城市道路人行横道处驾驶人决策行为规律及损失
2015-06-24 13:42程国柱吴立新秦丽辉刘博通
哈尔滨工业大学学报 2015年9期
程国柱,吴立新,秦丽辉,刘博通
(1.哈尔滨工业大学交通科学与工程学院,150090哈尔滨;2.吉林建筑大学交通科学与工程学院,130018长春;3.东北农业大学水利与建筑学院,150030哈尔滨)
城市道路人行横道处驾驶人决策行为规律及损失
程国柱1,吴立新2,秦丽辉3,刘博通1
(1.哈尔滨工业大学交通科学与工程学院,150090哈尔滨;2.吉林建筑大学交通科学与工程学院,130018长春;3.东北农业大学水利与建筑学院,150030哈尔滨)
为给驾驶人在城市道路人行横道处安全通行提供决策依据,通过进行驾驶人决策与风险感知试验,对驾驶人的感知风险及决策行为进行分析.给出了驾驶人感知风险随机动车速度变化的规律及驾驶人决策行为的损失函数,基于概率论构建了驾驶人碰撞风险概率模型,并标定了在不同车速等级下的行车延误和碰撞风险损失.研究结果表明:当行车速度较低时,驾驶人采取匀速和加速为较优策略,而减速则会增加损失;当行车速度处于中等时,驾驶人采取加速、减速、匀速策略损失相差不大,但以匀速较优;当行车速度较高时,驾驶人对于自身的最优策略应该是保持匀速通过.
城市道路;人行横道;驾驶人;决策行为;损失函数;交通安全
随着城镇化进程的加速及人民生活水平的不断提高,我国机动车保有量呈现出几何增长趋势.而我国又是人口大国,城市道路交通系统运行的特征表现为严重的人车混行.在现有的行人过街设施中,未设置行人过街信号的人行横道占绝大部分,在通过这种过街设施时,驾驶人往往会以自我为中心,没有考虑交通弱者的优先通行,这就导致车辆与过街行人的交通冲突可能性加大.因此,机动车与行人冲突成为道路交通安全研究领域的热点之一.本文研究正是基于上述背景,力图在理论上实现驾驶人决策行为的安全性与损失研究,在实际应用方面,可使行人事故数量及严重性大幅度降低.
国外学者通过研究认为,冲突碰撞的可能性可以作为评价交通安全措施的手段,并且机动车和行人的碰撞概率与机动车的速度分布有关[1];文献[2]评价了交通流中不同的ISA(智能速度适配)百分数如何影响行人的安全.文献[3]研究了安全岛、信号灯及人行横道等设施的设置对机动车行驶速度和行人过街风险的影响.文献[4-5]建立了人车冲突严重程度的判别指标,对人车冲突中行人及车辆的避险特征进行了总结与分析,建立了饱和流率不超过0.7时的人车一般冲突频数预测模型及严重冲突频数预测模型.文献[6]提出了基于过街交通冲突率的交叉口行人过街安全可靠度计算方法;文献[7]建立了行人过街间隙选择行为概率与安全间隙之间的数学关系模型.
综上所述,由于国外行人过街方式、车辆遇到行人时的避险方式及路权的法律保障与我国存在根本的区别,所以这些研究成果很难在我国直接得到应用.其次,目前国外在行人车辆冲突方面的研究多集中于人-车冲突风险及碰撞理论,这些模型本身是在假定的交通流模型以及车辆动力学模型的基础上发展起来的,而在实测行人与机动车冲突特性的研究方面则略显不足.国内的相关研究则均是从行人角度考虑或仅仅从交通流参数入手研究人-车冲突特征,而没有考虑与之冲突的机动车驾驶人决策行为的影响.本文拟开展城市道路人行横道处驾驶人风险感知与决策行为规律分析,在此基础上构建人-车碰撞风险概率模型,给出驾驶人决策损失函数,为驾驶人提供决策参考.
1 试验方案设计
取95%的置信水平,根据统计学公式计算得到本试验的最小样本容量为64.03次,向上取整得到70次.为保证试验数据满足样本量要求,同时考虑到剔除离群值的需要,本试验最终将试验样本量定为80次.
本试验选择在天气状况良好的白天,由于本试验中,车辆的最高行驶速度达到70 km/h,且需模拟过街行人参与,具有较高的危险性,故为降低试验风险,试验选择白天车流量较小的时段,为08:00—10:30和14:00—16:30.
