化工厂自主巡检用无人车的避障系统设计
2015-09-18 02:32张小宇吕雪艳
中国管理信息化 2015年8期
张小宇,吕雪艳
(1.北京市师达中学,北京 100093;2.北京化工大学,北京 100029)
化工厂自主巡检用无人车的避障系统设计
张小宇1,吕雪艳2
(1.北京市师达中学,北京 100093;2.北京化工大学,北京 100029)
本文设计了用于化工厂自主巡检的无人小车,实现自主避障、有毒有害气体检测、火焰检测和定位报警等功能,可用于化工厂的日常巡检等工作。作为阶段性研究成果,本文报道了基于Arduino平台的六轮车避障系统。系统采用超声波测距模组和红外传感器感知障碍物信息;使用Visual Basic 6.0软件设计了上位机控制界面,控制小车运动;利用网络摄像头监视现场环境。实验验证了在上位机控制下,系统能够自主完成避障任务。实验结果表明,该避障系统软件和硬件部分配合良好,系统设计可行。
Arduino;Visual Basic;六轮车;避障;网络摄像头
智能小车是一种四轮或六轮驱动的智能机器人,属于移动机器人的一种,涉及机械、汽车、电子、自动控制、计算机以及传感技术等多学科知识领域,可以完成危险环境下的探查、侦察、救灾和排爆等工作[1]。与普通机器人相比,智能小车行动灵活、操作方便、研究成本较低,特别是可在人类无法工作的恶劣环境中进行相应的工作。
国内外学者对移动机器人及其避障进行了不同的研究。张洪[2]等提出一种基于多超声波传感器的信息处理算法通过该算法计算得到的小车运动空间安全区域能为自主避障提供有效的信息;强彦[3]等设计了基于双路交叉红外探测的智能避障系统解决了红外避障点缺陷问题;朱向庆[4]等采用反向型光电探测器探测行驶路径结合无线通信模块及VB软件设了基于语音控制的自主循迹与避障智能小车;陈超[5]等以导盲机器人为载体设计了一种超高频和低频RFID相结合的定位与导航方法,可以减少避障传感器在拐点处的多余及错误动作;李磊[6]等通过超声波传感器感知车辆行驶环境,实现了模型小车的自适应巡航、避障等功能;Yeounggwang Ji[7]等设计了一种面向残疾人的智能轮椅,该轮椅具有用户意图识别、障碍物检测及避障、态势感知三重功能;Suman Deb[8]等设计了一种自主导航智能车,该车通过USB与计算机通讯,车上载有一个光学传感器和网络摄像头,可用于军事侦察、消防系统、远程自主探测以及家庭安保。
