基于的精密单点定位在航磁飞艇定位中的应用
2015-08-02 01:54马柳州江苏省地质勘查技术院南京210049
山东工业技术 2015年9期
马柳州,梁森(江苏省地质勘查技术院,南京210049)
基于的精密单点定位在航磁飞艇定位中的应用
马柳州,梁森
(江苏省地质勘查技术院,南京210049)
摘要:根据物探环境的需求,提出了一种使用IGS精密轨道和钟差的伪距精密单点定位和精密单点定位方法确定航磁定位中基准站精密位置的方法以及在无基准站状态下单点动态精密单点定位技术,并使用IGS跟踪站的数据进行了静态及动态模拟,通过实验数据表明,使用精密单点定位方法可以为航磁飞艇定位中的基站提供厘米级定位精度,为无基站飞艇提供分米级定位精度。
关键词:航磁飞艇;静态精密单点定位;动态精密单点定位;kalman滤波;随机游走
传统的GPS单点定位是利用伪距观测值以及由广播星历所提供的卫星轨道参数和卫星钟改正信息进行定位的。其优点在于数据采集和处理比较简单、方便,用户在任意时刻只需用一台GPS接收机即可获得WGS-84坐标系中的三维坐标。但因伪距观测值的精度一般为数分米至数米,且用广播星历中提供的轨道信息所计算出的卫星位置的误差可达数米至数十米,卫星钟差的误差为±20ns左右,只能用于导航等一些低精度的领域中。如果想要提高精度,关键的是要提高卫星轨道和卫星钟差的精度。
本文探讨了使用静态GPS/GLONASS组合精密单点定位技术用于航磁飞艇定位中基站定位,以及在无基站情况下的飞艇载体动态精密单点定位技术,并使用具有精确坐标的IGS跟踪站进行了静态及静态模拟动态的精密单点定位试验。试验结果表明,静态精密单点定位可以为基站提供平面由于5厘米的精确坐标,使用随机游走模型的动态精密单点定位可为无基站状态下的飞艇载体提供分米级精度的坐标。
1精密单点定位模型
GNSS非差伪距和载波相位观测模型一般定义为:

式中:i表示L1、L2载波或C1、P2伪距观测值;j表示导航系统,分别为GPS和GLONASS;fi表示频率;k表示接收机编号;p表示卫星编号;P伪距观测值,单位米;φ载波相位观测值,单位周;λ波长,单位米;ρ站星几何距离,单位米;N整周模糊度,单位周;dtk接收机钟差,单位秒;dTp卫星钟差,单位秒;dTsys导航系统时间差,单位秒;η=40.28TEC,其中TEC为信号传播路径上的总电子含量;T信号传播路径上的对流层延迟,单位米;O卫星轨道误差(星历误差);伪距和载波的多路径效应,单位米;其他与频率无关的误差,包括地球自转,相对论效应,潮汐改正等,单位米;伪距和载波的观测噪声,单位米。
