基于模糊算法垂直泊车转向控制策略的研究
2015-06-23 16:22王友楠方祖华徐宏兵
上海理工大学学报 2015年2期
王友楠, 方祖华, 孙 霙, 王 康, 徐宏兵
(上海师范大学信息与机电工程学院,上海 200234)
基于模糊算法垂直泊车转向控制策略的研究
王友楠, 方祖华, 孙 霙, 王 康, 徐宏兵
(上海师范大学信息与机电工程学院,上海 200234)
为提高自动泊车的精度和安全性,分析了垂直泊车的运动特性,以车辆的初始位置及泊车过程中的转向角控制为关键参数,建立了自动垂直泊车的运动模型.在Simulink环境中建立了基于模糊算法的垂直泊车转向控制仿真模型,生成了模糊规则,分析了车辆初始位置、初始角度、初始运动速度对车辆运动轨迹的影响.仿真结果显示,改变初始坐标及初始角度都会影响自动垂直泊车入库效果,确定了一次性顺利入库的最小初始位置,该数值可用来设计最紧凑停车库.该模糊算法控制灵敏且无超调.
自动垂直泊车;控制策略;模糊算法
自动泊车是通过探测车辆周围环境信息来找到合适的泊车位,从而控制车辆的转向和速度,使得车辆能够自主驶入泊车位.常见的自动泊车方式有平行泊车和垂直泊车,现多采用路径规划和基于经验控制算法(即模糊逻辑或神经网络)这两种方式来研究泊车.Jamil[1]设计出一种泊车辅助器,可帮助驾驶员方便安全地泊车,但在实现泊车的全自动方面有待改进.文献[2-3]分别基于模糊逻辑控制进行泊车系统研究,逻辑控制依赖于人的操作知识,因此需要大量的泊车实验.刘钰等[4]采用Bezier曲线对泊车轨迹进行拟合,但泊车原地转向问题需深入探究.目前采用模糊控制法,对自动泊车时变性运动有很好效果[5-8],但车辆处于不同初始位置时,采用模糊控制的车辆运动轨迹是不相同的,车辆不同的运动轨迹会导致入库成功或不成功.因此,研究不同初始位置的模糊控制车辆运动轨迹,判断其能否成功入库,是自动泊车的关键.
1 垂直泊车的运动模型
车辆在自动泊车过程中是一个全程的低速运动过程.设车库长、宽分别为5.5 m和2.4 m,建立的垂直泊车运动模型如图1所示.图中各参数定义如下:φ为车身方向角(x轴正向与车辆中心轴线的夹角),取逆时针方向为正;θ为前轮转角(车辆前轮方向与车辆中心轴线的夹角),取顺时针方向为正;v为车辆运动速度;L为轴距.

图1 垂直泊车的运动模型Fig.1 Motion model of vertical parking
(xf,yf)为车辆前轴中心坐标,(xr,yr)为车辆后轴中心坐标.坐标原点定为车辆入库后的后轴中心点.车辆后轴中心在垂直方向上速度为0[5],可以得到
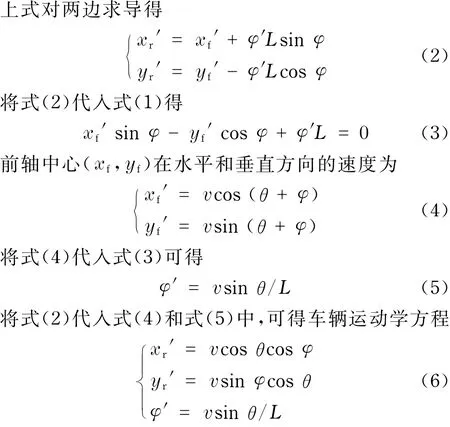
后轮轨迹在车体运动过程中完全体现车体的运动轨迹,可将后轮轴线中心坐标(xr,yr)认为是车体运动坐标,车辆的运动轨迹用(xr,yr,φ)来表示,为方便起见,用(x,y,φ)来表示.车辆入库后最终状态为(0,0,0),车辆始点位置设定为(x0,y0,φ0).系统对于车辆的控制只需要θ和v,就可以实现车辆停入车库.
