数码迷彩自动涂装系统研究
2015-09-18 03:40谢卫周志勇蔡云骧穆景阳总装备部工程兵科研一所江苏无锡214035
兵工学报 2015年12期
谢卫,周志勇,蔡云骧,穆景阳(总装备部工程兵科研一所,江苏无锡214035)
数码迷彩自动涂装系统研究
谢卫,周志勇,蔡云骧,穆景阳
(总装备部工程兵科研一所,江苏无锡214035)
数码迷彩是一种新的迷彩伪装技术,具有较好的伪装效果。针对目前人工涂装效率较低的问题,通过解决装备三维正方形网格模型构建、三维数码迷彩图案模型生成、图案喷涂路径自动规划、喷枪位姿实时检测等问题,构建了数码迷彩自动涂装系统,实现了目标数码迷彩自动喷涂作业。试验结果表明:使用自动作业方式可有效提高数码迷彩喷涂效率,从而推动码迷彩技术进一步发展。
兵器科学与技术;伪装;数码迷彩;机器人;三维建模;指令生成;迷彩设计
0 引言
信息化战争条件下,高技术侦察和精确打击对各类军事目标构成严重威胁。伪装是防敌侦察和精确打击的重要手段,积极采取各种伪装措施,可有效地隐蔽目标,欺骗、迷惑敌方侦察,减少目标被发现识别和探测打击的概率,提高作战力量的战场生存能力。迷彩伪装技术是一种最基本、最常用的伪装方式,各国都十分重视,将迷彩作为提升武器装备战场生存能力的基础和必要措施[1]。面对高分辨率侦察的“矛”的挑战,迷彩伪装技术作为“盾”,必须向精确化、自动化、智能化的方向发展。当前,综合集成计算机、自动控制、机器人等技术实现迷彩作业装备精确设计与自动作业能力已成为国内外发展趋势。数码迷彩是一种根据人类视觉系统特点,广泛借助计算机及图像技术,采用规则的最小可分辨色块,进行排列组合生成的一种能在不同分辨率下和背景特征相匹配的迷彩图案[2]。数码迷彩的技术内涵符合伪装技术发展新趋势,其“马赛克”的图案特点能够从宏观和微观两个层面更好的模拟背景纹理特征,具有更佳的伪装效果,同时也与机器人自动喷涂易于实现规则图形的特点相吻合。
本文针对数码迷彩人工涂装效率较低的问题,分析了基于喷涂机器人的数码迷彩自动涂装系统原理和性能特点,并通过喷涂试验验证了相关技术的可行性,该系统能有效提高数码迷彩喷涂效率,对数码迷彩技术进一步推广应用与发展具有重要意义。
1 系统组成
自动涂装系统组成如图1所示。

图1 系统组成Fig.1 The system composition
