
空间站通用停靠机构设计及动力学分析*
2015-06-09 12:36陈金宝杨铭波
振动、测试与诊断 2015年3期
陈金宝, 成 玫, 聂 宏, 杨铭波
(1.南京航空航天大学航天学院 南京,210016) (2.上海卫星工程研究所 上海,201100)
(3.南京航空航天大学航空宇航学院 南京,210016)
空间站通用停靠机构设计及动力学分析*
陈金宝1, 成 玫2, 聂 宏3, 杨铭波2
(1.南京航空航天大学航天学院 南京,210016) (2.上海卫星工程研究所 上海,201100)
(3.南京航空航天大学航空宇航学院 南京,210016)
结合我国现有异体同构周边式对接机构的研究基础,对大通过范围通用停靠机构开展研究。首先,从空间站的基本任务需求出发,对国内外现有常用对接/停靠机构功能及适用范围进行了详细对比总结;其次,对雄/雌式停靠机构进行了详细设计,重点对导向组件、捕获锁组件等机构进行设计及原理分析;然后,建立了停靠机构接触过程数学模型,重点对停靠机构接触过程作用点的确定开展了研究,同时对停靠机构进行了多工况虚拟样机仿真分析;最后,对该停靠机构进行了模态分析,分析了停靠机构的固有频率和振型。通过上述分析验证了所设计机构模型的准确性,寻找了机构设计的薄弱点,并给出了解决方案,所研究成果为我国发展空间站停靠机构提供技术参考。
停靠机构; 接触; 动力学; 模态分析
1 问题的引出
空间对接技术的研究始于20世纪60年代初期。1963年3月,美国“双子星座”载人飞船的“阿金娜”火箭在宇航员的参与下实现了人类历史上首次空间对接作业。1967年10月,苏联发射的“宇宙-186”和“宇宙-188”两个无人航天器实现了空间自动交会对接。迄今为止,人类已经完成了近300次交会对接/停靠任务[1-2]。目前,世界范围内应用最为广泛的对接/停靠机构包括俄式杆-锥对接机构(russian probe & drogue mechanism)[3]、异体同构周边式对接机构(androgynous peripheral attachment system,简称APAS)、通用停靠机构(common berthing mechanism,简称CBM)[4]以及弱撞击对接机构[5]。目前,国际上对弱撞击对接机构的研究仍处于起步阶段[6],但对其他3种机构的研究均已应用于空间站建设当中,上述3种主要类型对接机构性能对比如表1所示。我国经过十余年的研究,针对异体同构周边式对接机构(APAS)及杆-锥对接机构均已研制成功,并突破了相关关键技术,但针对空间站停靠机构的研究尚未开展。
我国未来将建设长期有人照料的空间站,参考国际空间站的建设经验,小型空间站建设可利用我国现已掌握的APAS对接机构技术。由于APAS系统可通过范围较小[7-8],严重限制了大型实验设备等有效载荷的转运,因此对具有大通过范围的空间对接/停靠机构提出了需求。考虑到我国空间站将装备有遥控机械臂系统及未来可重复运载的发展趋势,结合国际空间站相关设计经验,除了现有对接机构之外,停靠机构也成为一个可行的发展方向。此外,基于空间站建设需要,仅有一套APAS对接机构技术是远远不够的,建立多套对接机构乃至停靠机构十分必要。尽管NASA正在研制的下一代先进对接/停靠机构可实现双重功能,但其较小的通过范围仍无法通过大型货物,同时考虑研发成本等因素,我国未来研制大通过范围的停靠机构是必要及可行的。

表1 国际3种广泛应用的对接/停靠机构性能对比
2 通用停靠机构介绍及设计
2.1 通用停靠机构介绍
通用停靠机构(common berthing mechanism, 简称CBM)是利用轨道飞行器遥控机械臂系统(shuttle remote manipulator system,简称SRMS)或空间站遥控机械臂系统(space station remote manipulator system,简称SSRMS)将国际空间站(international space station,简称ISS)的各个密封单元实现结构连接的通用装置,如图1所示。机构的主动部分和被动部分之间可保持气压密封,宇航员和物资可自由通过,同时提供连接单元之间结构的刚性连接[9]。

