
Logic-based Reset Adaptation Design for Improving Transient Performance of Nonlinear Systems
2015-08-09 04:54XiaWangandJunZhao
Xia Wang and Jun Zhao
Logic-based Reset Adaptation Design for Improving Transient Performance of Nonlinear Systems
Xia Wang and Jun Zhao
—In this paper,logic-based switching and resetting principles are presented to devise adaptive control laws for a class of uncertain nonlinear systems in order to ensure both the transient bound and the asymptotical convergence of the state.A novel supervisor is constructed to decide when to reset the estimation parameter with the pre-given estimation value.A benchmark example is presented to demonstrate the effectiveness of the approach.
Index Terms—Logic-based switching,reset adaptive law,overadaptation,transient performance,uncertain nonlinear systems.
I.INTRODUCTION
A S is well known,adaptive control is an effective method in dealing with parameter uncertainties of a system[1-2]. Most results of adaptive control only provide boundedness and asymptotic performance of signals.Large transient error may arise in the beginning of a control process.In practical control, however,the boundedness and asymptotic performance is far from being enough to determine the feasibility of a system. Both the steady-state response and the transient response should be taken into account simultaneously in order to control a system successfully.
For this reason,much effort has been made to improve the transient performance of adaptive control[3-5].The most widely known method is the multiple model adaptive control (MMAC)method in which a family of candidate controllers and a supervisor are designed[6-8].The estimators of candidate controllers have different initial values that are evenly distributed over the range of uncertainty,and the supervisor selects the controller whose corresponding estimator has the smallest estimation error.The essence of this method is to ensure that the estimation error is small all the time.As a result,a better transient response comes at the cost of complexity.Simulations have shown the superiority of MMAC over conventional adaptive control,while some basic performance indices,such as the overshoot and rise time,still remain unclear.
Xia Wang is with the State Key Laboratory of Synthetical Automation for Process Industries(Northeastern University),Shenyang 110819,China, and also with the College of Electronic and Information Engineering,Hebei University,Baoding 071002,China(e-mail:wangxiahbu@gmail.com).
Jun Zhao is with the State Key Laboratory of Synthetical Automation for Process Industries(Northeastern University),Shenyang 110819,China(email:zhaojun@mail.neu.edu.cn).
An exponential convergence rate exists for linear adaptive control systems when the input signal is persistently exciting[9-10].In the absence of persistently exciting input signal,however,it is difficult to guarantee any transient bound in adaptive control due to the unknown parameters.In order to characterize the transient behavior of adaptive control more precisely,in recent years,researchers have devoted their efforts to find a decaying bound for the transient period.A few preliminary results have been reported.In[11],the tracking error is contained in a prescribed performance funnel with no asymptotical tracking obtained.By means of transforming the constrained problem into a boundedness problem,asymptotical tracking with a prescribed performance is achieved for strict feedback systems(see[12-14]and the references therein). The strict feedback structure,however,is very special,which limits the application of this method.For a more general system structure in adaptive control,a switching strategy is proposed in[15]to guarantee a transient bound by selecting the right parameter value within a discrete finite set.
Both in MMAC and the approach of[15],switching plays an important role in enhancing control performance.In fact,the idea of using switching to improve the performance of adaptive control can be traced back to[16].The switched controllers make the closed loop adaptive control system a switched system which has been widely studied in recent decades.A switched system is composed of a switching law and a family of subsystems that share a common state.Through splicing the dynamics of different subsystems,the switching signal endows the switched system with properties that its subsystems do not possess.Plenty of analyzing and designing methods have been reported for switched systems[17-21].
