基于伪经/纬度的极区格网导航方法研究
2015-07-01 07:57张萍萍孙永侃王海波
兵器装备工程学报 2015年4期
张萍萍,孙永侃,王海波
(海军大连舰艇学院,辽宁大连 116018)
当船舶航行接近北磁极,磁罗经的稳定性降低到一个临界值,而无法实现精确指向。此时船舶可以由陀螺导航设备进行导航,但其真航向的持续指示依赖于陀螺仪指向的修正,其中包括对地球速率的补偿,由于陀螺仪趋向于保持子午线的方向,因此必须对船舶相对大地平面的运动进行修正,在中低纬度,陀螺的修正能够达到足够的精度,但是在高纬度地区速率修正极大,无法实现;此外,天文真航向的计算是有误差的,任何经度上的推算定位误差会直接对地方时角产生影响并因此影响测者方位的计算。GPS 系统由于覆盖角度的关系对极区定位存在缺陷。由此可见极区船舶航行缺乏精确的方位信息保障,因此对高纬度惯性导航方法的研究是必要的。
1 格网导航
本文提出的格网导航是通过在海图上印制格网来辅助导航系统在高纬度地区的定位。其中需要将一条特定的子午线作为格网基准子午线,以此来定义格网北。然后绘制平行于格网基准子午线的一系列的平行线。由于格网北相对于海图上的所有点都是统一的,因此不再需要进行运动修正。另外,当转换为格网模式后,格网航向的值等于真航向与格网收敛的代数和,其中格网收敛的值为经度的变化值与圆锥常数(相对于基准子午线)的代数积,这样就使载体方位角误差以及真航向误差都能够得到保证。
1.1 横墨卡托投影下的格网的建立
本文对极区导航方法的研究中采用了横墨卡托投影海图。GNC 1N 中所指定的用于极地地区的横墨卡托投影海图为美国1∶5 000 000 的地球导航与计划海图系列中的一种。本文阐述的方法是假设需要在北极地区使用的,但这种方法同样也适用于覆盖了南极地区的海图。GNC 1N 海图南向覆盖至北纬67°45',本文阐述的方法利用了GNC 1N 横墨卡托投影海图上的套印格网来进行极区导航。
1.2 已知地理坐标(φ,λ)求解横墨卡托格网坐标(x,y)
以弧度表示的某点的地理坐标为(φ,λ),该点的横墨卡托坐标为(x,y),当已知(φ,λ),需要求解(x,y)时:
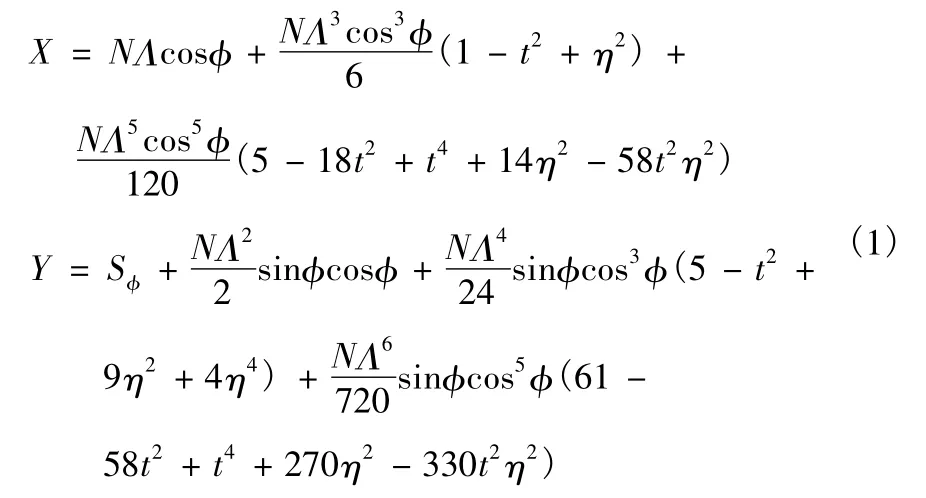
