变惯量飞轮振摆在液压激振中的应用*
2015-06-13 09:38吕云嵩
振动、测试与诊断 2015年6期
吕云嵩,张 杰
(南京工程学院机械工程学院 南京,211167)
变惯量飞轮振摆在液压激振中的应用*
吕云嵩,张 杰
(南京工程学院机械工程学院 南京,211167)
针对现有液压激振装置利用液压阀的阻尼效应来控制振动存在理论能效非常低的问题,提出了一种基于变惯量飞轮振摆的液压激振方法。将振体与作动缸活塞杆连接,液压马达传动轴与变量飞轮连接,作动缸与液压马达结成闭式液压回路。振体振动时带动作动缸输出交变压力油,驱动液压马达和飞轮振摆。由于飞轮的转动惯量能按照振体的运动相位指令变化,故在振摆过程中飞轮和振体之间能形成动量循环,并藉此强化振动。这种动量循环激振没有节流损失,节能效果明显。构建了液压激振系统的数学模型,并对其动力学性能进行了理论分析和Matlab仿真验证。结果表明,变量飞轮激振效果与作动缸工作面积、液压马达排量及飞轮惯量调节系数等结构参数有关,在适当条件下激振效果明显。
变量飞轮; 液压激振; 振摆; 节能
引 言
液压激振具有低频特性好、推力大、容易实现过载保护以及环境适应性强等优点,因而在低频大功率振动台和工程机械等领域得到广泛应用[1]。液压激振的一个主要缺点是工作能效低。长期以来,液压激振回路一直沿用两种主流结构:一种是用配流阀控制作动缸的结构;另一种是用电液伺服阀控制作动缸的结构。前者主要用于工程机械及施工机具,后者多用于液压振动台等实验设备。由于这两种结构都是利用液压阀的阻尼效应控制振动,故其理论能效最高只有37%。目前,学术界对液压激振技术的研究主要集中在如何提高振动控制精度、增加输出功率以及拓展频宽等方面[2-8],而有关节能方面的研究则鲜有报道。