On the other hand,reset control is another approach to improve transient behavior and is drawing growing attention in recent years[22-23].Reset controllers are dynamic controllers with reset states.In a way,the reset controller extracts energy from the system and then cut off the energy away by resetting. Thus,a properly designed reset principle can speed up the convergence rate of the control system.Typically,the reset mechanism can overcome the wind-up problem of the integral controller and reduce the overshoot dramatically[24-25].Some preliminary methods on how to design reset principle and guarantee stability have been presented[26-29].Unlike the switched system,the discontinuity of energy is the essence of reset control in enhancing the control performance.With one fixed control law,however,the reset controller cannot obtain new properties as a switched system does.Therefore, we are hopeful to further improve the transient performance of adaptive control via combining the ideas of switching and resetting.
What makes the transient behavior elusive in direct adaptive control(indirect adaptive control)is the interaction betweenthe control error(state estimation error,respectively)and the parameter estimation error.It is generally accepted that a large parameter estimation error tends to increase the control error (state estimation error).On the other hand,the control error (state estimation error)also affects the estimation process. The integral term in an adaptive law is always adjusting the estimate while the control error(state estimation error)is not zero.Therefore,when the control error(state estimation error)is large,the estimate changes fast no matter how small the estimation error is.As a result,the estimate could be driven away far from its ideal value,which is called overadaptation in[30-31],and this deflected estimate of the unknown parameter,in turn,is likely to arouse a growth of the control error(state estimation error).This is why a good initial estimate often ends up with bad transient performance. The over-adaptation is weakened by the methods provided in [30-31]from the standpoint of application,but it is still an open problem on how to avoid over-adaptation mechanically.
To alleviate the effect of control error on adaptation,some information of the unknown parameter is helpful in modifying the adaptive law.For instance,the bound of the uncertainty parameter is used to construct a so called projection adaptive law[32-33].The projection mechanism prevents the estimate from going outside the scope of the unknown parameter and thus achieves a better transient response.It is natural to expect a better control performance with more specific information about the unknown parameter.
One can get a pretty accurate value of the unknown parameter by identifying it beforehand.Numerous methods have been provided to identify the uncertain parameter of a system.Usually,the estimate converges to the real parameter value asymptotically or exponentially,which means that we cannot obtain the accurate estimate within finite time.It is recently claimed in[34]that the real value of the unknown parameter can be calculated within finite time.However,in the presence of disturbances,this identification is also inaccurate. As is discussed above,using this pre-estimate as the initial estimate in adaptive control cannot guarantee a good transient performance although it is pretty close to the real value. If we use this inaccurate pre-estimate without adaptation, asymptotical property would be lost.Inaccurate as the preestimate is,it could be helpful in amending the adaptive law, for instance,to reset the parameter estimate.To the best of our knowledge,no results on reset adaptive control are reported in the published literature.
In this paper,with the pre-estimation given,the resetting and switching strategies are developed for the adaptive control law so that certain transient performance is ensured for the closedloop nonlinear adaptive control system.When it comes to the linear system,exponential decaying rate is ensured by the proposed method.Both the ideas of supervisory control and Lyapunov-like functions are applied in the designing process. The result has three features.Firstly,reset mechanism is involved in adaptive law to ensure the decaying rate.Secondly, for a class of uncertain nonlinear systems,a transient performance is ensured for adaptive control.Finally,the proposed reset adaptive law differs from the projection adaptive law in a way that the parameter estimation error may go beyond its bound even if the bound is known,for the over adaptation could be helpful in some specific conditions and should not be prohibited.
The structure of the paper is as follows.In Section II,we formulate the problem and present some preliminaries.The switched reset adaptive law is presented in Section III.Simulation is given in Section IV.Section V gives the conclusions and future directions of the research.
Notations.Throughout the paper,RXdenotes the X-dimension real space,λmin(·)denotes the minimum eigenvalue of a matrix,λmax(·)denotes the maximum eigenvalue of a matrix,‖·‖denotes the Euclidean norm of a vector,|·|denotes the absolute value of a scalar.
II.PROBLEM FORMULATION AND PRELIMINARIES
A.Problem Formulation and Assumptions
Adaptive control considers systems containing unknown parameters[1-2,10,32]