图1 典型通用停靠机构操作示意图Fig.1 The schematic of typical CBM
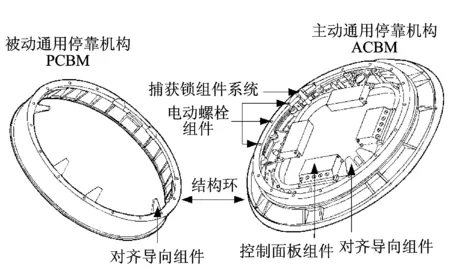
图2 国际通用停靠机构Fig.2 The international CBM
笔者结合国际最新研究成果对雄/雌式停靠机构进行设计,该机构主要由带有执行机构的主动停靠机构(ACBM)和被动停靠机构(PCBM)组成,见图2。主动停靠机构是停靠机构的核心部件,所有耗能组件均安装在主动停靠机构上,该机构主要由结构环、对齐导向组件、捕获锁组件、电动螺栓组件、控制面板组件、密封组件及压力检测组件等构成。
2.2 通用停靠机构设计
异体同构周边式对接机构是目前国际常用对接机构类型,我国“神舟”系列飞船与天宫一号对接就是使用该类型对接机构。雄/雌式停靠机构与异体同构对接机构类似,该停靠机构主动部分和被动部分可延续异体同构对接机构的相关关键技术,视具体任务要求可执行主动部分或被动部分功能,因此,任意停靠机构可与任意其他停靠机构实现配对停靠操作[10-11]。笔者设计的雄/雌式停靠机构见图3。

图3 笔者设计的停靠机构Fig.3 The design of docking mechanism
该停靠机构对齐导向组件模型如图4所示,这种导向瓣是呈环形安装在停靠机构结构环上的,共有90°间隔安装4组。在每组导向瓣中,被动停靠机构上的2个导向瓣的夹角为30°,主动停靠机构的2个导向瓣的夹角为15°,因而主动停靠机构的导向瓣被被动停靠机构的导向瓣限制在一定范围内,在两部分靠近过程中通过接触实现导向操作[12]。

图4 对齐导向组件Fig.4 The alignment guide assembly
捕获锁组件是通用停靠机构重要组件之一,图5为带驱动器的捕获锁机构,从中可以清楚地看到该系列捕获锁组件由常用四连杆机构所构成。适配器由与捕获臂配合的抓钩和导向板共两部分组成。通过螺栓安装在PCBM结构环内侧的双排螺孔上,每个适配器为一段16°的圆弧。单个捕获机构捕获范围示意如图6所示。

图5 带驱动器的捕获锁机构Fig.5 The capture mechanism with drive system

图6 单个捕获锁捕获机构的运动示意图Fig.6 The diagram of single capture mechanism motion
3 通用停靠机构接触过程分析
停靠机构停靠操作过程中必然存在航天器相互作用的动力学问题。在研制停靠机构系统时,相互碰撞作用力的大小、停靠双方相对位移等都是重要的动力学参数。本部分对整个停靠过程进行理论分析,建立停靠过程数学模型。需要说明的是,与一般对接机构利用导向瓣产生机械接触,然后通过导向瓣的配对作用慢慢实现捕获的过程不同,通用停靠机构依靠4个捕获锁机构首先与捕获锁适配器产生机械接触,然后与对齐导向组件配合实现捕获和拉紧。
3.1 坐标系定义
笔者对停靠机构接触过程进行运动学分析,建立如图7所示的坐标系系统。相关定义说明如下:
1) 固结于带有主动停靠机构(ACBM)的航天器1上的坐标系,称为坐标系O1x1y1z1,坐标原点为航天器(不包括ACBM)的质心位置;
2) 固结于带有被动停靠机构(PCBM)的航天器2上的坐标系,称为坐标系O2x2y2z2,坐标原点为航天器(包含PCBM)的质心位置;
3) 固结于主动停靠机构(ACBM)的坐标系,称为坐标系O3x3y3z3,坐标原点为ACBM质心位置;
4) 惯性坐标系,主要用于推导系统模型时作为临时的或过渡的坐标系,坐标原点可任意方便地选取。