飞轮是一种古老的机械蓄能装置,近年来,迫于能源与环境的双重压力,飞轮蓄能技术重新受到重视[9-10]。鉴于此,笔者提出一种飞轮振摆液压激振的方法,其基本构想是将飞轮-液压马达激振回路与机械振动单元动力偶合,利用飞轮转动惯量周期性变化来实施激振。因飞轮惯量变化不产生阻尼损耗,故这种激振方法比传统的液压阀控激振方式更为节能。
1 飞轮振摆液压激振方法
1.1 转盘式变量飞轮工作原理
如图1所示,转盘由盘缘4、辐板3及转盘轴9组成,转盘轴装在盘架7的轴承座上,盘架与飞轮轴1用法兰连接。转盘由图1中伺服气缸6驱动旋转,当盘辐质心位于水平轴时,飞轮轴1的转动惯量最小。当盘辐质心处于铅垂轴时,飞轮轴1的转动惯量最大。伺服气缸的运动受振体位移传感器控制,飞轮轴1的转动惯量按一定规律随振动体运动变化。气缸内置变刚度弹簧用于平衡盘辐离心力绕转盘轴的转矩,因此,气缸只需很小的推力就能驱动转盘[11-12]。
1.2 飞轮振摆液压激振系统构建及机理分析
飞轮振摆液压激振系统如图2所示。振体4与弹性元件2为机械振动单元,作动缸5、液压马达6和飞轮9为液压激振回路,作动缸5连接振体4,两个振动单元实现动力耦合。这个新型液压激振系统的工作机理是:系统启动时液压缸1按预设初始位移推动振体4偏离平衡位置,然后活塞杆退回,于是振体在弹性元件2作用下产生振动。作动缸与振体同步运动输出交变压力油,驱动马达6和飞轮9旋转。飞轮旋转过程中其转动惯量J是变化的。按照动量守恒定律,当飞轮惯量增大时振体的动量会向飞轮转移,振体因此减速;反之,当飞轮惯量减小时飞轮的动量将向振体转移,振体便会加速。