浅谈油船辅锅炉水位仿真控制
2015-10-21 17:19冯礼宾李峰
建筑工程技术与设计 2015年26期
冯礼宾 李峰

摘要:针对船用辅锅炉水位难以建立精确的数学模型的特点,为了便于建立较为精确的模拟控制单元,借助MATLAB/SIMULINK,以锅炉水位作为控制对象,对锅炉水位控制器进行建模分析,使锅炉水位理想的模拟控制单元。锅炉水位控制的任务是使给水量跟踪锅炉的蒸发量,给水量的变化随蒸发量的变化而变化,并维持锅炉水位在工艺允许的范围内,以保证锅炉的安全运行。
关键词:锅炉水位;PID;模糊控制;仿真
1.概述
锅炉水位仿真研究的内容:锅炉水位控制的内容是使给水量跟踪锅炉的蒸发量,给水量的变化随蒸发量的变化而变化了,并维持锅炉水位在工艺允许的范围内。针对锅炉水位难以建立数学模型的特点,为了便于建立较为精确的模拟控制单元,借助MATLAB/SIMULINK,对控制器进行建模分析以实现对锅炉水位的仿真控制。以锅炉水位作为主要控制对象,对锅炉水位控制器进行建模分析并用MATLAB仿真,还用了几种控制方式的对比,从而得出锅炉水位控制器的理想模型。
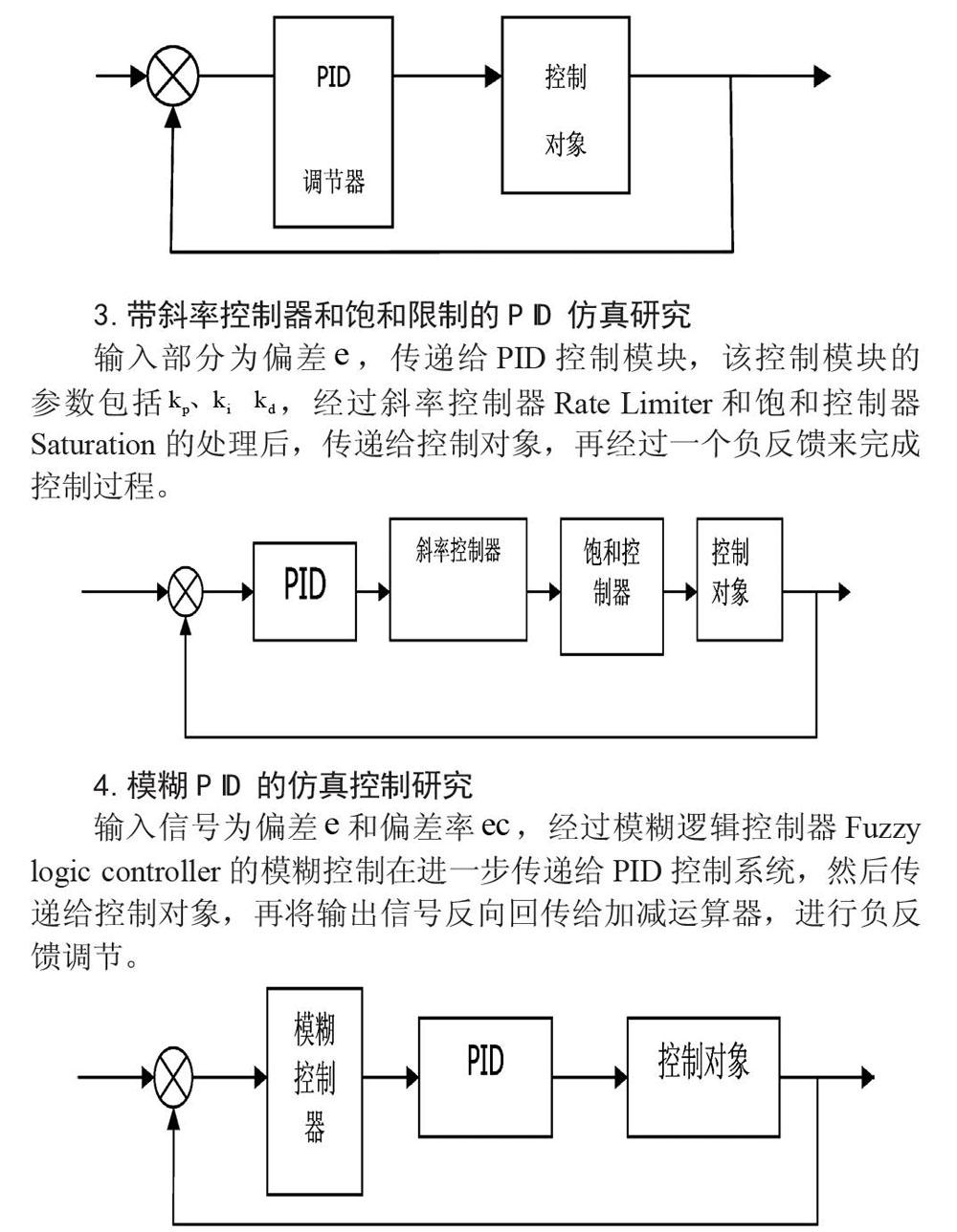
2.常规PID的研究
输入部分为锅炉水位的偏差 ,控制参数包括 ,传递给控制对象传递函数,再经过一个负反馈来完成控制过程。
3.带斜率控制器和饱和限制的PID仿真研究
输入部分为偏差 ,传递给PID控制模块,该控制模块的参数包括 ,经过斜率控制器Rate Limiter和饱和控制器Saturation的处理后,传递给控制对象,再经过一个负反馈来完成控制过程。
4.模糊PID的仿真控制研究
输入信号为偏差 和偏差率 ,经过模糊逻辑控制器Fuzzy logic controller的模糊控制在进一步传递给PID控制系统,然后传递给控制对象,再将输出信号反向回传给加减运算器,进行负反馈调节。
5.模糊自适应PID的仿真研究
输入信号为偏差 和偏差率 ,经过模糊逻辑控制器Fuzzy logic controller的模糊控制在进一步传递给PID控制子系统Subsystem,然后传递给控制对象,再将输出信号反向回传给加减运算器,进行负反馈调节。