图7 停靠机构停靠过程坐标系系统Fig.7 The coordinate system of CBM
取xiyizi作为中心惯量主轴。x1,2轴的方向规定为:通过停靠机构系统对称纵轴,完成停靠操作后,两轴重合,并由O1指向O2。为了减少未知数的数量,一般把航天器2质心的运动看作是在坐标系1中的相对运动,而相对于质心的姿态运动,则需要对每个物体进行独立描述,这样可以计算控制系统产生的力矩。
任意矢量由坐标系1向坐标系2转换可采用以下方式进行:a.绕y1轴转过一偏航角ψ;b.绕中间轴z1,2转过一俯仰角θ;c.绕x2轴转过一滚转角φ。相应转置矩阵A21如下
(1)

(2)
其中
(3)
同理,任意矢量从坐标系3向坐标系1转换时可借助相应的转换矩阵A31来实现,该矩阵只需将A21中的φ,ψ,θ用φ3,ψ3,θ3代替即可得到。
3.2 停靠机构停靠过程接触点分析
对于异体同构周边式这类带有导向瓣的对接结构,寻找其大量可能存在的相互作用点的问题是该类系统最为复杂的问题。停靠机构接触过程也属于这类问题,因此本研究的运动学模型首先应重点对相互接触作用点的确定开展研究[13]。如图8所示,该停靠机构中系统共存在3类26种独立的可能接触模式,说明如下:
1) 导向瓣之间的相互接触(V=1,2,…,8);
2) 导向瓣与停靠对方法兰面之间的接触(V=9,10,…,24);
3) 停靠法兰面之间的接触(V=25,26)。