本试验选择80名富有经验、操作熟练的驾驶人.驾驶人年龄在20~50岁之间,身体状况良好.本试验需要记录员1名,坐在副驾驶座位.
本试验路段选择在哈尔滨市群力新区,该区道路建设标准较高,车流量小,且视距良好,能够保证驾驶人以预定车速行驶,适宜开展试验.根据试验要求选择景观东路和景观西路作为试验路段,两条路均为单向3车道,人行横道宽度5 m,限速70 km/h.
试验步骤:1)在试验路段上,选取4段试验区,各试验区相隔100 m.2)在每个试验区的末端各安排1名过街行人,要求过街行人站在行车道标线一侧.驾驶人按照试验预定的初始速度v0驶入第一个试验区的起点,并在驶离后调整车速,在达到下一个试验区前调整至速度v0.3)当车辆驶入试验区时,记录员记录驶入时刻t0,并记录驾驶人的决策(加速、减速、匀速).4)当车辆驶离试验区后,驾驶人应向记录员报告其对该次试验的风险评估(采用5分制原则,即5个评判等级:非常危险、比较危险、一般危险、略有危险、无危险),记录员作以记录.5)重新设定车辆进入试验区的速度v0,变化范围为20~70 km/h,步长为10 km/h,重复步骤1~4.
2 驾驶人风险感知与决策行为分析
2.1 驾驶人风险感知分析
在不知道行人将采取如何决策的情况下,驾驶人对面临的风险的判断,主要取决于初始车速,了解驾驶人对风险判断关于车速变化的规律显得尤为重要.
本文将风险分为无危险、略有危险、一般危险、比较危险和非常危险5个等级,并分别对应数字1、2、3、4、5.通过试验数据可以看出,随着车速的提高,驾驶人判断的碰撞风险也越来越高,如图 1所示.
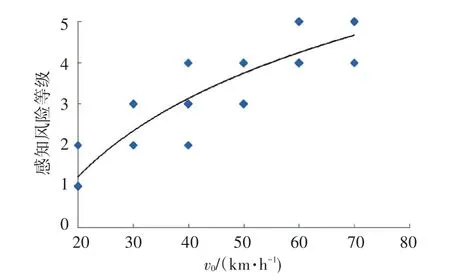
图1 驾驶人行驶速度与感知风险等级关系
由图1可以看出,当初始速度在40 km/h以下时,驾驶人对风险评估较低,但在这一区间,驾驶人感知的风险随车速变化上升较快;在初始速度为40~60 km/h时,驾驶人感知的风险随车速变化的趋势逐渐变缓,主要集中在“一般危险”和“比较危险”两个等级;而当初始车速超过60 km/h后,驾驶人普遍认为风险很高.
2.2 驾驶人决策行为分析
驾驶人感知的风险不同,采取的策略也有所差异.这其中有驾驶人追求最大利益的因素,同时受驾驶人根据驾驶经验猜测行人可能作出的决策的影响.下文将通过试验数据,分析驾驶人在不同的感知风险下所采取的决策行为,并探讨其原因.
根据试验,当驾驶人感知的风险处于“无危险”和“略有危险”级别时,约64%的驾驶人会选择加速,约36%的驾驶人选择车速不变.
当初始车速处于较低状态下,驾驶人感知风险较低,此时驾驶人保持匀速即可避让行人,使其通过;但有相当多驾驶人采取适当加速抢行,分析其原因应为驾驶人根据驾驶经验,虽然不知道行人将采取何种策略,但可以通过加速的方式逼迫行人等待而实现自身优先通行.在此种情境下,驾驶人一般对于加速度有所控制,以便情况发生变化时可以采取挽救措施.
当驾驶人感知的风险处于“一般危险”级别时,约60%的驾驶人选择车速不变,35%的驾驶人会选择加速,5%的驾驶人选择减速.与上一情形类似,驾驶人根据经验,一般会采取匀速或加速行为向行人发出信号,从而迫使行人选择回避,而自身可以优先通过付出最少的延误.但由于车速和风险的提高,多数驾驶人不会选择加速这一更加冒险的行为.
当驾驶人感知的风险处于“比较危险”级别时,约72%的驾驶人选择减速,28%的驾驶人会选择匀速.