振动本质上是能量在载体之间相互转移的结果。对于阀控激振,能量转移的路径是:液压能从动力源传递给振体,再以热能形式向周围物质扩散。能量的利用是一次性的,飞轮激振则不然,它是通过动量在飞轮和振体之间交互转移实现的,因为能量始终在系统内部循环,可重复利用,故而高效。
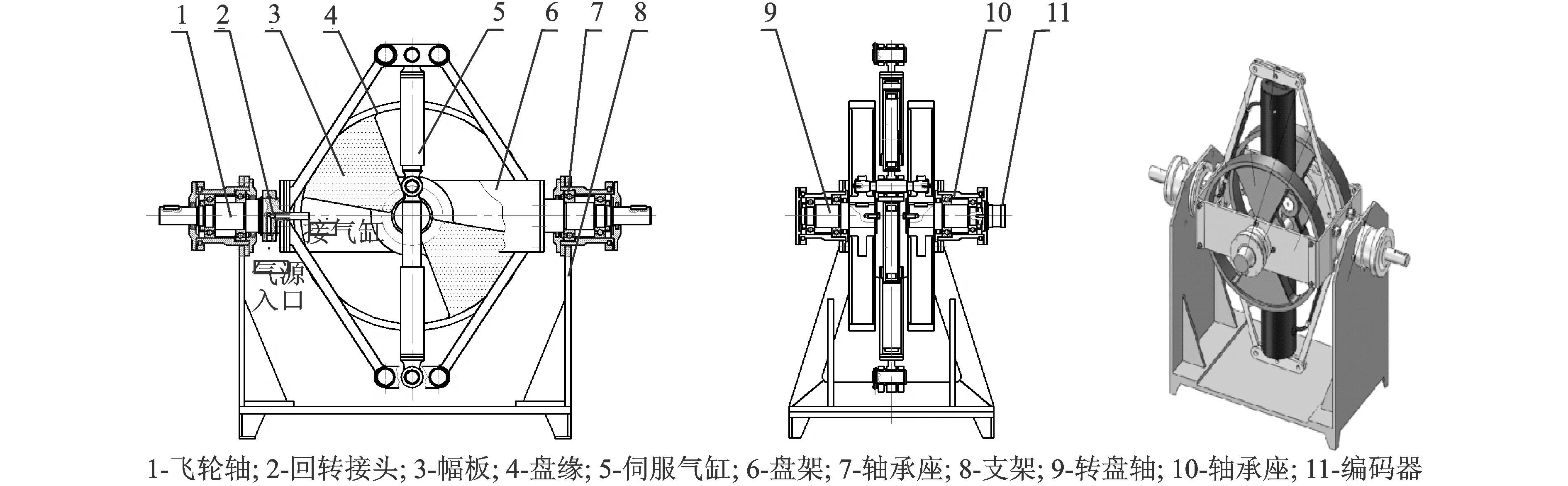
图1 变量飞轮
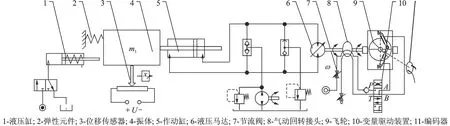
图2 液压激振回路
2 飞轮振摆液压激振回路基本方程
回路连续性方程为
马达-飞轮力平衡方程为
振体力平衡方程为
将上述方程拉氏变换并消去中间变量ω和pL得
(1)
式(1)还可写成
忽略阻尼项,上式可整理成
(2)

3 飞轮振摆液压激振系统理论分析
式(1)和式(2)是4阶微分方程,其动态特性取决于ω1,ω2,ω3这3个固有频率。为了便于分析,现讨论以下两种极端情况。
3.1 ω3/s≫1时的情况
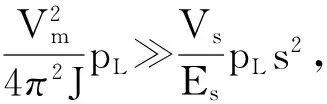
若同时有ω3≫ω2,则式(1)可进一步简化为
(3)
式(3)表明,当ω3足够高时,系统的固有频率近似等于ω1。由ω3定义可知,只要增加马达排量Vm即可提高ω3。马达排量增大,飞轮转动引起的流量变化亦增大,作动缸与马达之间油液的压缩流量则变小,作动缸对振体的作用力减小。这样,振体的复位力便主要来自弹性元件2(见图2),故振动频率近似等于ω1。
3.2 ω3/s≪1时的情况
式(1)可简化为
或
(4)