2 自动垂直泊车的模糊控制
给定入库速度v=1.39 m/s,采用模糊控制θ来控制垂直泊车入库.图2为自动垂直泊车模糊控制Simulink建模,用来仿真任意初始条件的行驶轨迹.模糊规则如表1所示.
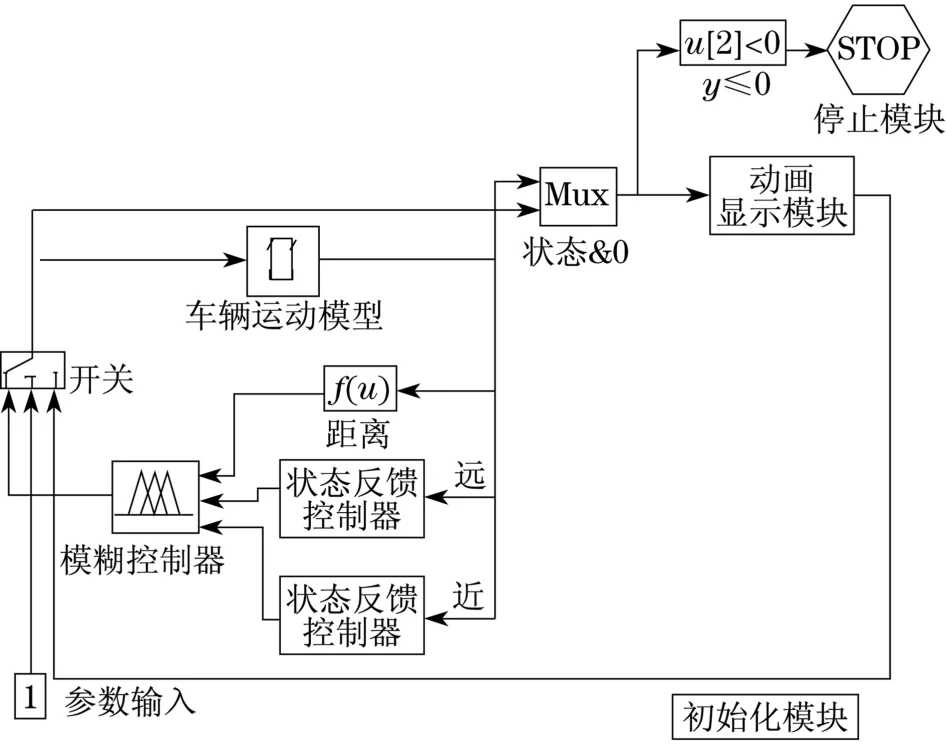
图2 自动垂直泊车模糊控制Simulink建模Fig.2 Simulink model of autonomous vertical par king fuzzy control
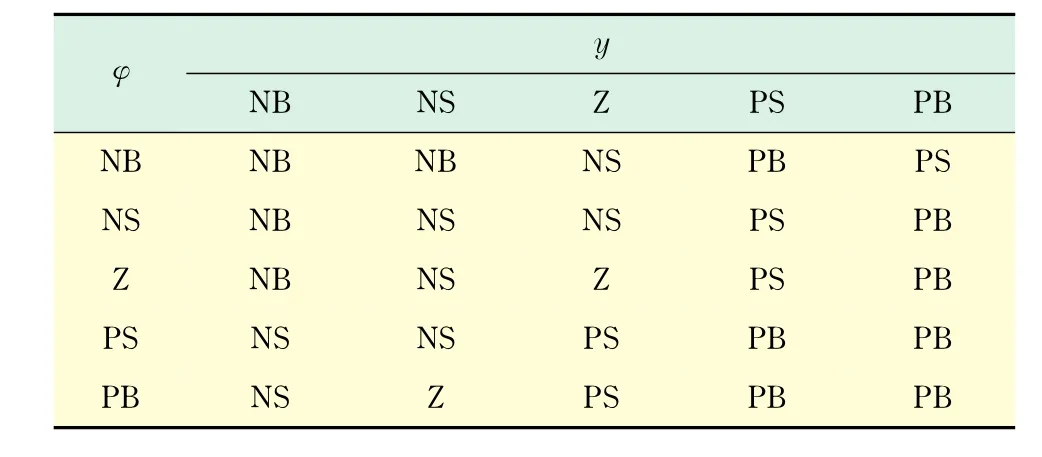
表1 车辆前轮转角的模糊规则Tab.1 Fuzzy rule set for front wheel angle
3 仿真分析
3.1 车辆初始转角φ0=0o不变,改变初始坐标(x0,y0)时的车辆运动轨迹仿真
车辆初始坐标为(4.0,8.0)时,其运动轨迹仿真如图3所示,车辆通过右转方向使车辆进入车位,与实际泊车操作相符合.从车辆端点轨迹可知,整个泊车过程中,车辆轮廓线与周围环境障碍无交点,表明车辆实现了无碰撞地进入车位,即成功入库.