图1中,喷涂机器人是实施自动涂装作业的执行机构,选用瑞士ABB公司生产的IRB 5400-14喷涂机器人,同专用直线导轨构成七轴联动整体,由配套控制柜驱动与控制。自动喷涂设备包括自动喷枪、喷嘴、涂料供给泵及配套管线,选用美国固瑞克公司产品。目标数据采集装置安装于机器人手臂末端,选用德国PMD公司生产的CamCube 3.0深度相机,由机器人带动完成目标外形数据扫描,所获数据作为目标建模数据输入。喷枪位姿检测设备安装于机器人手臂末端,用来检测喷涂过程中喷枪与待喷面的相对位置,一定程度上可弥补目标建模误差,改善涂装质量。PC上位机及软件模块作为喷涂作业的控制中枢,通过模型构建模块、图案设计模块、指令生成模块实现数据的接收、处理、反馈。
2 目标数据采集
三维数据测量方法主要有接触式测量、非接触测量和逐层扫描测量3类[4]。逐层扫描方法属于破坏性测量,主要用于医学领域[5];接触式测量方法具有较高精度,但是测量速度慢;非接触式三维数据获取方法主要有激光测距法和基于视觉系统的方法。基于视觉系统的方法成本较低、使用方便,但测量精度易受光照条件影响[6]。基于激光测距的方法测量速度快,精度较高[7]。其中,基于飞行时间的深度相机,主要通过向目标发送连续光脉冲,然后用传感器接收从物体返回的光,通过探测光脉冲的飞行时间来得到目标物距离[8],可获取景物的灰阶影像信息及深度信息,逐渐在科研和工业领域广泛应用。本系统将PMD公司的CamCube3.0深度相机安装于机器人手臂末端,开发USB通信接口与PC上位机相联,组建目标外形数据采集装置,两侧的数据采集装置分别完成各侧目标部分数据的快速获取。采集装置如图2所示。

图2 CamCube 3.0深度相机Fig.2 CamCube 3.0 depth camera
3 目标快速建模
典型目标建模方法是对散乱数据点云进行三角化,建立三角网格模型,在此基础上进行曲面细分,从而得到曲面造型[9-11]。其优点是可通过三角网格灵活反映实际曲面复杂的形貌,获取的曲面模型可以用于复杂产品模型精确表示和数控加工。精简后的装备点云数据可达数百万,甚至上千万,采用三角化方法获得的三角网格数目通常是点云个数的2倍,在海量三角网格上再做细分曲面处理的工作量巨大,处理时效性低,不能满足目标快速建模的要求。另一方面,由于规则四边形更易于喷涂实现,组成数码迷彩图案的基本单元一般为正方形,因此,本系统采用基于包围盒面片生长的目标四边形网格建模方法[12],其主要流程如图3所示。