式(4)表明,当ω3足够小时,作动缸对于振体相当于刚度为kh的液压弹簧,它与刚度为k的弹性元件2并联,系统综合固有频率近似等于ω1+ω2。从ω3的定义可知,减小马达排量Vm会使ω3下降,飞轮响应变慢,作动缸与马达之间油液的压缩流量变大,液体弹簧效应增加,它与弹性元件2并联给振体提供复位力。
由上述分析可知系统动态特性随ω3即Vm的变化规律,即飞轮对振动的影响随Vm增大而增大,液体弹簧的影响随Vm的增大而减小。
4 数字仿真分析
4.1 状态方程
4.2 数字仿真
系统主要结构参数如表1所示,仿真初始条件为[0.01 0 0 0],采用Matlab软件进行仿真。
表1 回路主要结构参数
Tab.1 Major parameters of the circuit
参数数值参数数值振体质量/kg5000主振等效弹簧/(kg·m-1)1.8×105马达排量/cm3150辅振缸面积/cm260飞轮惯量/kgm210惯量调节系数0.05
图3为无飞轮辅振的液压激振主回路自由衰减振动曲线图,上、中、下图分别为振幅、振体运动速度和飞轮转速。自由振动最大振幅等于初始位移0.01 m。图4为无液桥飞轮辅振曲线图。因未经液桥整流,马达-飞轮的运动为往复摆动。在变量过程中,变量驱动装置会将少许能量注入激振系统。按上述仿真条件,注入能量大于系统损耗,故振幅随时间不降反增,仿真时段内达到0.16 m。按表2数据,系统3个固有频率分别为ω1=36rad/s,ω2=48rad/s,ω3=32rad/s,响应曲线频率接近ω1。
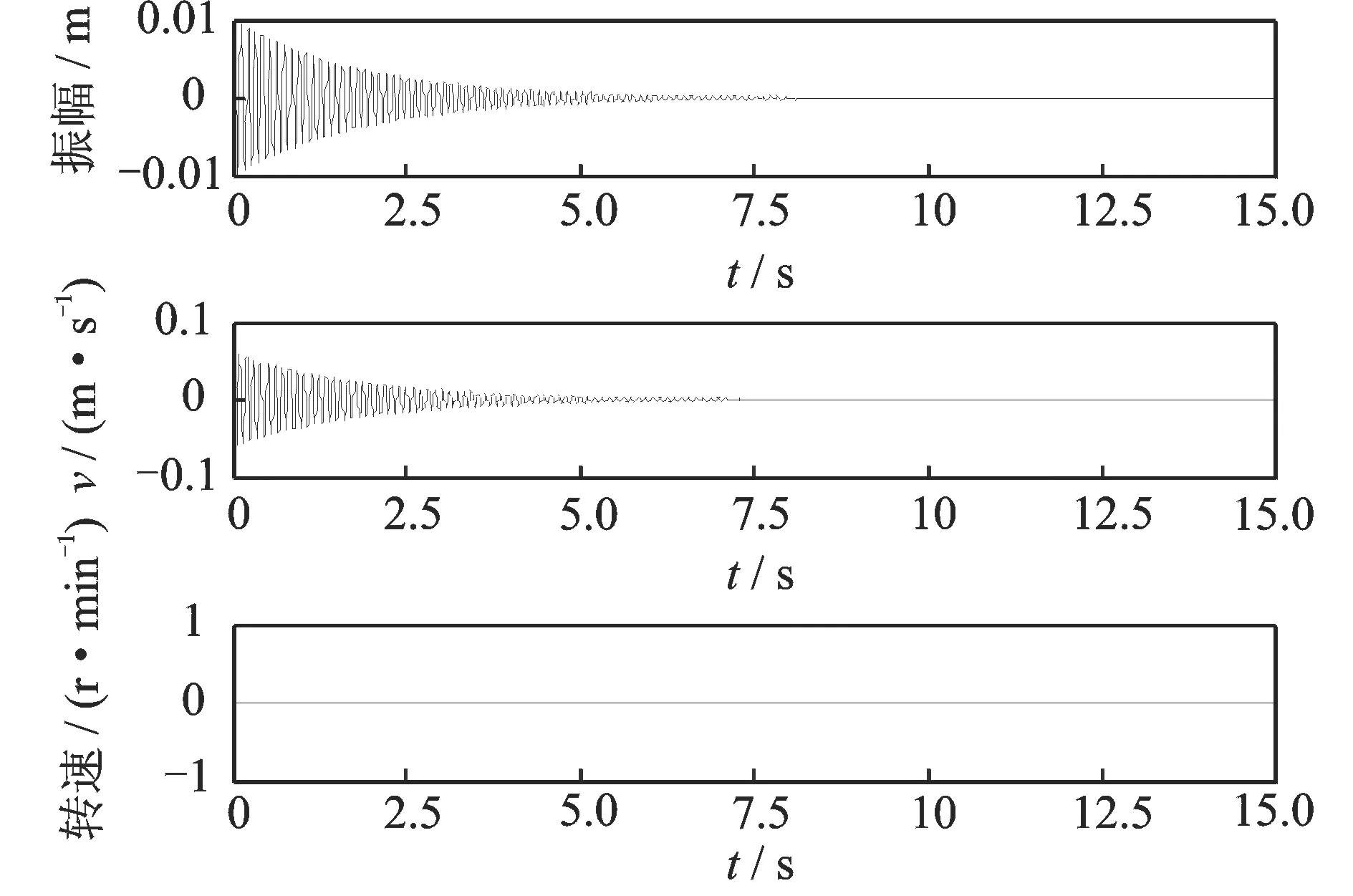
图3 无飞轮自由振动
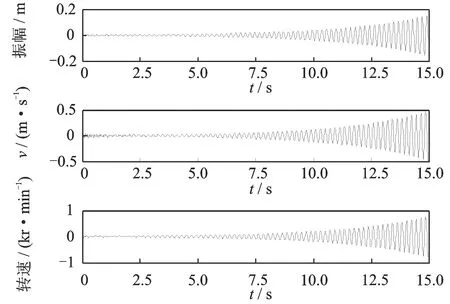
图4 变量飞轮激振