其中:
Λ=λ-λ0(弧度)
λ0=中央子午线的弧度
1.3 已知横墨卡托格网坐标(x,y)求解地理坐标(φ,λ)
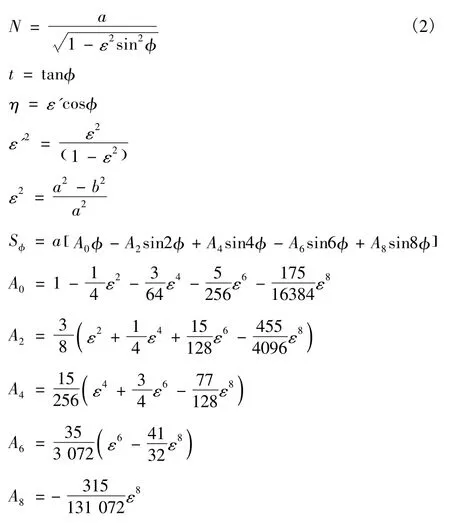
1.3.1 求原始点的纬度φ1
已知(x,y),要想求出(φ,λ),需要首先通过迭代方法求出原始点的纬度φ1

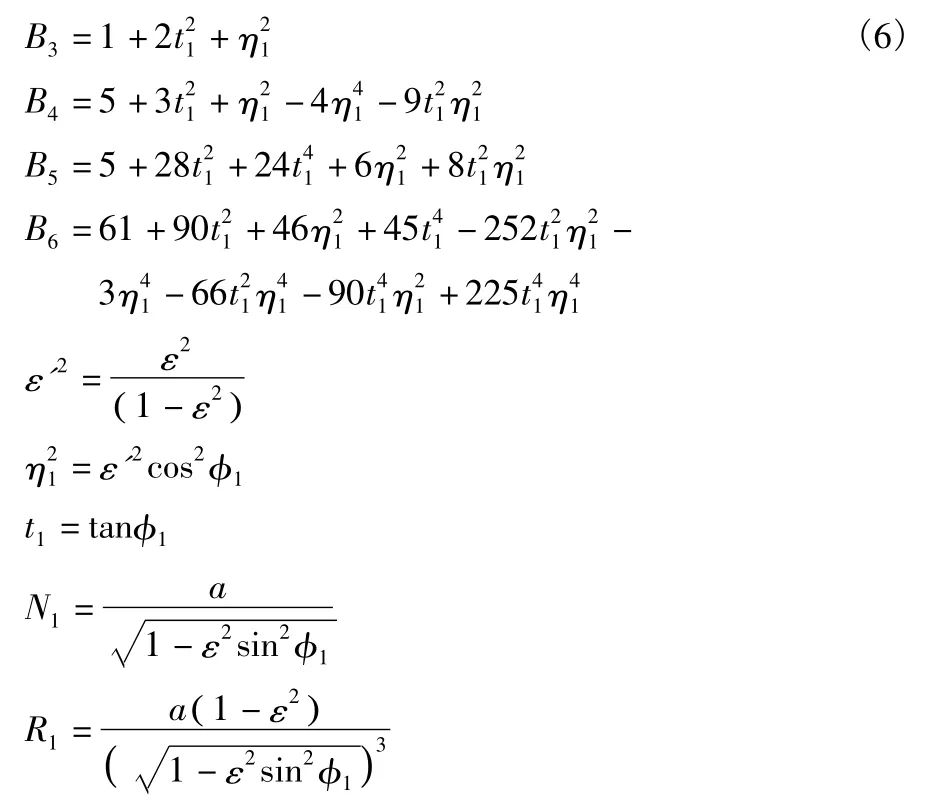
其中

并且Sφ,A0,A2,A4,A6,A8是在式(2)中定义的。
令第一个候选点φ1为φ=y/a,把这个值代入等式(3),则得到刷新的φ1候选点为φ',类似的,依此类推进行迭代计算,新的φ'值通过迭代计算不断由上一个φ'值计算得到,当两个相邻φ'值充分接近,则原始点φ1的纬度设为φ' 。
1.3.2 通过φ1求出(φ,λ)
一旦确定了φ1,则(φ,λ)可通过近似值的逼近计算得到:
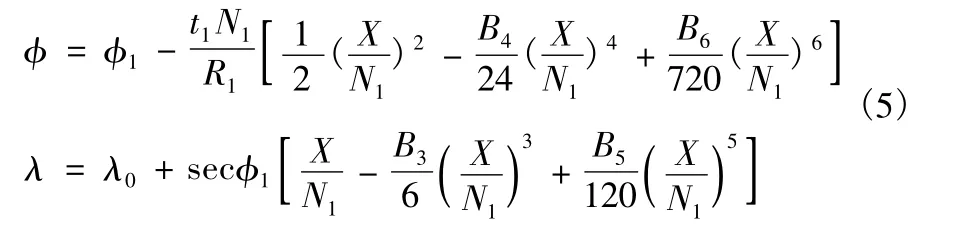
其中:
2 伪经纬度模式下的导航
2.1 伪经/纬度的建立
按照地球特有的自转轴而将地球表面划分为经纬度的方法是我们所熟知的。从数学意义上讲,将地球球面划分成经纬度表示的系统,可以是任意分割的,任何绕地球的大圆都可以被选择作为“赤道”,从而通过与赤道平面正交并且通过球心的平面能确定相应的“极点”。其实收敛速率的难题仅仅出现在“极点所在位置”。
本文提出解决极区导航的伪经纬度方法是指将地球表面以另外一种方式进行划分:即在通过极点处设置一个伪赤道,在赤道上设置一个伪极点。然后依据伪赤道和伪极点设置伪子午线和伪经线,这样就可以进行伪经纬度的定义和测量。为了使两个系统之间的数学变换最为简便,本文以90°来进行轴的旋转。
这样在横墨卡托投影上的格网实际上是一种伪经纬度结构。在海图中,圆柱被放置于90°W/90°E 子午线的切向方向。那么这个子午线和其下子午线可以看成伪赤道。新的极点位于0°/180°W 与赤道的交点处。伪子午线是穿过伪极点的大圆;大圆在投影上表示为直线并且正交于伪赤道(这与墨卡托投影中的子午线投影类似)。伪纬线正交于伪子午线。