where x∈Rnand u are the system state and the control input,θ∗∈Rmis the constant unknown parameter vector. Normally,it is demanded that θ∗is a linear parameter in ʊ.An estimationˆθ is used instead of θ∗in the feedback control law u=g(x,ˆθ)according to the certainty-equivalence principle. Thus,an error system is derived with the parameter estimation error contained in the input,and the error system is stable when the estimation error is zero.
From this view point,we directly consider the following nonlinear system

where Φ:[0,∞)→R1×mis a known bounded continuous function with‖Φ(·)‖≤M for some positive constant M, f(x):Rn→Rnand g(x):Rn→Rnare known locally Lipschitz functions satisfying f(0)=0.
The control objective is twofold.Design a switched reset adaptive law for the estimateˆθ in system(2)such that
1)All signals of the closed-loop system are bounded and the system state x converges to zero,i.e.,limt→∞x(t)=0;
2)For a given pre-estimate¯θ with‖¯θ-θ∗‖≤d,d being a constant,a transient boundary is ensured for x.
Remark 1.In traditional adaptive control,to cope with the uncertainties,the adaptive law is designed for the estimation parameterˆθ so that the first objective can be achieved.Here, we concentrate on how to achieve the second objective via resetting the estimation parameter.
Remark 2.The pre-estimate¯θ and d are assumed to be given beforehand.If the unknown parameter belongs to a known compact set Ω,intuitively,we can choose the center of Ω as¯θ in order to minimize d.Otherwise,we can calculate the pre-estimate within finite time using the method proposed in[34].
Remark 3.Actually,Φ(·)is often a function of several arguments subject to time t.Because the bounds of these arguments usually rely on x,all we need is that the continuity of Φ with respect to its arguments if the bound of x is known.
Definition 1[35].A continuous function α:[0,a)→[0,∞) is said to belong to class K if it is strictly increasing and α(0) =0.It is said to belong to class K∞if a=∞and α(r)→∞as r→∞.
Definition 2[35].A continuous function β:[0,a)×[0,∞)→[0,∞)is said to belong to class K L if,for each fixed s,the mapping β(r,s)belongs to class K with respect to r and,foreach fixed r,the mapping β(r,s)is decreasing with respect to s and β(r,s)→0 as s→∞.
The result of this paper is based on the following assumption.
Assumption 1.There exist positive definite functions V1(x), G(x)∈C1and class K∞functions α1(·)and α2(·),such that for all x∈Rn,

It is also assumed that there exists a r>0 so that

holds for all‖x‖>r,where l>1.
Remark 4.Equation(5)is to ensure that f(x)plays a dominating role in the time derivative of V1along system(2).
Remark 5.A special case of(5)is

The condition(3)ensures that we can always find a V1satisfying(6)for a linear system

where A∈Rn×n,B∈Rn.Equation(3)means that the autonomous system of(7),i.e.,

is asymptotically stable.Hence,there exist positive definite matrices P and Q satisfying[36]

Choosing V1(x)=xTP x,G(x)=xTQx and using the fact that g(x)=B lead to

which satisfies(6).
B.Motivation
In order to state our motivation,we first recall the basic idea of traditional adaptive control.Normally,a positive definite function is chosen as the Lyapunov function in the Lyapunovbased design method[1]

Taking the time derivative of(11)into account gives

So,the following adaptive law

and(3)ensure that the time derivative of V along system(2) is

which leads to signal boundedness and state convergence of system(2).
Since V is composed of both x and˜θ,the decrease of V do not indicate the decrease of‖x‖.When the initial value of˜θ is large,‖x‖could become extremely large even if the initial state‖x(t0)‖is zero.This is why one wants to make the initial value ofˆθ close to θ∗.Conversely,a large initial tracking error can also cause a tremendous growth of˜θ,which means that a large estimation error could appear even if the estimate is accurate at the beginning.Therefore,a good initial estimate does not always lead to a good control performance. Now,using an example,we show the drawback of the integral adaptive law.
Consider the state tracking problem of a linear system

The desired state trajectory xmis generated by

Now we design an adaptive controller for(16)such that the tracking error e=xm-x converges to zero,i.e.,limt→∞e(t) =0.
Subtracting(16)from(17)and using the controller
矿石以伟晶岩、云英岩化花岗岩为主,主要由石英和白云母组成,主要矿物成分单一,且分布相对均匀,以原生块状构造矿石最为常见,次生变化微弱,结构构造简单。

we obtain the dynamics of the tracking error

The tracking problem comes down to a convergence problem of the error system(19)which is of form(2).Choose a candidate Lyapunov function

The adaptive law

leads to

which ensures limt→∞e(t)=0.
Obviously,the ideal value ofˆθis-2.Suppose we have a pre-estimated value-1.99 forθ∗.We first use a constant estimate withˆθ≡-1.99 and then we use the adaptive estimation(21)withˆθ(0)=-1.99 in the simulation.The simulation results in Figs.1 and 2 show that the controller with the constant estimation has a better transient performance in spite of the steady state error.The controller with the adaptive estimation,although can ensure asymptotical tracking,causes oscillations in the transient period.This is because,due to the presence of a large initial error,the adaptive law(21)drives the estimateˆθfar away from its ideal value-2,and the deflected estimate in the controller,in turn,causes an increase of the tracking errore.Thus,just like the wind up problem of integral control,oscillations emerge due to the blindness of adaptation. The constant estimation,of course,does not have this problem.

