273
A
10.3969/j.issn.1673-2057.2015.03.011
1673-2057(2015)03-0213-05
2014-09-15
山西省自然科学基金项目(2011011011-2);山西省回国留学人员科研资助项目(2013-092)
徐广治(1987-),男,硕士研究生,主要研究方向为先进控制理论与应用。
猜你喜欢
湖北农机化(2021年7期)2021-12-07
烟台大学学报(自然科学与工程版)(2021年1期)2021-03-19
成都信息工程大学学报(2021年6期)2021-02-12
自动化学报(2019年6期)2019-07-23
北方工业大学学报(2019年5期)2019-03-30
电机与控制学报(2018年9期)2018-05-14
住宅科技(2015年11期)2015-12-08
自动化仪表(2015年5期)2015-06-15
汽车维修与保养(2015年6期)2015-04-17
质量技术监督研究(2015年1期)2015-04-09