直线伺服系统正交投影迭代学习控制器参数辨识与优化
2015-10-28 09:46杨亮亮史伟民刘宜胜周云飞
中国机械工程 2015年1期
杨亮亮 史伟民 刘宜胜 周云飞
1.浙江理工大学,杭州,310018 2.华中科技大学,武汉,430074
直线伺服系统正交投影迭代学习控制器参数辨识与优化
杨亮亮1史伟民1刘宜胜1周云飞2
1.浙江理工大学,杭州,3100182.华中科技大学,武汉,430074
针对高频响直线伺服系统前馈控制器参数的辨识问题,引入正交矢量投影的分析方法构建正交矢量基函数,将控制模型在基函数所构建的正交矢量空间中进行投影,采用迭代学习方法沿基函数轴方向进行前馈控制器参数迭代辨识并通过前馈进行补偿,将迭代学习控制方法从时域辨识拓展到正交矢量基函数空间领域。仿真与实验结果表明,该方法显著提高了直线伺服系统的位置跟踪精度和高速响应性能,满足高速高精度的要求。
直线驱动;正交投影;迭代学习;参数辨识
0 引言
直线伺服系统采用直接驱动的机械结构,与传统的机械结构(即旋转电动机+滚珠丝杠)进给传动方式相比,不存在中间传递环节,具有相对小的负载惯量,可以获得比传统驱动形式大得多的加减速度和加工速度,具有高频响的优点。为了充分发挥直线伺服系统高响应的优点,其控制器除了采用一般的反馈控制器来保证系统的稳定性和对外部干扰与参数摄动的鲁棒性外,还采用前馈控制器以提高系统的跟踪性能[1-3]。因此,前馈控制器是直线伺服系统能否充分发挥高速高精度性能的关键因素之一。
前馈控制器的设计一般将被控对象的逆直接作为前馈控制器实现前馈补偿[4-5]。该方法需要通过参数辨识获取比较精确的模型参数用以设计前馈控制器,一旦获取的模型参数与实际模型参数有较大误差,就会出现振荡、稳定性降低、控制性能下降等现象。因此,获取较为准确的模型参数是前馈控制器设计的关键。
迭代学习控制方法适合于某种具有重复运动性质的被控对象,利用系统前期控制经验和输出误差来修正当前的控制作用,使系统输出尽可能收敛于期望值。迭代学习控制方法特别适用于复杂、难以建模以及有高精度控制要求的场合[6-9]。文献[10]采用迭代学习的方法对被控对象的前馈控制器参数进行迭代辨识,提高了前馈控制器对被控对象逆模型的逼近程度,减小了跟踪误差。文献[11]采用迭代学习方法对光刻机硅片台直线伺服系统中存在的推力纹波扰动进行了补偿,减小了推力纹波扰动。Tousain等[12]建立了基于控制对象脉冲传递矩阵的迭代算法的闭环模型,并采用多目标函数最优设计方法设计了迭代率,在迭代域闭环控制稳定的前提下使伺服系统的跟踪性能达到最优,且具有一定的鲁棒性。虽然国内外许多学者采用迭代学习控制方法进行扰动抑制与参数辨识,取得了良好的效果,但依然存在以下局限性:迭代算法只是在时域进行迭代辨识,辨识时各参数对辨识结果的影响耦合在一起,影响辨识效果。而正交投影则避免了辨识时各参数之间的相互影响,可以综合考虑基函数及被控对象的投影参数对直线伺服性能的影响,并且正交投影的实质是对状态信号进行了预压缩,需要辨识的只是被控对象中状态信号在基函数构成的矢量空间沿各个基函数轴的参数,因此大大压缩了辨识矩阵,降低了算法复杂性。
本文设计思路是设计参数化前馈控制器,针对前馈控制器的参数化模型,构建正交矢量基函数,将被控对象的数学模型在基函数所构建的正交矢量空间中进行投影,采用迭代学习方法沿基函数轴方向进行前馈参数的迭代辨识获取优化的前馈控制器参数,使系统的轨迹跟踪性能最优。
1 前馈控制器参数化设计