Fig.1.Plots of using a constant estimationˆθ≡-1.99.

Fig.2.Plots of using an adaptive estimation
The first thought is that a proper switching between the nonadaptive controller and the adaptive controller can achieve both good transient performance and asymptotical tracking.More specifically,it is advisable to use the non-adaptive controller while the tracking error is large and switch to the adaptive controller when the tracking error is small enough.
A further consideration of the large error period suggests that turning off the adaptation is not necessary in order to maintain the good transient performance.An adaptive controller could behave better than the non-adaptive one if the estimation does not deviate seriously.Hence,the key problem is how to avoid over-adaptation.Intuitively,if the adaptive controller is doing worse than the non-adaptive one,we have a reason to reset the estimate in the adaptive controller with the value of the pre-estimate.
Thus,here come the problems of where to switch and when to reset,which we are going to discuss in the following section.
III.SWITCHED RESET ADAPTIVE LAW
This section discusses how to improve the transient performance of system(2)while preserving the asymptotical convergence property by using the switched reset adaptive law. We state our result in three parts.First,the pre-estimated value is used for system(2)without adaptation and the transient performance is analyzed.Then,a switched reset adaptive law is proposed by introducing a supervisory variable to achieve both transient bound and asymptotical convergence.Further, we replace Assumption 1 with Assumption 2 in order to obtain an exponentially decaying bound ofx,which ensures that the statexcan reach a definite ball within a finite time and remain inside thereafter.
A.Constant Estimation
It follows from Assumption 1 that

whereBr={x|‖x‖≤r}.
Let∂Br={x|‖x‖=r}be the boundary of the ballBrand lettk-andtk+(k=1,2,...)denote the time instants whenxreaches∂Brfrom outside and inside respectively.
Construct aµ-system

withµ(t0)>V1(x(t0)),whereδis a small positive number, 0<ϵ<1 andSV1(·)is some positive definite function to be chosen later.
A special version of(24)without resetting was used in[15]. Using the positive definiteness ofSV1(·)and applying Lemma 4.4 in[35]give

whereβis a classK Lfunction.



Noticing(23),we have

BecauseS(·)is continuous and positive definite andV1is radially unbounded,one can find a positive definite functionSV1(·)such that

Without loss of generality,we assume‖x0‖>r.Noticing (24),(28)and applying the comparison theory to the time intervals[t0,t1-),[tk+,t(k+1)-),for all x∈RnBr,we obtain

By(4)and(29),we know that

Now,we show the existence of the ball Br′.

Although x may pass across∂Brrepeatedly,we can still find another ball Br′that contains x for all t>t1-.Actually, for all tk+≤t≤t(k+1)-,using(27)and(4),we have

So,x reaches the ball Br′within the finite time T and remains inside for all t≥T.□
Remark 7.For all‖x‖>r,V1<µalso holds for a nonconstant estimateˆθ if‖ˆθ-θ∗‖=‖˜θ‖≤d,which is easy to see from the proof of Theorem 1.
Remark 8.If the pre-estimation is accurate,i.e.,d=0, asymptotical state convergence follows from(26).When d>0,however,the convergence of x cannot be obtained using constant estimation.

B.Switched Reset Adaptive Law
The constant estimate studied in Section III-A,although ensures a transient bound outside the ball Br,cannot achieve asymptotical convergence.On the other hand,a non-constant estimate with adaptation mechanism can achieve asymptotical convergence with no transient bound guaranteed.Is it possible for an adaptive estimation to gain both transient bound and asymptotical convergence?This is what we are about to discuss in this subsection.
In fact,an adaptive estimation has the same transient bound as the constant one if