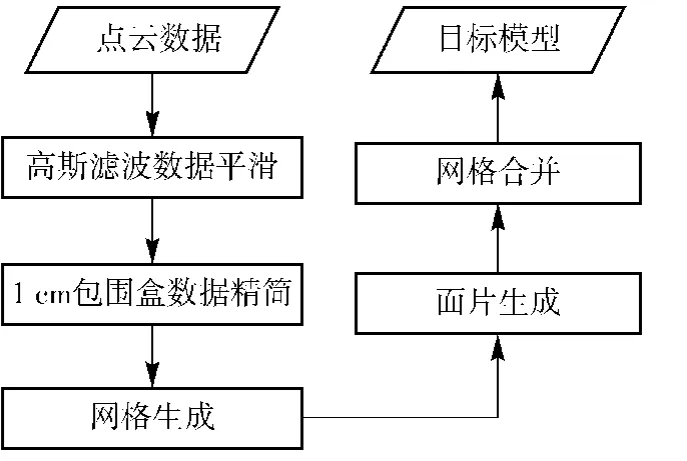
图3 目标建模流程Fig.3 The objectmodeling process
步骤1 采用标准高斯滤波方法平滑点云数据。
步骤2 用最小包围盒法划分点云数据(设盒边长为1 cm),采用加权平均法计算各盒内代表点。
步骤3 按照先面相邻、后边相邻的优先级顺序连接相邻包围盒代表点,得到多边形网格。
步骤4 通过区域生长法将步骤3得到的小尺寸网格合并为10 cm边长的大尺寸网格。
步骤5 采用合适的数据结构将四边形网格封装为面片(包括面片顶点、法向量等信息)。
步骤6 以多边形文本存储标准格式文件输出模型。
4 三维数码迷彩设计
目前,数码迷彩的图案设计方法主要分为两类:1)借助AutoCAD等辅助软件人工设计;2)基于随机场分布、小波重构、分形和聚类等算法自动生成数码迷彩[13-15]。上述方法的设计输出均为二维平面图案,一般出图后经人工喷涂至目标表面,效率低、误差大,较难将迷彩图案快速转换自动喷涂指令。因此,本系统采用纹理映射法实现了三维迷彩图案生成,主要流程如图4所示。
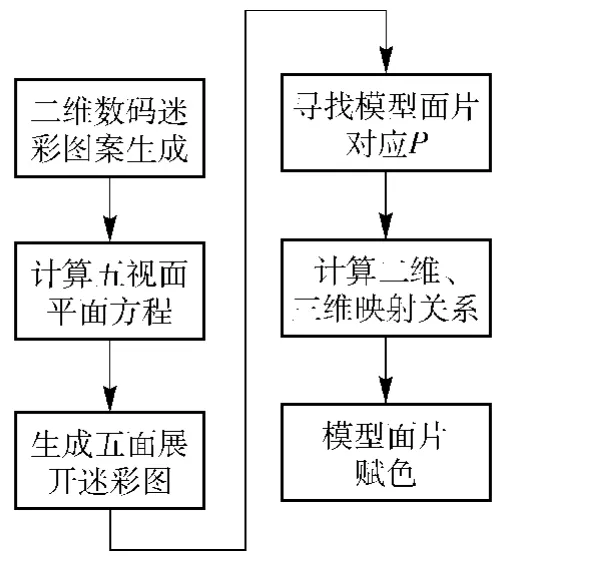
图4 三维数码迷彩图案生成流程Fig.4 The generation process of 3D digital pattern
步骤1 采用K均值聚类方法提取背景颜色特征,基于马尔科夫随机场的方法生成符合背景纹理特征的二维数码迷彩图案[14],构建图案数据库。二维数码迷彩图案生成流程如图5所示。
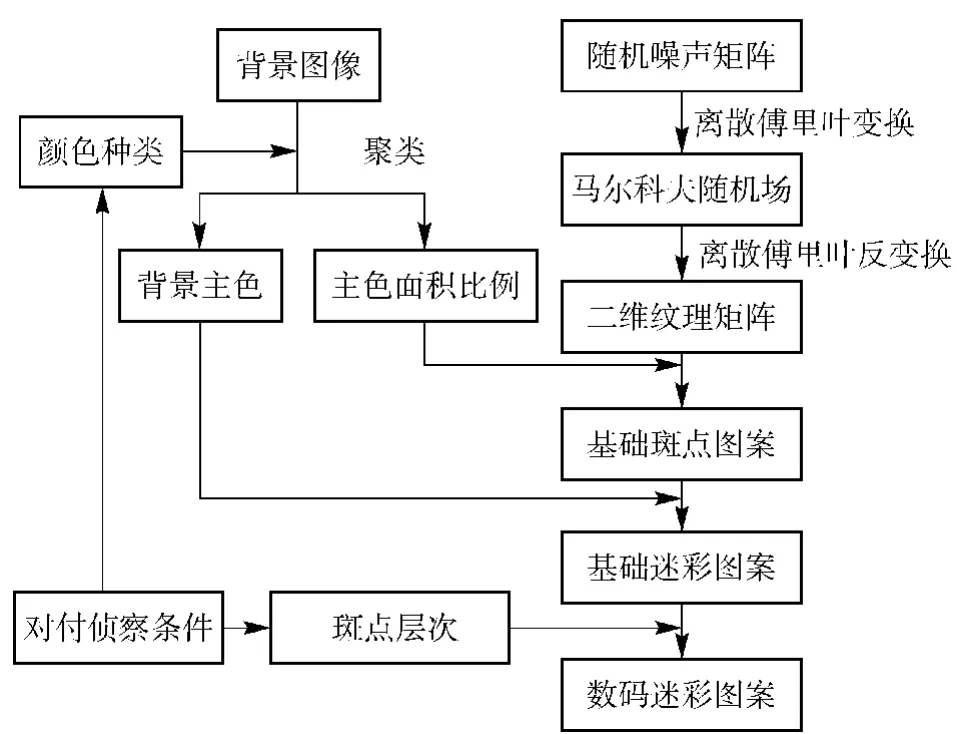
图5 二维数码迷彩图案生成流程Fig.5 The Generation process of2D digital pattern
步骤2 根据目标最小外接立方体计算前、后、左、右、顶5个视面的平面方程。
步骤3 由目标外接矩立方体计算目标五面展开图尺寸,从图案数据库选取图案,随机生成目标数码迷彩五面展开图。
步骤4 计算模型面片同目标5个视面的法矢量夹角,将夹角最小的视面记为P.