由于不同系统之间存在着系统时间差dTsys,在进行非差单点定位时,可将接收机钟差与系统时间差合并为接收机系统时间差,从而,在多系统融合时,每个导航系统设置一个接收机钟差参数。
2平差及滤波方法
由于非差精密单点定位参数较多,选用适当的参数估计方法是非差精密单点定位的关键。测量数据处理方法一般有两种:最小二乘法和卡尔曼滤波法。最小二乘差主要针对静态数据的处理,要求参数具有不变性,而在非差PPP中,接收机钟差是一个实时变化的量,所以最小二乘不适合于非差PPP,则需要使用Kalman滤波。
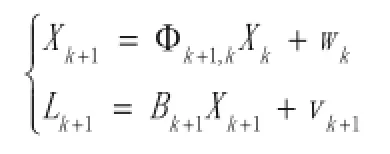
利用卡尔曼滤波处理动态数据首先需要建立滤波的动态模型(状态方程)和观测模型(观测方程),假设卡尔曼滤波的状态方程和观测方程为:
计算步骤:
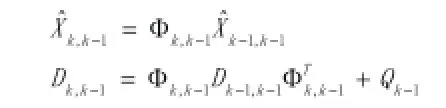
(1)根据状态方程计算预测值及预测误差矩阵:
(2)计算Kalman滤波增益:̓̓

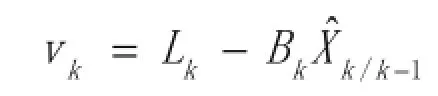
(3)根据新观测值得到:̓
(4)滤波估计值计算:

在此模型中,需要注意的有三个:D、Q、R三个矩阵的构造,其中,D为参数方差阵,需要满足初始值必须大于参数的实际方差;Q为系统动态方差阵,其设定为参数动态变化所能达到的上限;R为观测值噪声。
可以看出,滤波过程是不断的“预测一修正”的递推方式进行计算,先进行预测值计算,再根据观测值得到的新信息和卡尔曼增益矩阵(加权项),对预测值进行修正。由于滤波值可以得到预测值,又由预测值得到滤波值,并不要求存储任何观测数据就可以实时估计。卡尔曼滤波不但可以广泛用于GPS动态定位,而且可以在静态定位中应用。在静态情况下,它相当于序贯平差。
3定位结果与分析
3.1基站静态定位测试
