
基于距离多结构的末制导雷达目标识别方法研究
2015-06-27 05:50波姜永华李敬军卢
电波科学学报 2015年2期
但 波姜永华李敬军卢 毅
基于距离多结构的末制导雷达目标识别方法研究
但 波1姜永华1李敬军1卢 毅2
(1.海军航空工程学院电子信息工程系,山东烟台264001;2.海军装备部,四川成都610100)
针对目前末制导雷达在目标识别时未充分利用其在搜索阶段获得的高分辨距离像(High Resolution Range Profile,HRRP)序列的情况,提出了基于宽带雷达目标HRRP序列的距离多结构识别方法.该方法首先获取末制导雷达在搜索阶段与目标相对视线变化的HRRP序列,然后通过与不同基本几何体在相应方位角雷达散射截面积变化的趋势按照最大匹配准则获得目标距离多结构,最后判断目标与基本几何体的结构相似性参数概率形式提取识别需要的特征,完成对舰船目标的识别.通过对三种典型编队目标的仿真与外场非编队舰船目标的实测数据表明该方法是有效的.
HRRP序列;距离多结构识别;编队目标
引 言
宽带雷达高分辨距离像(High Resolution Range Profile,HRRP)是利用宽带雷达获取的目标散射点子回波在雷达视线上投影的向量和反映了一定雷达视角时,目标上散射体(尾封板、船体侧壁、直升机停机台、部分上层建筑侧壁、艏部结构、腔体结构等)的雷达散射截面积(Radar Cross Section,RCS)沿雷达视线的分布情况,体现了散射点的相对几何关系,因此,HRRP样本包含目标重要的结构特征,对目标识别与分类具有重要意义[1].
当宽频雷达对特定的目标进行不间断的探测时,每次回波都能形成有效的高分辨距离像,这些距离像按时间进行排列,即形成HRRP序列.目前国内外针对HRRP序列目标识别的研究大多是利用目标的空时信息,借助隐马尔科夫链(Range Multistructure Identification Method,HMM)分类器对多视角下的HRRP样本作联合识别,对多个姿态角下的HRRP序列的识别问题研究较少,且其未能充分利用雷达在搜索阶段可获得的目标大范围角域信息[2-5].
针对上述问题,本文提出了基于宽带雷达目标HRRP序列的距离多结构识别方法(Range Multi-Structure Identification Method,RMIM).相对于传统的利用距离像识别方法,该方法具有以下优点:
1)通过对末制导雷达搜索期间获得的大角域HRRP样本进行联合处理,可获得目标更多信息,增强识别能力;
2)在搜索结束后可根据给出的精确的导引信息实现对目标部位级的精确打击,对高战术价值目标进行精确打击从而可提高反舰导弹的战术效能与效费.
通过对三种典型编队目标的仿真与外场的实测数据表明该方法是有效的.
1 问题描述及基本定义
1.1假 设
在论述对编队目标的识别方法前先做如下假设:
1)目标的距离、方位和速度可通过弹上末制导雷达探测计算获得.
2)舰艇编队的舰艇数量和队形已知,如图1所示.舰艇编队的队形稳定,速度和航向基本一致.
3)末制导雷达在搜索阶段的飞行方向指向如图1所示的编队散布圆圆心(1.3节中定义).
4)末制导雷达在搜索阶段可实现对编队的完全覆盖.
1.2问题描述
反舰导弹发射平台的火控雷达探测到远距离处的一个舰艇编队(如图1所示),图中d为编队相邻舰艇的距离,T1~T5分别代表四种不同类型的舰船(其中五个目标的编队中有两艘舰艇为同型船).通过发射平台的火控系统向导弹装订由火控雷达探测到的编队目标的位置信息.经过导弹自控段飞行后,末制导雷达在t0时刻开机,雷达在其最大搜索区域搜索一遍,录入所有探测到的目标信息.t1时刻为末制导雷达搜索结束时刻,然后利用搜索阶段获取的目标信息完成对目标的识别.

