基于EDEM的螺旋带式动物饲料搅拌机设计与仿真试验
2015-10-21 17:19张晓龙伍德林高发允刘尧尧
建筑工程技术与设计 2015年26期
张晓龙 伍德林 高发允 刘尧尧
摘要:通过对饲料的运动轨迹进行了分析,确定选择合理的搅拌装置类型更有力于搅拌效率的提高。通过混合变异系数方法对饲料混合均匀度进行分析,确定了当前参数条件下的最佳搅拌时间。
1 螺旋带式TMR饲料搅拌机设计
1.1结构组成
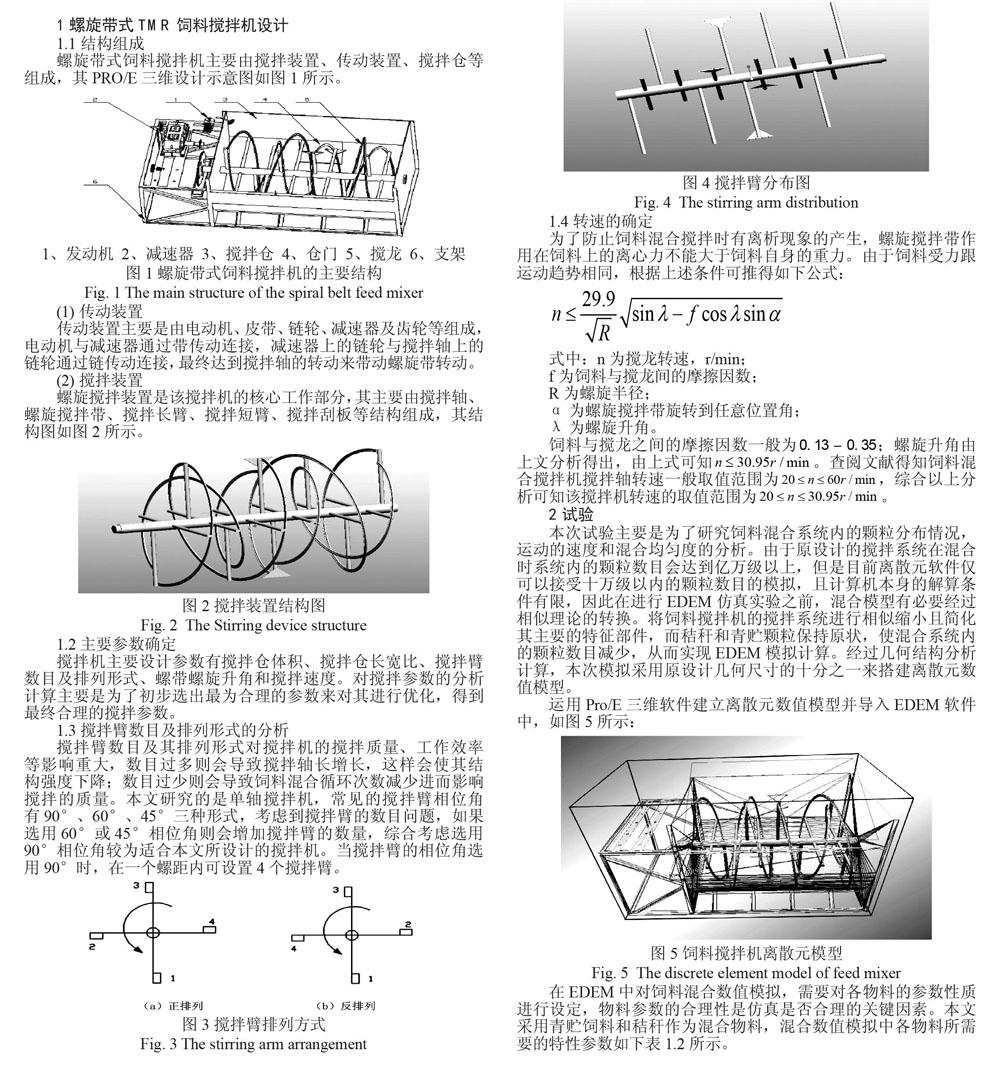
螺旋带式饲料搅拌机主要由搅拌装置、传动装置、搅拌仓等组成,其PRO/E三维设计示意图如图1所示。
1、发动机 2、减速器 3、搅拌仓 4、仓门 5、搅龙 6、支架
图1 螺旋带式饲料搅拌机的主要结构
Fig. 1 The main structure of the spiral belt feed mixer
(1)傳动装置
传动装置主要是由电动机、皮带、链轮、减速器及齿轮等组成,电动机与减速器通过带传动连接,减速器上的链轮与搅拌轴上的链轮通过链传动连接,最终达到搅拌轴的转动来带动螺旋带转动。
(2)搅拌装置
螺旋搅拌装置是该搅拌机的核心工作部分,其主要由搅拌轴、螺旋搅拌带、搅拌长臂、搅拌短臂、搅拌刮板等结构组成,其结构图如图2所示。
图2搅拌装置结构图
Fig. 2 The Stirring device structure
1.2 主要参数确定
搅拌机主要设计参数有搅拌仓体积、搅拌仓长宽比、搅拌臂数目及排列形式、螺带螺旋升角和搅拌速度。对搅拌参数的分析计算主要是为了初步选出最为合理的参数来对其进行优化,得到最终合理的搅拌参数。
1.2.1搅拌臂数目及排列形式的分析
搅拌臂数目及其排列形式对搅拌机的搅拌质量、工作效率等影响重大,数目过多则会导致搅拌轴长增长,这样会使其结构强度下降;数目过少则会导致饲料混合循环次数减少进而影响搅拌的质量。本文研究的是单轴搅拌机,常见的搅拌臂相位角有90°、60°、45°三种形式,考虑到搅拌臂的数目问题,如果选用60°或45°相位角则会增加搅拌臂的数量,综合考虑选用90°相位角较为适合本文所设计的搅拌机。当搅拌臂的相位角选用90°时,在一个螺距内可设置4个搅拌臂。
