
Stewart并联机构姿态奇异与无奇异姿态运动规划
2015-08-19 09:53李保坤郭永存曹毅
安徽理工大学学报·自然科学版 2015年2期
李保坤++郭永存++曹毅

摘 要:以单位四元数为姿态参数,研究Stewart并联机构位于给定位置的姿态奇异并进一步探讨机构的无奇异姿态运动规划方法。基于机构的雅可比矩阵,构建机构给定位置的以单位四元数表征的姿态奇异轨迹的一般符号解析表达式。利用四元代数理论构建刚体姿态运动学方程和时间最优姿态轨迹方程;通过分析机构姿态奇异轨迹分布并利用刚体运动的时间最优姿态轨迹方程,研究机构无奇异时间最优的姿态运动的规划方法。研究成果进一步丰富了Stewart并联机构的奇异规避理论。
关键词:并联机构;姿态奇异;无奇异;姿态运动规划
中图分类号:TP2422 文献标志码:A 文章编号:1672-1098(2015)02-0013-07
--------------------------------------------------------------------------------
收稿日期:2014-11-15
基金项目:国家自然科学基金资助项目(50905075);安徽省自然科学基金资助项目(1308085QE78);安徽理工大学硕博基金资助项目
作者简介:李保坤(1982-),男,安徽舒城人,讲师,博士,主要从事于机构学与机器人技术研究。
Orientation-singularity Representation and Orientation Singularity-Free
Motion Planning Analysis of the Stewart Parallel Mechanism
LI Bao-kun1,2, GUO Yong-cun1, CAO Yi2
(1. School of Mechanical Engineering, Anhui University of Science and Technology, Huainan Anhui 232001, China; 2. School of Mechanical Engineering, Jiangnan University, Wuxi Jiangsu 214122, China)
Abstract:By using the unit quaternion as the orientation parameters, the orientation-singularity for a given position was studied and the method of the orientation-singularity-free motion planning was further explored. Based on the Jacobian matrix of the mechanism, a general symbolic analytical expression describing the orientation-singularity loci based on the quaternion representation for a given position was derived. The orientation kinematic equation and the time optimal orientation