图1 编队队形
1.3基本定义
1.3.1 编队队形散布圆的定义
处于作战状态的舰艇编队通常保持一定的队形,因而每种编队队形都具有一定的散布范围,可用编队队形的最大外接圆所覆盖区域表示编队所在范围,称为“编队队形散布圆”,其半径记为RBD.图1中三个编队的RBD依次为
1.3.2 实际捕捉坐标系
末制导雷达对目标的实际捕捉坐标系为固定在舰船上的OXYZ坐标系.过编队散布圆心O与编队运动方向定义为X轴,Y轴垂直于X轴,OZ轴垂直于OXY构成的平面.以图1所示的环形编队为例,设其初始航行方向为0°(指向X正轴方向,并定义逆时针方向为角度增加方向).设在末制导雷达搜索时刻,编队的实际航向为ζ,则让编队队形绕编队队形散布圆的圆心旋转角度ζ,导引头开始搜索时实际捕捉坐标系如图2所示.
R0为导引头与编队圆心的距离,M和M′分别为导弹t0和t1时刻在坐标系中的投影.VM和VT分别为导弹和舰艇编队运动速度.Δφ为末制导雷达在搜索过程中相对于编队目标T1的方位角变化,δ和θ分别为t0和t1时刻导弹与目标T1相对于导弹运动方向的夹角,α表示雷达入射余角,β为雷达入射方向相对于编队1中心舰船初始航向的方位角,则雷达入射方向可表示为[6]

图2 末制导雷达实际捕捉系示意图

在导弹搜索时间Δt内,设导弹与目标相对运动速度为v,其可表示为导引头飞行速度vd=[vdxvdyvdz]和舰船航行速度vs=[vsx00]的合成:

以ωm表示导引头飞行与舰船航行所产生的有效转动角速度矢量,且有

它垂直于雷达视线与目标相对速度矢量所构成的平面.
1.3.3 由ωm引起导弹与目标相对转角变化
由ωm导致的导弹与目标相对转角包括两部分:1)导引头飞行引起的转角变化

假设导弹飞行速度为300m/s,初始俯仰角αv,∂=5°(雷达在搜索阶段高度较低),飞行时间Δt=60 s,距离编队圆心的距离为30km,则转角变化为

因此,可忽略在末制导雷达搜索阶段的俯仰角度变化.
2)舰船航行产生的转角变化

假设舰船航速为30节,约15m/s,β=60°,则
由于舰船速度远小于导引头运动速度,故该部分转角变化可忽略.以上分析均针对编队1的中心目标,对其他目标分析类似.
1.3.4 导引头飞行引起的舰船方位角变化
导弹的飞行方向是朝向编队散布圆的圆心,此时位于编队圆心的舰船在导弹飞行过程中的方位角不会发生变化,考虑编队圆心外的其他舰船T1.
编队的实际航向为ζ,经推导得实际捕捉系中的一点T′1[x′1,y′1]T,是其初始位置T1[x1,y1]T绕其旋转基准点O[x0,y0]T旋转角度ζ后的位置:

导弹距离海平面高度远远小于导弹与编队的距离,因此可近似认为|OM|=R0,点M(xm,ym)=M(R0cosβ,R0sinβ),经过一段飞行时间Δt后,导弹在水平面上的投影M′(x′m,y′m)=M((R0-|vm|· Δt)cosβ,(R0-|vm|·Δt)sinβ),可得