该初始坐标下的前轮转角θ及车身方向角φ的变化情况如图4所示,在整个泊车过程中,θ由小变大再变小,φ由0o变成90o,符合实际车辆的操作.
车辆初始坐标为(4.0,7.0)时,其运动轨迹仿真如图5所示,整个泊车过程中车辆轮廓线与左侧车库相碰,表明泊车失败.θ和φ的变化如图6所示.
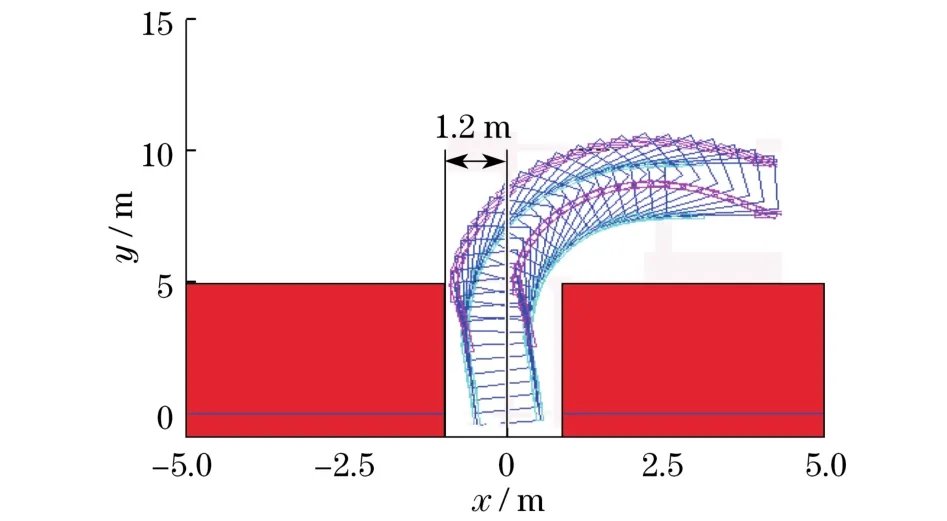
图3 初始坐标(4.0,8.0)时的车辆运动轨迹仿真Fig.3 Vehicle trajectory simulation at the initial coordinate(4.0,8.0)
本文对多种组合的初始位置进行了仿真,垂直泊车过程中车辆最左侧横坐标如表2所示(见下页).因为车库宽度为2.4 m,所以车库左侧边缘为-1.2 m,表2中阴影区域表示泊车成功的坐标值.由表2可以看出,泊车起始位置横坐标与纵坐标大于极限值时,距离原点越远,泊车效果越好.采用模糊控制后,一次性顺利入库的最小初始位置是(4.0, 8.0),该数值可用来设计最紧凑停车库,使之占地面积最小或停车最多.