直线驱动系统控制器结构一般采用图1所示的前馈加反馈两自由度控制策略,图1中G为被控对象,C为反馈控制器、F为前馈控制器,r为理想轨迹指令,e为轨迹跟踪误差,ub为反馈控制器输出指令,uf为前馈控制器输出指令,u为被控制对象G的指令信号,ω为扰动信号,系统的输出为y,在该两自由度控制策略中,反馈控制器C用来保证系统的稳定性和对外部干扰及参数摄动的鲁棒性,前馈控制器F用来提高系统的响应速度。
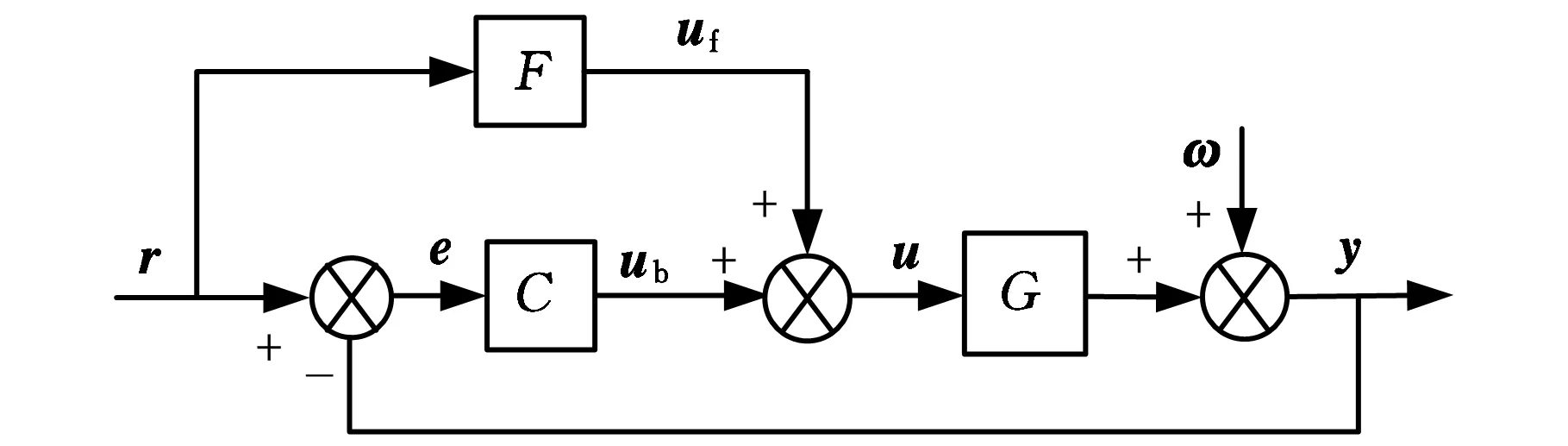
图1 直线驱动系统控制器结构图
由图1,可以得到输出信号Y(s)与误差信号E(s):
Y(s)=GP(s)R(s)+GT(s)F(s)R(s)+GS(s)W(s)
(1)
E(s)=GS(s)R(s)-GT(s)F(s)R(s)+GS(s)W(s)
(2)
(3)
式中,R(s)、W(s)分别为时域信号r、ω的拉氏变换。
由式(2)可知,忽略扰动ω的影响,如果前馈控制器F等于被控对象G的逆,则跟踪误差为零,可以实现轨迹的完全跟踪。
针对前馈控制器的设计,文献[5]采用参数化设计方法确定了前馈控制器的结构。前馈控制器由一个或多个参数相互配合而成,其结构为一个线性函数,即
(4)
其中,λi为前馈控制器参数,s(i)分别对应理想轨迹指令的n阶导数,该参数化前馈控制器在高速高精运动控制系统中可以很好地描述被控对象倒数的低频特性。
令λ=[λnλn-1…λ0],对于每一个具体的被控对象G都存在一理想前馈参数矢量λ*,当λ=λ*时,输入轨迹指令r*,可以实现轨迹理想跟踪,此时y=r*。因此,需要采用参数辨识方法进行λ的参数辨识。
2 直线伺服控制系统正交投影分解
不考虑非线性因素,采用迭代方式进行直线伺服系统前馈参数辨识。假设每次迭代辨识的时间长度t∈[0,T],其中,T为常量,采样周期为Ts,输入理想轨迹指令为r*,由于迭代学习采用离散化的处理方式,将各信号进行离散化处理,取N=T/Ts,则可采用向量形式描述各信号,如第k次迭代输出信号y(k)的离散化向量描述如下:
y(k)=[y(k)(0)y(k)(1)…y(k)(N-1)]T
(6)
式中,yk(j)为第k次迭代时输出信号y的第j+1个元素。
根据式(1),采用离散化向量方式描述各个信号可得
传递函数D(s)的脉冲响应矩阵D为
(7)
式中,di为D(s)的单位脉冲响应序列。
若存在m个正交矢量基函数,构建m维正交矢量空间V=[f1(t)f2(t)…fm(t)],将该矢量空间按照时间t∈[0,T]、采样周期为Ts进行离散化,得到投影矩阵A:
(8)
若n+1=m,采用矩阵A对式(1)中的各信号进行空间正交投影,将各信号投影到正交矢量空间V,可得
[∂0∂1…∂n]T=A[d(0)d(1)…d(N-1)]T
(9)
其中,[∂0∂1…∂n]为时域离散信号[d(0)d(1)…d(N-1)]在空间V中的坐标参数。
将式(9)代入式(1),对所有信号进行矢量投影,可得
(10)
MP=ATGPAMS=ATGSA
其中,ζ*为每次迭代时指令输入信号r*在空间V中的坐标参数矢量。δ(k)、λ(k)、β(k)分别为第k次迭代时响应y、前馈输入信号uf、扰动ω在空间V中的投影参数坐标矢量。MP、MS为变换矩阵。若迭代误差经过投影后沿各矢量轴的参数为φ,可得
φ(k)=δ*-δ(k)
对于式(8)所表示的系统,可采用迭代学习方法对λ进行迭代辨识。
3 正交矢量基函数的选择
由式(4)可知,前馈控制信号uf与输入指令r满足
(11)
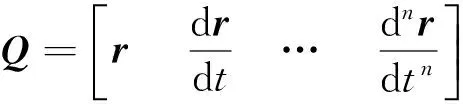