假设探测到的ζ=45°,β=80°,Δt=60s.计算可得方位角变化Δφ=13.62°,导弹与目标T1的初始方位角λ=δ+β-ζ,而

由上述假设条件计算可得δ=6.32°.
获得的弹目相对方位角变化范围为41.31°~54.93°,同理,根据图1所示的编队初始位置及上述分析的具体变换,可推导出其他目标的相对角度变化关系.经推导可得0°≤Δφ≤15.58°.当|β-ζ|=0°时对应方位角变化最小,为0°;|β-ζ|=57°时对应方位角变化最大,为15.58°.
2 待识别目标基本结构体分析
当雷达工作在高频区时,根据高频区几何衍射理论,在电磁波照射下,目标后向散射场主要包括:电磁波在目标表面经奇次或偶次反射形成的后向散射、边缘绕射形成的后向散射、尖端的散射、反射与绕射复合而成的后向散射等等[2].目标通常也被看作是许多点散射中心(如镜面、腔体、二面角和三面角等)的集合,这些散射中心的后向散射或反射特性差异较大[7],因此可通过对舰船目标进行距离多结构的分析识别不同目标.
仿真的舰船模型主要包括某型驱逐舰(destroyer)、某型护卫舰(frigate)、某型濒海战斗舰(Littoral Combat Ship,LCS)及某型航母(aircraft).
经分析这些舰船的主要散射源有如下几种:
1)主要垂直散射体:尾封板,船体侧壁,部分上层建筑侧壁.这些侧壁与甲板等构成二面角,是较强的散射源.
2)由以上多个二面角组成的三面角散射体.
3)艏部结构:艏部是一种平缓的弧线变化,这种变化相当于提供了一个类似法线方向入射并引起法向反射的尖劈.
4)桅杆,烟囱,舰炮等散射体类似为圆柱体.
3 基本几何体可分性分析
3.1基本几何体仿真分析
仿真选择的基本几何体主要包括二面角、三面角、尖劈和圆柱体.为分析不同基本体的RCS序列变化趋势及不同基本几何体尺寸对该趋势的影响,对上述情况分别进行了仿真.仿真结果如图3和图4所示.

图3 不同尺寸二面角的RCS随方位角变化曲线
图3 为不同尺寸二面角的RCS随方位角变化曲线,二面角长宽均分别为1m、3m、5m、7m和9 m.由图3可知,随着二面角尺寸增加,其RCS幅度也对应增加,但其RCS变化趋势是基本一致的.
为了消除幅度的影响,各取一组基本体的RCS随方位角变化曲线,并对该基本体的幅度进行二范数归一化处理,结果如图4所示.
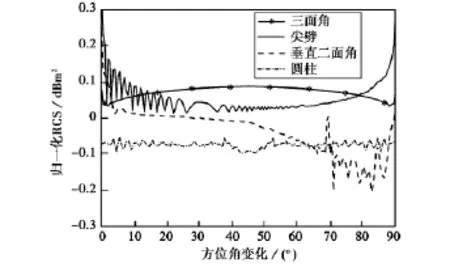
图4 不同基本几何体的RCS随方位角归一化变化曲线
由图4可知,随着方位角变化,不同基本几何体归一化RCS的变化趋势并不一致.
仿真结果表明:三面角的RCS变化趋势相对于45°位置处对称,并随方位角增加呈先上升后下降趋势;二面角RCS变化趋势为先急剧下降,后缓慢下降,到50°左右后下降趋势增大,并呈震荡趋势;尖劈RCS变化趋势显示震荡下降到45°位置左右后再逐渐上升;圆柱的RCS变化趋势基本为一条直线.由上述分析可知,基本几何体的RCS变化趋势与基本几何体的结构密切相关,且对应基本几何体的结构不同其趋势变化互不相同.因此,可选择覆盖不同基本几何体基本尺寸的归一化RCS序列作为目标HRRP序列匹配对象,完成对目标的多结构识别研究.
3.2基本几何体可分性判据研究
通过上述定性分析可知,随方位角变化不同基本体的RCS序列变化趋势不同,下面定量地分析不同基本几何体之间的可分性.
首先,对尺寸为1~10m,尺寸间隔为0.5m的不同基本几何体进行仿真,该尺寸基本覆盖舰船上基本几何体尺寸.然后,将不同基本几何体的RCS序列进行二范数归一化以消除幅度影响.每类基本几何体可获得不同尺寸下共19个同样维数的RCS序列.
设已有c类模式集Sj={x(j)i;i=1,2,…,nj}(j=1,2,…,c),上标j表示类内模式的序号,nj表示每类模式的序列维数,各类模式取值相同记为N.则ωj类模式样本均值向量为