若将表2中的马达排量调整为Vm=3 cm3,则ω3=0.6 rad/s,系统响应曲线如图5~图7所示。图5上图为振幅曲线,下图为速度曲线。图6上图为马达转速曲线,下图为作动缸压差曲线。图7局部放大振动由高频ω1+ω2和低频ω3分量叠加而成,总幅值不超过初始幅值。仿真结果与式(2)基本一致,即振动由低频ω3主导,它是马达-飞轮的固有频率。另外,在系统阻尼作用下,频率为ω1+ω2的高频振动衰减很快。可见,在马达小排量条件下,飞轮振摆对系统振幅没有放大作用。从图5、图6还可以看出,由于马达转速曲线远离0线,造成作动缸两腔压力不对称,缸的动、静态平衡位置也出现偏离。
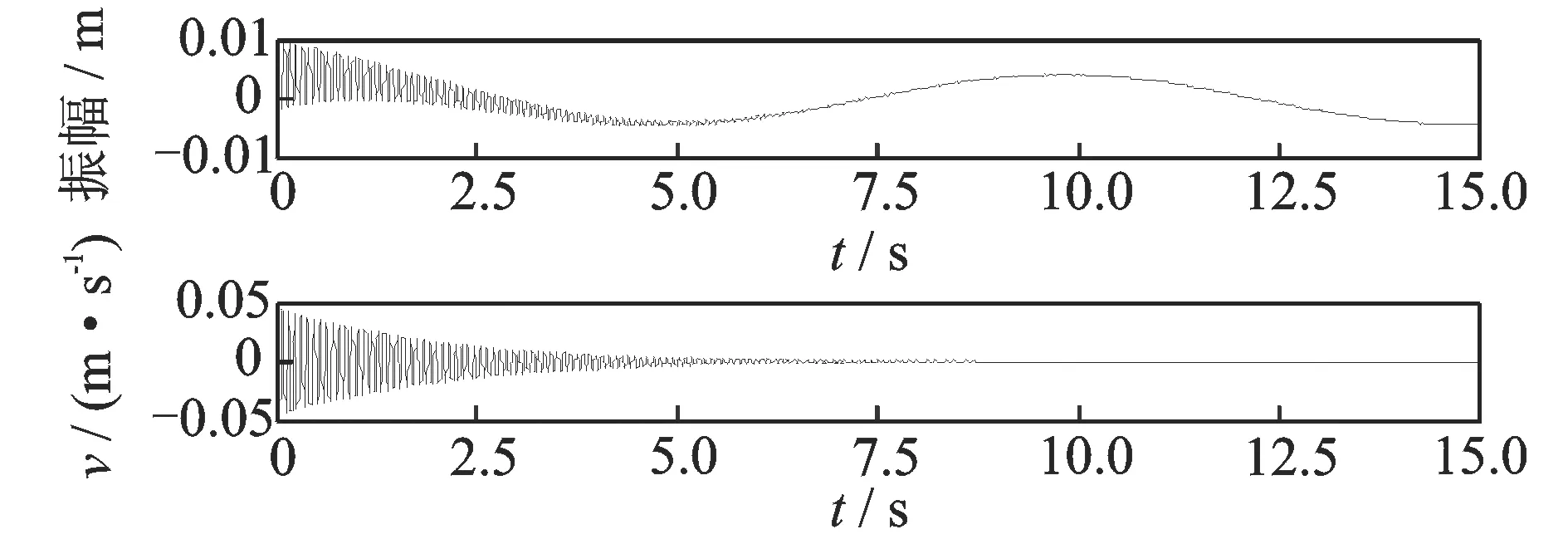
图5 马达小排量时的振幅和速度
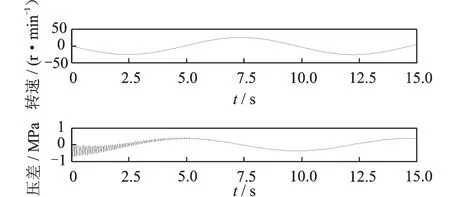
图6 马达小排量时的转速和压差
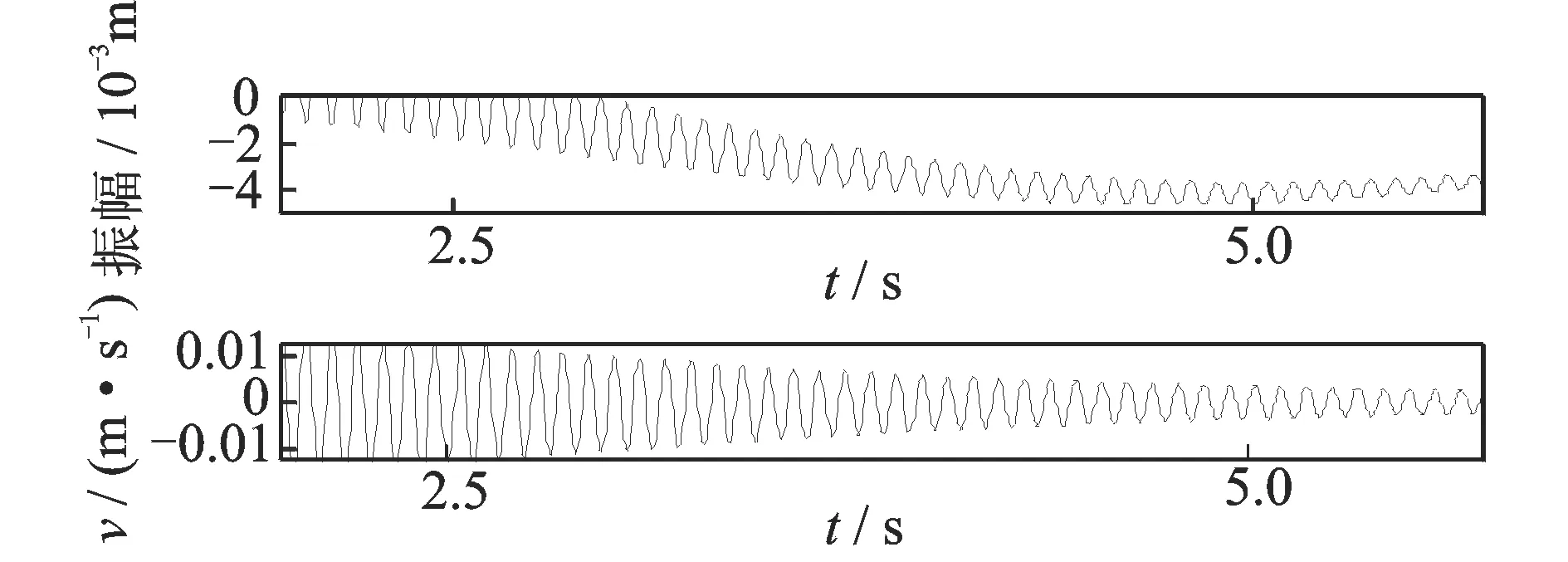
图7 局部放大图
4.3 系统结构参数对激振效果的影响
图2所示回路的振动特性取决于回路结构参数,其中影响最显著的是作动缸有效工作面积Ap、液压马达排量Vm和飞轮惯量调节系数i。图8是在Ap和Vm固定情况下i对振幅的影响;图9是当Ap和i固定的情况下Vm对振幅的影响。两张图的纵坐标都是幅值,横坐标分别是飞轮惯量调节系数和马达排量。因为是仿真结果,不像实际系统存在结构尺度、力学强度以及能源动力等方面的约束,所以图示振幅很大。由图可见,上述参数对振动影响很大,选择不当会严重影响飞轮激振效果,甚至起不到激振作用。
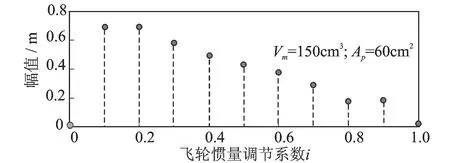
