
一种基于线性化直升机数学模型的仿真系统
2015-08-10 10:30王小青
电子设计工程 2015年15期
王小青,吴 平,包 健
(总参第六十研究所 江苏 南京 210016)
飞行控制系统决定了无人直升机的飞行性能,随着无人直升机性能的不断提高及功能的日益增加,飞行控制系统越来越复杂[1-2]。某型半物理仿真系统是为配合飞行控制系统设计而开发的,主要为直升机飞行动力学模型的验证与评估、飞行控制软件的设计与验证等提供强有力的技术支撑平台。这对于提升飞行控制系统设计的效率、减少设计差错、缩短设计周期及降低设计成本具有重要意义[3]。
1 仿真系统功能
某型半物理仿真系统的主要功能包括:
1)模拟无人直升机从起飞到降落整个飞行过程的全状态,进行全包线仿真;
2)评估验证直升机飞行动力学模型的准确性;
3)模拟无人直升机各个传感系统的报文和动态特性;
4)可接入飞行控制计算机实物、舵机系统和地面站实物(除去电台部分),进行半物理仿真实验。
2 仿真系统结构
根据无人直升机仿真模型获取方式不同,某型半物理仿真系统如图1、图2所示,形成了两种半物理仿真系统结构。
2.1 采用外部模型机的FlightLab直升机模型

图1 采用外部FlightLab直升机模型的仿真系统Fig.1 Simulation system with external helicopter model by FlightLab
如图1所示,该仿真系统由仿真测试设备、模型计算机、舵回路和飞控计算机等组成。其中,与仿真测试设备相配合的还有仿真控制台,与飞控计算机相配合的还有地面站测控软件。
1)仿真测试设备:运行仿真软件,其中主要包括传感器信息模拟软件、舵机信息模拟软件、多功能板信息模拟软件。各个模拟软件之间采用共享内存的方式进行信息交互。主要功能包括:①舵控指令接收解算并转换成4个操纵量作为模型输入信息;②直升机模型接收操纵指令,解算得到飞行状态信息作为传感器输入数据信息;③模拟传感系统的报文和动态特性;④和飞控计算机之间进行网络通信;⑤和模型机之间进行网络通信。
2)模型计算机:运行无人直升机FlightLab仿真模型[4];接收控制输入,并解算得到无人直升机实时状态数据。
3)舵回路:舵机可接实物舵机,也可直接通过仿真测试设备中的舵机信息模拟软件进行模拟。
4)飞控计算机:运行飞行控制软件,接收传感器状态信息以及遥控信息,根据无人直升机当前的飞行状态以及操纵指令解算得到舵机控制指令[5-6]。
5)仿真控制台:运行仿真界面程序,可接受用户界面输入信息,主要实现模型状态量的曲线显示功能,以及各种传感器故障类型仿真、模型运行与重载控制等功能。
6)地面测控计算机:运行地面测控软件,用于对飞行控制计算机发送遥控指令,控制无人直升机的飞行模态,并接收飞行控制计算机的下行数据,显示、记录无人直升机飞行过程和任务设备运行状态。
2.2 采用仿真测试设备内部的线性化模型
如图2所示,该仿真系统由仿真测试设备、飞控计算机和地面站测控软件等组成。其中,仿真测试设备中除了运行传感器信息模拟软件、舵机信息模拟软件、多功能板信息模拟软件,还将运行线性化直升机数学模型模拟软件。相比于2.1节所述的半物理仿真系统,该系统平台搭建简单且携带方便。但是,受到线性化直升机数学模型的精度限制,该系统仅适用于对仿真精度不高的情况。

图2 采用仿真测试设备内部线性化模型的仿真系统Fig.2 Simulation system with internal helicopter model by test-device
3 线性化直升机模型
当进行飞控软件逻辑仿真或者其他对模型精度要求不高的仿真时,常采用仿真机内部的直升机线性模型。其主要优势在于便于快速搭建仿真平台,易于携带(不需要再携带模型机),特别是大大方便在外场调试过程中的仿真工作。
线性化直升机模型主要实现以下功能:接收飞控计算机解算出的控制输入数据;实时运行仿真模型;最后将模型解算得到直升机的相关状态数据反馈给飞控计算机。线性化直升机模型仿真模块的输入输出关系如图3所示。
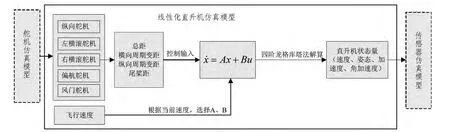
图3 线性化直升机模型输入输出关系Fig.3 Relationship between input and output of helicopter's linear model