类内N维向量之间的欧式距离定义为


类间距离定义为

4 目标HRRP结构相似性参数概率形式特征
则可分性判据可定义为

记为
4.1结构相似性参数基本定义
相似性参数可以用来表征两个目标之间的散射特征,以二面角与圆柱为例,定义两个矩阵Sdihedral和Scylinder之间的结构相似性参数为

此时,若δi,j>1认为两类模式是可分的,则认为研究的基本几何体之间是可分的,且可以将δi,j的值大小作为可分性程度的度量.
取角域起始角度为0°,步进为0.5°,终止角度与起始角度之间相差6°(角度选择在5.2节中说明).变化趋势如图5所示.

图5 小角域变化可分性值
符号‖‖22表示矢量各元素模的平方和.可定义目标与二面角、三面角、圆柱和尖劈的相似性参数分别为hdihedral、htrihedral、hcylinder和hwedge
4.2HRRP结构相似性参数概率形式描述
在步进频雷达体制下,目标获得的频域HRRP变换到时域后为

经预处理后,目标所占的距离单元区域为[n1,n2].在目标结构相似性参数基础上,可构造参数的概率形式描述.在目标区域,定义目标与二面角相似性参数的概率形式为

由图5可知:二面角与尖劈之间在起始方位角较小时的可分性值偏小,最小可分性值为2.77;而二面角与尖劈和二面角与三面角在起始方位角为50°后可分性值急剧增大;三面角与圆柱的变化趋势起伏较为平缓.这均与图4所示的不同基本几何体的RCS随方位角的归一化变化曲线趋势相符.
上述分析说明,在小角域的情况下,基本几何体之间均是可分的,这为研究目标的距离多结构识别奠定了基础.
式中,m代表目标的距离单元,目标所占的距离单元区域为[n1,n2],依次可定义目标与其他几种基本体相似性参数的概率rtrihedral、rcylinder、rwedge.从各相似性参数的概率定义可知,其取值区间是[0,1],且各概率之和为1.将该相似性参数的概率组成一组特征,这实际上描述了目标结构的后向散射相似性.
4.3RMIM方法
提出的RMIM方法具体流程如下:
1)截取时域HRRP的目标区域,占据单元数长度为L.若所使用数据为转台数据,目标与雷达之间没有平动,可回避平移匹配问题.但针对真实的运动目标数据,可使用逆合成孔径雷达(Inverse Synthetic Aperture Radar,ISAR)中成熟的包络对齐技术[8]来处理方位帧内的距离像样本,并使用运动补偿技术[9-10]将真实运动目标转换成转台目标.
2)按照式(3)获取弹目相对方位角变化,并按照ε等方位角间隔提取目标的多次HRRP.获得的HRRP序列记为ST={x(T)i;i=1,2,…,N},则ST是一个L×N维的矩阵,其中T代表目标,L代表HRRP占据的单元数长度,N代表获得HRRP序列的长度,N与角度变化范围及角度采样间隔ε有关.
3)取基本几何体与获得的弹目相对方位角变化同样区间的RCS序列,序列间隔与目标HRRP间隔一致取为ε.如3.2.1节所述,考虑不同基本几何体尺寸共可获得19个维数一致的RCS序列.将该19个RCS序列进行二范数归一化后取平均值作为基本几何体的RCS序列变化趋势.
4)取目标HRRP对应距离单元的变化趋势,分别按照式(14)、(16)计算目标与基本几何体之间的结构相似性参数及结构相似性参数的概率形式.
5 仿真分析
5.1仿真实验数据说明
首先,采用某电磁仿真软件仿真了某型濒海战斗舰(LCS)、某型护卫舰(frigate)、某型驱逐舰(destroyer)和某型航母(aircraft)共4类舰船的转台数据,仿真采用的方位角为0°~360°(0°为正对船头方向,逆时针方向为方位角增加方向),掠射角为5°,单次样本按0.5°等方位角间隔产生,雷达和舰船的参数如表1所示.