Thisµ-supervised resetting is effective only when x is outside the ball Br.So,we need to switch back to the conventional adaptation once x goes into the ball Br.
As a result,we get a switched reset adaptive law
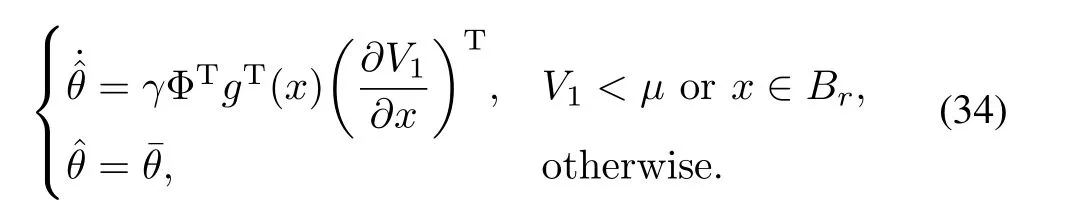
Remark 10.The logic based adaptive law(35)is actually a switched one that is composed of two adaptive laws.One is the supervised reset adaptive law outside the ball Brand the other is the traditional adaptive law inside the ball Br.The switching surface is the boundary of the ball Br.An equivalent expression of(34)is
Theorem 2.For the given pre-estimate¯θ,the switched reset adaptive law(34),when applied to system(2),ensures that
1)Boundedness of all signals and state convergence,i.e., limt→∞x(t)=0;

Proof.We first prove 1).
During the continuous time intervals when no reset occurs, the time derivative of V along system(2)and adaptive law (34)is




Integrating both sides of(36)and using(37)lead to

It follows from Barbalat lemma that limt→∞G(x(t))=0. Thus,limt→∞x(t)=0 follows from the positive definiteness of G(x(t)).
Now,we prove 2).



Remark 11.The number of switching on the switching surface{x|‖x‖=r}is finite.Because limt→∞x(t)=0 guarantees that there exists a finite time T1>0 such that, for all t>T1,we have‖x(t)‖<r.
Remark 13.The transient boundary cannot be defined arbitrarily.The transient boundary of x is deduced based on the fact that V1has a decay rate outside the ball Br.Hence, the transient boundary is related with the Lyapunov function chosen in the design process.
C.Exponential Decaying Bound
A decaying bound of x is given in the previous subsection outside the ball Br.However,no decaying rate is guaranteed. In this subsection,we show how an exponential decaying bound is obtained with the following assumption.
Assumption 2.There exist positive definite functions V1(x), G(x)∈C1and positive constants a,c1,c2and c3,such that for all x∈Rn,
Also,there is a r>0 so that

holds for all‖x‖>r,where l>1.
Remark 14.Equations(40)and(43)here are identical to(3) and(5)in Assumption 1.For the linear system(7),condition (40)means that we can find positive definite matrices P,Q so that A satisfies(9)and(10).Hence,we can choose positive functions V1(x)=xTPx and G(x)=xTQx so that
which satisfies(41),(42)and(43).
Here,we still use tk-and tk+(k=1,2,...)to denote the time instants when x reaches∂Brfrom outside and inside respectively.
Reconstruct theµ-system as

withµ(t0)>V1(t0),where δ is a small positive number and ¯λ is some positive constant to be designed later.
From(45),we have


1)Boundedness of all signals and state convergence,i.e., limt→∞x(t)=0;

Proof.We first prove that V1(x(t))≤µ(t)outside the ball Br,which is discussed in two cases.
The time derivative of V1along system(2)satisfies


Equations(47)and(48)ensures

Noticing(41)and(42),we obtain

for allx∈RnBrandt>t0.
Case 2.No insurance of the condition‖˜θ‖≤d.



In both cases,we haveV1(x(t))≤u(t),x∈RnBr. Therefore,Assumption 2 ensures
Using(53)and(46),for allx(t0)∈RnBr′andt∈[t0,t1-), we have


Now,we turn to prove that‖x‖≤r′for allt>T′.Equation (54)ensures‖x‖keep decaying afterT′untilt1-.From the definition oftk-andtk+,we know that‖x‖≤r<r′for allt∈[tk-,tk+].For the timet∈(tk+,t(k+1)-),(53)and(46) give

Obviously,x(t)remains insideBr′for allt>T′.


IV.SIMULATION
In this section,we illustrate the effectiveness of the proposed method using a water tank shown in Fig.3.The dynamics of the water tank are

wherehis the water level,uis the opening of the inlet valve,kis the coefficient of the inlet valve andθ∗is the unknown parameter.Our purpose is to regulate the water levelhtohr.