图8 停靠机构可能的接触模式Fig.8 The possible contact mode of CBM
结合图7所示的坐标系系统及图8所示的接触模式示意图,停靠机构导向瓣边缘上任意点可用以下矢量和来表示
(主动停靠机构上的接触点)
(被动停靠机构上的接触点)
其中:矢量gi(u),qj(v)的取值与参数u,v有关,这里有0≤u,v≤1。
笔者以V=1~24的接触点搜索为例,为了寻找接触点,引入取决于参数w的辅助矢量p(w),并选取ACBM停靠法兰边缘任意点g7和PCBM停靠法兰边缘任意点q7,利用空间封闭多变形可得所有接触模式下的矢量方程
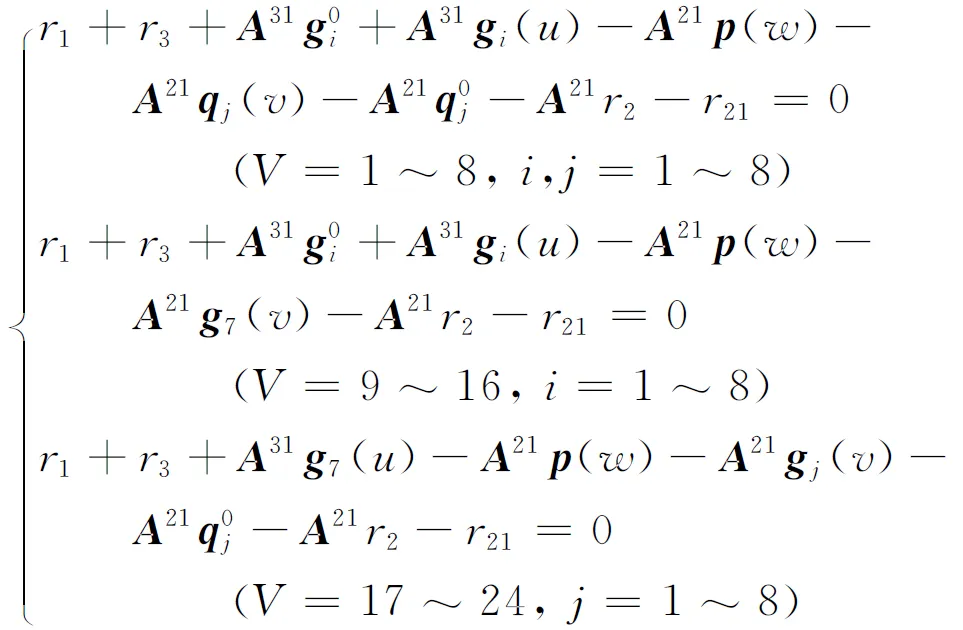
(4)
当矢量p=0时,式(4)中相应的矢量方程转化为联系方程,而参数u,v便可相应地确定了相互接触作用点的坐标位置。
4 停靠机构接触过程动力学分析
