变频器故障诊断及容错控制研究综述
2015-06-24 06:23徐殿国刘晓峰
电工技术学报 2015年21期
徐殿国 刘晓峰 于 泳
(哈尔滨工业大学电气工程及自动化学院 哈尔滨 150001)
0 引言
近年来,由于电力电子技术、功率半导体技术、微处理器技术及电机控制理论的快速发展和不断完善,交流电动机控制技术日趋成熟,应用越来越广泛,而作为交流电动机主要控制方式的变频调速技术也取得了前所未有的进步。
变频调速系统由变频器和电动机组成,变频器易在复杂的自然环境(结露、腐蚀、粉尘、高低温等)和电磁环境(EMI、过电压、过电流等)下发生故障。变频器的故障可能导致巨大的经济损失,甚至严重危害操作人员安全。据文献报道,由于变频器驱动的高压冲床“瞬间剧震”和“飞车”而导致的操作人员被夹、被卷事件屡见不鲜,绝大多数事故是由于变频器发生了故障,而其自身又未能检测出故障的发生。进一步来讲,如果变频器自身能够检测出故障并采取异常停机措施,虽在一定程度上可以降低操作人员的工作危险性,但在工业系统运行过程中,由于生产工艺的连续性需求,异常停机会造成着巨大的经济损失。
国外已经开始重视变频器的应用安全性需求(Safety and Security Needs),建立了EN ISO 13849-1 和IEC 61800-5-2 两个相关标准,规范了诸如安全转矩关闭(Safety Toque Off,STO)和安全停机(Safety Stop,ST)等技术要求,其核心思想是如何在故障之后利用转矩关闭等措施保证操作人员安全,但其并未规范故障后安全容错运行方面的要求。
故障诊断技术(Fault Diagnosis Technology)起源于20 世纪中期,是指对正在运行的机械或电子设备进行状态监测,及时发现设备异常状态,分析故障发生的原因,并对设备未来的状态进行预测的各种技术的总称[1]。容错控制(Fault Tolerant Control,FTC)的思想可以追溯到20 世纪70年代,其思想的建立与故障诊断技术息息相关。在设备运行过程中,有可能出现各种故障,如果在故障发生后,系统可以重新配置并自动隔离故障带来的影响,并可在设备不停机的情况下继续运行,就称该闭环系统为容错控制系统[2]。
变频调速系统中主要有3 种故障模式:①电气故障,如定子故障(断相、短路、漏电等)[3,4]、转子故障(转子断条、环端开裂等)[5,6]、逆变器故障(输出短路、逆变桥IGBT 开路等)[7]、直流母线电容老化或损坏[8]等;②机 械 故 障,如 轴 承 故 障[9,10]、气 隙 偏心[11,12]等;③传感器故障,如电流传感器或速度传感器开路[13]、传感器敏感度降低等。
本文从变频器的开关管、速度传感器和电流传感器3 个方面综述了变频器的故障诊断及容错控制方法,并对高故障容限变频器的发展方向进行了展望。
1 开关管的故障诊断及容错控制
1.1 开关管的故障诊断
在变频器-电动机构成的控制系统中,变频器部分发生故障的几率远高于电动机。而在变频器中,逆变桥IGBT 的开路和短路故障又占了相当大的比重。据统计,38%的变频器故障是由变频器的功率开关器件引起,所以变频器逆变桥IGBT 故障的诊断方法是高故障容限变频器研究的热点问题。IGBT 的故障主要有短路和开路两种。短路故障已有成熟的硬件解决方案,即通过检测IGBT 的管压降,可以准确定位故障管。IGBT 开路故障也时有发生,一方面是由于过电流烧毁,导致开路;另一方面是由于接线不良、驱动断线等原因导致的驱动信号开路。相对于短路故障而言,开路故障发生后往往电动机还能继续运行,所以不易被发现,但其同样危害较大,因为此时其余IGBT 将流过更大的电流,易发生过电流故障,且电动机电流中存在直流电流分量,会引起转矩减小、发热、绝缘损坏等问题,如不及时处理开路故障,会引发更大的事故。
归纳国内外学者在IGBT 开路故障诊断方法上所展开的研究,主要有专家系统法、电流检测法、电压检测法和智能算法4 种。
1.1.1 专家系统法[14-16]
基于经验积累,将可能发生的故障一一列出,归纳出规律并建立知识库,当发生故障时只需观测故障现象,查询知识库即可判断故障类型,难点在于难以穷尽所有的故障现象并得到完备的故障知识库,而有些故障模态往往与变频器正常运行时的某种状态非常相似,造成了难以准确匹配故障。
1.1.2 电压检测法[17]
通过考察变频器故障时电动机相电压、线电压或中性点电压与正常时的偏差来诊断故障。只需要1/4基波周期便能检测出故障,大大缩短了诊断时间,但这种方法需要增加电压传感器,通用性差。
1.1.3 智能算法
人工神经网络、小波分析、模糊控制等方法也应用于开关管的开路故障诊断中,取得了较好的效果。文献[18]将小波分解与模糊算法相结合,首先应用小波分析得到电流的变化信息,据此得到电流的直流分量,然后将直流分量的极性与数值输入模糊算法中,判别开路故障的发生。文献[19]将三相电流信息用于故障的诊断和分类,首先应用小波变换得到故障特征信息,这些信息体现在小波分解的系数之中,然后应用BP 人工神经网络来识别开关管处于故障或健康状态,通过仿真验证,故障判别错误率小于5%。文献[16]将自适应神经模糊推理系统(ANFIS,Adaptive Neuro-Fuzzy Inference System)和聚类分析相结合,首先将三相电流进行dq分解,然后将dq 轴电流输入ANFIS系统中进行聚类分析,分类得到不同的模糊故障模态,这种聚类分析方法降低了模糊模型的阶数和神经网络的训练时间。文献[20]采用了一种基于模型的神经网络故障诊断方法,将闭环电动机驱动系统建模,应用三相电压、电流、电磁转矩训练人工神经网络,诊断单个IGBT 管开路故障和桥臂开路故障。
1.1.4 电流检测法
电流检测法最为常用,其又派生出平均电流Park矢量法[21,22]、单电流传感器法[23]和电流斜率法[24]等,平均电流Park 矢量法以Coimbra 大学的J.A.A.Caseiro教授发表的研究成果为代表,首先对三相电流Ia、Ib、Ic进行Park 变换
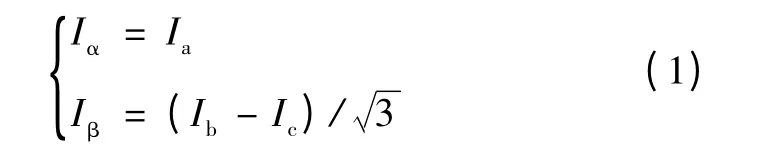
然后计算Iα和Iβ一个周期内的平均值

得到平均电流Park 矢量的模和相角为