图4 初始坐标(4.0,8.0)时的θ和φ变化Fig.4 Variation ofθandφat the initial coordinate(4.0,8.0)

图5 初始坐标(4.0,7.0)时的车辆运动轨迹仿真Fig.5 Vehicle trajectory simulation at the initial coordinate(4.0,7.0)
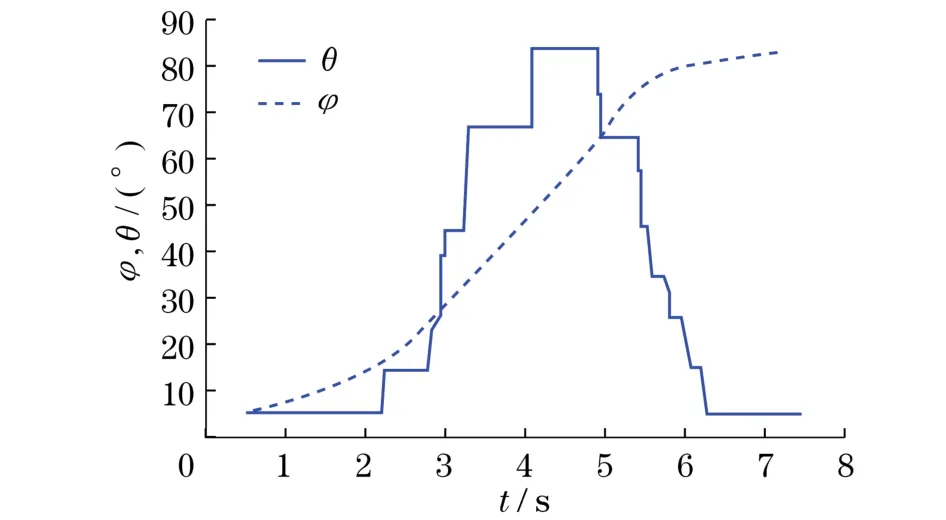
图6 初始坐标(4.0,7.0)时的θ和φ变化Fig.6 Variation ofθandφat the initial coordinate(4.0,7.0)
3.2 车辆初始坐标(x0,y0)不变,改变φ0时的车辆运动轨迹仿真
图7(见下页)是车辆初始坐标(4.0,8.0),φ0= -20°时车辆运动轨迹,当在最小初始位置为(4.0,8.0)时,初始车身方向角减小将影响垂直泊车效果,且泊车不成功.前轮θ和φ的变化如图8所示(见下页).图9(见下页)是车辆初始坐标(4.0,8.0),φ0=20°时车辆运动轨迹,当最小初始位置为(4.0,8.0)时,增大初始车身转角可以使垂直泊车顺利入库.其前轮转角θ及车身方向角φ的变化如图10所示.
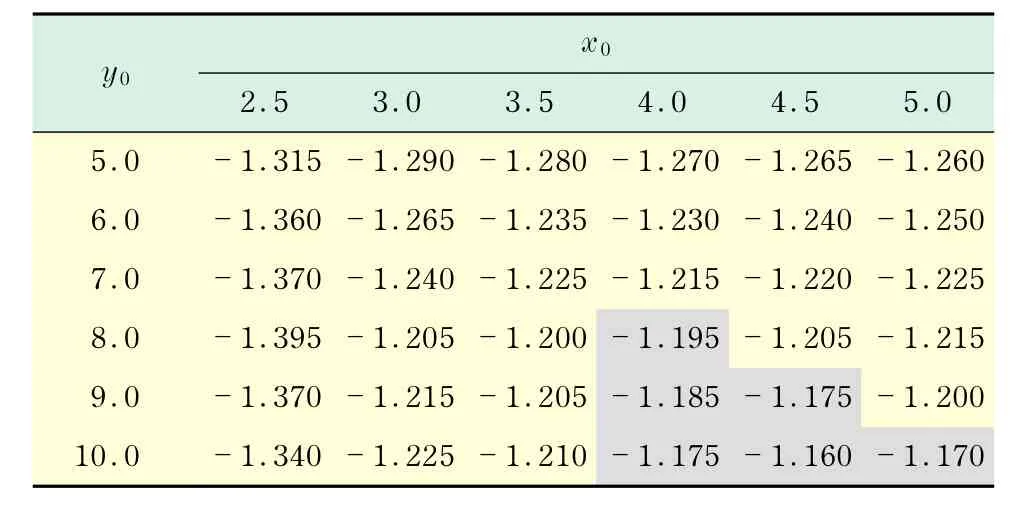