结合上述研究内容,笔者以雄/雌式停靠机构为研究对象,建立了该停靠机构模型,考虑到机构具有一定的捕获包络,笔者分析的工况给出了一定初始偏差,用以初步考核该停靠机构的捕获能力。如图9所示,本研究的模型设置初始偏差为:轴向偏差为120 mm;滚转偏差约为5°。
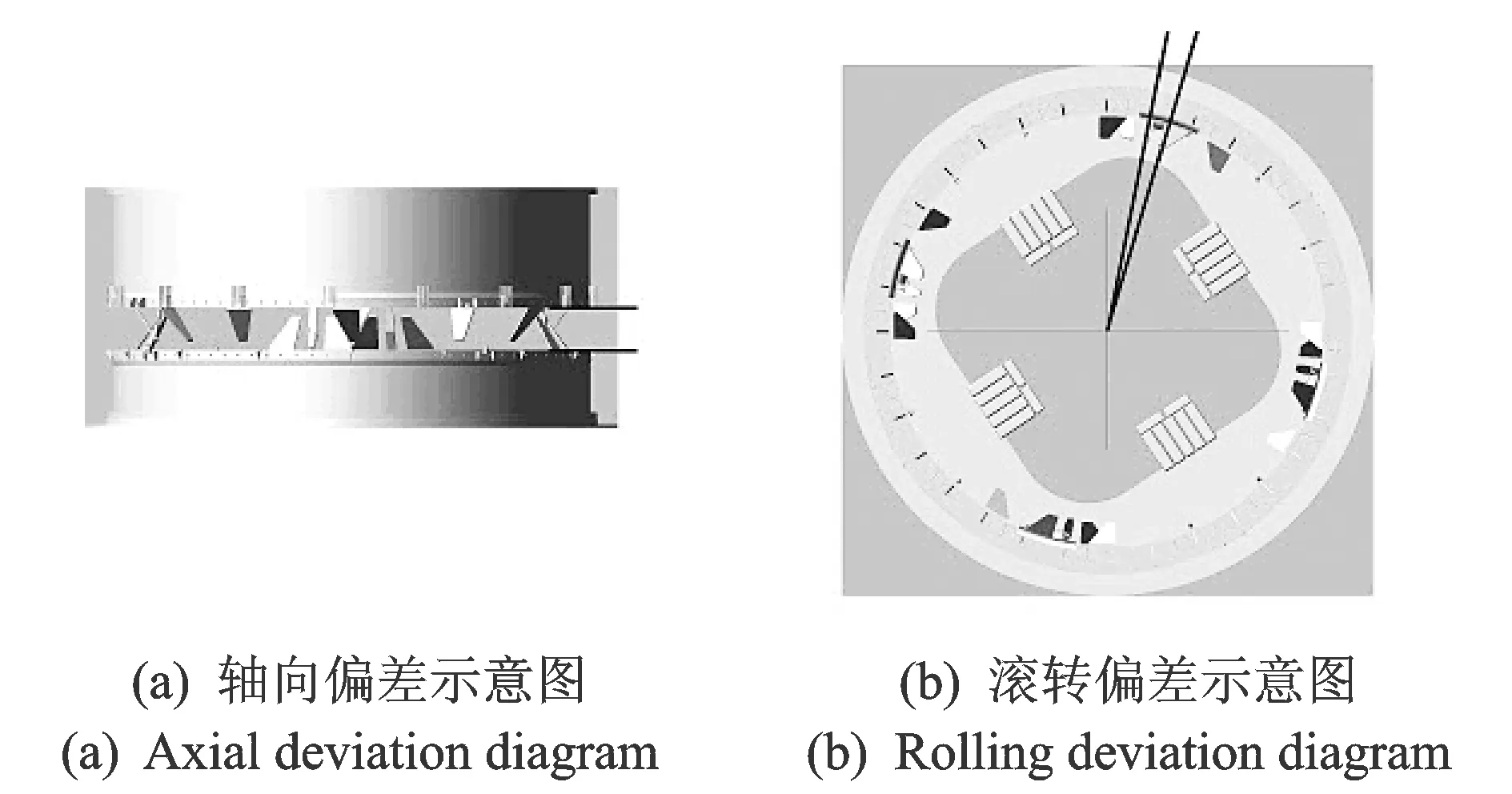
图9 停靠机构分析工况的偏差示意图Fig.9 The deviation of CBM
实现捕获任务是停靠机构能完成停靠任务的第一要素。笔者对停靠机构虚拟样机仿真中,对捕获过程进行全过程动力学分析。如图10所示,在初始状态a时,PCBM进入可捕获范围,触发相应信号,接收到捕获指令后,4个捕获机构的电机开始工作;b状态表示捕获臂与适配器发生初始接触;c~f状态表示捕获电机持续工作,捕获臂抓钩与适配器抓钩实现良好配合,反向驱动机械臂将PCBM拉近ACBM,靠近过程中,导向组件起到良好作用,停靠法兰最终良好配对。