本文以化工厂自主巡检的无人小车研究课题为基础,重点介绍了以六轮车为智能小车自律控制模型和算法,基于Arduino控制器设计了一种避障系统。该系统通过超声波测距模组和红外传感器检测环境障碍物信息,实现了自主避障。为了更好地控制小车的运动,使用Visual Basic 6.0设计了上位机控制界面,并结合网络摄像头实现了对小车运动监控。
1 系统硬件介绍
本文设计的避障系统主要由以下几部分构成:Arduino驱动/控制器、无线数传模块、超声波测距模组、红外传感器、网络摄像头、电源和六轮车。

图1 系统结构框图
图1是系统结构框图。Arduino驱动/控制器接收计算机控制命令控制小车运动并通过无线数传模块将传感器检测信息返回给计算机;超声波测距模组和红外传感器直接连接在Arduino板上,将检测信息返回到控制器;无线数传模块一端与控制器相连,另一端与计算机相连,用于计算机与控制器之间的串口通讯;网络摄像头将现场视频通过无限网络返回给计算机。
2 程序设计
避障程序分为上位机控制界面设计和下位机程序设计两部分。在上位机控制下,小车执行控制器中的程序,并实时返回距离信息。系统流程图如图2所示。
整个避障过程如下所述:程序初始化后,超声波模组和红外传感器开始检测,控制器接收到连续运动指令(“x”),执行避障程序。
①如果前方障碍物大于40 cm,小车继续前进;
②如果前方障碍物小于40 cm,则执行预定避障程序,即先停止,再判断左右障碍物情况;
③如果右侧没有障碍物则右转,否则,判断左侧有无障碍物,没有障碍物则左转,否则后退一步。循环执行③,直到一侧没有障碍物转向为止;
④在新的位置上,程序重新从①开始循环执行,直到结束为止。

图2 程序流程图
2.1上位机控制界面设计[9]
Visual Basic(VB)是一种窗口操作平台上的视觉开发工具,适于设计程序界面。本系统采用VB 6.0进行上位机控制界面的设计和编程,利用其中的ActiveX控件MSComm实现计算机与控制器间的串行通讯。上位机控制界面主要由控制命令及距离显示部分组成,实现对小车的控制及实时显示返回距离。控制命令包括手动控制命令和连续自动控制命令。上位机控制界面如图3所示。其中,距离返回和显示子程序介绍如下:
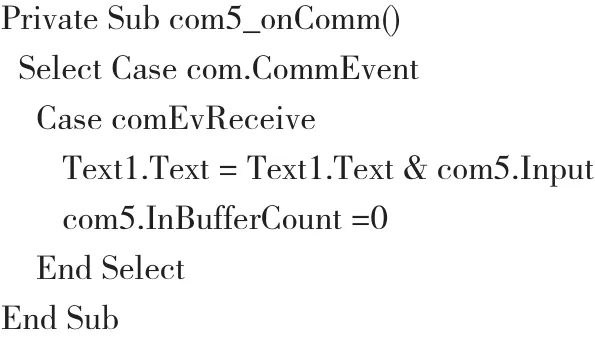
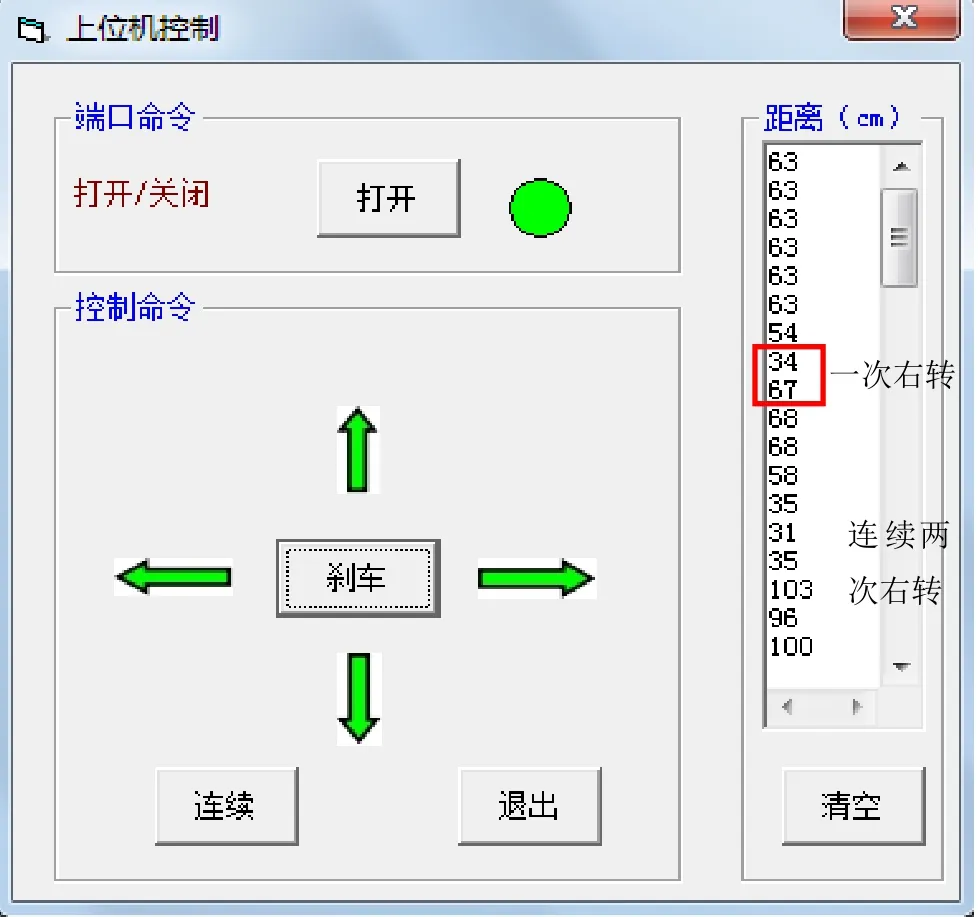
图3 上位机控制界面
2.2下位机程序设计[ 10-11]
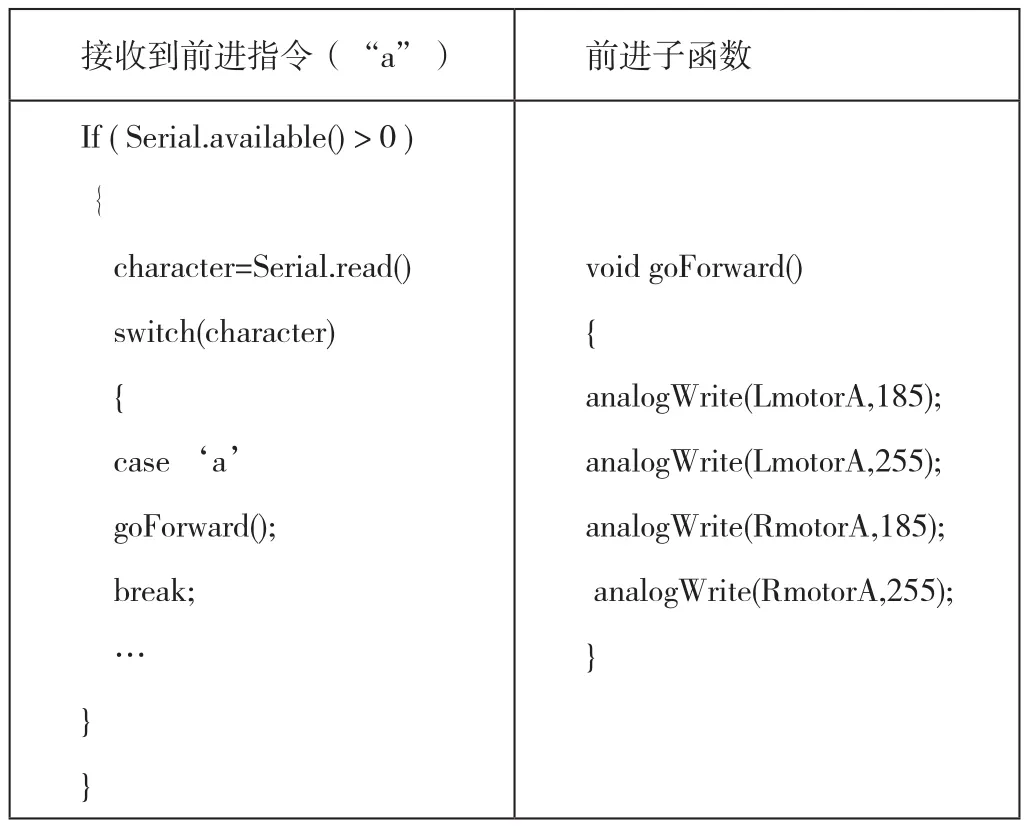