表2 泊车过程中不同初始坐标下的车辆最左侧位置Tab.2 The most left side of vehicle during the par king process at different initial coordinates

图7 初始坐标(4.0,8.0)时的车辆运动轨迹的仿真(φ0=-20°)Fig.7 Vehicle trajectory simulation at the initial coordinate(4.0,8.0)(φ0=-20°)
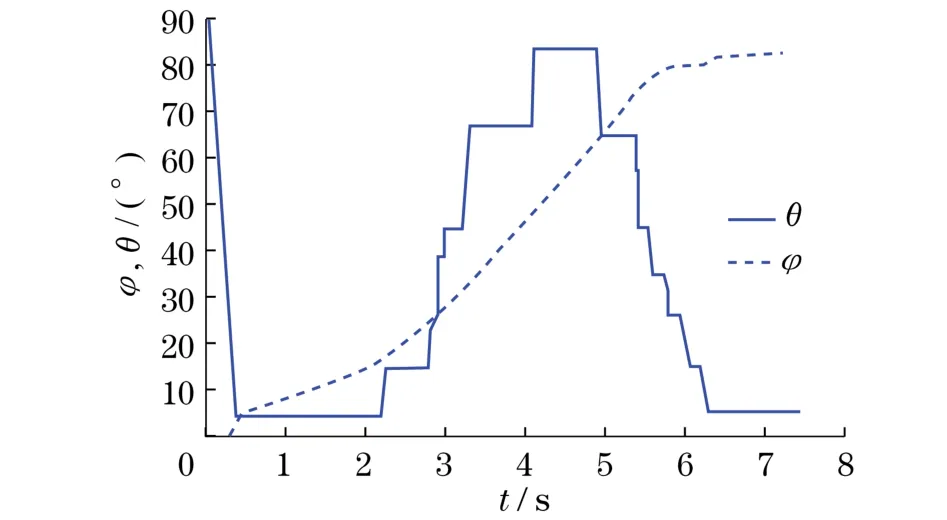
图8 初始坐标(4.0,8.0)时的θ和φ(φ0=-20°)Fig.8 Variation ofθandφat the initial coordinate(4.0,8.0)(φ0=-20°)
改变不同初始位置,泊车过程中车辆运动最左侧位置的仿真结果见表3,可以看出改变车身转角会影响入库效果,初始车身转角越大,泊车入库效果越好,从而来建造更紧凑的停车场.紧凑型的停车场可以采取增大初始车身转角的方式,车辆也可顺利入库.
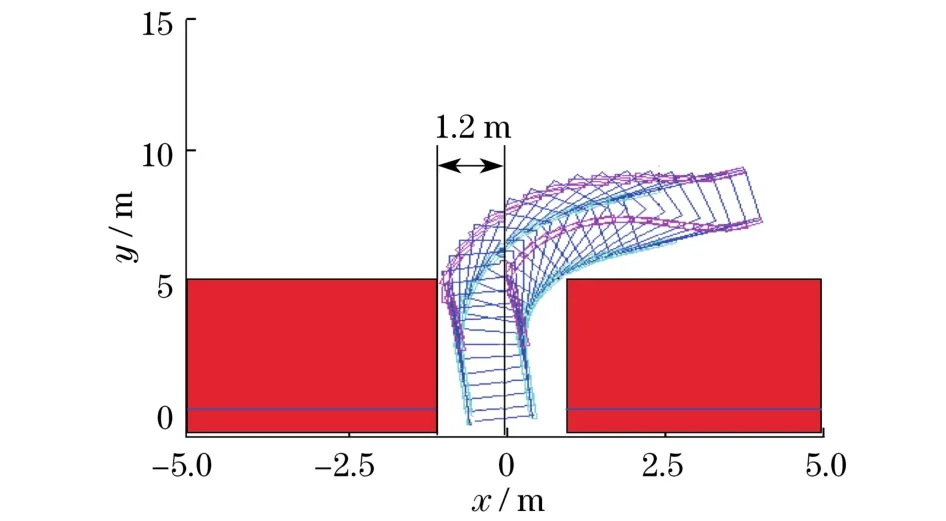