(a)正排列 (b)反排列
图3 搅拌臂排列方式
Fig. 3 The stirring arm arrangement
如图4所示。外螺旋带将饲料从搅拌仓的两侧向中间推送,内螺旋带将饲料从搅拌仓的中间向两边推送从而形成对流运动,提高了搅拌机搅拌质量。
图4搅拌臂分布图
Fig. 4 The stirring arm distribution
3.3转速的确定
为了防止饲料混合搅拌时有离析现象的产生,螺旋搅拌带作用在饲料上的离心力不能大于饲料自身的重力。由于饲料受力跟运动趋势相同,根据上述条件可推得如下公式:
式中:n为搅龙转速,r/min;
f为饲料与搅龙间的摩擦因数;
R为螺旋半径;
α为螺旋搅拌带旋转到任意位置角;
λ为螺旋升角。
饲料与搅龙之间的摩擦因数一般为 ;螺旋升角由上文分析得出,由上式可知 。查阅文献得知饲料混合搅拌机搅拌轴转速一般取值范围为 ,综合以上分析可知该搅拌机转速的取值范围为 。
2 试验
本次试验主要是为了研究饲料混合系统内的颗粒分布情况,运动的速度和混合均匀度的分析。由于原设计的搅拌系统在混合时系统内的颗粒数目会达到亿万级以上,但是目前离散元软件仅可以接受十万级以内的颗粒数目的模拟,且计算机本身的解算条件有限,因此在进行EDEM仿真实验之前,混合模型有必要经过相似理论的转换。将饲料搅拌机的搅拌系统进行相似缩小且简化其主要的特征部件,而秸秆和青贮颗粒保持原状,使混合系统内的颗粒数目减少,从而实现EDEM模拟计算。经过几何结构分析计算,本次模拟采用原设计几何尺寸的十分之一来搭建离散元数值模型。
运用Pro/E三维软件建立离散元数值模型并导入EDEM软件中,如图5所示:
图5 饲料搅拌机离散元模型
Fig. 5 The discrete element model of feed mixer
在EDEM中对饲料混合数值模拟,需要对各物料的参数性质进行设定,物料参数的合理性是仿真是否合理的关键因素。本文采用青贮饲料和秸秆作为混合物料,混合数值模拟中各物料所需要的特性参数如下表1﹑2所示。
在EDEM软件中,任何形状的颗粒都可以通过在三维软件中创建模型然后导入其中,本次模拟所需要的秸秆跟青贮颗粒都是类似于圆球形,在不影响主体的结果情况下我们对青贮和秸秆颗粒均以圆球形状颗粒模拟计算,设定青贮颗粒直径为18mm,秸秆颗粒直径为14mm,如下图6所示:
图6定义颗粒模型
Fig. 6 The definition of particle model
EDEM离散元软件中设有Hertz一Mindin(no slip)、Hertz一Mindin(no slip) with RDV Rolling Friction等8中常用的软球接触模型,如下图5-6所示。根据饲料搅拌机及物料特性等实际情况考虑,选用Hertz一Mindin(no slip)接触模型来进行数值模拟,如下图所示。
5.4仿真结果分析
5.4.1饲料运动轨迹分析
在当前设置的参数下对搅拌系统进行仿真计算,得到(a)饲料运动轨迹图。在图(b)中,搅拌轴沿逆时针方向转动,在螺旋搅拌带的做用下,物料颗粒沿着逆时针方向作旋转运动;在图(a)中,物料颗粒在搅拌装置外螺旋带的作用下从两边向中间运动,同时内螺旋带的作用使物料颗粒从中间向两边运动,从而形成了强烈的对流运动,更加利于搅拌效率的提高
5.4.2饲料混合均匀度分析
饲料混合均匀度是评判饲料搅拌机质量优劣的关键指标,本文通过分析计算饲料混合的变异系数以此来反应饲料混合均匀与否。变异系数即标准差率,用来反应饲料的离散程度,变异系数越小,离散程度越大,饲料混合越均匀。通过在Analyst中建立合适的网格,并计算在每个网格中不同颗粒的配比情况,舍弃颗粒数量不足20的网格,统计计算出颗粒的标准差率,以此來反应饲料混合的离散程度 。图6-4为搅拌系统区域网格划分图。
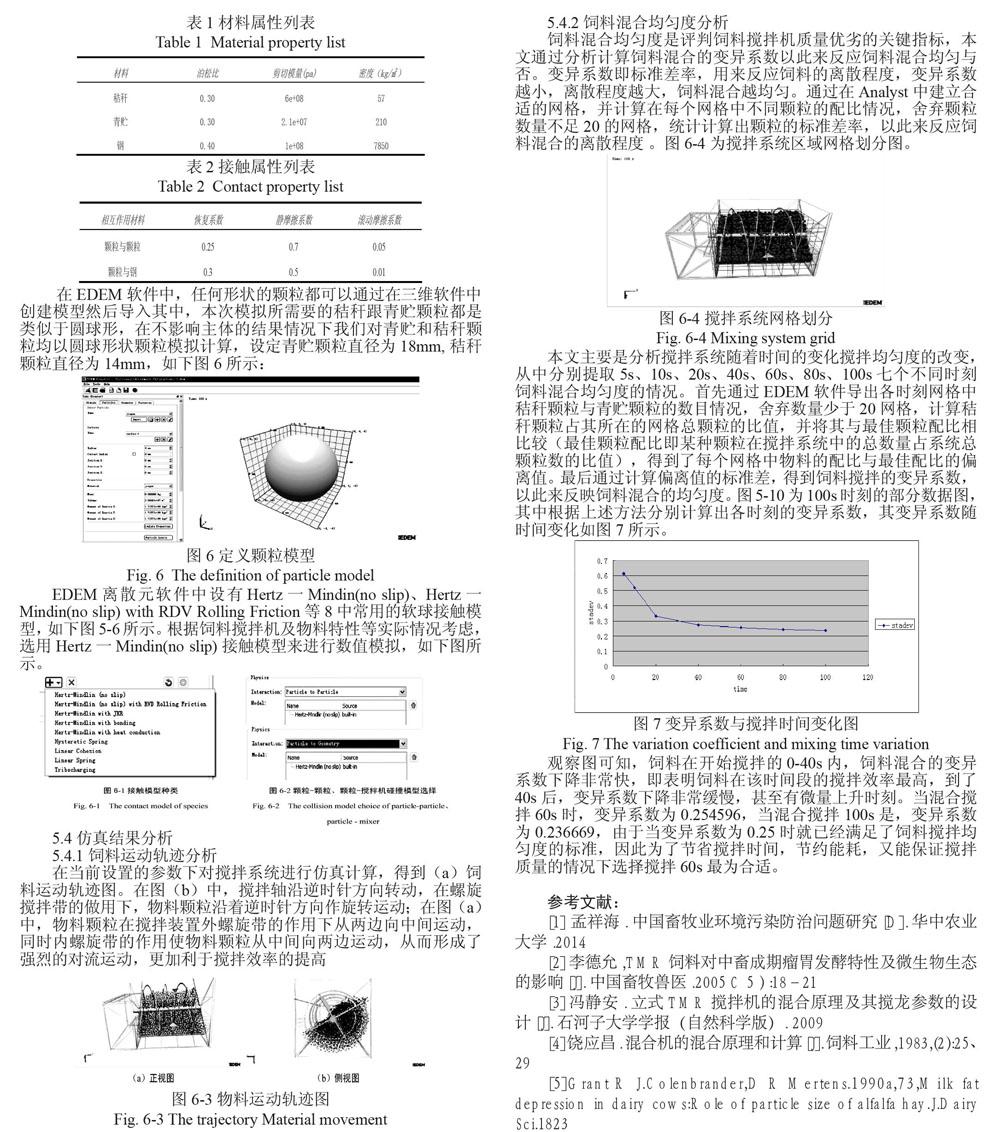
本文主要是分析搅拌系统随着时间的变化搅拌均匀度的改变,从中分别提取5s、10s、20s、40s、60s、80s、100s七个不同时刻饲料混合均匀度的情况。首先通过EDEM软件导出各时刻网格中秸秆颗粒与青贮颗粒的数目情况,舍弃数量少于20网格,计算秸秆颗粒占其所在的网格总颗粒的比值,并将其与最佳颗粒配比相比较(最佳颗粒配比即某种颗粒在搅拌系统中的总数量占系统总颗粒数的比值),得到了每个网格中物料的配比与最佳配比的偏离值。最后通过计算偏离值的标准差,得到饲料搅拌的变异系数,以此来反映饲料混合的均匀度。图5-10为100s时刻的部分数据图,其中根据上述方法分别计算出各时刻的变异系数,其变异系数随时间变化如图7所示。