正常无故障情况下,一个周期内的电流平均值为零,平均电流Park 矢量的模为零。某开关管发生故障时,Iα或Iβ出现直流分量,Park 矢量的模大于某阈值,据此诊断出有故障发生,再根据Park 矢量的相位角定位故障管。在突然加载、卸载、加速等动态过程中,电流幅值发生突变,又由于该方法是在一个电流周期内求取平均值,会出现Park 矢量模较大的情况,从而出现误诊断,所以阈值选择至关重要。为了解决此问题,文献[25]提出了归一化Park 矢量法,核心思想是根据负载大小,对电流进行归一化,避免在动态过程中误诊断的发生。
1.2 开关管开路故障的容错控制
开关管开路故障后,该开关管处于断开状态,在正确的故障诊断及定位后,一般可以采用冗余和容错两种方法继续运行。
开关管的冗余多应用于高可靠性的驱动系统中,在某个开关管故障后,将冗余的开关管投入使用。文献[26]以一个开关管的成本为单位,对冗余系统的成本进行了折算,并以冗余系统的成本和故障后所输出的功率为依据,定义了冗余系统的价值因数FM(Factor of Merit)为

式中:PFPF(Post-Fault Performance Factor)为故障后的性能因数;CF(Cost Factor)为成本因数。

图1为冗余桥臂拓扑,其桥臂有4 相,其中3 相连接在电动机端,第4 相连接在电动机的中性点。每一相含两个开关管和一个快速熔丝,快速熔丝用于桥臂直通故障时的隔离保护。每一相桥臂与电动机之间通过继电器相连接。无故障时,电动机中性点相的继电器断开,此相没有被激活。当某相开关管故障时,该相的继电器断开,同时电动机中性点相继电器接通,实现容错控制。此拓扑在故障后可以输出66.7%额定功率,FM 为0.36。
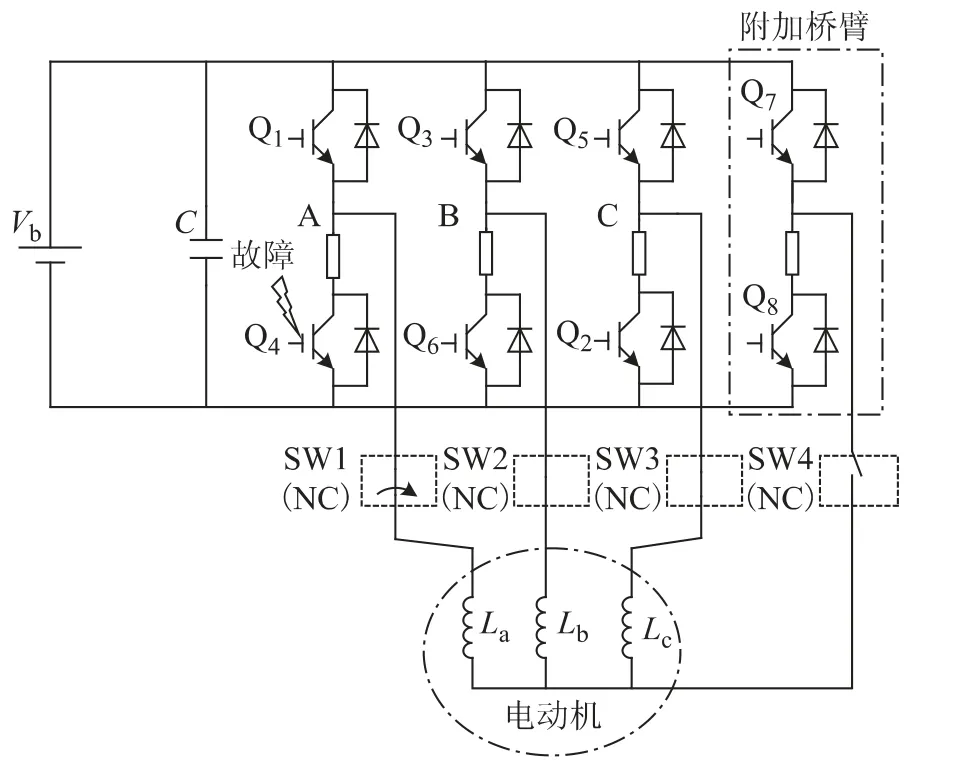
图1 含中性点桥臂的冗余拓扑Fig.1 Redundancy topology with neutral leg
图2为另一种冗余桥臂拓扑,仍有4 相桥臂,每相桥臂的上管和下管之间通过快速熔丝相连,快速熔丝起到在短路故障后隔离故障点的作用。电动机每相均与单刀双掷继电器的一端相连,继电器的另一端统一与冗余桥臂中点相连。这样,在无开关管故障时,冗余桥臂不起作用。在某开关管故障后,相应单刀双掷开关切换到冗余相,达到容错控制的目的。可以看出,此拓扑的优点在于无需电动机的中性点,而且在故障之后可以获得和故障之前同样的输出功率和性能指标。此拓扑的FM 为0.57。
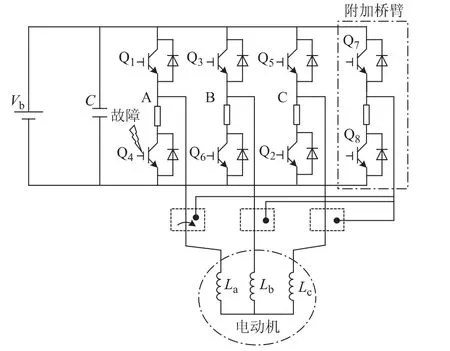
图2 含附加桥臂的冗余拓扑Fig.2 Redundancy topology with additional leg
1.2.2 基于调制策略的开关管故障容错控制
当变频器发生IGBT 开路故障时,封锁故障管及同桥臂开关管的控制信号,将故障桥臂隔离,然后通过继电器将直流母线电容中点与相应电动机相相连,相当于用直流母线电容作为虚拟桥臂,形成三相四开关的逆变器(Three Phases Four Switches Inverver,TPFSI)结构形式,如图3所示。这种拓扑的硬件成本增加很少,故障后逆变器从原先的6 个可控器件变成只有4 个可控器件的结构。三相四开关的逆变器既可以作为六开关逆变器的一种容错控制方式,又可作为低成本逆变器独立应用,有如下特点:①减少了开关管和续流二极管的数量,成本低;②减少了开关管的驱动电路和隔离电源数量;③减少了开关管的损耗;④直流母线电压利用率低,如保持相同功率输出,需提升器件的额定电流;⑤相电流流过直流母线电容,电压波动大。
六开关逆变器具有8 种开关状态,形成6 个基本电压矢量和2 个零矢量。为提高电压利用率、减小输出电流谐波,常采用磁链轨迹跟踪的电压空间矢量控制技术对其进行控制。然而,在四开关逆变器中只有4 个长度不等的开关矢量,且没有零矢量,如图4和表1 所示。所以三相四开关逆变器的PWM 控制策略与传动典型的六开关SVPWM 不同,适合TPFSI 的SVPWM 控制策略成为容错控制的关键。

图3 三相四开关逆变器Fig.3 Three phase four switches inverter
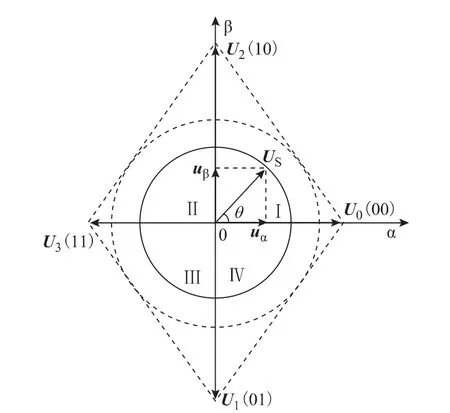
图4 四开关逆变器的电压矢量Fig.4 Voltage vectors of the four-switch inverter
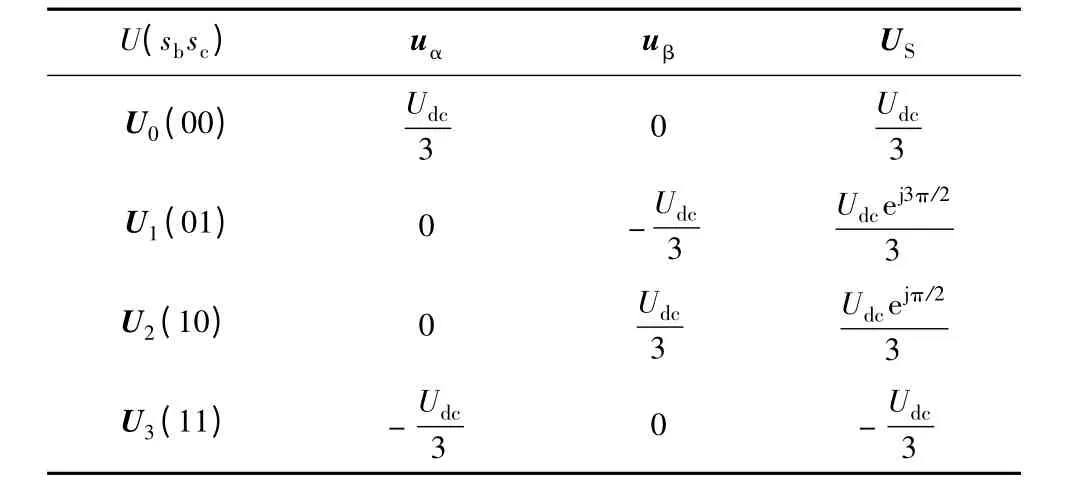
表1 四开关逆变器的电压矢量Tab.1 Voltage vectors of the four-switch inverter
文献[27]在深入分析四开关逆变器运行原理的基础上,研究了空间矢量控制方法,揭示了四开关逆变器SVPWM 控制的本质与SPWM 控制的联系,即四开关逆变器SVPWM 的实质是以两路相位相差π/3 电角度的正弦波为隐含调制函数的正弦脉宽调制,提出了四开关SVPWM“七段式”实现方式。
三相四开关逆变器与六开关逆变器相比,除调制方式不同以外,还存在电压利用率低、直流母线电容电压波动及偏移的问题。其输出电压为六开关逆变器的一半,降低了输出功率和输出转矩,且由于直流母线电压波动,输出转矩随之波动,电流谐波增加,系统响应变差。针对这些方面的问题,学者们展开了过调制以及直流母线电容电压平衡控制的研究。
狠抓教风学风建设,促使学生全面成长成才。在高校强调教学改革、加强学风建设的同时,要突显生态化特征,形成课程体系多样、教学手段丰富、学科争相竞放、思维方式多维度的绿色教学改革格局,培育和营造勤学务实、敬业创新、积极向上的教学求学氛围,这对学生的影响将是持续终生的。
文献[28]提出了一种应用于六开关逆变器的特殊的调制方法,用于补偿直流母线电压的波动。由于四开关逆变器直流母线电压的波动更为剧烈,文献进一步分析其成因,并提出了补偿方法。文献[29]分析了单相交流供电和三相交流供电时直流母线电压的谐波构成,提出了一种适应性的SVM 方法,该方法通过采集直流母线电压信息,自适应地调整开关管的占空比,可以降低直流母线电容的容量和体积,并通过仿真和试验验证了方法的可行性。四开关逆变器工作在低频时,直流母线电压的均衡更加具有挑战性,文献[30]从源阻抗的视角出发,认为导致输出电压和输出电流不均衡的原因在于两点:①直流母线电容的导通阻抗远大于IGBT 的导通阻抗;②相电流流过直流母线电容造成了电压波动。最终推导出电压误差,并据此提出了改进方法。文献[31,32]提出了一种非对称的PWM 调制方法,分析了四开关方式造成的谐波损失和转矩波动。文献[33,34]应用了倍压整流电路,实现单位进线端功率因数并可实现能量双向流动。文献[35]根据直流母线两电容电压差值进行直流母线电容电压的均衡控制。