而当驾驶人感知的风险处于“非常危险”级别时,所有驾驶人都选择了减速.此时行车速度一般很高,驾驶人的心理特征受车速的影响非常明显,在不知道行人策略的情况下,驾驶人此时会尽最大可能降低风险,这也就解释了为什么所有的驾驶人都选择减速.
3 驾驶人决策损失分析
3.1 驾驶人决策损失
在决策过程中,如果驾驶人无需减速通过而不发生碰撞,则驾驶人的损失L=0;如果驾驶人需要减速,或者与行人发生碰撞导致事故,则此时其损失L>0.这里的损失不仅考虑时间损失,也有因人车碰撞而导致的经济损失.显然,驾驶人的损失可分为两部分,即延误和风险.
发生冲突时,驾驶人尽可能选择有利于自己的策略,但损失不可避免.驾驶人要么选择降低车速增加自身延误,要么选择匀速或加速通过而带来安全风险.为简化所需考虑的因素,可将损失同量纲化,则驾驶人的策略行为将以实现最少的损失为目标.
假设驾驶人因减速造成的延误损失为Ld,如果驾驶人为减小冲突采取减速让行,此时驾驶人将比正常行进时消耗更多的时间,初始行驶速度越高,减速度越大,则驾驶人的延误损失越多.如果驾驶人选择匀速或加速通行,此时驾驶人不会产生延误损失,但有可能会增加碰撞的风险.由以上分析可以看出,驾驶人的延误损失既与行车速度有关,也与驾驶人决策行为有关.
风险表现为面临的潜在损失,即驾驶人为追求利益最大化采取决策时所带来的损失.这种损失具有不确定性,也正是由于损失的不确定性,驾驶人需要根据自己的经验进行判断,从而采取最利于自己的策略.
在人-车冲突过程中,风险表现为交通事故,亦

人-车冲突过程中,若驾驶人或行人出现判断错误,则可直接导致交通事故.如图2所示,机动车A与过街行人B在机动车道上的冲突区域(阴影部分)面积为车宽乘以安全距离(图中的黑色实心点为行人位置示意,其大小并非代表实际尺寸).即发生碰撞.根据现行法律法规,在机动车与行人碰撞事故中,驾驶人将成为主要责任方,将承受巨大的经济损失.假设驾驶人因碰撞所产生的损失为Lc,则Ld远小于Lc.
在不知道过街行人会采取何种策略的情况下,驾驶人单方面采取减速决策将显著降低发生碰撞的风险,即发生碰撞的概率,设碰撞的概率为Pc,则此时驾驶人承担碰撞的损失为Pc·Lc,此时Pc很低;如果驾驶人选择匀速或加速通行,此时发生碰撞的概率变大,Pc显著上升.综上分析,构建驾驶人决策损失函数为
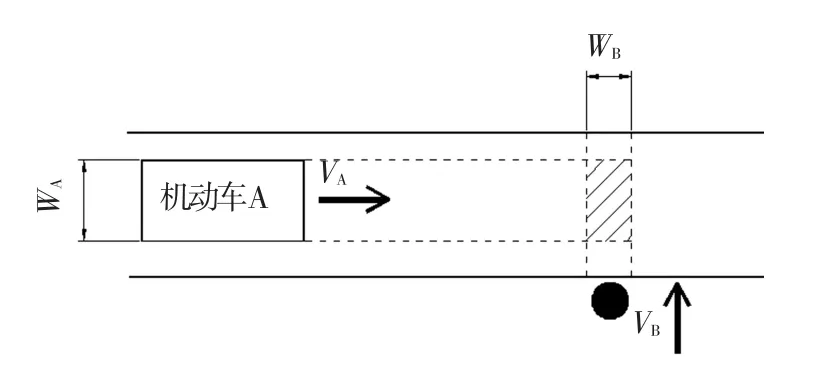
图2 人-车冲突示意
在图2中,A和B不发生交汇的条件应为A离开冲突区时B还未到达,或A到冲突区时B已通过.分别表述为
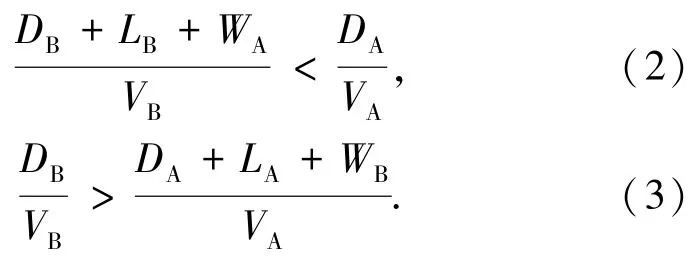
式中:DB为过街行人B距离冲突区域边缘的距离,m;LB为过街行人B在行进方向上需要的安全距离,m;WA为机动车A宽度,m;VB为行人过街步行速度,m/s;DA为机动车A距离冲突区域边缘的距离,m;VA为机动车行驶车速,m/s;LA为机动车A的长度,m;WB为过街行人B垂直于行进方向上需要的安全距离,m.