步骤5 计算模型面片中心点坐标和各面片在P上投影位置坐标,以此建立模型面片和二维数码迷彩图案的映射关系。
步骤6 根据映射关系,完成三维模型赋色。
5 喷涂指令自动生成
目前,自动喷涂作业实现多是基于机器人示教编程方法,由专业技术人员借助示教器控制机器人完成喷涂图案的轨迹设计,利用示教器存储机器人手臂末端位置及姿态等信息,以此形成机器人喷涂指令。喷涂作业时,调用预先存储的指令,完成自动作业[16]。该方式效率较低,且要求操作人员具备熟练技术和丰富实践经验,不能满足数码迷彩涂装的要求。因此,本系统通过自动编程和离线仿真等步骤实现了一种可以自动生成喷涂作业指令的方法[17],主要流程如图6所示。

图6 喷涂指令生成流程Fig.6 Generation process of spray instructions
步骤1 导入装备三维数码迷彩图案数据。
步骤2 根据作业空间和迷彩图案信息将装备喷涂区域自动划分为多个子区域[18]。
步骤3 执行区域内面片排序和喷涂路径规划,完成机器臂末端姿态及开关枪时间的计算。
步骤4 计算装备的安全外包执行区域间喷涂路径规划。
步骤5 依据机器人编程语言语法生成喷涂指令。
步骤6 在配套离线仿真软件robortstudio中进行仿真喷涂,去除碰撞、不可达等奇异点,修改喷涂指令,对于此部分斑点,采用人工修补的方式进行涂装。
步骤7 将指令下载至机器人控制柜。
6 试验过程
为验证本系统实用性与有效性,对某型装备目标1:1模型进行了自动喷涂作业试验。
通过人工示教方式确定若干起始位置,自动插值生成目标外形数据采集的机器人路径,形成指令,由机器人带动目标数据采集装置完成喷涂目标的外形点云数据采集,经过174个采集点,共采集得到3 874 187个点云数据,采集时间小于20 min,目标点云数据如图7所示。
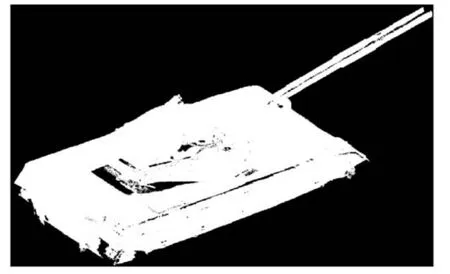
图7 目标点云数据Fig.7 The point cloud data of target
PC上位机通过USB接口获取采集得到的点云数据,由模型构建软件模块完成目标快速建模,所得网格模型包含3 509个有效四边形面片,建模时间小于15min,目标网格模型如图8所示。
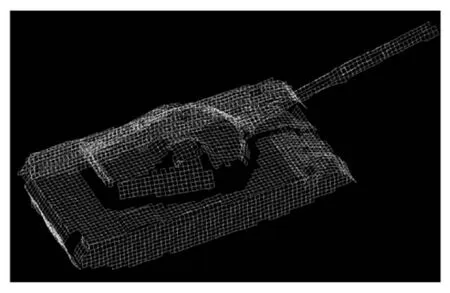
图8 目标网格模型Fig.8 Themesh model of target
运行图案设计软件模块,在三维网格模型上快速完成数码迷彩图案设计生成,设计时间小于5min,目标三维数码迷彩效果如图9所示。

图9 目标数码迷彩图案Fig.9 The 3D digital pattern of target
运行指令生成软件模块,根据三维数码迷彩图案模型,结合预先确定的喷涂工艺参数,完成喷涂路径规划和指令生成,并通过离线仿真喷涂完成指令修正。图10、图11分别为喷涂区域分割和指令生成。
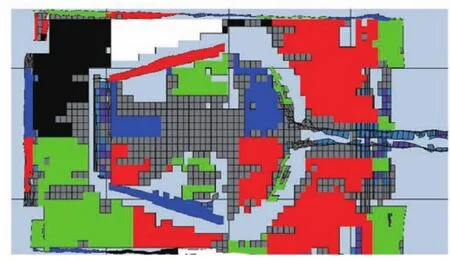
图10 目标喷涂区域规划Fig.10 Spray regional planning of target

图11 目标喷涂指令生成Fig.11 Spray instruction generation of target
最后,将喷涂指令下载至机器人控制器,实施目标自动涂装作业,图12为数码迷彩自动喷涂。

图12 目标自动喷涂作业Fig.12 Automatic spraying operation of target
7 结论
通过解决装备三维正方形网格模型构建、三维数码迷彩图案模型生成、图案喷涂路径自动规划、喷枪位姿实时检测等关键技术问题,构建了数码迷彩自动涂装系统,可实施坦克模型的数码迷彩自动化涂装,涂装时间不超过30min.但该系统存在两个不足:1)在装备外形数据采集时,需要通过人工示教确定机器人采集点路径指令程序;2)在装备三维网格模型构建与图案设计时,需要一定的人工交互过程,这都增加了系统操作难度、降低了作业效率。下一步研究重点是开展喷涂作业数据库构建,采取离线作业的方式完成数据采集、建模、图案设计、指令生成等过程,实现自动喷涂作业流程的高效化。