2 电流传感器故障诊断与容错控制
2.1 电流传感器故障诊断
矢量控制系统中,需要电流信息和速度信息来完成双闭环控制。由于电流冲击、误操作等问题容易导致电流传感器故障而使系统崩溃,所以电流传感器故障诊断和容错控制受到了广大学者的关注。近几十年来,国内外专家学者就传感器故障诊断提出了许多方法,主要可以分成两大类[36]:硬件冗余方法与解析冗余方法。硬件冗余法使用多个完全相同的组件并采用相同的输入信号,利用这些组件的输出进行对比,通过一些特定方法(限制检验、多数表决等)完成诊断决策。这种方法显然增加了设计成本。相比较而言,随着现代控制理论逐渐成熟,解析冗余方法已经成为了故障诊断研究的主流。解析冗余方法又可以分为基于模型、信号、知识几个方面。
2.1.1 基于模型诊断方法[37-45]
基于模型的诊断方法主要是利用电动机的数学模型来诊断故障。观测器在该类方法中扮演着重要的角色,其基本思想是利用观测器观测出的信息与实际测得的信息作比较来判定电流传感器是否故障。文献[37]利用全阶自适应观测器来产生一个残差,根据残差和给定的阈值判断电流传感器故障。文献[38]提出了使用3 个龙贝格观测器实现电流传感器的故障诊断。其控制框图如图5所示。众所周知,三相电流的和为零,因此只要利用两相电流信息就可以求得第三相电流。该方法应用了3 个内部结构完全相同的龙贝格观测器,但其输入电流不同。如电流观测器1 利用的电流信息为ib和ic,而观测器2 利用ia和ic,观测器3 利用ia和ib,观测器的输出定义为

式中j=1,2,3。
输出变量为

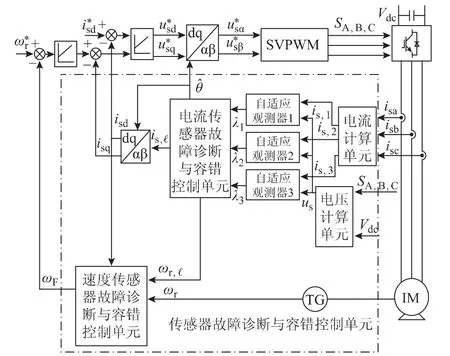
图5 基于观测器的电流传感器故障诊断Fig.5 Current sensor diagnosis based on observer
由此可以看出,当a 相电流传感器故障时,由于观测器1 中没有利用a 相电流信息,所以E1仍趋近于零,而E2、E3会有很大变化。根据三者之间的关系,设定合适的阈值,便可以定位故障的电流传感器。该文献详细介绍了变频器的电流传感器故障诊断方法和诊断原理,并且给出了相应的容错控制方法,但是此方法只能诊断出一个电流传感器故障的情况,不适用于两个电流传感器同时故障的情况。
文献[13]中提出了一种可以在线辨识转子电阻的全阶自适应状态观测器方法。该方法利用转子电阻在线参数辨识使得观测器更为精确,其诊断机理同样是利用变量的残差值。该方法定义了诊断变量指标为

由此可以得到诊断机理:当无电流传感器故障时,三相诊断变量指标均趋近于零。反之,当诊断变量指标不趋近于零,可以根据变化大小来定位电流传感器故障。该方法优点在于它不仅可以诊断电流传感器故障,而且也可以诊断电压传感器与速度传感器故障。但是该方法对随机系统噪声的鲁棒性较差,且没有就闭环控制策略进行详细介绍。文献[40]提出了利用扩展卡尔曼滤波器方法来进行电流的估算,其基本思想与上述文献类似,同样是利用残差值来诊断电流传感器故障。
2.1.2 基于信号诊断方法[46-49]
基于信号的诊断方法就是直接利用测量信号的特征来进行故障诊断。在传感器故障过程中,故障的信息可以通过已测的信号表示出来,然后根据这些故障特征和关于正常系统的相应特征的先验知识便可以给出故障的定位与辨识。
文献[47]提出了一种简单有效的电流传感器故障诊断方法,其基本思想是根据电流传感器故障后的特征进行故障诊断。该方法仅需要已测得的相电流,而且由于它较为简洁的计算过程,很适合应用于实时故障诊断。为了使该诊断方法不受加减负载和负载瞬变的影响,文献[47]对相电流进行了归一化,归一化后的相电流为

式中n=a,b,c。文献[47]定义诊断变量为

正常工作的情况下,d 趋近于零。当有电流传感器发生故障时,d 将为一个较大的值,此时判断有电流传感器发生故障。同时,文献还提出了故障定位变量

当无故障时,各相的故障定位变量都将趋近一个固定值。而在某相电流传感器故障后,这个值会与其他两相显著不同,从而定位故障。文献[48]提出了利用相电流坐标变换的方法来诊断故障。众所周知,可以通过Clarke 变换将ab 相电流转换到静止坐标系下
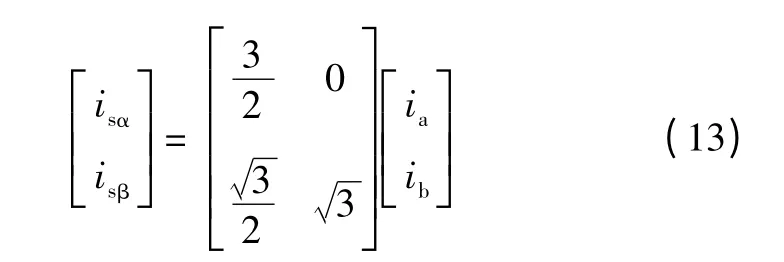
如果a 相电流传感器故障,得到的αβ 轴电流都将是错误的,但如果b 相电流传感器故障,那么α 相电流是正确的,而β 相是错误的,据此可完成电流传感器的故障诊断。重要的是如何找到正确的αβ 轴电流来进行比较。该文献通过给定的同步旋转坐标系下的dq 轴电流进行park 反变换得到正确的αβ 轴电流,完成与实际αβ 轴电流的对比。
2.1.3 基于知识的故障诊断方法[49-55]
基于知识的故障诊断方法不同于基于模型和基于信号的诊断方法,它不仅需要实时的数据,同时还需要大量的历史数据。例如专家系统方法、模糊控制方法等都属于基于知识的诊断方法。该类方法在故障诊断方面的应用很多[55]。文献[49-51]介绍了如何利用神经网络和模糊控制技术实现电流传感器的故障诊断、定位和隔离。文献[50]介绍了一种人工神经网络,并且通过相电压、相电流、转子转速、电动机的转矩和功率以及直流母线电压来训练人工神经网络,但是这种方法实现较为困难,并且很难应用于实际的控制系统。文献[51]提出使用模糊控制实现电流传感器的故障诊断。其方法是根据大量实验建立隶属度矩阵,根据测试得到诊断对象的特征参数,再根据特定的判断原则得到诊断结果。文献[52,53]基于传感器故障情况设计了一种选择器用于改变控制策略。文献[54]介绍了一种模糊算法的决定器,用于在传感器发生故障时切换到容错控制状态。
混合型诊断方法是将以上方法结合到一起进行故障诊断。文献[56]提出了一种将模型法与信号法相结合的方式来进行电流传感器故障诊断,用基于信号的方法代替一部分基于模型的方法可以减少整个诊断过程的计算量。除此之外,该方法还可以用于诊断开关管开路故障。
2.2 电流传感器容错控制