trajectory of a rigid body were constructed by using the quaternion algebra theory, respectively. After analyzing the orientation-singularity locus and using the time optimal orientation trajectory of a rigid body, the method of time optimal orientation motion planning of the mechanism was explored. The research achievement enriches the singularity-avoidance of the Stewart parallel mechanism.
Key words:parallel mechanism; orientation-singularity; singularity-free; orientation motion planning
六自由度Stewart并联机构由于刚度大、承载能力强以及运动精度高等特点,已被广泛应用于运动模拟器、医疗器械、工业机器人、微纳操作、力/力矩传感器、空间探测、并联机床等多个高精技术领域[1]。奇异位形严重影响并联机构的运动及力传递性能,对于并联机构来说,若机构处于奇异状态,机构将严重失稳并导致机构失控甚至被损坏。因此,并联机构应位于远离奇异位形的区域工作。得到机构的奇异轨迹是奇异规避研究的基础[2]。文献[3]利用平面几何中的Ceva定理研究三角平台型Stewart并联机构的奇异位形。文献[4]研究了Stewart并联机构姿态固定时的位置奇异轨迹在三维空间内的结构特性。文献[5]以单位四元数为姿态参数,给出了Stewart并联机构奇异轨迹的三维图形描述。文献[6]给出了Stewart机构的奇异轨迹,并进一步给出无奇异工作空间的确定方法。
对于并联机构来说,规避机构的奇异位形的一个重要方法便是通过增加冗余驱动来实现[7-9],但对于具有六自由度的Stewart机构,采用冗余驱动无疑会带来机构控制的复杂性,并且会进一步限制机构的工作空间。文献[10]通过研究并联机构构型分岔特性,提出了一种利用扰动函数来规避并联机构转向点奇异的方法。文献[11-13]提出利用运动规划的方法避开机构的奇异位形。endprint
由文献[14-15]可知,六自由度并联机器人机构动平台的任务空间对应于刚体运动变换群SE(3),相当于三维姿态变换群和三维欧式空间的半直积,即:SE(3)=SO(3)R3。由于对机构位于整个位形参数空间内实施运动规划具有很大的难度,而位于R3上的位置运动规划研究已较为成熟,故本文主要对Stewart并联机构位于SO(3)上的姿态运动规划进行研究。
基于机构的雅可比矩阵,得出机构位于SO(3)上的姿态奇异轨迹,并给出其三维图形描述。基于机构姿态奇异的轨迹描述,研究机构时间最优的无奇异姿态运动规划。
1 机构的三维姿态奇异轨迹描述
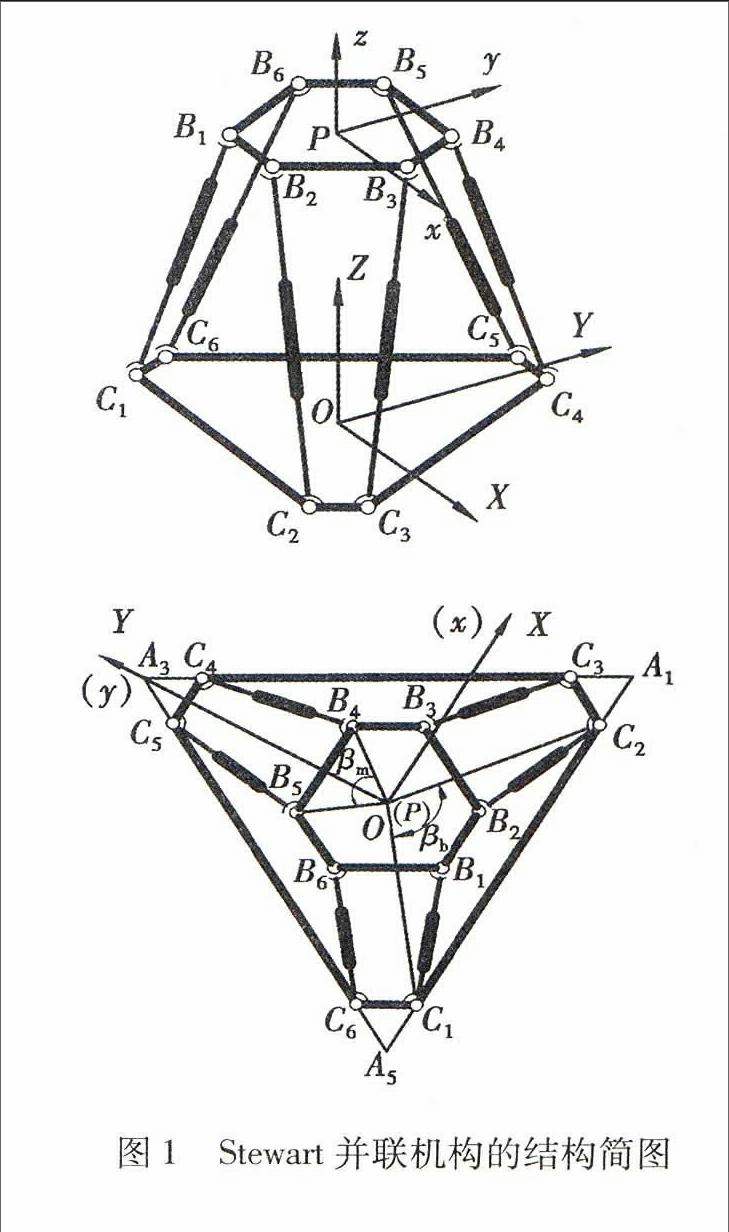
六自由度Stewart并联机构的结构简图如图1所示,其动定平台为两个非相似型的半对称正六边形B1B2…B6,C1C2…C6 (i=1,2,…,6),并通过六根相同的球副-移动副-球副(或万向铰)支链(BiCi)相连。Bi和Ci分别为动定平台的六个顶点,Aj(j=1,3,5)为定平台六边形长边的交点。