(References)
[1]胡江华.伪装技术[M].北京:国防工业出版社,2014:1-5. HU Jiang-hua.Camouflage technology[M].Beijing:National Defense Industry Press,2014:1-5.(in Chinese)
[2]Zhang Y,Xue SQ,Jiang X J,etal.The spatial colormixingmodel of digital camouflage pattern[J].Defence Technology,2013,9(3):157-161.
[3]崔宝生,邹南智.红外伪装效果仿真检测方法研究[J].激光与红外,2000(1):62-64. CUIBao-sheng,ZOU Nan-zhi.Study on infrared effect simulation measurement of camouflage equipment[J].Laser&Infrared,2000(1):62-64.(in Chinese)
[4]付丽琴,陈树越.反求工程中的实的数据获取技术[J].测试技术学报,2001,15(4):248-252. FU Li-qin,CHEN Shu-yue.Object data acquisition in reverse engineering[J].Journalof Testand Measurement Technology,2001,15(4):248-252.(in Chinese)
[5]任雅萍,杨玉孝,赵明涛,等.层析式三维激光测量技术[J].激光与红外,1997,27(4):226-227. REN Ya-ping,YANG Yu-xiao,ZHAOMing-tao,etal.Laser threedimensionalmeasuring technique by cutting layer[J].Laser&Infrared,1997,27(4):226-227.(in Chinese)
[6]邓志东,牛建军,张竞丹.基于立体视觉的三维建模方法[J].系统仿真学报,2007(7):3258-3262. DENG Zhi-dong,NIU Jian-jun,ZHANG Jing-dan.Three-dimensionalmodeling approach based on stereo vision[J].Journal of System Simulation,2007(7):3258-3262.(in Chinese)
[7]Hong T,Chang T,Rasmussen C,et al.Feature detection and tracking formobile robotsusing a combination of LADAR and color images[C]∥IEEE Conference on Robotics and Automation.US:IEEE,2002:4340-4345.
[8]Borenstein J,Everett H R,Feng L,et al.Mobile root positioning:sensors and techniques[J].Journal of Robotic Systems,1997(14):231-249.
[9]Carlos A F.A comparison of three TIN surfacemodelingmethods and associated algorithms[J].NCGIA,1995,12(12):116-121. [10]Tsai V JD.Delaunay triangulations in TIN creations:a-n overview and a linear-time algorithm[J].International Journal of Geographical Information Systems,1993,7(10):42-49.