表1 仿真实验舰船和雷达参数
5.2相似性参数概率形式特征的有效性
为度量不同类别目标特征的可分性,需制定一定准则——类别可分性度量准则,此处选用常用的类内、类间离差矩阵作为可分性度量的准则.可分性判据值如下[11]:

式中,Sw和SB分别表示类内和类间离差矩阵.J越大,说明选用的特征使得不同类别的可分性越好.
对四种类型的舰船目标按照5.1中所述仿真条件获得全方位的HRRP数据.以LCS舰船为例,选择起始方位角从0°开始,步进0.5°,终止角度与起始角度之间相差6°(角度大小按1.3.2节所述可获得目标相对角度变化且进行多次仿真实验后选定).通过4.2节中定义的RMIM方法计算目标与基本几何体之间结构相似性参数及其概率形式.按式(17)计算得到四类舰船目标相互之间在不同基本体上的可分性值.俯仰5°、方位0°~30°任意两类舰船目标在不同基本体上的可分性值如图6所示.
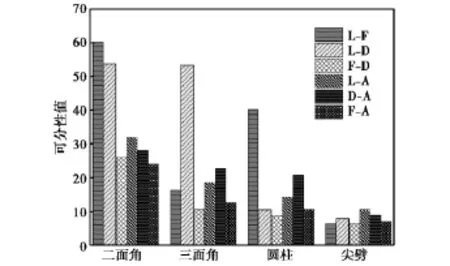
图6 舰船相似性参数概率形式特征的可分性值
图6 中,L、F、D和A分别代表LCS、frigate、destroyer和aircraft.由图6可知,目标结构相对于dihedral的可分性值普遍偏高,而相对于wedge的可分性值则相对较低.总体而言,目标结构与四种基本体的相似性概率特征可分性值均较高,在识别中可选用这四个特征,其可分性直接反映了舰船目标之间物理结构的差异.同时考虑编队情况下,各个舰船目标相对于末制导雷达的相对角度变化情况不同,舰船之间相似性参数概率形式特征的可分性值还会进一步变大,这将更有利于对目标的识别.
5.3仿真数据特征选择与识别性能
根据上述推导及对特征有效性的实验与分析,选取反映目标结构相似性概率的特征参数rdihedral、rtrihedral、rcylinder和rwedge组成特征矢量(即特征矢量维数为4)进行四类舰船目标分类识别.
选择适合小样本分类的支持向量机(Support Vector Machine,SVM)作为分类器,采用的核函数为高斯核函数,经多次试验参数设置为δ=0.5.如图2所定义,仿真条件设置为ε=0.5,俯仰角α=5°,β=45°,ζ=0°~90°,步进为1°.以图1中的环形编队为例,通过式(7)计算得到舰艇编队各个目标相对方位角度Δφ的变化,如图7所示.

图7 舰艇编队各个目标相对方位角度变化
由图7可知,T1舰船的相对方位角变化Δφ在ζ位于0°~32°及58°~90°时大于门限值(门限值按1.3.2节中所述可获得的目标相对角度变化且进行多次仿真实验后选定);T2与T4舰船的相对方位角变化Δφ在ζ的整个变化范围内均大于门限值;T3舰船的相对方位角变化Δφ在ζ位于0°~18°及73°~90°时大于门限值;而位于编队散布圆圆心的T5目标的Δφ恒等于0°.因此,训练数据为T1目标在ζ位于0°~32°及58°~90°的66幅距离像提取的特征数据,T2与T4目标在ζ位于0°~90°的各91幅距离像提取的特征数据,T3目标在ζ位于0°~18°及73°~90°的38幅距离像提取的特征数据,即训练样本个数为285.测试数据与训练数据相同,噪声数据均为频域复高斯白噪声.针对人字形编队与菱形编队的分析类似,识别实验的平均结果如表2所示.