变频器电流传感器的容错控制有两种方法。一种方法是当检测到电流传感器故障后,系统切换到另一种控制模式,一般是从依赖于传感器的闭环矢量控制切换到不依赖于传感器的开环控制。另一种方法是用观测器重构出电流信号代替电流传感器信号,从而使闭环矢量控制继续进行。第一种方法简单,但是开环控制性能较闭环矢量控制性能差,较大程度上降低了系统的性能指标;第二种方法需要设计电流观测器,容错控制后的闭环矢量控制性能的好坏取决于电流观测器的性能,所以电流传感器容错控制的研究重点之一就是如何设计出观测准确的电流观测器[56-58]。归纳总结国内外的文献所提出的电流传感器容错控制方法,其主要思想都是利用算法来估算出丢失的电流信息。
2.2.1 基于状态观测器的容错控制方法
基于观测器的电流传感器容错控制方法,就是通过观测器合理设计,观测到相对准确的相电流,当故障发生后,用状态观测器观测的电流信息代替原有传感器信号实现闭环控制。变频器中,一般有两个相电流传感器,所以容错控制应考虑单个相电流传感器的情况。文献[59]中提出了一种电流传感器容错控制方法,同时可以在线辨识转子电阻和定子电阻。该方法根据电动机的状态方程,基于龙贝格观测器理论设计了一种电流观测器。该观测器的输入包括相电压以及单相电流(即可测相电流),输出包括定子电流与转子磁链。同时,文中假设可测相电流定位在α 轴方向、电流误差只存在于α 轴电流。通过李雅普诺夫稳定性判据得到了增益矩阵的表达方式。该思想对于研究电流传感器容错控制具有很重要的意义。但由于其忽略了β 轴应有的电流误差,使得该控制方式在高速情况下效果不是很理想,甚至有可能发散导致系统发散。
2.2.2 基于坐标变换的容错控制方法
坐标变换方法就是利用坐标变换来构造出丢失的相电流信息。文献[60]将可测相电流定义为α 轴方向,利用park 反变换得到了β 轴电流。由于转换需要给定的dq 轴电流信息,而给定的q 轴电流又要通过转速闭环得到,因此该方法的动态性能效果不是很理想。文献[48]同样提出了利用坐标变换的方法来实现容错控制。该文献通过坐标转换得到αβ 轴电流,且与计算的电流作比较来完成故障诊断。在诊断出故障后,利用实际计算的电流代替故障相电流完成闭环控制,方法具有较高的可行性。
2.2.3 直流母线电流采样法[61,62]
该方法利用串联在直流母线上的采样电阻得到直流母线电流,然后利用逆变器的开关状态重构三相电流。当变频器施加非零矢量时,直流母线电流会反映某一相电流的信息。由于空间矢量脉宽调制方法是将相邻的两个非零电压矢量在一个采样周期内进行合成来得到目标电压矢量,所以在一个开关周期内直流母线电流采样可以得到两相电流信息。但是由于采样需要时间,所以调制法会存在一定的测量盲区,如何消除测量盲区,同时尽可能保持SVPWM 原状,是调制法的难点。文献[62]采用PWM 波移相的方法,把占空比最大和最小的对应相的PWM 波进行前后平移,以留有足够的采样时间。该类电流传感器容错控制方法需要在直流母线安装电流传感器,这会增加变频器的成本。同时,直流母线电流采样法得到的重构电流往往含有较大的噪声。因此该方法一般多用于小功率场合。
3 速度传感器故障诊断与容错控制
3.1 速度传感器故障诊断
由于速度传感器是电动机矢量控制中脆弱的一环,当速度传感器发生故障后,常常会导致系统崩溃,损坏设备,甚至对于操作者的人身安全产生威胁。因此,对于速度传感器进行实时监测、故障诊断和容错控制是十分必要的。速度传感器故障诊断方法主要可分为硬件方法和软件方法两大类。
3.1.1 硬件诊断方法[63,64]
硬件诊断方法就是利用硬件电路实现速度传感器的故障诊断,从而及时地进行故障隔离,采取补救措施。文献[63]中提出了一种用硬件电路检测光电码盘故障的方法,在编码器信号线A、B、Z 任意一根断路时,硬件电路会作出故障指示。但是这种故障诊断的电路依赖于速度传感器输出接口类型,该硬件检测方法只适用于电压输出类型的光电编码器。除此外在速度传感器发生内部损坏时,信号线并没有断线,但输出脉冲仍然不正确,此时上述硬件法已经无能为力。文献[64]提出了一种基于时序电路的脉冲诊断方法,不依赖于速度传感器输出接口类型,有效解决了文献[63]中方法的不足。
3.1.2 状态观测器方法
文献[65]提出了一种基于全阶状态观测器的方法来实现速度传感器故障诊断。该方法利用改进龙贝格观测器来获得定子电流误差E,同时通过判断误差E是否超过了设定的阈值判断速度传感器是否发生故障,其中残差信号E 表示为

正常运行状态下观测得到定子电流最终收敛于实际的电流值,所以残差信号E 趋近于零,一旦速度传感器发生故障,破坏了观测器的结构,导致观测的电流严重偏离实际电动机电流值,使得残差E 超过给定的阈值,发出故障信号。该方法利用状态观测器进行故障诊断,更有利于进行容错控制。文献[40,66,67]提出利用扩展卡尔曼滤波器(EKF)的方法观测转速或电流误差来进行速度传感器故障诊断。文献[40]通过EKF 方法得到转速的估计值与实际转速作差定义诊断变量。当速度传感器发生故障时,诊断变量会超过阈值而发出故障信息。但是该方法对于低速运行状态容易发生误诊断,方法上还有待提高。
3.1.3 智能算法[68,69]
常用的智能算法包括人工神经网络、模糊控制以及小波变换方法。文献[68]利用模糊控制理论进行速度传感器故障诊断。该方法通过足够多的历史数据进行隶属度设计,不断地整合新数据,并基于实时测得的数据完成故障诊断。同时,该方法还可以通过电动机状态的特征区别故障是由速度传感器故障还是参数变化所引起。文献[69]提出了一种通过人工神经网络方法完成速度传感器的诊断。该方法多用于数据比较复杂的场合,如地铁列车等,较少应用于变频器的速度传感器故障诊断。由于需要大量的数据与计算,所以在实际应用中实现较为困难。
3.2 速度传感器容错控制
因为无速度传感器技术已经比较成熟,所以速度传感器故障的容错控制一般是在速度传感器故障后,将有速度传感器矢量控制方法平滑切换到无速度传感器矢量控制。近年来,无速度传感器矢量控制方法主要有直接计算法、模型参考自适应法、状态观测器法和滑模观测器法等。
3.2.1 直接计算法
直接计算法就是利用同步角速度与转差角速度相减得到转子角速度。转差角频率的计算根据磁场定向方式的不同而有所区别。该方法的优点是计算直观,转速估算几乎没有延时。但是磁链观测的准确性直接影响转速估算准确度,并且严重依赖于电动机参数,抗干扰能力差。针对这些缺点,各国学者提出了相应的改进方法[70,71],主要利用改进的电动机磁链观测技术,电动机参数的在线辨识、非线性补偿及误差量的校正和补偿等。
