康复机器人柔性关节舒适性分析与研究*
2015-06-11 00:45张小栋
机械研究与应用 2015年4期
刘 莹,张小栋
(1.宁夏民族职业技术学院,宁夏吴忠 751100;2.西安交通大学机械工程学院,陕西西安 710049)
0 引言
康复机器人是一种人机一体化系统,它与使用者通过束带连接,不仅要为使用者提供助力和相同的步态功能,而且在确保使用者的人身安全前提下,其穿戴舒适性是首要考虑的问题,为设计出穿着舒适的外骨骼,实现人与外骨骼紧密地物理吻合,使操作者肢体能进行协调运动,必须依照一个重要的条件-拟人化。在对外骨骼柔性关节进行设计时,需要对柔性关节机械结构、人与外骨骼压力接触承受点、外骨骼柔性关节活动范围及关节驱动系统进行分析与研究,形成了一套完善的仿生设计原则,设计的外骨骼要结构轻巧、穿戴方便、操作柔顺,保证穿戴者的舒适性和安全性。
1 外骨骼柔性关节机构设计原理与要求
机械结构设计是康复机器人柔性关节舒适性研究最重要的一步,机械结构设计的好坏将直接关系到整个康复机器人系统的整体性能,采用仿生学和拟人化的设计方法,要求各项参数都要参照正常人体下肢来设定。首先在材质方面,机构所选择的材质要无毒、无害、散热性好,防腐蚀,抗辐射,绝缘,同时材质的刚度不仅要能承担自身设计的重量,还要能支撑穿戴者的体重,而且在外界突发的冲击下,不会塑变和断裂,目前我国普遍采用的是铝合金材质;其次在重量方面,外骨骼的总质量应该从选材和设计上尽量轻巧,以节省穿戴者的体力,减少能量消耗;在结构方面,外骨骼的结构设计要避免复杂模型,尽量简单方便,易于建模与控制。
康复机器人柔性关节系统是用来辅助患者做康复训练的,设计的外骨骼结构必须要与人体协调共处,二者不能发生冲突;康复装置带动人体患肢按照预先设定好的步态轨迹进行康复训练,不仅效率要高,还要康复训练时间短;机构设计不仅要考虑强度、精度、刚度,还要求肢体几何尺寸能够调节,以适应不同的穿戴者;同时在保证康复训练高效率前提下,还要增加人机接触缓冲装置,提高机构的安全和舒适性;在满足行走康复的功能基础上,尽量减少运动关节的自由度,以减少使用驱动元件和传感器的数量,满足机构轻巧、便捷、成本低的要求。综上所述,为保证穿戴者的舒适度,康复机器人柔性关节机械结构设计必须满足柔顺简单、待机时间长;轻巧便捷、成本低;穿戴方便、可调节;稳定安全、抗干扰性强[1]的条件,如图1所示。

图1 机器人柔性关节机械结构设计要求图
2 人与外骨骼压力接触承受点分析
当人皮肤的表面承受的压力大于30 mm汞柱时,就会导致皮肤表面毛细血管血液不流通,危及软组织的安全[2],因此外骨骼柔性关节设计必须考虑外骨骼对人的接触压力。压力分布决定操作者的舒适性,压力大小关乎操作者的安全,表皮压力感受并不取决于所施加的压力,而取决于整个施加压力的动态过程,因此不能精确地建立人机接触压力与操作舒适性之间的关系。实验表明,将压力分散在尽可能大的范围以减小表皮承受的压强,较之在具有较高压力承受能力的部位局部施加较大的压力,前者更具舒适性,可以更好地消除压痛,避免伤害。在柔性关节设计时,选择人与外骨骼的压力接触承受点要注意以下几点:
(1)不宜选择腋窝、腹股沟等易损伤部位作为接触压力承受点,易造成人体的疼痛和不必要的损伤。
(2)要避开神经较为密集和表皮毛细血管丰富的区域,以免造成伤害。
(3)人体活动关节周围不要作为接触压力承受点,以便于关节全范围的舒展运动,提高穿戴者的舒适感。
(4)骨头较多的部位也不要作为接触压力承受点,因为这些区域中骨头对表皮的挤压易产生疼痛感,造成患者的不舒适。
为保证舒适度,可在外骨骼与人体直接接触的部位加装结实、柔软的棉垫,保护穿戴者自身肢体不受伤害;在外骨骼与地面接触的部位加装刚强度的橡胶材料,缓解穿戴者行走时地面反冲击力带来的不舒适;在外骨骼机构之外增设拐杖机构,当患者在康复行走过程中,发生意外倾斜,机构瞬时质心位移发生偏转[3],可利用拐杖增加其稳定性。
3 柔性关节舒适性活动范围分析
正常人体下肢由骨骼、关节、骨骼肌组成,如图2所示,它起着支撑人体体重、支持人体走、跑、跳、转各种活动的作用。人体下肢结构由盆骨、大腿骨、小腿骨、足骨以及肌肉组成,以髋关节、膝关节以及踝关节进行连接 ,在活动中,髋关节可屈伸、旋转、外展与内收;而膝关节只可屈伸,无其他自由度;踝关节也可屈伸、旋转、外展与内收[4],如图 3 所示。