[11]Lo S H.Delaunay triangulation of non-convex planar domains [J].International Journal for Numerical Methods in Engineering,1989,28(11):2695-2707.
[12]Chai X J,Wen F,Cao XW,etal.A fast3D surface reconstruction method for spraying robot with time-of-flight camera[C]∥Proceedings of the IEEE International Conference on Mechatronics and Automation.US:ICMA,2013:57-62.
[13]喻钧,杨武侠.数码迷彩的生成算法[J].光电工程,2010,37(11):110-114. YU Jun,YANGWu-xia.Research of digital camouflage generation algorithm[J].Opto-Electronic Engineering,2010,37(11):110-114.(in Chinese)
[14]徐英.基于背景代表色提取的迷彩伪装颜色选取算法[J].光电工程,2007,34(l):100-103. XU Ying.Camouflage color selection based on dominant color extraction[J].Opto-Electronic Engineering,2007,34(l):100-103.(in Chinese)
[15]贾其,吕绪良,吴超,等.马尔科夫随机场和金字塔模型用于数字迷彩图案设计[J].应用科学学报,2012,30(6):624-628. JIA Qi,LYU Xu-liang,WU Chao,et al.Applieation of Markov random field and pyramid structure in the design of digital pattern painting[J].Journal of Applied Sciences:Electronics and Information Engineering,2012,30(6):624-627.(in Chinese)
[16]Nikolic IZ,Maksic V.Off-line programming of industrial robots by a personal computer[C]∥ Working Conference on Offline Programming of Industrial Robots.US:IEEE,1996:677-682.
[17]Cao XW,Wen F,Chai X J,et al.Rapid generation of spraying instructions for painting robot basing on automatic programming technology[C]∥Proceedings of the IEEE International Conference on Mechatronics and Automation(ICMA).Tianjin:IEEE,2014:669-674.
[18]Cao XW,Wen F,Chai X J,etal.Zone divide of three-dimensional model for spraying application on industrial robot[C]∥Proceedings of the IEEE International Conference on Mechatronics and Automation(ICMA).Takamatsu:IEEE,2013:1657-1662.
Research on Digital Pattern Automatic Painting System
XIEWei,ZHOU Zhi-yong,CAIYun-xiang,MU Jing-yang
(The First Engineers Scientific Research Institute,General Armaments Department,Wuxi214035,Jiangsu,China)
Digital pattern is a new camouflage technique,which has better camouflage effect.For the problem of low efficiency of artificial painting,four detection techniques,such as the 3D square gridmodeling ofmilitary equipment,the 3D digital pattern model generation,the spraying automatic path planning and the real time detection of lance position,are solved.A digital pattern automatic painting system is constructed.Test results show that the application of automatic system can effectively improve the painting efficiency of digital pattern,and promote the further development of digital pattern technology.
ordnance science and technology;camouflage;digital pattern;robot;three-dimensionalmodeling;instruction set generation;pattern design
TP24
A
1000-1093(2015)12-2396-05
10.3969/j.issn.1000-1093.2015.12.025
2015-04-16
国防预先研究项目(ZLY2011410)
谢卫(1963—),男,高级工程师。E-mail:xiewei63983@sina.com;蔡云骧(1984—),男,工程师。E-mail:caibuyi@sina.com
猜你喜欢
学校教育研究(2020年11期)2020-06-08
通信电源技术(2020年9期)2020-01-08
家庭影院技术(2018年11期)2018-12-26
娃娃画报(2018年6期)2018-08-15
娃娃画报(2018年5期)2018-08-15
娃娃画报(2018年3期)2018-08-15
影像视觉(2016年5期)2016-06-23
科技传播(2015年20期)2015-03-25
汽车零部件(2014年2期)2014-03-11
数码世界(2009年2期)2009-09-02