图10 停靠机构捕获过程运动图Fig.10 The diagram of CBM capture motion

图11 PCBM质心位置时域曲线Fig.11 The displacement curve of centroid in PCBM

图12 PCBM滚转角速度时域曲线Fig.12 The roll angular velocity curve of PCBM
在该工况下,PCBM的运动特性如图11,12所示。可以看到,随着停靠双方法兰间距的减小,PCBM的速度也越来越小,有利于减少碰撞能量。
当停靠机构完成停靠任务以后,首先由电动螺栓驱动电机反向转动,解除螺栓连接,然后捕获机构电机反向转动。通用停靠机构的释放过程见图13。
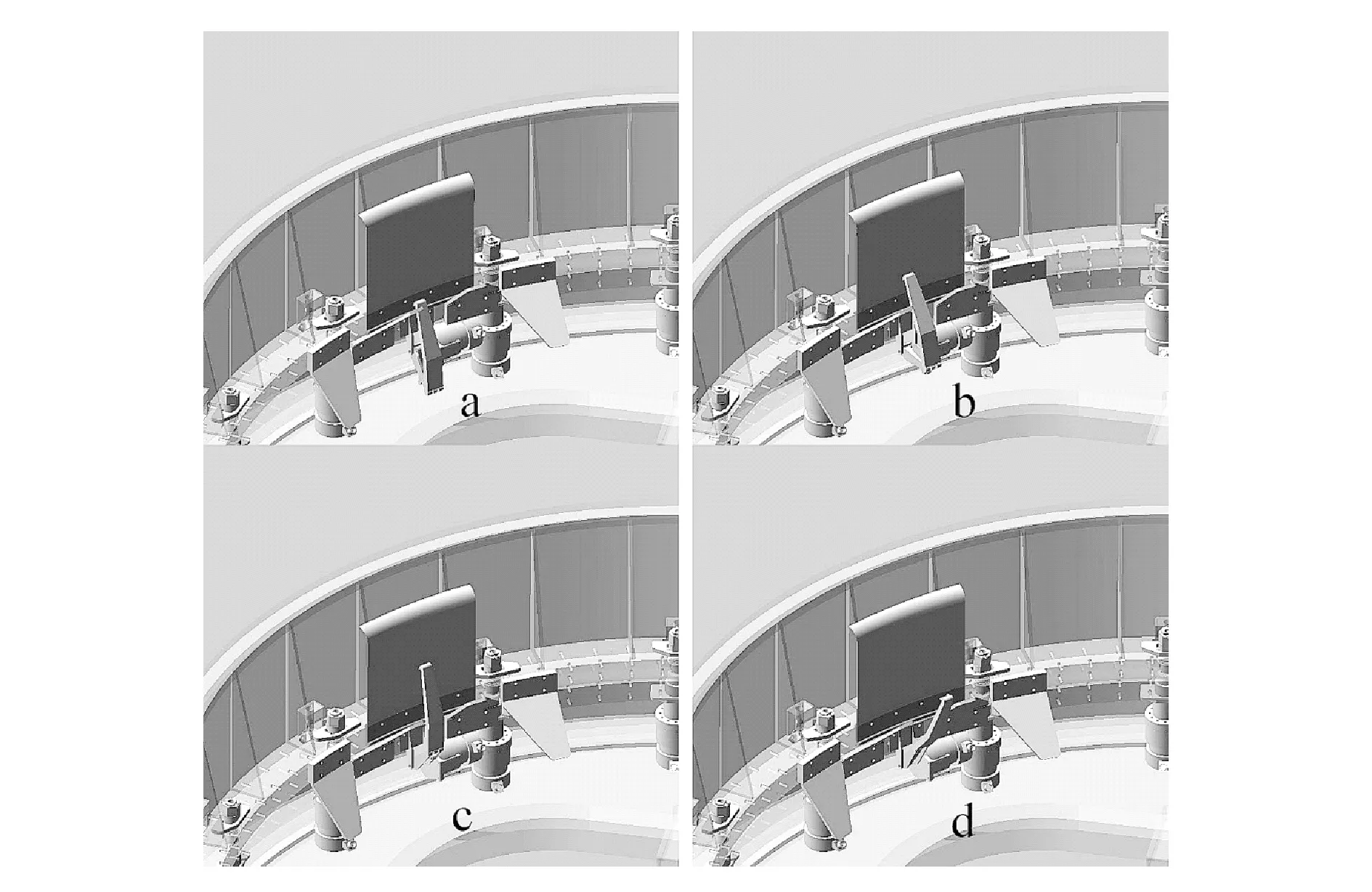
图13 停靠机构释放过程运动图Fig.13 The release motion of CBM
5 停靠机构模态分析
在空间站停靠机构实际操作中,装有ACBM的航天器一般已预先安装入轨,后期大量的发射任务中,一般为安装有PCBM的装配单元的航天器陆续
发射升空。因此,笔者着重对PCBM固有频率和振型进行分析。结合上述模型,在MSC.Patran中对PCBM有限元模型施加边界条件,并在MSC.Nastran中进行模态分析,表2给出了PCBM前13阶固有频率。