3.2.2 模型参考自适应法
模型参考自适应法[72-74](MRAS)的主要思想是将不含未知参数的方程作为参考模型,将含有待估计参数的方程作为可调模型,两个模型具有相同物理意义的输出量,利用两个模型输出量的误差构成合适的自适应律,实时调节可调模型的待定参数,以达到可调模型的输出跟踪参考模型输出的目的。
依据模型输出量的不同,MRAS 又可分为基于转子磁链的MRAS、基于反电势的MRAS 和基于无功功率的MRAS。传统MRAS 方法中由于电动机参数变化、纯积分器和直流温漂等问题,使得该方法在低速时估算的效果不理想。文献[72]提出了一种改进的MRAS法以克服该缺点。该方法增加了一个电磁转矩误差的控制环,以保证在电动机在低速运行时,负载突变等原因导致转速变化之后,电磁转矩误差与估计磁链误差均趋近于零,这样转速就趋近于实际转速。文献[74]提出利用无功功率作为可调模型,避免了定子电阻的影响,改善了观测器的低速观测性能。文献[75]介绍了多种参考模型选取方法,包括反电动势法和无功功率法等,并且给出了基于不同参考模型的观测转子转速和在线估计的转子电阻的实验对比波形。
3.2.3 状态观测器方法
状态观测器是模型参考自适应的一种特殊形式。观测器方法将电动机自身作为参考模型,以状态观测器作为可调模型。该方法的优点在于回避了纯积分问题,保证了参考模型的准确性,降低了对电动机参数的敏感性。文献[65]提出了一种基于全阶状态观测器的容错控制方法。该方法利用全阶状态观测器辨识转速,同时利用反馈矩阵的设计提高转速估计的准确度。该方法还采用数据融合的思想使得在速度传感器正常运行时,将状态观测接入闭环控制,只是占有较小的一部分,当发生故障后将实际转速全部由估计转速替代,可保证在诊断出故障后快速实现闭环并正常工作。状态观测器方法设计过程中最重要的是反馈矩阵的设计,文献[75]对目前自适应全阶观测器反馈矩阵的设计方法做出了比较详细的分析总结,在此基础上提出了一种新型的反馈矩阵设计思路。
3.2.4 滑模观测器方法
从组成结构来看,滑模控制结构和模型参考自适应控制结构也非常相似,其不同之处在于模型参考自适应法的自适应率一般为PI 控制器,而滑模控制器的自适应率是滑模控制器。滑模观测器最主要的优点是鲁棒性强,结构简单,对系统参数准确度要求低,这些特点非常适合对电动机系统的研究。文献[76]对无速度传感器矢量控制的模型参考自适应法和滑模观测器法进行了详细的比较,发现两种方法都比较简单易行,但是滑模观测器法的动态响应更快,对电动机参数的鲁棒性更强。文献[77]提出一种新型的滑模控制器,即固定边界层滑模控制器(Fixed-Boundary-Layer Sliding Mode,FBLSM),这种观测器不需要电压信息就能观测速度,并且在不需要知道转矩信息的情况下就能准确地观测出转子转速和转子磁链。滑模观测器中固有的离散开关控制,将不可避免地导致抖振现象,虽然抖振现象不能彻底消除,但是可以采用一定的方法对其进行抑制。
4 结论
随着工业界对变频器的可靠性和安全性的重视程度不断提高以及控制理论突飞猛进的发展,变频器的故障诊断和容错控制技术也逐渐成熟。从成本和适应性方面考虑,故障诊断和容错控制技术已经从基于硬件、信号的诊断发展为基于模型、知识的诊断;从基于冗余的容错发展为基于控制策略、算法的容错。故障诊断和容错控制往往在方法上融为一体,密不可分,其方法必将推广到永磁同步电动机系统、伺服系统和风电等领域。传感器及处理电路的软故障诊断及预测(如增益变化、间歇断线等)必将是未来的发展方向。
[1] 孙丰涛,张承慧,崔纳新,等.变频器故障诊断技术研究与分析[J].电机与控制学报,2005,9(3):272-274.
Sun Fengtao,Zhang Chenghui,Cui Naxin,et al.Advances and prospect of fault diagnosis technology in frequency converter[J].Electric Machines and Control,2005,9(3):272-274.
[2] 周东华,Ding X.容错控制理论及其应用[J].自动化学报,2000,26(6):788-797.
Zhou Donghua,Ding X.Theory and applications of fault tolerant control[J].Acta Automatica Sinica,2000,26(6):788-797.
[3] Nandi S.Detection of stator faults in induction machines using residual saturation harmonics[J].IEEE Transactions on Industry Applications,2006,42(5):1201-1208.
[4] Siddique A,Yadava G S,Singh B.A review of stator fault monitoring techniques of induction motors[J].IEEE Transactions on Energy Conversion,2005,20(1):106-114.
[5] Sizov G Y,Sayed-Ahmed A,Yeh C C,et al.Analysis and diagnostics of adjacent and nonadjacent broken-rotorbar faults in squirrel-cage induction machines[J].IEEETransactions on Industrial Electronics,2009,56(11):4627-4641.
[6] Bossio G R,De Angelo C H,Garcia G O,et al.Effects of rotor bar and end-ring faults over the signal sofa position estimation strategy for induction motors[J].IEEE Transactions on Industry Applications,2005,41(4):1005-1012.