图4 直升机机体坐标系Fig.4 Body axis of helicopter
被控对象数学模型建立于机体坐标系,如图4所示。
采用状态空间表达式形式描述,给定被控对象的数学模型为:x˙=Ax+Bu
其中,状态 x=[VxVyVzωxωyωzγ ψ ϑ]T,分别表示直升机纵向速度、垂向速度、横向速度、滚转角速度、偏航角速度、俯仰角速度、滚转角、偏航角和俯仰角;控制输入u=[φ7A1B1φT]T,分别表示旋翼总距、横向周期变距、纵向周期变距和尾桨总距。
状态矩阵A和控制矩阵B通过FlightLab计算得到,且随着无人直升机飞行状态的不同而改变。具体计算过程如下:
1)在FlightLab开发环境下,分别对主旋翼、尾桨、机身、平尾、垂尾、发动机和飞控系统等部件进行建模,并最终综合成一个完整的无人直升机模型;
2)给定一个稳定的飞行状态,通过FlightLab进行模型的线性化和配平计算;
3)通过 FlightLab 计算,分别得到 0 m/s、3 m/s、9 m/s、15 m/s、20 m/s、25 m/s、30 m/s、35 m/s、40 m/s、45 m/s 等稳定飞行状态下的A、B矩阵。
4 仿真过程及结果
基于线性化直升机模型的直升机仿真过程如下:
1)启动各个传感器、舵机、多功能板仿真程序;
2)启动线性化直升机模型仿真程序;
3)启动飞行控制软件程序;
4)通过测控软件,发送飞行控制指令,开始飞行仿真;
5)通过测控软件,显示、记录仿真过程参数;
6)对飞行仿真结果进行参数分析。
以航线飞行仿真为例,其仿真结果如图5~7所示。

图5 航线飞行轨迹Fig.5 Track of route fly

图6 航线飞行高度曲线Fig.6 Altitude curve of route fly
由仿真曲线可知,航线飞行高度100 m,高度控制精度能达到飞行高度的3%,飞行速度16 m/s,速度稳态控制精度能达到±1 m/s。

图7 航线飞行速度曲线Fig.7 Velocity curve of route fly
5 结 论
该仿真系统的建立为无人直升机设计和控制策略的研究提供了试验平台,且方便携带和实际使用操作。实践表明,这套仿真系统可以非常有效地验证飞行控制系统的控制逻辑,直观地验证飞行控制系统控制效果的优劣,为飞控系统的优化设计和系统的性能评估等提供数据支持,具备了较好的工程应用价值。
[1]杨一栋.直升机飞行控制系统[M].北京:国防工业出版社,2007.
[2]文传源.现代飞行控制系统[M].北京:北京航空航天大学出版社,1992.
[3]李石磊,梁加红,刘欣添,等.直升机飞控系统集成仿真平台开发[J].计算机仿真,2010,27(3):64-68.LI Shi-lei,LIANG Jia-hong,LIU Xin-tian,et al.Integrated simulation platform for helicopter flight control system[J].Computer Simulation,2010,27(3):64-68.
[4]He Chengjian.FLIGHTLAB theory manual[R].USA,Mountain View CA:Advanced Rotorcraft Technology Inc,2004.
[5]施晓颖,褚双双.基于VxWorks与RTW Embedded Coder的无人直升机机载飞控软件系统开发[J].电子设计工程,2012,20(4):22-26.SHI Xiao-ying,CHU Shuang-shuang.Design of a flight controlsoftwaresystem basedonVxWorksandRTW Embedded Coder[J].Electronic Design Engineering,2012,20(4):22-26.
[6]杨娟.飞行控制软件的实时性测试[J].微计算机信息,2011,27(7):89-91.YANG Juan.The real-time testing of flight control software[J].Microcomputer Information,2011,27(7):89-91.
猜你喜欢
环球时报(2022-09-15)2022-09-15
小猕猴学习画刊(2022年12期)2022-02-06
中等数学(2020年2期)2020-08-24
自动化学报(2019年6期)2019-07-23
测控技术(2018年9期)2018-11-25
电子制作(2018年1期)2018-04-04
制造业自动化(2017年2期)2017-03-20
北京航空航天大学学报(2016年7期)2016-11-16
光学精密工程(2016年3期)2016-11-07
舰船科学技术(2015年8期)2015-02-27