6.几种PID控制方法的综合对比
常規PID控制超调量大(最大值接近1.5),过渡时间长(接近6s);带斜率控制和饱和限制的PID控制超调量较小(接近1.1),过渡时间长(接近6s);模糊PID控制超调量小,甚至可以实现无超调,但过渡时间较长(接近4s);模糊自适应PID控制超调量小,可以实现无超调,过渡时间短(接近2.5s)。
显然,模糊自适应PID控制方法作为最佳控制方案,它结合了模糊PID超调量小和自适应过渡时间短的优点,取得了较好的控制效果,控制性能优于传统PID和模糊PID,一定会有较为广阔的应用前景。
7.结论
在设计过程中,通过对船用辅锅炉动态响应过程的分析得到了锅炉水位控制的数学模型,借此对锅炉水位进行控制仿真分析,得到了锅炉各种工况下的工作特性曲线,通过对曲线进行分析,验证了本设计的控制方法对锅炉控制非常有效,从而为船用辅锅炉水位的控制找到了一有效的方法。比较了传统PID、带斜率控制器和饱和限制的PID、模糊PID和模糊自适应PID的超调量和过渡时间,找出了最佳控制方案,最佳控制方案的具体特征:超调量小、响应速度快、波动次数少、动静态稳定性能好、抗干扰能力强。
参考文献:
[1]郑文杰, 张习睿.基于模糊PID参数自调整的锅炉汽包水位控制设计[J].水利电力机械,2007年01期
[2]王宁,任光.船用锅炉水位模糊免疫自适应PID控制器及其仿真[J].大连海事大学学报,2006年01
[3]高俊.锅炉汽包水位模糊控制的应用研究[J].自动化仪表,2003年03期
猜你喜欢
中国测试(2018年9期)2018-05-14
现代职业教育·中职中专(2018年7期)2018-05-14
神州·中旬刊(2017年1期)2017-06-28
数字技术与应用(2016年9期)2016-11-09
数字技术与应用(2016年9期)2016-11-09
科技视界(2016年18期)2016-11-03
科技视界(2016年18期)2016-11-03
现代电子技术(2009年13期)2009-08-31