Fig.3.Water tank.
Definee=h-hrand let

We have


A.Traditional Adaptive Law

We run the simulation with differentγand the following parameters

The transient responses are shown in Fig.4.Oscillations appear whenγis large due to the over adaptation problem.One may argue that a smallγcan avoid this problem.However, simulation reveals that a smallγresults in a slow response and creeping phenomenon,i.e.,the water level approaches tohrat an intolerably slow speed when the error is small. traditional adaptive law and the switched reset adaptive law respectively.

Fig.4.Water level regulation using traditional adaptive law.
B.Switched Reset Adaptive Law

Using the same parameter as in the simulation of traditional adaptive law,we apply the adaptive law(34)in the simulation withγ=5.The simulation result shown in Fig.5 indicates that the switched reset adaptive law avoids large oscillations and improves the transient behavior.As is seen in Fig.6,using the switched reset adaptive law,the oscillation magnitude of the control input also decreases obviously.
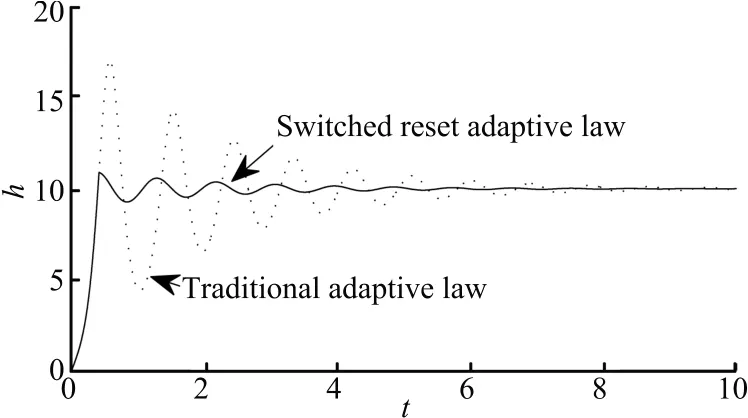
Fig.5.Water level regulation using switched reset adaptive law.
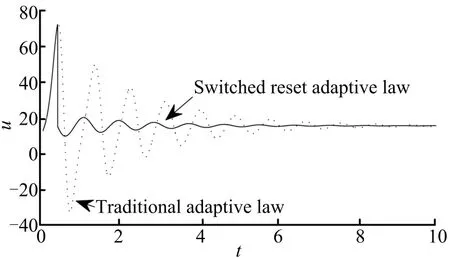
Fig.6.The control input using switched reset adaptive law.
Fig.7 shows the simulation result of switched reset adaptive control withγvarying from 0.01 to 5.It appears that a largerγtends to result in a more rapid response.The resetting mechanism release us from the anxiety of large overshoot. When the adaptation is too slow,the chance of parameter over-adaptation is very small and the resetting mechanism may not be triggered,e.g.,whenγ=0.01 in this example. Even though,we cannot count on slow adaptation in avoiding large overshoots,because the control error also depends on the initial state of the system.

Fig.7.Switched reset adaptive control using differentγ.