[7] Li Shengming,Xu L.Strategies of fault to lerant operation for three-level PWM inverters[J].IEEE Transactions on Power Electronics,2006,21(4):933-940.
[8] Ma Hao,Wang Linguo.Fault diagnosis and failure prediction of aluminum electrolytic capacitors in power electronic converters[C].31st Annual Conference of IEEE Industrial Electronics Society(IECON),Raleigh,NC,2005:842-847.
[9] Immovilli F,Bellini A,Rubini R,et al.Diagnosis of bearing faults in induction machines by vibration or current signals:a critical comparison[J].IEEE Transactions on Industry Applications,2010,46(4):1350-1359.
[10] Ibrahim A,Badaoui M E,Guillet F,et al.A new bearing fault detection method in induction machines based on instantaneous power factor[J].IEEE Transactions on Industrial Electronics,2008,55(12):4252-4259.
[11] Nandi S,Ilamparithi T C,Lee S B,et al.Detection of eccentricity faults in induction machines based on nameplate parameters[J].IEEE Transactions on Industrial Electronics,2011,58(5):1673-1683.
[12] Blodt M,Regnier J,Faucher J.Distinguishing load torque oscillations and eccentricity faultsin induction motors using stator current wigner distributions[J].IEEE Transactions on Industry Applications,2009,45(6):1991-2000.
[13] Najafabadi T A,Salmasi F R,Jabehdar-Maralani P.Detection and isolation of speed-,DC-link voltage-,and current-sensor faults based on an adaptive observer in induction-motor drives[J].IEEE Transactions on Industrial Electronics,2011,58(5):1662-1672.
[14] Masrur M A,Chen Zhihang,Zhang Baifang,et al.Model-based fault diagnosis in electric drive inverters using artificial neural network[C].Power Engineering Society General Meeting,Tampa,FL,2007:1-7.
[15] Debebe K,Rajagopalan V,Sankar T S.Expert systems for fault diagnosis of VSI fed AC drives[C].Industry Applications Society Annual Meeting,Dearborn,MI,1991:368-373.
[16] Jang-Hwan P,Dong-Hwa K,Sung-Suk K,et al.CANFIS based fault diagnosis for voltage-fed PWM motor drive system[C].Annual Conference of the North American Fuzzy Information Processing Society,Banff,Alta,Canada,2004:379-383.
[17] Ribeiro R L A,Jacobina C B,Silva E R C D.Fault detection of open-switch damage in voltage fed PWM motor drive systems[J].IEEE Transactions on Power Electronics,2003,18(2):587-593.
[18] Mamat M R,Rizon M,Khanniche M S,Fault detection of 3-phase VSI using wavelet-fuzzy algorithm[J].American Journal of Applied Sciences,2006:1642-1648.
[19] Charfi F,Sellami F,Al-Haddad K.Fault diagnosis in powersystem using wavelet transforms and neural networks[C].2006 IEEE International Symposium on Industrial Electronics,Montreal,Que,2006:1143-1148.