图8 飞轮惯量调节系数的影响
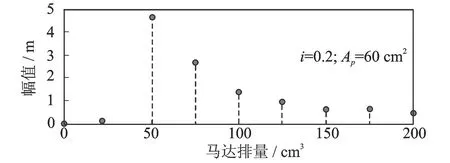
图9 马达排量的影响
5 结 论
1) 飞轮液压激振的特点在于动量在飞轮和振体之间交互转移,能量始终在系统内部循环,被重复利用,节能效果明显;而在阀控液压激振系统中,液压能从动力源传递给振体,再以热能形式向周围物质扩散,能量的利用是一次性的。
2) 飞轮液压激振回路的数学模型是1个4阶微分方程,包括2个串联的2阶振荡环节,其固有频率分别为ω1和ω3,还包括1个系数为ω2的独立2阶项。当ω3≫ω1且ω3≫ω2时,系统固有频率近似为机械振动单元固有频率ω1,飞轮激振作用明显。当ω3≪ω1且ω3≪ω2时,振动由高频ω1+ω2和低频ω3分量叠加而成,其中高频衰减很快,振动由低频ω3主导。ω3是马达-飞轮的固有频率。此时,飞轮振摆几乎没有激振作用。
3) 系统振动特性与设计结构参数密切相关,主要包括作动缸有效面积Ap、液压马达排量Vm以及飞轮惯量调节系数i。
[1] 邢彤,左强,杨永帅,等.液压激振技术的研究进展[J].中国机械工程,2012,23(3):362-367,377.
Xing Tong, Zuo Qiang, Yang Yongshuai,et a1.Progresses of research on hydraulic vibration technology[J]. China Mechanical Engineering, 2012, 23(3):362-367,377.(in Chinese)
[2] 陆春月,寇子明,吴娟,等.以管路为振动输出源的液压激振系统研究[J].液压与气动,2013(2):32-34.