图9 初始坐标(4.0,8.0)时的车辆运动轨迹仿真(φ0=20°)Fig.9 Vehicle trajectory simulation at the initial coordinate(4.0,8.0)(φ0=20°)
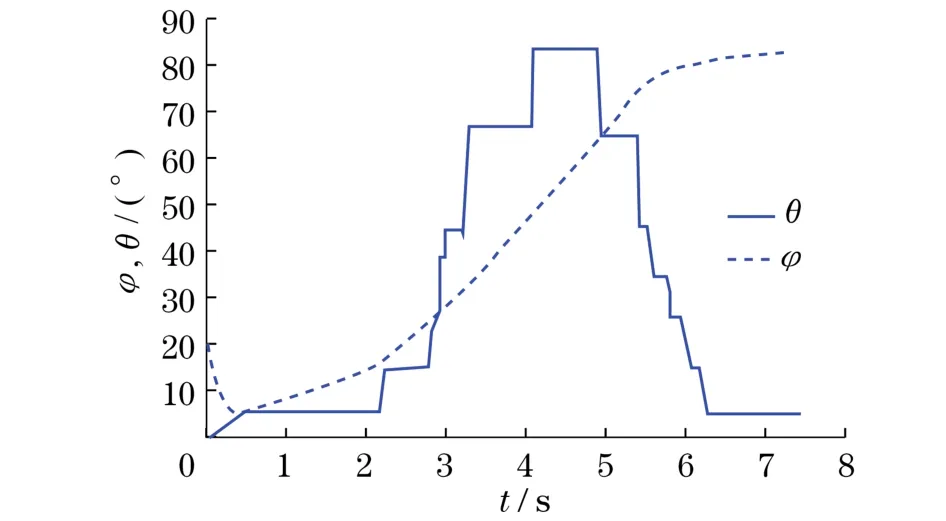
图10 初始坐标(4.0,8.0)时的θ和φ(φ0=20°)Fig.10 Variation ofθandφat the initial coordinate(4.0,8.0)(φ0=20°)
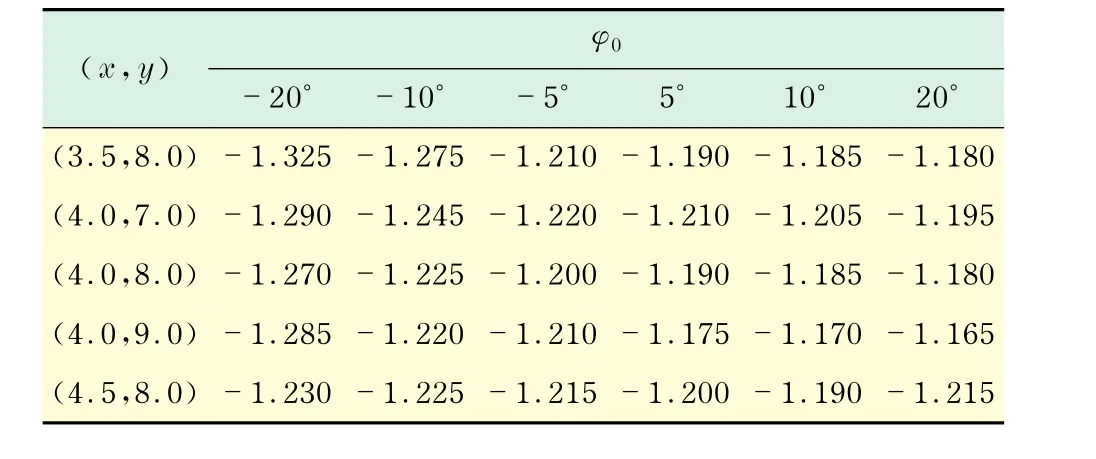
表3 泊车过程中不同初始方向角下的车辆最左侧位置Tab.3 The most left side of vehicle during the parking process at different initial direction angles
4 结 论
通过对泊车过程分析,建立了自动垂直泊车的运动模型.基于Simulink建立了自动垂直泊车的模糊控制仿真模型.在计算中,改变车辆后轴中心点初始坐标值以及车身方向角,仿真结果表明:在超过极限位置的范围时,无法实现无碰壁泊车,改变初始泊车角度可改善泊车效果;初始坐标超过极限范围时,增大初始角度可使泊车无碰壁入库,在极限范围内减小初始角度也会使泊车失败.