下位机程序是在Arduino IDE(集成开发环境)中编写的,主要包括超声波模组测距、红外传感器检测、串口指令接收、电机动作执行。小车电机的速度采用脉宽调制技术(PWM),通过analogWrite函数实现。以前进动作为例,其子程序代码介绍如下。
3 实验测试
实验环境是自行搭建的曲折通道,完成了测距、避障功能。实验测试图如图4所示。

图4 实验测试图
图4是小车连续自主避障过程的视频连拍图:(a)为小车接收到连续前进指令后前进;(b)前方障碍物小于40 cm时停止;(c)右转90°,前方障碍物大于40 cm,前进;(d)前方障碍物小于40 cm右转90°;(e)前方障碍物小于40 cm,右转90°;(f)前方障碍物大于40 cm,前进;(g)前方障碍物小于40cm,右转90°;(h)、(i)前方障碍物小于40 cm停止。
对照图3(a)~图3(e)与图4中实时距离返回值,从63 cm减小到34 cm的过程,即小车开始驶向障碍物的过程;从34 cm突变到67 cm,即小车在遇到障碍物后自主避障,右转90°;从67 cm减小到31 cm的过程,即小车驶向下一个障碍物;31 cm突变到35 cm,即小车右转后检测到新的障碍物;小车继续右转,检测到下一个障碍物距离为103 cm,小车前进。实验效果与预期的设计目的相符,实现了设计目的。
摄像头返回视频界面如图5所示,摄像头通过无限网络将视频信息返回到计算机,实现对运动现场的监视;摄像头角度可以调节,实现对环境全方位的监视;当检测到物体移动时,会发生移动报警并开启报警录像功能。图5为小车开始运动前返回的的视频画面。

图5 摄像头视频采集界面
4 结 语
本文报道了用于化工厂自主巡检的无人小车的阶段性研究成果,即六轮车避障系统。该系统充分发挥了Visual Basic良好的界面设计功能和Arduino程序设计简单、高效的特点。在上位机控制下,系统能够执行下位机程序,采用超声波测距模组及红外传感器测距和避障,并实时返回距离信息,最终实现自主避障功能;通过网络摄像头返回视频信息,实现对小车运动环境的监视。实验结果表明该避障系统能够有效地处理环境障碍物信息,完成了自主避障任务,验证了所设计的六轮车避障系统的可行性。下一步的主要工作将主要集中在传感器信号采集和综合信息分析方面,实现化工厂自主巡检无人小车的实用化。
主要参考文献
[1]朱坚民,李付才,李海伟,等.轮腿式爬楼梯移动机器人的设计及运动特性分析[J].中国机械工程,2013,24(20):2722-2729.
[2]张洪,钱胜,陈路.多传感器在确定智能小车安全区域中的应用[J].传感器与微系统,2013,32(12):145-148.