Lu Chunyue, Kou Ziming, Wu Juan, et a1. Research on hydro-vibration system using pipeline as vibration output source[J].Chinese Hydraulics & Pneumatics,2013(2):32-34. (in Chinese)
[3] 栾强利,陈章位,贺惠农,等.三级阀控液压振动台控制策略研究[J].振动与冲击,2014(24):138-143.
Luan Qiangli, Chen Zhangwei, He Huinong,et a1.Control strategy for a hydraulic shaker controlled with a 3-stage electro-hydraulic servo valve[J].Journal of Vibrationand Shock,2014(24):138-143.(in Chinese)
[4] 关广丰,王海涛,熊伟,等.6自由度液压振动台运动学分析及控制策略[J].振动、测试与诊断, 2011, 31 (1):89-93.
Guan Guangfeng, Wang Haitao, Xiong Wei, et al.Kinematic analysis and control strategy of 6-DOF hydraulic vibration table[J].Journal of Vibration, Measurement & Diagnosis,2011, 31 (1):89-93.(in Chinese)
[5] 邱法维,沙锋强,王刚,等.地震模拟振动台控制技术及软件研究[J].液压与气动,2011(6):98-101.
Qiu Fawei, Sha Fengqiang, Wang Gang, et a1.Shaking table control technology and software research[J].Chinese Hydraulics & Pneumatics,2011(6):98-101.(in Chinese)
[6] Yang Zhidong, Huang Qitao, Han Junwei, et a1. Adaptive inversecontml of random vibration based on the 6ltered.X LMS algorithm [J].Earthquake Engineering and Engineering Vibration, 2010,9:141-146.
[7] Tagawa Y, Kajiwara K. Controller development for the E-defense shaking table[J]. Proceedings of the Institution of Mechanical Engineers,Part I:Journal of Systems and Control Engineering, 2007, 22:171-181.
[8] 阮健,李胜,裴翔,等.2D阀控电液激振器[J].机械工程学报, 2009,45(11):125-132.
Ruan Jian, Li Sheng, Pei Xiang, et a1. Electrohydraulic vibration exciter controlled by 2D valve[J]. Journal of Mechanical Engineering,2009,45(11):125-132.(in Chinese)
[9] 李宪奎, 吴晓明, 方一鸣, 等.构造结晶器非正弦振动波形函数的方法[J] .机械工程学报, 2000, 36(1):67-70.
Li Xiakui, Wu Xiaoming, Fang Yiming,et a1.Method to construct waviness function of mold non-inusoidal oscillation [J]. Journal of Mechanical Engineering, 2000, 36(1):67-70. (in Chinese)
[10]张树忠,邓斌,柯坚.基于液压变压器的挖掘机动臂势能再生系统[J].中国机械工程,2010,21(10):1161-1166.
Zhang Shuzhong, Deng Bin, Ke Jian. Research on energy regeneration system of hydraulic excavator′s boom based on hydraulic transformer[J].China Mechanical Engineering, 2010,21(10):1161-1166.(in Chinese)
[11]吕云嵩. 转盘式变量飞轮:中国, CN201110449564. X[P].2012-11-28.
[12]吕云嵩.基于变量飞轮的节能型液压振动系统及其工作方式:中国,CN201110449545.7[P].2012-11-28.

10.16450/j.cnki.issn.1004-6801.2015.06.020
*江苏省自然科学基金资助项目(BK2012866)
2015-08-30;
2015-09-26
TH113.1
吕云嵩,男,1957年1月生,教授。主要研究方向为流体节能和流体控制技术。曾发表《阀控非对称缸频域建模》(《机械工程学报》2007年第43卷第9期)等论文。 E-mail:chengbo195701@163.com
猜你喜欢
现代电力(2022年2期)2022-05-23
模具制造(2019年7期)2019-09-25
表面工程与再制造(2019年3期)2019-09-18
智富时代(2019年5期)2019-07-05
智富时代(2019年5期)2019-07-05
汽车工程师(2019年2期)2019-03-11
时代汽车(2018年12期)2018-06-18
制造技术与机床(2017年6期)2018-01-19
中北大学学报(自然科学版)(2015年6期)2015-12-02
汽车工程师(2015年11期)2015-09-04