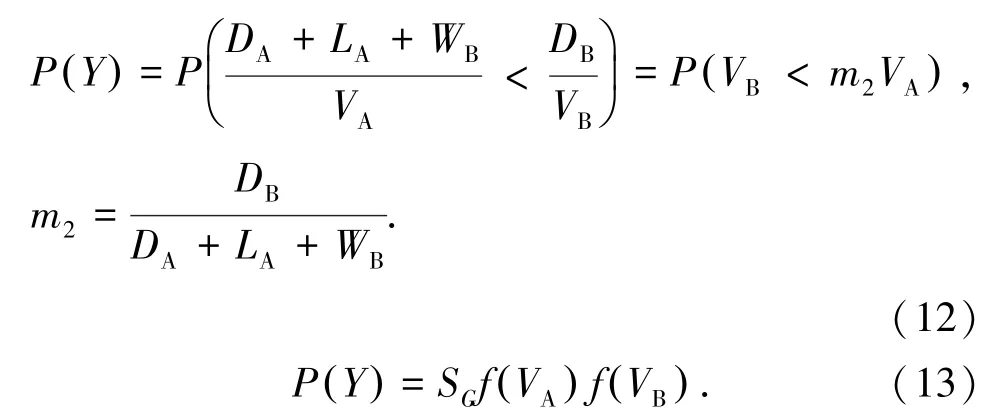
只要满足式(2)、(3)中的其中一个,就不会发生事故,如果两个均不满足,则会发生事故,则发生碰撞的概率Pc为
(1)规模大:大型网络课程的在线特性,决定了它没有空间容纳度、没有课堂管理制度的约束,可以接受没有上限的在线人数。在线平台的注册用户数以万计,这种大规模的课程,才是典型的 MOOCs。

事件X和Y不能同时发生,其为互斥关系,因而式(5)可化为

又

设VA和VB服从均匀分布,则有
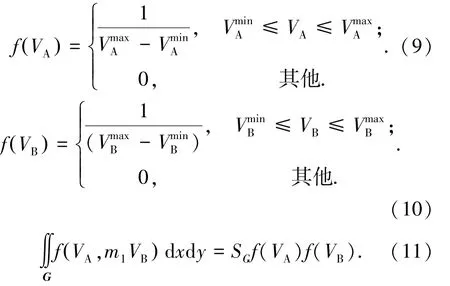
式中:f(VA)为VA的密度函数;f(VB)为VB的密度函数;G为VA、VB的变化范围与VA<m1VB围成的区域;SG为G的面积,如图3所示.
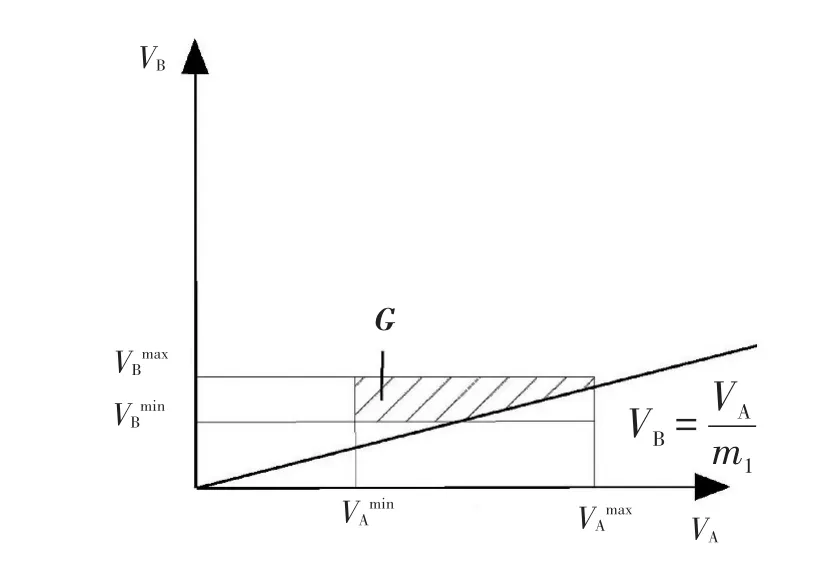
图3 VA和VB的定义域G
VA的变化可从每次试验中记录的机动车A以及起始和终止速度获得,VB的变化可根据录像获得,因此VA和VB的范围可以确定,从而可以解出P(X).