图1 给出了赤道与极点互相正交的伪赤道和伪极点。并给出一条穿过地球上点P 的伪子午线和伪纬线。横向圆柱被置于90°W/90°E 的正切位置。图2 给出了投影到新的圆柱上的伪经/纬度示意图。纬线(经线)间的间隔为10°(实线表示)。示意图给出了伪纬度和伪经度。每隔10 度用点虚线表示。伪经度的值取决于基准伪子午线的选择。本文将本初子午线0°/180°W 作为伪经度的基准。
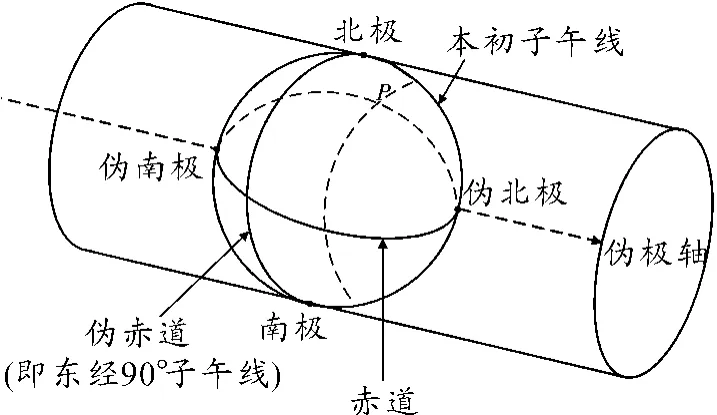
图1 横墨卡托投影下的伪赤道和伪极点
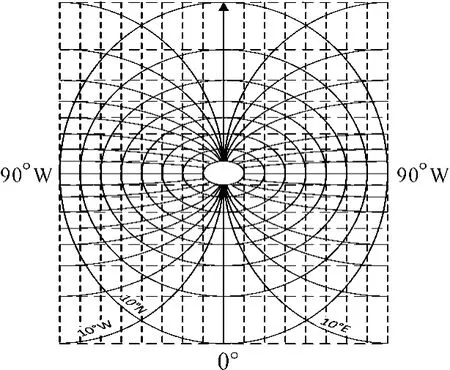
图2 横墨卡托投影下海图上的伪经纬度
2.2 伪经/纬度导航方法
当在伪经纬度模式下进行导航时,导航系统的基本方位是根据伪经纬度坐标系来读取的,其中伪经纬度坐标系由套印在海图上的格网给出。
假设船舶依靠陀螺导航设备航行,那么相对于当地伪子午线进行陀螺导航设备的初始航向设置是必要的。要进行这项工作,首先要通过常规方法确定船舶的真航向:可以通过天文航向来校正,或者通过已知基准点进行航向测量。进而通过当地子午线与当地伪子午线之间的角度差(本文中将这个角度差定义为子午线差值)对真航向进行校正,得到初始航向。其关系式如下:
初始航向=真航向±子午线差值
其中:当经度为西向时,子午线差值为正;当经度为东向时,子午线差值为负。
图3 给出了环绕北极点的4 个象限。子午线差值角可能看起来像是“收敛”的,但是实际情况并不是这样。因为两条地球经线间的角度差确实会是收敛的,但是本文中所指的子午线差值是指地球经线与伪经线之间的角度差。在80°N以上的区域,子午线差值可以看做与经度值相同。在80°N以下的区域,由于横墨卡托投影的经线投影为曲线,导致这种直接的关系不再成立。在高纬度地区,弯曲曲率被最大限度的近似为象限角,即沿着45°/135°经线。在75°N,在经度值为45°和135°时,子午线差值角与经度有1°的差值;在经度为20°时,差值仅为0.6°。为了对子午线差值进行快速计算,如图4 中所示,需要提取修正因子,以适用于经度的计算。这个过程与兰伯特正形投影中通过罗经航向的经度值与圆锥常数n 相乘的方法来推算收敛因子是类似的。
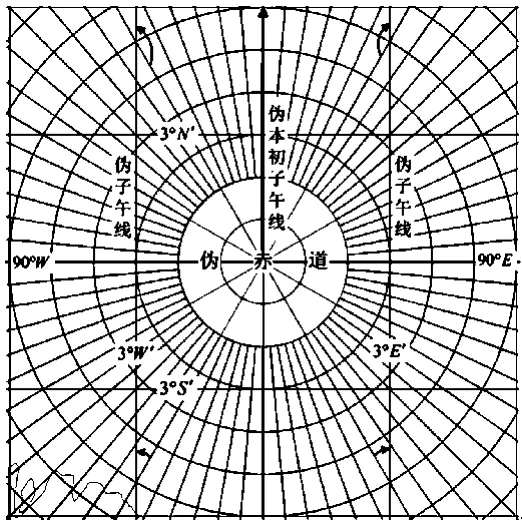
图3 子午线差值角