P、O、βm、βb、Rm、Rb的含义分别如下:
P为机构动平台几何中心点;O为机构定平台几何中心点;βm为动平台上边B4B5对应中心角,0°≤βm≤120°;βb为定平台上边 C1C2对应中心角,0°≤βb≤120°;Rm为动平台外接圆半径;Rb为定平台外接圆半径。
图1 Stewart并联机构的结构简图
图2 机构位于给定位置的姿态奇异轨迹图2 无奇异姿态运动规划
21 姿态运动轨迹的四元数描述
单位四元数描述刚体的旋转变换也可表示成如下形式
图3 刚体姿态运动学方程的球面弧表示
22 时间最优姿态运动的四元数描述
图4 刚体时间最优姿态运动的球面描述
如图4所示,若使刚体由姿态Λ变换到N,除经M作用的旋转外,亦可经变换ΣP实现。但是,不难发现,由于弧长P与弧长Σ之和一定大于弧长M,也即刚体经姿态变换ΣP所转过的角度要大于姿态变换M所转过的角度。因此,若使刚体从姿态Λ快速变换到N,M所对应的姿态变换应是最短姿态变换路径,由于
若刚体起始姿态Λ=(λ0, λ1, λ2, λ3),目标姿态N=(ν0, ν1, ν2, ν3),计算得到的姿态轨迹Q(t)=(q0,q1,q2,q3),若以四元数的矢量部分作为独立参数,可得到在三维笛卡尔坐标系中的姿态轨迹曲线qi(i=1, 2, 3),称该轨迹曲线即是刚体时间最优姿态运功的姿态轨迹曲线。该轨迹曲线的起始点为(λ1, λ2, λ3),终点为(μ1, μ2, μ3),由四元数运算法则可知,姿态变换轨迹一般情况下应是一条曲线,当且仅当λ与μ共线或其中一个为0时,姿态轨迹为一条连接起始姿态点(λ1, λ2, λ3)到目标姿态点(ν1, ν2, ν3)的直线。
23 机构时间最优的无奇异姿态运动规划
Stewart并联机构动平台的三维姿态变换对应于刚体位于SO(3)上的姿态变换,因此,可将刚体时间最优姿态运动的姿态轨迹求解结果应用于该类型并联机器人机构的基于任务空间描述的时间最优姿态运动规划。但是,如前所述,该类型并联机器人机构存在复杂的奇异位形,而机构在运动过程中应规避奇异位形。若直接将内容21~22的刚体时间最优姿态运动轨迹求解结果应用于机构的时间最优姿态运动规划,则机构的姿态运动路径可能存在奇异点。因此,有必要基于机构位于SO(3)上的姿态奇异研究成果,结合上述刚体时间最优姿态轨迹求解方法,对机构实施时间最优的无奇异姿态运动规划。为便于阐述,现通过数值实例来说明具体操作方法。
数值实例 给定机构构型参数Rb=2、Rm=1、βb=105°、βm=105°,不考虑机构运动副运动范围限制,若机构动平台位于给定位置点(0, 0, 4),若要求机构动平台从起始姿态Λ=(1, 0, 0, 0)经快速旋转作用到目标姿态N=(10/10, 0,-9/10, 3/10),对机构实施时间最优的姿态运动规划。
若不考虑机构位于位置(0, 0, 4)的姿态奇异轨迹影响,由式(7)得到机构快速姿态变换对应的单位四元数为
M=ΝΛ-1=(2/2, 0,-1/2, 1/2)
机构动平台转过的角度为
θ=2arccos μ0=2arccos (2/2)=π/2
将姿态轨迹曲线近似无限小等分成N等份,由式(11)得到动平台姿态轨迹
Q(ti)=[cos (i·Δθ2N)+μsin(i·Δθ2N)]
(1, 0, 0, 0)
(i=0, 1, …, N)