为了测试精密单点定位在静态模式下的定位效果,探讨应用于航磁飞艇基站坐标精度,选择了IGS站BJFS和非洲埃塞尔比亚的ADIS两个站2012-03-01日的观测数据进行计算。该站装备了可以同时采集GPS和GLONASS观测数据的双系统接收机。观测数据采样率为30s,截止高度角为15°,所需的精密星历和卫星钟差均有IGS中心提供。在Kalman滤波处理中,GPS和GLONASS伪距观测值的观测噪声分别设置为0.3m和0.6m,相位观测值的观测噪声均设置为2mm。用于计算天顶湿延迟、接收机钟差、参数动态噪声的波谱密度值分别为10-9m2/s,105m2/s。定位结果与IGS分析中心CODE提供的ITRF参考框架坐标进行比较,并转换至测站坐标N、E、U三个方向。̓̓
图1为BJFS和ADIS两个站的卫星数和DOP值,由图可知,GPS和GLONASS组合后,DOP值明显降低,说明卫星几何分布状况有明显改善。图2、3为两个站的单GPS和GPS/GLONASS组合静态精密单点定位结果,由图可知,单GPS定位精度精密单点定位精度明显较组合解算低。总体来看,使用静态精密单点定位模式,可以为航磁飞艇基站提供厘米级,甚至毫米级的平面定位精度,能满足基准站坐标精度的要求。
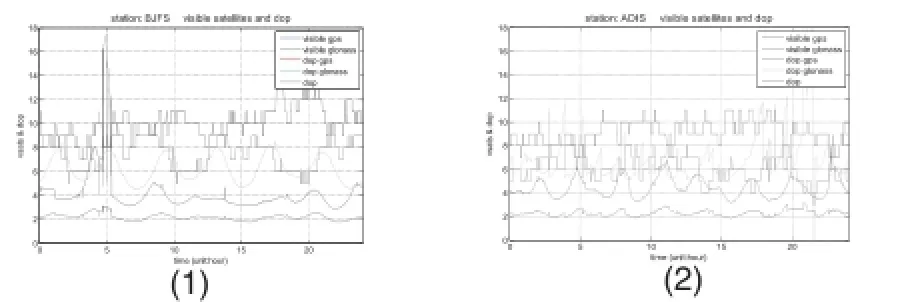
图1DOP值及卫星数
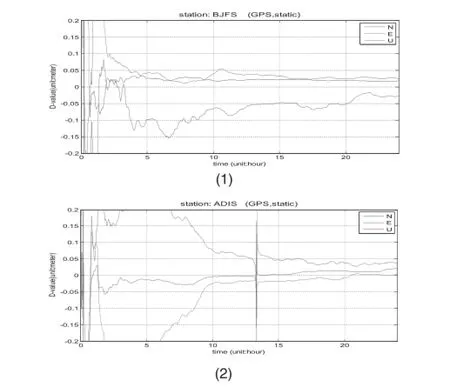
图2单GPS静态精密单点定位

图3GPS/GLONASS组合静态精密单点定位
3.2终端动态定位测试
为测试动态精密单点定位的定位性能,探讨在无基准站情况下的,飞艇单接收机动态定位的坐标精度,仍以上述两个站的数据,以静态数据模拟动态解算的方式解算。解算模式与静态模式不同的是动态定位中将位置参数模拟为随机游走过程,其波谱密度设置为102m2/s。
图4、5为使用动态模式下的单GPS和GPS/GLONASS组合定位结果,由图4可知,使用单GPS,可以实现平面分米级,高程米级的定位精度;由图5可知,使用GPS/GLONASS组合动态精密单点定位可以提供N、E、U三个方向分米级定位,且平面精度明显提高。
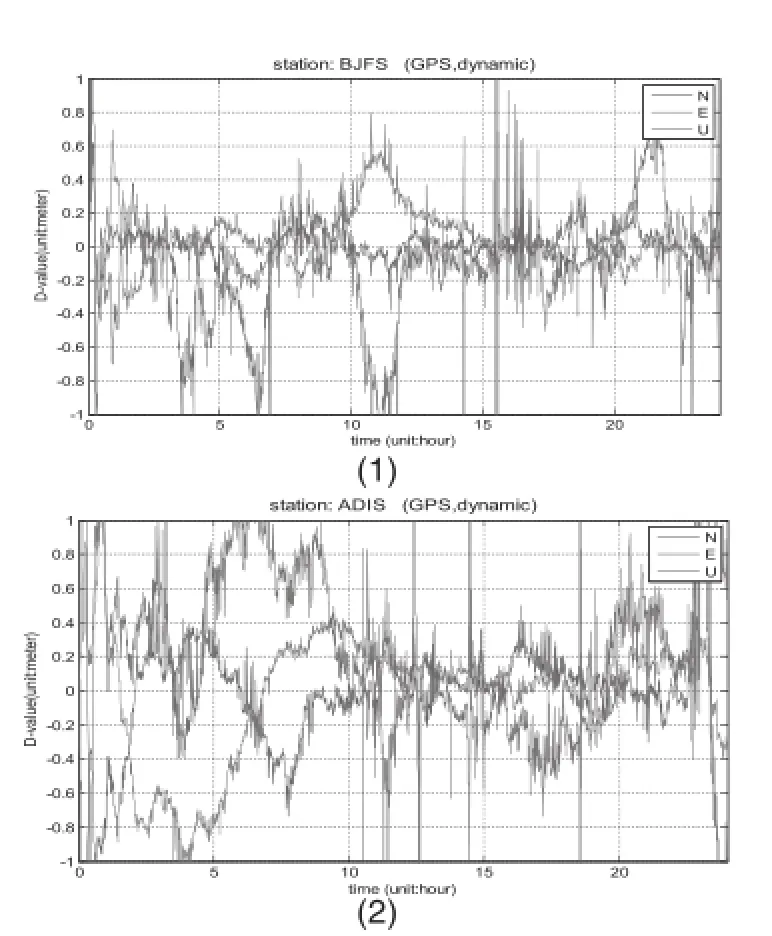
图4单GPS动态精密单点定位
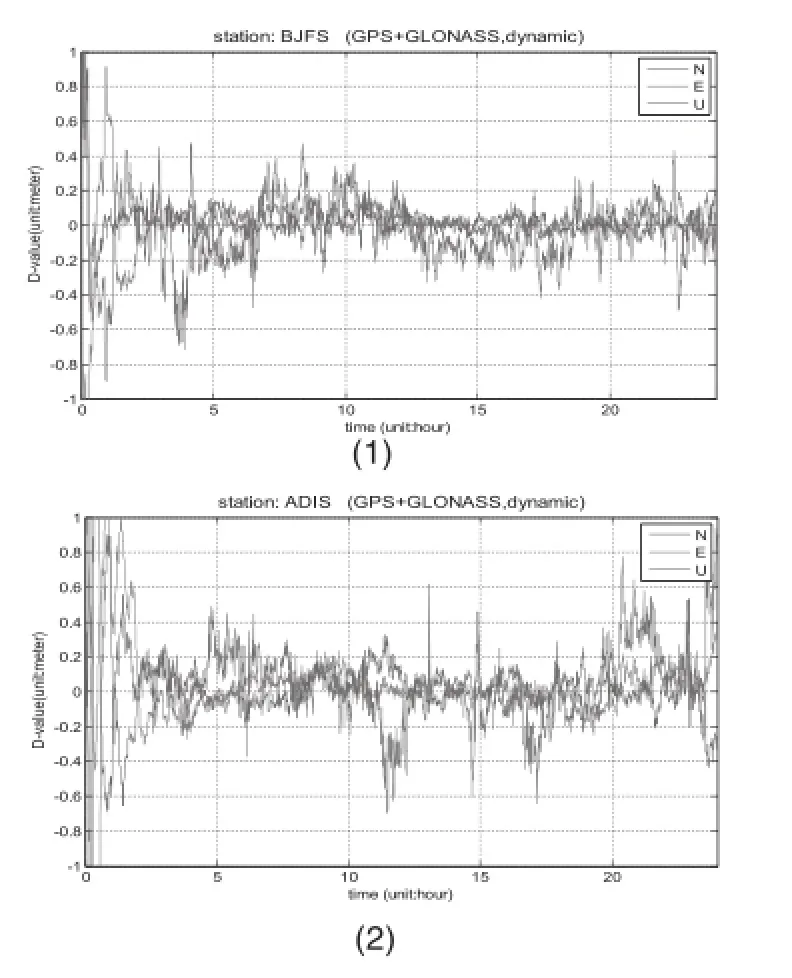
图5GPS/GLONASS组合动态精密单点定位
4结语
本文探讨了精密单点定位在航磁飞艇定位中的应用,通过数据验证可知,静态精密单点定位可以为航磁飞艇基站提供厘米甚至毫米级精度的基准坐标,当无基站的情况下,可以使用动态精密单点定位为航磁飞艇提供分米级精度的坐标。