[1] Jamil T.Design and implementation of a parking helper [C]∥Proceedings of the World Congress on Engineering and Computer Science.San Francisco: IEEE,2009:978-988.
[2] Nejad M K.Fuzzy logic based autonomous parallel parking of a car-like mobile robot[D].Montreal: Concordia University,2006.
[3] Lee J Y,Lee J J.Multiple designs of fuzzy controllers for car parking using evolutionary algorithm[C]∥Proceedings of the 4th IEEE International Conference on Mechatronics.Kumamoto:IEEE,2007:1-6.
[4] 刘钰,马艳丽,李涛.基于Bezier曲线拟合的自主平行泊车轨迹模型仿真[J].科技导报,2011,29(11):59-61.
[5] 孟繁微.车辆垂直泊车转向控制算法研究[D].长春:吉林大学,2011.
[6] 黄贞辉,陈玮,涂建.家用变频空调温度模糊控制算法研究[J].上海理工大学学报,2013,35(2):169-174.
[7] 杨昔阳,尤晴曦,李洪兴.基于变论域理论的自动倒车控制[J].北京师范大学学报(自然科学版),2005,41 (4):348-350.
[8] 魏赟,韩印,范炳全.基于多智能体和模糊控制的道路交叉口建模与仿真[J].上海理工大学学报,2010,32 (3):259-262.
(编辑:董 伟)
Steering Control for Autonomous Vertical Par king Based on Fuzzy Algorithm
WANG Younan, FANGZuhua, SUN Ying, WANGKang, XUHongbing
(College of Mechanical and Electronic Engineering,Shanghai Normal University,Shanghai 200234,China)
In order to improve the precision and security of autonomous parking,a steering kinematics model was establised,taking the initial position and steering-angle as key control factors,and a parking steering control simulation model based on fuzzy algorithm was built with the help of Simulink.Fuzzy rules were established and the autonomous vertical parking was simulated. The influences of initial position,initial angle,and initial speed on vehicle trajectory were analyzed. The simulation shows that changing initial parameters will affect the autonomous vertical parking effect.The minimum initial position for a one-time smoothly parking was determined.The simulation shows that fuzzy control algorithm is sensitive and of no overshoot.
autonomous vertical parking;steering control;fuzzy algorithm
U 462.1
A
1007-6735(2015)02-0155-04
10.13255/j.cnki.ju sst.2015.02.011
2013-12-11
上海市地方院校能力建设计划项目(12160503000)
王友楠(1988-),男,硕士研究生.研究方向:电控技术.E-mail:spartainic@yahoo.com
方祖华(1964-),男,教授.研究方向:内燃机燃烧及排放控制、新能源技术.E-mail:zuhfang@shnu.edu.cn
猜你喜欢
汽车实用技术(2022年19期)2022-10-19
汽车实用技术(2022年7期)2022-04-20
中学生数理化·七年级数学人教版(2021年9期)2021-11-20
军民两用技术与产品(2020年3期)2020-04-07
解放军健康(2017年5期)2017-08-01
知识经济·中国直销(2016年2期)2016-11-07
西南交通大学学报(2016年3期)2016-06-15
电子制作(2016年21期)2016-05-17
通信电源技术(2016年5期)2016-03-22
探测与控制学报(2015年4期)2015-12-15