V.CONCLUSION
A switched reset adaptive law has been proposed for a class of uncertain nonlinear systems.A known transient bound has been ensured outside a ball with asymptotical convergence reserved.Conditions for exponential decaying bound have been given with specified reaching time to a definite ball.Stability analysis has been provided using Lyapunovlike function.Simulation has been provided to demonstrate the effectiveness of the method.
The transient bound has been shown to exist outside a ball whose size is related to the accuracy of the pre-estimate.If we add an iterative parameter identification mechanism on line,the ball would vanish with the improving identification accuracy,which is our future study.
REFERENCES
[1]Krstic M,Kanellakopoulos I,Kokotovic P V.Nonlinear and Adaptive Control Design.New York:Addison-Wesley,1995.
[2]˚Astr¨om K J,Wittenmark B.Adaptive Control(2nd edition).USA: Addison Wesley,1994.
[3]Cao C Y,Hovakimyan N.Design and analysis of a novelL1adaptive control architecture with guaranteed transient performance.IEEE Transactions on Automatic Control,2008,53(2):586-591
[4]Sun J.A modified model reference adaptive control scheme for improved transient performance.IEEE Transactions on Automatic Control,1993,38(8):1255-1259
[5]Ydstie B E.Transient performance and robustness of direct adaptive control.IEEE Transactions on Automatic Control,1992,37(8):1091-1105
[6]Anderson B D O,Brinsmead T S,De Bruyne F,Hespanha J,Liberzon D,Morse A S.Multiple model adaptive control.Part 1:finite controller coverings.International Journal of Robust and Nonlinear Control,2000,10(11-12):909-929
[7]Hespanha J,Liberzon S,Stephen M A,Anderson B D O,Brinsmead T S,De Bruyne F.Multiple model adaptive control.Part 2:switching.International Journal of Robust and Nonlinear Control,2001,11(5):479-496
[8]Narendra K S,Balakrishnan J.Adaptive control using multiple models.IEEE Transactions on Automatic Control,1997,42(2):171-187
[9]Bayard D S,Spanos J,Rahman Z.A result on exponential tracking error convergence and persistent excitation.IEEE Transactions on Automatic Control,1998,43(9):1334-1338
[10]Ioannou P A,Sun J.Robust Adaptive Control.Upper Saddle River,NJ: Prentice Hall,1996.
[11]Ilchmann A,Ryan E P,Townsend P.Tracking control with prescribed transient behaviour for systems of known relative degree.Systems and Control Letters,2006,55(5):396-406
[12]Bechlioulis C P,Rovithakis G A.Adaptive control with guaranteed transient and steady state tracking error bounds for strict feedback systems.Automatica,2009,45(2):532-538
[13]Bechlioulis C P,Rovithakis G A.A priori guaranteed evolution within the neural network approximation set and robustness expansion via prescribed performance control.IEEE Transactions on Neural Networks and Learning Systems,2012,23(4):669-675
[14]Wang W,Wen C Y.Adaptive actuator failure compensation control of uncertain nonlinear systems with guaranteed transient performance. Automatica,2010,46(12):2082-2091
[15]Liu T F,Hill D J,Wang C.Dissipativity-based switching adaptive control.IEEE Transactions on Automatic Control,2011,56(3):660-665 [16]Fu M Y,Barmish B.Adaptive stabilization of linear systems via switching control.IEEE Transactions on Automatic Control,1986,31(12): 1097-1103
[17]Branicky M S.Multiple Lyapunov functions and other analysis tools for switched and hybrid systems.IEEE Transactions on Automatic Control, 1998,43(4):475-482
[18]Long L J,Zhao J.H∞control of switched nonlinear systems in pnormal form using multiple Lyapunov functions.IEEE Transactions on Automatic Control,2012,57(5):1285-1291
[19]Sun X M,Wang W.Integral input-to-state stability for hybrid delayed systems with unstable continuous dynamics.Automatica,2012,48(9): 2359-2364
[20]Ma R C,Zhao J.Backstepping design for global stabilization of switched nonlinear systems in lower triangular form under arbitrary switchings. Automatica,2010,46(11):1819-1823
[21]Wang R,Liu G P,Wang W,Rees D,Zhao Y B.H∞control for networked predictive control systems based on the switched Lyapunov function method.IEEE Transactions on Industrial Electronics,2010, 57(10):3565-3571
[22]Villaverde A F,Blas A B,Carrasco J,Torrico A B.Reset control for passive bilateral teleoperation.IEEE Transactions on Industrial Electronics, 2011,58(7):3037-3045