图2 人体下肢生理结构图
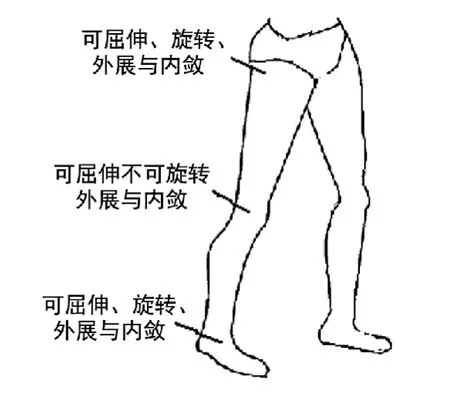
图3 人体下肢关节活动机理图
表1为外骨骼柔性关节活动范围设计,出于安全和舒适的考虑,外骨骼柔性关节的活动范围应大于人在行走时的活动范围而小于人的最大活动范围[5],为防止外骨骼系统出错,关节运动超出设计范围,对人造成伤害,必须在关节处设计机械限位机构,当关节旋转角度超过设定值时,预装的限位块将阻挡关节继续旋转,有效地保障了穿戴者的安全。

表1 外骨骼柔性关节活动范围表
4 外骨骼柔性关节驱动系统对比分析
外骨骼柔性关节驱动系统是实现柔性关节舒适性、柔顺性的重要环节,设计时尽量模拟真实的人体运动关节。人在行走过程中,下肢肌肉的驱动方式是通过关节两侧的骨骼肌在自身轴线方向上的收缩达到的,如图4所示。
机器人驱动系统主要包括:电机驱动、液压驱动、气缸驱动、气动人工肌肉驱动[6]及简易控制的凸轮驱动。电机驱动控制响应快,驱动效率高,控制精度易于保证,维护使用方便,成本低廉,但要实现较大动力的驱动,选取电机的体积会较大,与机构的灵活轻巧性要求产生矛盾;液压驱动具有稳定和承受转矩大的特点,而且人脚摆动落地时与地面之间会产生冲击力,液压驱动会消除这种振动对人体产生的不良影响,这正好符合下肢外骨骼承柔性关节驱动的特点,但液压驱动有它的缺点,这种驱动方式需要油缸及液压管路,这就给外骨骼增加了质量,同时限制了外骨骼行走时的抬腿高度及下蹲的幅度值;气缸驱动使用安全,容易达到高速,工作压力低,介质无污染,制造要求比液压元件低,但是空气可压缩的特点导致其运动速度稳定性差,位置控制不精准;气动人工肌肉驱动具有柔顺、功率/质量比大、在力/长度特性上与人类肌肉类似等优点,但是人工肌肉具有高度非线性,伴有迟滞现象,使得肌肉建模和高精度控制困难;凸轮驱动能够实现特定的步态模式行走运动,极大地简化了外骨骼设计的控制策略,降低了控制难度和成本但凸轮驱动不能根据使用者的步态进行实时调整[7]。

图4 关节驱动示意图
良好的驱动机构能够减小外骨骼的重量,提高输出的稳定性,增加运动的安全性,减小振动给穿戴者带来舒适感。所以在选择、设计驱动机构时,不仅要求有足够的输出功率来对外骨骼进行加速、减速并带动负载,同时在满足功能的基础上既要有较轻的重量,较小的体积,又要有良好的散热性能,以实现可穿戴式的外骨骼柔性关节系统的要求。
5 结语
康复机器人外骨骼柔性关节舒适性研究本着贯彻仿生学拟人化的原则,设计不仅要轻巧、穿戴方便、操作柔顺,满足穿戴者舒适和安全的要求,还要使患者获得正确行走步态训练。从机构设计角度来看,太过于简单的人体运动关节模型无法满足系统设计的要求,而过于复杂的人体运动关节结构模型也将成倍地增加外骨骼结构设计的难度,合理地选择人体运动关节模型,以最简洁的结构形式实现所需的全部功能,是外骨骼柔性关节舒适设计的基本思想,从生理学角度合理选择地人机压力接触承受点、从仿生学角度为外骨骼柔性关节设计活动范围,从拟人化角度科学地选择关节驱动系统,为下一步柔性关节机构设计奠定基础。
[1] 邢学彬.下肢康复柔性关节机器人的研究[D].沈阳:沈阳工业大学,2011.
[2] 张佳帆.基于柔性外骨骼人机智能系统基础理论及应用技术研究[D].杭州:浙江大学,2009.
[3] 王树海,刘西侠,金 毅,等.四足步行机器人稳定性分析[J].机械研究与应用,2112(5):19-21.
[4] 陈占伏,杨秀霞,顾文锦.下肢外骨骼机械结构的分析与设计[J].计算机仿真,2008,25(8):238-241.
[5] 何旅洋,张志强,郑百林.外骨骼框架生物力学设计及强度分析[J].医用生物学,2014,29(6):504-510.
[6] 刘会勇,赵 青.下肢外骨骼助行机器人驱动系统分析[J].机床与液压,2013(41)3:168-171.
[7] 张峻霞,杨喜飞,王新亭,等.凸轮在下肢外骨骼纸动中的应用与分析[J].机械设计与制造,2012(6):68-70.
猜你喜欢
机械工业标准化与质量(2022年9期)2022-09-30
石油沥青(2021年5期)2021-12-02
小哥白尼(野生动物)(2021年12期)2021-03-29
文化创新比较研究(2020年7期)2021-01-13
高师理科学刊(2020年2期)2020-11-26
建筑热能通风空调(2018年5期)2018-07-09
池州学院学报(2017年3期)2017-10-16
消费者报道(2016年3期)2016-02-28
汽车零部件(2014年6期)2014-09-20
华东理工大学学报(自然科学版)(2014年5期)2014-02-27