在航行期间,导航系统需要进行航向校验。例如在伪经纬度为12°00'S,05° 00'W 的位置,导航系统进行航向校验,此时从海图上读得的相应的地理经纬度值为77°00'N,22°05'W。然后导航系统参照图4 读出修正因子,从中提取0.6°应用到经度计算中并进一步计算出子午线差值。那么计算出的子午线差值为22.7°。
本文中假设导航系统的输出显示并不是通常意义下的经纬度,而是伪经/纬度。那么在正交的方格标线上标绘不会产生其他问题,对伪纬度的纬线测距方法与标准墨卡托投影海图的测量非常相似。伪经纬度模式下的格网导航,海图上的直线是“伪”恒向线,这样便于测绘标图。要实现伪经纬度方法,应配合相应海图的发行。因为目前海图是采用墨卡托投影来表示方位的,那么通过常规标图方法或子午线的使用,就可以在海图上建立伪纬线和伪经线。
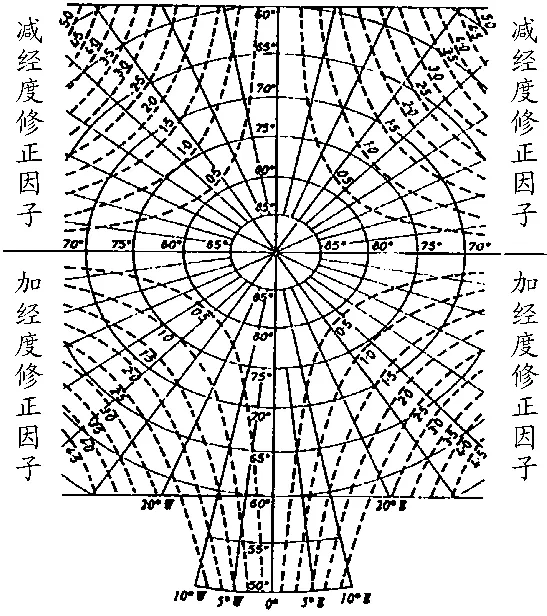
图4 经度修正因子
3 结论
为了克服极区地理经线快速收敛而导致的导航难题,本文提出伪经/纬度模式下的格网导航方法,通过设定虚拟赤道和虚拟极点,配合在海图上套印导航格网来进行极区格网导航。对伪经纬度的建立方法以及伪经纬度模式下的航向推算方法进行了详细阐述,理论分析证明本文提出的方法能够使导航系统工作至90°的地理纬度,并且能够在海图上进行精确标图,能够为船舶极区航行提供精确的方位信息。
[1]秦永元.惯性导航[M].北京:科学出版社,2006.
[2]Dyer G C. Polar Navigation-A New Transverse Mercator Technique[J]. Journal of Navigation,1971,24(4):484-095.
[3]Fox W A W.Transverse Navigation—An Alternative to the Grid System[J]. Journal of Navigation,1949,2(1):25-35.
[4]Charles Broxmeyer.Inertial Navigation Systems[M]. New York:McGraw Hill,1964.