式中:单位方向矢量μj由式(5)得到。
姿态轨迹(q1, q2, q3)中始终有q2=0。得到机构时间最优的姿态运动轨迹Q如图6所示。
图5 刚体姿态轨迹离散化的球面描述
机构力雅可比矩阵的条件数可以定量描述矩阵求逆的精确度和稳定性,也是反映机构位于相应位形时的运动及力传递性能的一个重要指标,可反映机构远离奇异位形的程度。故此处用雅可比矩阵的条件数来描述机构的操作性能随姿态轨迹的变化情况。图7描述了机构雅可比矩阵条件数随图6所示姿态轨迹的变化趋势。
q2
图6 不考虑奇异时的机构时间最优姿态轨迹
q2
图7 不考虑奇异的机构雅可比矩阵条件数变化 从图6与图7可以看出,若根据机构运动起始姿态和目标姿态直接求解时间最优的姿态运动轨迹,机构在运动过程中可能会通过奇异点,而并联机器人机构在实际工作过程中应避开奇异点,因此,有必要使机构在不发生奇异位形的情况下,对机构实施无奇异的姿态运动规划。
综合机构姿态奇异轨迹分布情况,可将机构的姿态运动分为两步:第一步,机构从起始姿态Λ=(1, 0, 0, 0)快速旋转到Qmid=(2/2, 0,-1/2, 1/2);第二步,机构从姿态Qmid快速作用到目标姿态N=(10/10, 0,-9/10, 3/10)。由式(7)得到这两步姿态变换对应的单位四元数分别为endprint
M1=QmidΛ-1=(2/2, 0,-1/2, 1/2)
M2=NQ-1mid=(20/20,3/10,10/20-92/20,32/20-10/20)机构动平台转过的角度分别为
θ1=2arccos (2/2)=π/2
θ2=2arccos (20/20)
对应于动平台的姿态轨迹为
Q1=[cos (i·Δθ12N1)+μ1sin (i·Δθ12N1)]
(1, 0, 0, 0)
(i=0, 1, …, N1)
Q2=[cos(i·Δθ22N2)+μ2sin (i·Δθ22N2)](2/2, 0,-1/2, 1/2)
(i=0, 1, …, N2)
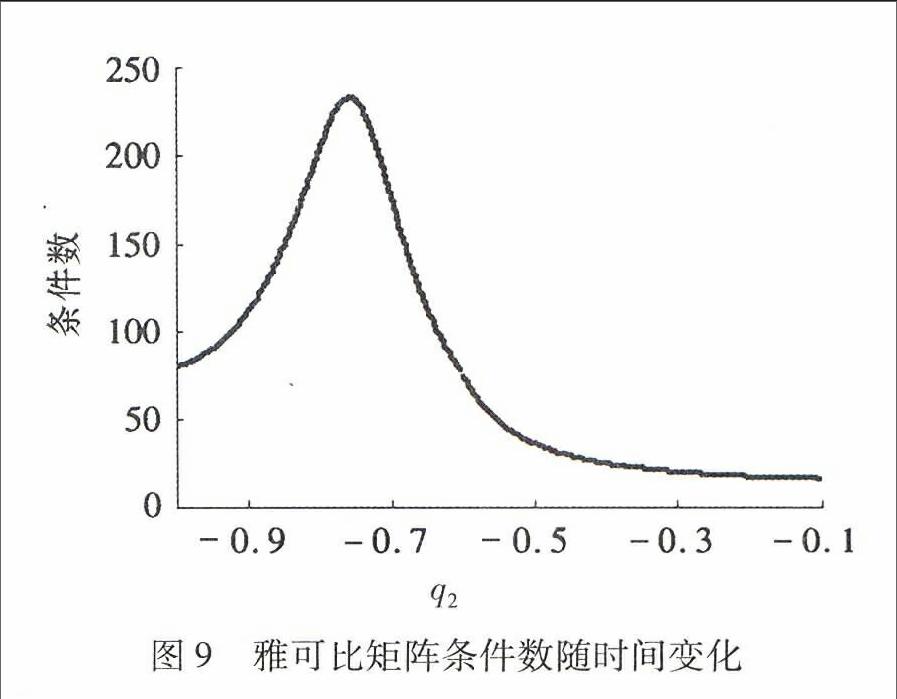
重新规划的无奇异时间最优姿态运动轨迹如图8所示,图9描述了机构雅可比矩阵条件数大小随重新规划后的姿态轨迹的变化趋势。
q2
图8 机构旋转运动的无奇异时间最优姿态轨迹
q2
图9 雅可比矩阵条件数随时间变化
从图8与图9可以看出,重新规划的机构姿态运动轨迹不包含奇异点,该姿态运动轨迹是机构由起始姿态Λ=(1, 0, 0, 0)经快速旋转作用到目标姿态N=(10/10, 0,-9/10, 3/10)的无奇异时间最优姿态运动轨迹。
3 结论
1) 以单位四元数为姿态参数,描述了Stewart并联机构位于给定位置的姿态奇异轨迹,对机构的位于给定位置时的奇异规避研究奠定了前期基础。
2) 基于四元代数运算法则,构建刚体姿态运动学方程,得到刚体运动的时间最优姿态轨迹方程。
3) 综合(1)和(2)研究内容得到Stewart并联机构基于任务空间描述的时间最优的无奇异姿态运动规划方法,其能够确保机构在不会出现奇异位形的条件下,以时间最优为目标运动到目标姿态。
4) 上述无奇异姿态运动规划很大程度上依赖于对机构姿态奇异轨迹分布情况的观察,作者下一步将集中于研究三维姿态空间内的自动搜寻并得到时间最优无奇异姿态运动规划方法。
参考文献:
[1] 黄真,赵永生,赵铁石. 高等空间机构学[M]. 北京: 高等教育出版社,2006:15-200.