同理,可得P(Y)的计算式为
最终由式(4)解出Pc值,结合试验中测得的不同速度等级下驾驶人的决策行为及机动车速度变化情况,可以计算出不同决策的碰撞风险概率.
3.3 驾驶决策损失计算
结合文献[8-9],确定将低速划分为40 km/h以下,中速为40~60 km/h之间,高速为60 km/h以上.根据实测数据,计算得到不同等级车速下驾驶人采取减速、匀速、加速策略时的碰撞风险概率,如表1所示.
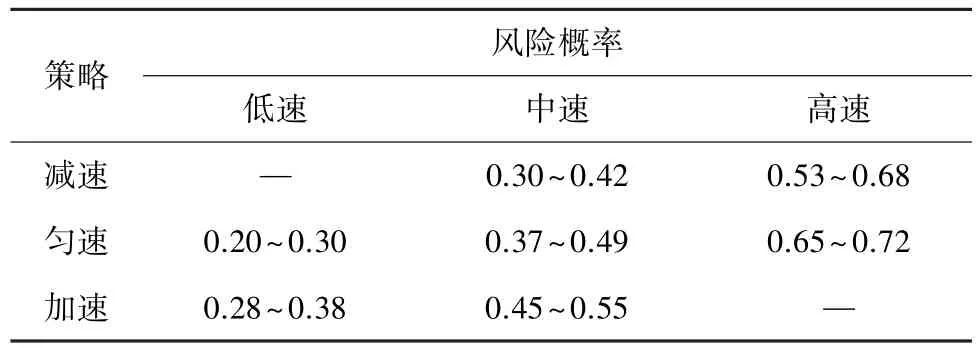
表1 不同车速下驾驶人决策碰撞风险概率
驾驶人的决策损失分为延误和风险两部分,在研究中需要进行无量纲化.机动车行驶速度越高,驾驶人采取减速策略所带来的延误Ld越大,这种变化近似线性,由此设定延误与车速等级的关系:低速、中速与高速时对应的延误损失分别为1、2、3.
文献[10]研究的车速与过街行人死亡概率的关系,表明车速越高,碰撞后带来的损失越大.同时,由于碰撞的损失明显大于延误的损失,即Lc>Ld.综上所述,设定机动车风险损失:低速、中速与高速时对应的风险损失分别为2、6、10.
值得指出的是,本文对驾驶人决策行为所产生的延误损失及碰撞风险损失的设定,仅是规律性界定,并非代表实际损失,如何将驾驶人决策行为损失货币化尚有待进一步研究.
根据驾驶人决策行为的损失函数,在给出不同车速下驾驶人的延误和风险损失及碰撞风险概率后,可以计算不同车速下,驾驶人决策行为的损失值,如表2所示.

表2 驾驶人决策损失值
从表2中可以看出,当行车速度较低时,驾驶人采取匀速和加速为较优策略,而减速则有可能增加损失.其原因主要是此时行车速度较低,驾驶人对风险损失不敏感,故更期望通过加速而优先通过,从而避免延误损失;当行车速度处于中等时,驾驶人采取加速、减速、匀速策略收益相差不大,但以匀速较优.其原因是在中速条件下,驾驶人需要同时权衡风险与延误,因此其决策将受更多因素影响,驾驶人先采取匀速策略,再根据行人的决策调整策略,能更有效保证自己的收益;当行车速度较高时,驾驶人减速对降低风险的作用不如匀速,减速反而会带来较大的延误损失,因此在高速阶段,驾驶人对于自身的最优策略应该是保持匀速通过.
4 结 论
1)当行车速度低于40 km/h时,驾驶人对碰撞风险评估较低,但其感知的风险等级随车速变化上升较快;当行车速度为40~60 km/h时,驾驶人感知的碰撞风险主要集中在“一般危险”和“比较危险”两个等级,其随车速变化的趋势变缓;当车速超过60 km/h时,驾驶人普遍认为碰撞风险很高.