[5]Waldo K Lyon.The Navigation of Arctic Polar Submarines[J].Journal of Navigation,1984,37(2):155-179.
[6]Ignagni M B. All-Earth Inertial Navigation Scheme[J].Navigation,1972,19(3):209-214.
[7]陈继忠,朱启仁.基于海上高纬度地区导航设备应用方法研究[J].现代导航,2010.3:38-40.
[8]KURITSKY M M,GOLDSTEIN M S,GREENWOOD I A,et al.Inertial navigation[J].Proceedings of the IEEE,1983,71(10 ):1156-1176.
[9]ANON. Canadian ships to receive inertial navigation[J].Jane’s International Defense Review,2004(DEC):1.
[10]ANON.Northrop Grumman to supply INS for Canadian Submarines[J].Jane’s Navy International,2005,(MAR):1.
[11]GREENSPAN R L. Inertial navigation technology from 1970—1995[J]. Navigation:Journal of The Institute of Navigation,1995,42 (1,Special Issue):165-186.
猜你喜欢
农业科技与信息(2020年18期)2020-12-18
矿山测量(2020年4期)2020-09-03
航海(2020年4期)2020-08-17
空间科学学报(2020年6期)2020-07-21
少林与太极(2018年9期)2018-09-28
导航定位学报(2017年2期)2017-06-10
航海(2017年3期)2017-06-09
航海(2016年5期)2016-10-11
知识窗(2015年11期)2015-05-14
科技视界(2015年7期)2015-01-08