[2] JIANG QIMI, GOSSELIN C M. Determination of the maximal singularity-free orientation workspace for the Gough-Stewart platform[J]. Mechanism and Machine Theory,2009,44(6):1 281-1 293.
[3] PENDAR H,MAHNAMA M,ZOHOOR H.Singularity analysis of parallel manipulators using constraint plane method[J]. Mechanism and Machine Theory, 2011,1(46): 33-43.
[4] 李保坤,曹毅,张秋菊,等. Stewart并联机构位置奇异研究[J]. 机械工程学报,2012,48(9):33-4.
[5] 程世利,吴洪涛,王超群,等. 平面平台型Stewart 并联机构的奇异性分析[J]. 机械工程学报,2011,47(9):1-7.
[6] LI BAOKUN,CAO YI,ZHANG QIUJU,et al. Singularity representation and workspace determination of a special class of the Gough-Stewart platforms[J]. International Journal of Advanced Robotic Systems,2013,10(12): 1-13.
[7] SAGLIA J, DAI J S, CALDWELL D G. Geometry and kinematic analysis of a redundantly actuated parallel mechanism that Eliminates Singularity and Improves Dexterity[J]. ASME, Journal of Mechanical Design, 2008, 130(12): 124501-1-5.
[8] 杨建新,余跃庆. 平面三自由度冗余并联机构的驱动奇异性分析[J]. 中国机械工程,2006,17(6):629-632.
[9] 张彦斐,宫金良,高峰. 冗余驱动消除并联机构位形奇异原理[J]. 中国机械工程,2006,17(5):445-448.
[10] 王玉新,李雨桐,潘双夏. 一种规避并联机构转向点奇异问题的新方法[J]. 中国科学E辑:技术科学,2008,38(1): 125-136.
[11] DASH A K, CHEN I, YEO S H, et al. Workspace generation and planning singularity-free path for parallel manipulators. Mechanism and Machine Theory, 2005, 40(7): 776-805.
[12] ARAKELIAN V, BRIOT S, GLAZUNOV V. Improvement of functional performance of spatial parallel manipulators using mechanisms of variable structure[C]//Proceedings of the Twelfth World Congress in Mechanism and Machine Science IFToMM, Besancon, France, June 18-21, 2007: 159-164.
[13] 白志富,陈五一. 并联机构不同正解间无奇异转换问题探讨[J]. 机器人,2006,28(5):463-469.
[14] 于靖军,刘辛军,丁希仑,等. 机器人机构学的数学基础[M]. 北京:机械工业出版社,2008.
[15] (英)SELIG J M. 机器人学的几何基础[M]. 杨向东,译. 北京:清华大学出版社,2008:8-150.
[16] MURRAY R M, LI Z, SASTRY S S. A Mathematical introduction to robotic manipulation[M]. Boca Raton: CRC Press, 1994:10-160.
[17] (苏)B. H. 勃拉涅茨,И. Π. 什梅列夫斯基. 四元数在刚体定位问题中的应用[M]. 梁振和,译. 汪朝群,校.北京:国防工业出版社,1977:7-150.endprint