2)当驾驶人感知的风险等级为“无危险”和“略有危险”时,多数驾驶人会选择加速;当驾驶人感知的风险等级为“一般危险”时,多数驾驶人会选择匀速通过;当驾驶人感知的风险等级为“比较危险”和“非常危险”时,多数驾驶人会选择减速.
3)当行车速度为低速和中速时,驾驶人减速所带来的损失最大;当行车速度为高速时,驾驶人加速所带来的损失最大;无论车速处于低速、中速还是高速,驾驶人采取匀速通过所带来的损失值均为最小.
4)驾驶人个体具有差异性,故在下一步研究中应对不同性别、年龄、驾龄的驾驶人开展研究,深入研究其决策行为规律与损失.
[1]DAVIS G A.Method for estimating effect of traffic volume and speed on pedestrian safety for residential streets[J]. Transportation Research Record,1998(1636):110-115.
[2]MA Xiaoliang,ANDRÉASSON I.Predicting the effect of various ISA penetration grades on pedestrian safety by simulation[J].Accident Analysis and Prevention,2005,37(6):1162.
[3]KING M J,DAVID S,AMENEH G.Pedestrian crossing at signalised intersections:incidence and relative risk[J]. Accident Analysis&Prevention,2009,41(3):485-490.
[4]王俊骅,方守恩.路段行人-机动车冲突观测方法及冲突特性[J].同济大学学报:自然科学版,2008,36(4):503-507.
[5]王俊骅,方守恩.行人机动车冲突模型及其行人过街风险控制应用[J].同济大学学报:自然科学版,2009,37(9):1191-1195.
[6]马兰,王肇飞.基于交通冲突的交叉口行人过街安全性分析[J].交通标准化,2011(11):131-134.
[7]朱芳芳.无信号控制交叉口行人过街间隙选择模型研究[J].交通信息与安全,2011,29(2):36-40.
[8]CJJ37—2012城市道路工程设计规范[S].北京:中国建筑工业出版社,2012.
[9]马莹莹,杨晓光,曾滢.城市道路自由车速与车道宽度关联性分析[J].同济大学学报:自然科学版,2009,37(12):1621-1626.
[10]刘志强,王兆华,钱卫东.基于速度的交通事故分析[J].中国安全科学学报,2005,15(11):35-38.
(编辑 魏希柱)
Drivers’decision behavior rule and loss at urban road crosswalk
CHENG Guozhu1,WU Lixin2,QIN Lihui3,LIU Botong1
(1.School of Transportation Science and Engineering,Harbin Institute of Technology,150090 Harbin,China;2.School of Transportation Science and Engineering,Jilin Jianzhu University,130018 Changchun,China;3.School of Water Conservancy and Civil Engineering,Northeast Agricultural University,150030 Harbin,China)
In order to provide decision for drivers at urban road crosswalk,experiment of driver’s decision and risk perception was conducted.And driver’s perceptional risk and decision were analyzed.Changing rule of driver perceptional risk with speed variation was given,and driver’s decision loss function was put forward.Collision risk probability model was established based on probability theory.Loss for delay and collision risk was calibrated respectively.The redult is that driver should keep uniform speed or accelerate at low speed,and deceleration will increase loss;at medium speed,there is no evident difference for driver among acceleration,deceleration and keeping uniform speed,but keeping uniform speed is better;at high speed,the best solution is keeping uniform speed.
urban road;crosswalk;driver;decision behavior;loss function;traffic safety
U491
A
0367-6234(2015)09-0063-05
10.11918/j.issn.0367-6234.2015.09.012
2014-05-04.
国家自然科学基金(51108136);吉林省自然科学基金(201215176).
程国柱(1977—),男,博士,副教授.
秦丽辉,qinlh1977@163.com.
猜你喜欢
公民与法治(2022年7期)2022-07-22
中国特种设备安全(2022年1期)2022-04-26
意林(2021年5期)2021-04-18
扬子江(2019年1期)2019-03-08
电子制作(2019年24期)2019-02-23
装备制造技术(2018年8期)2018-10-17
汽车维护与修理(2018年1期)2018-04-04
作文周刊·小学一年级版(2017年27期)2017-08-10
小天使·一年级语数英综合(2017年6期)2017-06-07
汽车与安全(2016年5期)2016-12-01