[20] Masrur M A,Chen Z,Zhang B,et al.Model-based faultdiagnosis in electric drive inverters using artificial neural network[C].2007 IEEE Power Engineering Society General Meeting,Tampa,FL,2007:1-7.
[21] Mendes A M S,Cardoso A J M,Saraiva E S.Voltage source inverter fault diagnosis in variable speed AC drives,by the average current Park’s vector approach[C].Proceedings of the Seventh International Conference on Power Electronics and Variable Speed Drives,London,1998:538-543.
[22] Caseiro J A A,Cardoso A J M.Fault diagnosis on a PWM rectifier AC drive system with fault tolerance using the average current Park’s vector approach[C].IEEE International Electric Machines and Drives Conference,Miami,FL,2009:695-701.
[23] Blaabjerg F,Pedersen J K,Jaeger U,et al.Single current sensor technique in the DC link of three-phase PWM-VS inverters:a review and a novel solution[J].IEEE Transactions on Industry Applications,1997,33(5):1241-1253.
[24] Peuge R,Courtine S,Rognon J P.Fault detection and isolation on a PWM inverter by knowlege-based model[J].IEEE Transactions on Industry Applications,1998,34(6):1318-1325.
[25] 于泳,蒋生成,杨荣峰,等.变频器IGBT 开路故障诊断方法[J].中国电机工程学报,2011,31(9):30-35.
Yu Yong,Jiang Shengcheng,Yang Rongfeng,et al.IGBT open circuit fault diagnosis method for inverter[J].Proceedings of the CSEE,2011,31(9):30-35.
[26] Naidu M,Gopalakrishnan S,Nehl T.Fault tolerantpermanent magnet motor drive topologies for automotive X-By-Wire systems[J].IEEE Transactions on Industry Applications,2010,46(2):841-848.
[27] 安群涛,孙醒涛,赵克,等.容错三相四开关逆变器控制策略[J].中国电机工程学报,2010,30(3):14-19.
An Quntao,Sun Xingtao,Zhao Ke,et al.Control strategy for fault-tolerant three-phase four-switch inverters[J].Proceedings of the CSEE,2010,30(3):14-19.
[28] Enjeti P,Shireen W.A new technique to reject DC-link voltage ripple for inverters operating on programmed PWM waveforms[J].IEEE Transactions on Power Electronics,1992(7):171-179.
[29] Frede B,Neacsu D,John K P.Adaptive SVM to compensate DC-Link voltage ripple for four-switch threephase voltage-source inverters[J].IEEE Transactions on Power Electronics,1999,14(4):743-752.
[30] Kim J,Hong J,Nam K.A current distortion compensation scheme for four-switch inverters[J].IEEE Transactions on Power Electronics,2009,24(3-4):1032-1040.
[31] van der B H W,Van Wyk J D.A comparative investigation of a three-phase induction machine drive with a component minimized voltage-fed inverter under different control options[J].IEEE Transactions on Industry Applications,1984,IA-20(2):309-320.
[32] van der B H W,Skudelny H C.Analytical analysis of the harmonic effects of a PWM AC drive[J].IEEE Transactions on Power Electronics,1988,3(2):216-223.
[33] Enjeti P N,Rahman A.A new single-phase to threephase converter with active input current shaping for low cost AC motor drives[J].IEEE Transactions on Industry Applications,1993,29(4):806-813.
[34] Enjeti P N,Rahman A,Jakkli R.Economic single phase to three-phase converter topologies for fixed and variable frequency output[J].IEEE Transactions on Power Electronics,1993,8(3):329-335.
[35] Beltrao de R C M,Jacobina C B,Cabral da S E R,et al.A general PWM strategy for four-switch three-phase inverters[J].IEEE Transactions on Power Electronics,2006,21(6):1618-1627.
[36] Gao Z,Cecati C,Ding S X.A survey of fault diagnosis and fault-tolerant techniques-part Ⅰ:fault diagnosis with model-based and signal-based approaches[J].IEEE Transactions on Industrial Electronics,2015,62(6):3757-3767.
[37] Lee K S,Ryu J S.Instrument fault detection and compensation scheme for direct torque controlled induction motor drives[J].IEE Proceedings of Control Theory and Applications,2003,150(4):376-382.
[38] Yu Yong,Wang Ziyuan,Xu Dianguo.Speed and current sensors fault detection and isolation based on adaptive observers for induction motor drivers[J].Journal of Power Electronics,2014,14(5):967-979.
[39] Heredia G,Ollero A,Mahtani R,et al.Detection of sensor faults in autonomous helicopters[C].Proceedings of the IEEE International Conference on Robotics and Automation,Icra,2005:2229-2234.
[40] Zhang Xinan,Foo G,Don V M,et al.Sensor fault detection,isolation and system reconfiguration based on extended Kalman filter for induction motor drives[J].IET Electric Power Applications,2013,7(7):607-617.
[41] Youssef A B,El-Khil S K,Slama-Belkhodja I.State observer-based sensor fault detection and isolation,and fault tolerant control of a single-phase PWM rectifier for electric railway traction[J].IEEE Transactions on Power Electronics,2013,28(12):5842-5853.
[42] Rothenhagen K,Fuchs F W.Current sensor fault detection,isolation,and reconfiguration for doubly fed induction generators[J].IEEE Transactions on Industrial Electronics,2009,56(10):4239-4245.
[43] Bachir S,Tnani S,Trigeassou J C,et al.Diagnosis by parameter estimation of stator and rotor faults occurring in induction machines[J].IEEE Transactions on Industrial Electronics,2006,53(3):963-973.
[44] Freire N M,Estima J O,Cardoso A J M.A new approach for current sensor fault diagnosis in PMSG drives for wind energy conversion systems[J].IEEE Transactions on Industridl Applications,2014,50(2):1206-1214.
[45] Chong U P.Signal model-based fault detection and diagnosis for induction motors using features of vibration signal in two-dimension domain[J].Strojniški Vestnik-Journal of Mechanical Engineering,2011,57(9):655-666.
[46] Shahriar M R,Ahsan T,Chong U P.Fault diagnosis of induction motors utilizing local binary pattern-based texture analysis[J].EURASIP Journal on Image and Video Processing,2013,2013(1):1-11.
[47] Freire N M,Estima J O,Cardoso A J M.A new approach for current sensor fault diagnosis in PMSG drives for wind energy conversion systems[J].IEEE Transactions on Industry Applications,2014,50(2):1206-1214.
[48] Chakraborty C,Verma V.Speed and current sensor fault detection and isolation technique for induction motor drive using axes transformation[J].IEEE Transactions on Industrial Electronics,2015,62(3):1943-1954.
[49] Bernieri A,Betta G,Pietrosanto A,et al.A neural network approach to instrument fault detection and isolation[J].IEEE Transactions on Instrument and Measurement,1995,44(3):747-750.
[50] Betta G,Liguori C,Pietrosanto A.An advanced neural-network based instrument fault detection and isolation scheme[J].IEEE Transactions on Instrument and Measurement,1998,47(2):507-512.