表2 PCBM固有频率分析
相关主要振型如图14~16所示,结合上述模态振型及表2所总结的PCBM的前13阶模态固有频率和振型描述,分析如下。

图14 适配器导向瓣扭转(mode 3)Fig.14 The torsion of PCBM(mode 3)

图15 相邻非配对导向瓣180°相位差弯曲(mode 9)Fig.15 The 180°bending pf the adjacent non paired guide pedal (model 9)

图16 导向瓣同步弯曲(mode 13)Fig.16 The synchronous bending of the guide pedal (model 13)
1) PCBM的前13阶模态的固有频率集中在20~110 Hz的范围内。
2) 1~4阶模态的固有频率基本相同,这是由结构的基本对称性引起的。由于网格划分带来一定的不对称性,从而这些固有频率不是完全相同;4~8阶模态基于相同的原因,固有频率也基本相同。综合看来,前8阶模态均为适配器导向板刚度不足引起的振动。若20 Hz的基频不能满足火箭发射要求,需进行相应的设计修改,提高适配器导向板刚度,从而提升结构的基频。
3) 9~13阶模态为导向瓣刚度问题引起的振动,由于其振动频率较高,该处对系统整体影响不大。
4) 第8阶模态与第10阶模态相差约62 Hz, 为实际工程可用的激振频率区间,为防止停靠机构产生共振,系统周边的可调激振频率应尽量控制在这一区段。随着设计的修改,适配器导向板刚度得到相应提高后这一区间可能缩小,但仍为可用区段。
6 结 论
1) 停靠机构是未来大型空间站建设的发展趋势,笔者对现有的主要类型对接/停靠机构进行对比总结,对雄/雌式停靠机构进行了详细设计与分析。
2) 雄/雌式停靠机构采用导向瓣为对齐导向组件,寻找大量可能存在的相互作用点问题是该类系统的关键问题,笔者通过建立停靠机构接触过程数学模型,重点对停靠机构接触过程作用点的确定开展研究。
3) 笔者建立了雄/雌式停靠机构模型,并对其停靠过程及分离过程进行了动力学分析,验证了机构设计的合理性。
4) 笔者对所设计的雄/雌式停靠机构进行了模态分析,研究了机构设计的薄弱环节,并提出了改进方案。
[1] Lydon B. Interface definition document for international space station visiting vehicles (NASA-SSP50235)[R]. Houston: Johnson Space Center, 2000:5-21.
[2] 陈宝东,郑云青,邵济民,等.对接机构分系统研制[J].上海航天,2011,28(6):1-6.
Chen Baodong, Zheng Yunqing, Shao Jimin, et al. Development of docking subsystem[J]. Aerospace Shanghai, 2011,28(6):1-6. (in Chinese)
[3] John C, Valley A, Thomas H. ISS interface mechanisms and their heritage[R]. Houston: Space Center Boulevard, 2011:7-39.
[4] George P. Overview of the NASA docking system and the international docking system standard[C]∥AIAA Annual Technical Symposium, 2011.Houston, US: NASA/JSC,2011:5-10.
[5] James L L. Advanced docking berthing system[R]. Houston: Johnson Space Center, 2010:1-2.
[6] James L L. Androgynous, reconfigurable closed loop feedback controlled low impact docking system with load sensing electromagnetic capture ring: US, 6354540[P]. 2002-03-12.
[7] Brandan R. Advanced docking/berthing system[R]. Houston: Johnson Space Center, 2004:1-8.
[8] Walter C, Maria C F, Robert C. Space station program: node 3 to habitation module interface control document[R]. Houston: Johnson Space Center, 1999:17-50.
[9] Richard J M, William H W. The common berthing mechanism for international space station[C]∥31st International Conference on Environmental Systems, 2001. Orlando, US: [s.n.], 2001:1-8.
[10]Erik I. Space station freedom common berthing mechanism[C]∥Proceedings of the 26th Aerospace Mechanisms Symposium, 1992. Sunnyvale, US: [s.n.], 1992:281-296.
[11]Valin T. Commercial crew& cargo program overview[C]∥45th AIAA Aerospace Sciences Meeting, 2007. Reno, US: [s.n.], 2007:5-16.
[12]David E A, Debra A M, Kashyap S. International space station EVA operations-phase 2 hardware lessons learned[C]∥31st International Conference on Environmental Systems, 2001. Orlando, US: [s.n.], 2001:7-13.
[13]娄汉文,曲广吉,刘济生.空间对接机构[M].北京:航空工业出版社,1992:164-170.

10.16450/j.cnki.issn.1004-6801.2015.03.002
*上海航天SAST基金(2013年)重点资助项目;上海市深空探测技术重点实验室开放课题资助项目(13d22260100);南京航空航天大学基本科研业务费资助项目(NS2015085)
2013-07-10;
2013-12-06
TP242; TH113
陈金宝,男,1980年6月生,副教授。主要研究方向为航天器结构动力学与控制、飞行器起落装置设计等。曾发表《Overloading of landing based on the deformation of the lunar lander》(《Chinese Journal of Aeronautics》2008,Vol.21,No.1)等论文。 E-mail: chenjbao@nuaa.edu.cn
猜你喜欢
军事文摘(2022年18期)2022-10-14
军事文摘(2022年12期)2022-07-13
小天使·三年级语数英综合(2022年4期)2022-04-28
导航定位学报(2022年2期)2022-04-11
军事文摘(2021年18期)2021-12-02
中学生数理化·七年级数学人教版(2018年4期)2018-06-28
数学大世界(2018年1期)2018-04-12
科学与财富(2017年24期)2017-09-06
舰船科学技术(2017年5期)2017-06-19
电脑爱好者(2016年22期)2016-12-16