[3]强彦,叶文鹏,屈明月,等.基于红外避障的智能小车的设计[J].微电子学与计算机,2013,30(2):140-143.
[4]朱向庆,陈志雄.一种语音控制的自主循迹与避障智能小车设计[J].计算机测量与控制,2011,19(7):1674-1677.
[5]陈超,靳祖光,唐坚.一种超高频与低频RFID相结合的导盲机器人定位与导航方法[J].中国机械工程,2014,25(8):1059-1064.
[6]李磊,曹生炜.智能小车避障技术的实现.微电机,2011,44(6):109-111.
[7] Ji Yeounggwang,Ji hye Hwang,Eun Yi Kim.An Intelligent Wheelchair Using Situation Awareness and Obstacle Detection[J].Procedia-Social and Behavioral Sciences,2013(97):620-628.
[8]Suman Deb,Ria Bhattacharjee,Bibekjyouti Deroy.Low Cost Versatile Artonomous Vehicle With Intelligent Control System[J].Procedia Engineeing,2012(41):965-970.
[9]张传伟,刘庚.硅锰炉自动配料系统[J].仪表技术与传感器,2012(10):65-66,69.
[10]赵津,朱三超.基于Arduino单片机的智能避障小车设计[J].自动化与仪表,2013(5):1-4.
[11]隋秀梅,林源,赵丽.基于HT46R24单片机的智能机器人控制系统[J].制造业自动化,2010,32(3):57-59.
10.3969/j.issn.1673 - 0194.2015.08.114
TP242
A
1673-0194(2015)08-0147-03
2015-02-17
猜你喜欢
中国人民公安大学学报(自然科学版)(2020年4期)2021-01-07
动漫界·幼教365(中班)(2020年3期)2020-04-20
铁道通信信号(2020年9期)2020-02-06
车迷(2018年12期)2018-07-26
中国老区建设(2016年3期)2017-01-15
山东工业技术(2016年15期)2016-12-01
汽车文摘(2015年11期)2015-12-02
学习月刊(2015年3期)2015-07-09
城市道桥与防洪(2014年5期)2014-02-27