[51] Li H,Monti A,Ponci F.A fuzzy-based sensor validation strategy for AC motor driver[J].IEEE Transactions on Industry Informatics,2012,8(4):839-848.
[52] Raisemche A,Boukhnifer M,Larouci C,et al.Two active fault tolerant control schemes of induction motor drive in EV or HEV[J].IEEE Transactions on Vehicular Technology,2014,63(1):19-29.
[53] Shi X,Krishnamurthy M.Survivable operation of induction machine drives with smooth transition strategy for EV application[J].IEEE Journal of Emerging and Selected Topics on Power Electronics,2014,2(3):609-617.
[54] Benbouzid M E H,Diallo D,Zeraoulia M.Advanced Fault-Tolerant control of induction motor drives for EV/HEV traction application:from conventional to modern and intelligent control techniques[J].IEEE Transactions on Vehicular Technology,2007,56(2):519-528.
[55] 朱大奇,于盛林.基于知识的故障诊断方法综述[J].安徽工业大学学报:自然科学版,2002,19(3):197-204.
Zhu Daqi,Yu Shenglin.Survey of knowledge-based fault diagnosis methods[J].Journal of Anhui University of Technology,2012,19(3):197-204.
[56] Mollet Y,Gyselinck J,Meinguet F.Current sensor fault detection and isolation combining model-based and signal-based algorithms in PMSG drives[C].2013 15th European Conference on Power Electronics and Applications,Lille,2013:1-10.
[57] Grouz F,Sbita L,Boussak M.Current sensor fault detection,isolation and control reconfiguration for PMSM drives[C].2013 International Conference on Electrical Engineering and Software Applications,Hammamet,2013:1-6.
[58] Kai R,Friedrich W F.Doubly fed induction generator model-based sensor fault detection and control loop reconfiguration[J].IEEE Transactions on Industrial Electronics,2009,56(10):4229-4238.
[59] Salmasi F R,Najafabadi T A.An adaptive observer with online rotor and stator resistance estimation for induction motors with one phase current sensor[J].IEEE Transactions on Energy Conversion,2011,26(3):959-966.
[60] Verma V,Chakraborty C,Maiti S,et al.Speed sensorless vector controlled induction motor drive using single current sensor[J].IEEE Transactions on Energy Conversion,2013,28(4):938-950.
[61] Vukosavic S N,Stankovic A M.Sensorless induction motor drive with a single DC-link current sensor and instantaneous active and reactive power feedback[J].IEEE Transactions on Industrial Electronics,2001,48(1):195-204.
[62] 陈小波,胡育文,黄文新,等.基于单电阻电流采样的矢量控制算法研究[J].电气传动,2011,41(5):15-19.
Chen Xiaobo,Hu Yuwen,Huang Wenxin,et al.Research on vector control based on single shunt current sensing[J].Electric Drive,2011,41(5):15-19.
[63] 富历新.一种光电码盘输出线断路检测和保护电路[J].微电机,1993(3):56-57.
Fu Lixin.A detection and protection circuit for line breakage of encoder[J].Micromotors,1993(3):56-57.
[64] 丛培城.变频器故障诊断及相应控制策略研究[D].哈尔滨:哈尔滨工业大学,2010.
[65] 于泳,蒋生成,王高林,等.基于状态观测器的感应电机速度传感器故障诊断及容错控制[J].中国电机工程学报,2012,32(18):123-130.
Yu Yong,Jiang Shengcheng,Wang Gaolin.Fault diagnosis and tolerant control for speed sensors based on state observers in induction motor drives[J].Proceedings of the CSEE,2012,32(18):123-130.
[66] Danan S,Wenli L,Lijun D,et al.Speed sensorless induction motor drive based on EKF and G-1 model[C].2011 International Conference on Computer Distributed Control and Intelligent Environmental Monitoring,Washington,2011:290-294.
[67] Barut M,Bogosyan S,Gokasan M.Experimental evaluation of braided EKF for sensorless control of induction motors[J].IEEE Transactions on Industrial Electronics,2008,55(2):620-632.
[68] Zidani F,Diallo D,Benbouzid M E H,et al.Diagnosis of speed sensor failure in induction motor drive[C].2007 IEEE International Electric Machines & DrivesConference,Antalya,2007,2:1680-1684.
[69] 宋云,朱明年.基于神经网络的地铁列车速度传感器故障诊断方法[J].城市轨道交通研究,2014,17(5):94-97.
Song Yun,Zhu Mingnian.Fault diagnosis of subway train speed sensors based on neural network[J].Urban Mass Transit,2014,17(5):94-97.
[70] Tsuji M,Chen S,Izumi K,et al.A sensorless vector control system for induction motors using q-axis flux with stator resistance identification[J].IEEE Transactions on Industrial Electronics,2001,48(1):185-194.
[71] Holtz J,Quan J.Drift-and parameter-compensated flux estimator for persistent zero-stator-frequency operation of sensorless-controlled induction motors[J].IEEE Transactions on Industry Applications,2003,39(4):1052-1060.
[72] Benlaloui I,Drid S,Chrifi-Alaoui L,et al.Implementation of a new MRAS speed sensorless vector control of induction machine[J].IEEE Transactions on Energy Conversion,2015,30(2):588-595.
[73] Mini R,Rani S,Dinesh M N.Low speed estimation of DTC controlled induction motor drive using MRAS[C].International Conference on Electronics,Communication and Computational Engineering,Hosur,2014:30-35.
[74] Purushottama R,Jayaram N,Shekar R.Sensorless vector control of induction machine using MRAS techniques[C].2013 International Conference on Circuits,Power and Computing Technologies,Nagercoil,India,2013:167-175.
[75] Sun Wei,Yu Yong,Wang Gaolin,et al.A novel method for adaptive full order observer feedback matrix and speed estimation algorithm[C].Industry Application Society Annual Meeting,Vancouver,Canada,2014:1-7.
[76] Ajabi-Farshbaf R,Azizian M R,Amiri K,et al.A comparative study of speed observers between adaptive and sliding mode approaches[C].PEDSTC 2014 5th Power Electronics,Drive Systems and Technologies Conference,Tehran,Iran,2014:556-561.
[77] Zhang Xi.Sensorless Induction motor drive using indirect vector controller and sliding-mode observer for electric vehicles[J].IEEE Transactions on Vehicular Technology,2013,62(7):3010-3018.
猜你喜欢
科技创新导报(2022年17期)2022-09-22
微电机(2022年1期)2022-03-21
北京航空航天大学学报(2021年9期)2021-11-02
中学生数理化·高一版(2021年11期)2021-09-05
防爆电机(2020年4期)2020-12-14
现代防御技术(2016年1期)2016-06-01
新高考·高一物理(2016年1期)2016-03-05
铁道科学与工程学报(2015年5期)2015-12-24
电测与仪表(2015年19期)2015-04-09
电测与仪表(2014年21期)2014-04-04