[23]Bakkeheim J,Johansen T A,Smogeli O N,Sorensen A J.Lyapunovbased integrator resetting with application to marine thruster control. IEEE Transactions on Control Systems Technology,2008,16(5):908-917
[24]Aangenent W H T M,Witvoet G,Heemels W P M H,van de Molengraft M J G,Steinbuch M.Performance analysis of reset control systems. International Journal of Robust and Nonlinear Control,2010,20(11): 1213-1233
[25]Beker O,Hollot C V,Chait Y.Plant with integrator:an example of reset control overcoming limitations of linear feedback.IEEE Transactions on Automatic Control,2001,46(11):1797-1799
[26]Guo Y Q,Wang Y Y,Xie L H,Zheng J C.Stability analysis and design of reset systems:theory and an application.Automatica,2009,45(2): 492-497
[27]Carrasco J,Banos A,van der Schaft A.A passivity-based approach to reset control systems stability.Systems and Control Letters,2010,59(1): 18-24
[28]Beker O,Hollot C V,Chait Y,Han H.Fundamental properties of reset control systems.Automatica,2004,40(6):905-915
[29]Banos A,Carrasco J,Barreiro A.Reset times-dependent stability of reset control systems.IEEE Transactions on Automatic Control,2011,56(1): 217-223
[30]Feng J E,Tin C,Poon C S.A dual adaptive control theory inspired by Hebbian associative learning.In:Proceedings of the 48th IEEE Conference on Decision and Control.Shanghai,China:IEEE,2009. 4505-4510
[31]Cong B L,Liu X D,Chen Z.Backstepping based adaptive sliding mode control for spacecraft attitude maneuvers.In:Proceedings of the 2012 UKACC International Conference on Control.Cardiff,England:IEEE, 2012.1046-1051
[32]Tao G.Adaptive Control Design and Analysis.Hoboken,New Jersey: Wiley-IEEE Press,2003.
[33]Kuhnen K,Krejc´ı P.An adaptive gradient law with projection for nonsmooth convex boundaries.European Journal of Control,2006,12(6): 606-619
[34]Adetola V,Guay M.Finite-time parameter estimation in adaptive control of nonlinear systems.IEEE Transactions on Automatic Control,2008, 53(3):807-811
[35]Khalil H K.Nonlinear Systems(3rd edition).Upper Saddle River: Prentice Hall,2001.
[36]Zheng D.Linear System Theory.Beijing,China:John Wiley and Sons, 2005.
Xia Wang Professor at Hebei University.She graduated in 2002 and received the M.Sc.degree from Hebei University in 2005.She received the Ph.D. degree from Northeastern University,China,in 2015.Her research interests include switched systems and adaptive control,especially the control of aeroengines and robot manipulators.Corresponding author of this paper.
Jun Zhao Professor at Northeastern University.From February 1998 to February 1999,he was a senior visiting scholar at the Coordinated Science Laboratory,University of Illinois,Urbana-Champaign.From November 2003 to May 2005,he was a research fellow in the Department of Electronic Engineering,City University of Hong Kong,China.His research interests include switched systems,hybrid control,nonlinear systems,and robust control.
t
December 12,2014;accepted May 5,2015.This work was supported by National Natural Science Foundation of China(61403118, 61174073,61233002,11271106),the IAPI Fundamental Research Funds(201 3ZCX03-01),the Natural Science Foundation of Hebei Province(F20152010 88),and the Science and Technology Foundation of Hebei Province(QN20131 056).Recommended by Associate Editor Haibo Ji.
:Xia Wang,Jun Zhao.Logic-based reset adaptation design for improving transient performance of nonlinear systems.IEEE/CAA Journal of Automatica Sinica,2015,2(4):440-448
猜你喜欢
矿产与地质(2022年3期)2022-10-22
岩石学报(2022年7期)2022-08-04
矿产保护与利用(2022年5期)2022-03-28
辽宁科技大学学报(2021年5期)2021-03-03
矿产勘查(2020年7期)2020-12-25
四川地质学报(2020年3期)2020-05-22
华北地质(2020年1期)2020-05-15
成都大学学报(自然科学版)(2018年3期)2018-10-10
硅酸盐通报(2016年5期)2016-10-14
桂林理工大学学报(2016年1期)2016-09-07
 IEEE/CAA Journal of Automatica Sinica2015年4期
IEEE/CAA Journal of Automatica Sinica2015年4期
- IEEE/CAA Journal of Automatica Sinica的其它文章
- A Reduced Reachability Tree for a Class of Unbounded Petri Nets
- Cyber-Physical Systems as General Distributed Parameter Systems:Three Types of Fractional Order Models and Emerging Research Opportunities
- Anti-windup-based Dynamic Controller Synthesis for Lipschitz Systems under Actuator Saturation
- Linguistic Dynamic Modeling and Analysis of Psychological Health State Using Interval Type-2 Fuzzy Sets
- Distributed Model Predictive Control with Actuator Saturation for Markovian Jump Linear System
- A Systematic Approach for Designing Analytical Dynamics and Servo Control of Constrained Mechanical Systems