Fig. 7 The variation coefficient and mixing time variation
观察图可知,饲料在开始搅拌的0-40s内,饲料混合的变异系数下降非常快,即表明饲料在该时间段的搅拌效率最高,到了40s后,变异系数下降非常缓慢,甚至有微量上升时刻。当混合搅拌60s时,变异系数为0.254596,当混合搅拌100s是,变异系数为0.236669,由于当变异系数为0.25时就已经满足了饲料搅拌均匀度的标准,因此为了节省搅拌时间,节约能耗,又能保证搅拌质量的情况下选择搅拌60s最为合适。
参考文献
[1] 孟祥海.中国畜牧业环境污染防治问题研究[D].华中农业大学.2014
[2]李德允,TMR饲料对中畜成期瘤胃发酵特性及微生物生态的影响[J].中国畜牧兽医.2005 C 5 ) :18 -21
[3]冯静安.立式TMR搅拌机的混合原理及其搅龙参数的设计[J].石河子大学学报(自然科学版). 2009
[4]饶应昌.混合机的混合原理和计算[J].饲料工业,1983,(2):25、29
[5]Grant R J.Colenbrander,D R Mertens.1990a,73,Milk fat depression in dairy cows:Role of particle size of alfalfa hay.J.Dairy Sci.1823
猜你喜欢
阅读(中年级)(2022年5期)2022-06-06
小猕猴智力画刊(2021年6期)2021-08-05
民间故事选刊·上(2021年5期)2021-05-17
读者(2020年15期)2020-07-31
伴侣(2018年2期)2018-02-28
湖北畜牧兽医(2017年4期)2017-05-18
绿色科技(2017年7期)2017-05-12
作文大王·低年级(2016年3期)2016-03-11
纺织导报(2014年8期)2014-10-31
中学理科·综合版(2008年3期)2008-03-07