表2 舰船编队相似性参数概率形式特征的平均识别结果
实验结果表明:在方位角变化90°范围内,采用提出的RMIM方法提取的特征能保持较高的识别率.但文中设定的条件下针对环形编队T5目标不能产生RMIM识别方法需要的相对方位角的变化,因此其识别率是针对T1~T4目标的,通过前期外部传感器检测可获得编队目标的船型信息,在保持一个高的识别概率下识别出T1~T4目标后,T5目标也能进行正确的判断.同时,针对在方位角变化范围内某些目标的相对角度变化低于门限的情况,可按照文献[2-5]中采用小角域范围内的HRRP序列进行补充识别.
5.4实测实验数据处理及说明
由于条件限制,实测数据来源为两种大型客船和一种小型货船的分批雷达测量数据,雷达测量系统的工作频率为X波段,距离分辨率为7.3m,波形采用线性调频方式,采样频率为40MHz.两种大型客船为非合作目标,小型货船为合作目标,客船1长164m,宽24m,吃水深度6m;客船2长164m,宽24m,吃水深度6m;货船长98m,宽21m,吃水深度3.9m.
对客船1某两次天线扫描后结果如图8所示.

图8 客船1某两个时刻的回波扫描图
由图8可知,圆圈所示客船1距离雷达越来越远,方位角也不断发生变化,获得的距离像存在距离平移.
提取客船1某次回波数据按距离对回波幅度归一化后的距离像如图9所示.

图9 客船1某时刻的回波扫描图
图9 中标记的7.68×102及附近距离单元为待测目标,而它周围5.45×102及9.51×102处附近的距离单元是干扰目标.由图9可看出实测数据的信杂比较高,采用恒虚警概率为10-5的恒虚警检测器对目标回波进行检测,去除不需要的海杂波,提取待测目标占据的距离单元,得到检测结果中目标占据的距离单元长度不一,为后期采用相似性参数的概率形式特征进行识别实验需要不同目标的距离单元维数一致,考虑三种船型的尺寸及具体场景中不同船只距离方向上的间隔,选取每次恒虚警检测后目标回波峰值左右各30个距离单元对目标距离单元进行维数扩展.共选取的61个距离单元满足对目标的距离方位覆盖,且在距离维上不会覆盖其他目标.同时,需要使用ISAR中成熟的包络对齐技术来处理方位帧内的距离像样本,并使用运动补偿技术将真实运动目标转换成转台目标.通过多次测量和处理同型客船进出港后获得两种客船的数据为:
客船1 俯仰角为0°,方位角范围为0°~4.5°和63°~360°(沿船头逆时针方向为角度增加方向),方位角间隔为0.5°;
客船2 目标俯仰角为0°,方位角范围为0°~6.3°和55°~360°,方位角间隔为0.5°.
未能获取全方位数据的原因是目标船只出港时干扰舰船密集因此未采集数据,在船只出港一段时间后船只姿态角相对于导引头已有一定夹角,方位角角度开始测得的值较大,回港时可测得船头及沿船头顺时针方向的部分角度,因此,综合获取的实测数据如上所示.
货船为合作目标,采集的数据为俯仰角0°,方位角0°~360°,方位角间隔为0.1°.
5.5 实测实验数据分析
综合考虑,选取的训练数据为三种船型俯仰角0°、方位角开始角度为180°~354°,终止角度与起始角度之间相差6°,方位角间隔均为0.5°,距离单元数均为61.为验证不同方位起始角对目标识别的影响,选取的测试数据如下:
客船1、客船2和货船的俯仰角度均为0°,方位角初始角度均分别为180°~234°、240°~294°和300°~354°,终止角度与起始角度之间相差6°,方位角间隔均为0.5°的数据.三类目标测试样本总数为327个,选取的测试数据基本包含了目标训练时各种方位角的情况.
通过4.2节中定义的RMIM方法计算目标与基本几何体之间的结构相似性参数及结构相似性参数的概率形式,识别实验的平均结果如表3所示.
ζ代表方位角初始角度,Pa代表平均识别率,S1、S2和S3分别代表客船1、客船2和货船.由表3可知,不同方位角下的目标平均识别率不同,舰船头与尾的平均识别率要高于舰船侧翼的识别率,舰船头部与尾部的方位角度下,舰船距离像长度较长,反映了目标更为精细的结构信息,此时目标之间的可分性较优.

表3 舰船相似性参数概率形式特征的平均识别结果
6 结 论
针对现役末制导雷达在目标识别时未充分利用其在搜索阶段获得的HRRP序列的情况,提出了基于宽带雷达目标HRRP序列的距离多结构识别方法.该方法通过获取末制导雷达在搜索阶段与目标相对视线变化的HRRP序列,与不同基本几何体在相应方位角变化的趋势按照最大匹配准则获得目标距离多结构,判断目标与基本几何体的结构相似性参数概率形式提取识别需要的特征,完成对舰船目标的识别.
该方法充分利用了末制导雷达在搜索阶段获取的目标大角域HRRP序列,通过对末制导雷达搜索期间获得的大角域HRRP样本进行联合处理,可以获得目标更多的信息,增强目标识别能力.在搜索结束后可根据给出精确的导引信息实现对目标部位级的精确打击,提高导弹的效费比.通过对三种典型编队目标的仿真与外场非编队舰船目标的实测数据证明该方法是有效的.
[1] 刘华林,杨万麟.基于直接辨别分析的雷达目标一维距离像识别[J].电波科学学报,2007,22(6):1020-1024.
LIU Hualin,YANG Wanlin.Radar target recognition based on direct discriminant analysis using range profile[J].Chinese Journal of Radio Science,2007,22(6):1020-1024.(in Chinese)
[2] DU Lan,WANG Penghui,LIU Hongwei,et al.Bayesian spatiotemporal multitask learning for radar HRRP target recognition[J].IEEE Trans on Signal Processing,2011,59(7):3182-3196.
[3] WANG Penghui,DU Lan,LIU Hongwei.A spatiotemporal model for radar HRRP sequence recognition[C]//2010IEEE Radar Conference,2010:1005-1008.
[4] ABDOLLAH A,MAHDI H,MOHAMMAD M N,et al.Statistical modeling of consecutive range profiles for radar target recognition[C]//14th International Radar Symposium(IRS),2013(2):608-613.
[5] 袁 莉.基于高分辨距离像的雷达目标识别方法研究[D].西安:西安电子科技大学,2007.
YUAN Li.Study on Radar Target Recognition Based on HRRP[D].Xi’an:Xidian University,2007.(in Chinese)
[6] 任 艳,杜琳琳,陈曾平.基于末制导雷达的海面舰船ISAR成像转角分析[J].宇航学报,2011,32(2):401-406.
REN Yan,DU Linlin,CHEN Zengping.Analysis of rotation angle condition in ship target ISAR imaging based on terminally guided missile-borne radar[J].Journal of Astronautics,2011,32(2):401-406.(in Chinese)
[7] 郭尊华,李 达,张伯彦.雷达高距离分辨率一维像目标识别[J].系统工程与电子技术,2013,35(1):53-60.
GUO Zunhua,LI Da,ZHANG Boyan.survey of radar target recognition using one-dimensional high range resolution profiles[J].Systems Engineering and Electronics,2013,35(1):53-60.(in Chinese)
[8] 杜雨洺,杨建宇.线性FMCW雷达动目标一维距离像运动补偿[J].电波科学学报,2006,21(1):104-116.DU Yuming,YANG Jianyu.Motion compensation of 1-D range profile for linear FMCW radar[J].Chinese Journal of Radio Science,2006,21(1):104-116.(in Chinese)
[9] 刘红超,纠 博,刘宏伟,等.一种匀加速空间目标高分辨距离像补偿算法[J].西安电子科技大学学报,2012,39(4):81-86.
LIU Hongchao,JIU Bo,LIU Hongwei,et al.High resolution range profile compensation algorithm for the space target with uniform acceleration[J].Journal of Xidian University,2012,39(4):81-86.(in Chinese)
[10] 何 劲,张 群,罗 迎,等.线性调频步进信号雷达目标运动参数估计方法[J].电波科学学报,2012,27(2):246-253.
HE Jin,ZHANG Qun,LUO Ying,et al.Motion parameter estimation for frequency-stepped chirp signal radar target[J].Chinese Journal of Radio Science,2012,27(2):246-253.(in Chinese)
[11] 郭 雷,肖怀铁,赵宏钟,等.宽带全极化雷达目标HRRP极化特征提取与优选[J].自然科学进展,2009,19(7):784-792.
GUO Lei,XIAO Huaitie,ZHAO Hongzhong,et al.HRRP polarization feature extraction and optimization of bandwi-dth polarization radar target[J].Progress in Natural Science,2009,19(7):784-792.(in Chinese)
Target identification method of terminal guidance radar based on range multi-structure
DAN Bo1JIANG Yonghua1LI Jingjun1LU Yi2
(1.Department of Electronic and Information Engineering,Naval Aeronautical and Astronautical University,Yantai Shandong264001,China;2.Navy Armament Department,Chengdu Sichuan 610100,China)
Aiming at the circumstance that the high resolution range profile(HRRP)sequence acquired by the terminal guidance radar in its search phase was not fully used,we proposed range multi-structure identification method based on HRRP sequence of broadband radar target.Firstly,the method acquired the change HRRP sequence along the line of sight between the target and the terminal guidance radar in the search phase.Then,it obtained the target range structure according to maximum matching rule which acted on the radar cross section(RCS)change trend between different basic geometry and target with corresponding azimuth.Finally,by judging the probability form of structure similarity parameter between the target and basic geometry,it extracted the characteristic and accomplished the identification of the ship targets.The simulation of three kinds of typical target formation and the non-formation ship target’s measured data show that the method is effective.
HRRP sequence;range multi-structure identification;formation target
TN957.51
A
1005-0388(2015)02-0307-09

但 波(1985-),男,四川人,海军航空工程学院博士研究生,主要研究方向为反舰导弹目标识别与选择技术.

姜永华(1957-),男,黑龙江人,海军航空工程学院教授,博士生导师,主要研究领域为精确制导技术

李敬军(1982-),男,博士研究生,山东人,海军航空工程学院博士研究生,主要研究方向为制导雷达信号设计与处理.

卢 毅(1981-),男,湖南人,海军装备部重庆军事代表局军代表,博士,主要研究方向为目标识别与选择技术.
但 波,姜永华,李敬军,等.基于距离多结构的末制导雷达目标识别方法研究[J].电波科学学报,2015,30(2):307-315.
10.13443/j.cjors.2014030201
DAN Bo,JIANG Yonghua,LI Jingjun,et al.Target identification method of terminal guidance radar based on range multi-structure[J].Chinese Journal of Radio Science,2015,30(2):307-315.(in Chinese).doi:10.13443/j.cjors.2014030201
2014-03-02
总装精导基金资助课题(9140A01010411JB1401)
联系人:但波E-mail:lovelin19841204@163.com
猜你喜欢
舰船科学技术(2022年21期)2022-12-12
数学物理学报(2022年5期)2022-10-09
舰船科学技术(2021年12期)2021-03-29
河北画报(2020年8期)2020-10-27
空间科学学报(2020年4期)2020-04-22
现代计算机(2018年19期)2018-08-01
中学生数理化·七年级数学人教版(2017年1期)2017-03-25
浙江大学学报(工学版)(2016年2期)2016-06-05
舰船科学技术(2016年1期)2016-02-27
河南科技(2015年18期)2015-11-25