矩阵Q可实现时域前馈信号uf向参数空间的投影,即
(12)
为了实现投影矩阵的正交化,对矩阵Q采用矩阵QR分解方法或者施密特正交化方法,本文采用矩阵的QR分解方法对矩阵Q进行正交化分解:
Q=UR
(13)
其中,UTU=I,R为上三角矩阵。选取矩阵U的n+1个列矢量作为正交矢量基函数构建矢量空间V,则投影矩阵A为
A=U=[f1(t)f2(t)…fn+1(t)]
(14)
因此,通过投影变换可将时域的前馈信号时域的辨识问题转变为前馈信号在正交矢量空间V投影后沿基函数轴参数辨识问题。
4 沿矢量轴参数迭代学习辨识收敛性分析
采用如下学习率:
λ(k+1)=λ(k)+H φ(k)λ(k)|k=0=λ(0)
(15)
其中,H为定常增益矩阵。则采用该迭代率进行参数迭代辨识的迭代域闭环控制框图见图2。
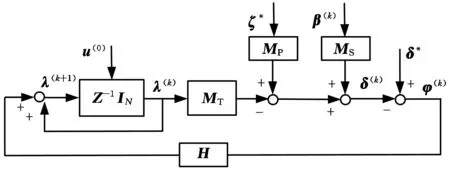
图2 基于迭代域闭环控制框图
假设每次迭代时扰动ω保持不变,β=β*,理想轨迹r*的投影参数矢量ζ*不变,理想输出y*的投影参数矢量δ*不变,则有
φk+1=δ*-δ(k+1)=δ*-(MPζ*-MTλ(k+1)+
MSβ(k+1)=δ*-(MPζ*-MT(λ(k)+H φ(k))+
MSβ(k+1))=δ*-(MPζ*-MTλ(k)-MTH φ(k)+
MSβ(k+1)=(I+MTH)φ(k)
(16)
由上式可知,当设计迭代率H满足下式:
‖I+MTH‖∞<1
(17)
且k→∞时,φ→0,此时λ→λ*。
5 仿真与实验分析
5.1仿真分析
仿真时设被控对象为一个二阶震荡系统,阻尼系数为0.85,无阻尼自然振荡频率为20 rad/s,其传递函数为
(18)
图1中,C(s)采用PID控制器的比例系数、积分系数、微分系数分别为2440、116、0.45,闭环回路带宽调整为220 rad/s。进行矢量投影迭代参数辨识时,采用式(15)的迭代学习率,其中增益矩阵H为
(19)
时,满足当k→∞时,λ→λ*。
采用正交投影迭代学习进行前馈参数辨识的步骤如下:
(1)根据输入信号r(t),用式(12)、式(13)计算投影投影矩阵A。
(2)计算脉冲响应矩阵GS、GP,然后根据投影矩阵A计算式(10)中的MS、MP。
(3)令迭代次数k=0,并设定迭代初值λ(0)。
(4)根据图2计算误差的矢量投影参数φ(k)。
(5)根据式(9)计算新的参数λ(k+1),当λ(k+1)-λ(k)小于给定误差时迭代结束;否则,将新的参数λ(k+1)代入图2,返回步骤(4)。
由式(18)可知理想前馈参数λ=[403.41.0],前馈参数辨识时,输入信号为将频率为1 Hz、幅值为1的方波S(s)经过4个一阶低通滤波器进行滤波后的3阶连续可导理想信号r(t),即
为了控制计算量,仿真时采样数据个数为1000,分以下三种情况进行仿真:①采样周期为10ms,仿真时间为10s;②采样周期为5ms,仿真时间为5s;③采样周期为1ms,仿真时间为1s。仿真时迭代次数为80。每次仿真时分别绘制跟踪误差-时间曲线和前馈参数-迭代次数曲线。仿真结果如图3~图5所示。
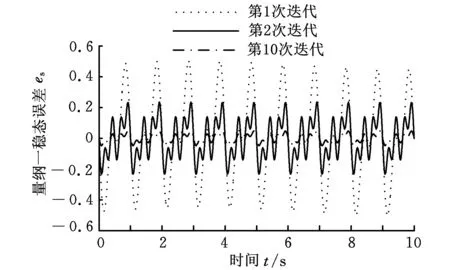
(a)稳态误差-时间曲线
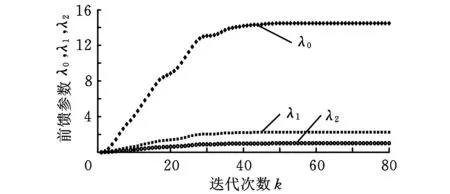
(b)前馈参数-迭代次数曲线图3 仿真结果(Ts=10 ms,仿真时间为10 s)

(a)稳态误差-时间曲线
(b)前馈参数-迭代次数曲线图4 仿真结果(Ts=5 ms,仿真时间为5 s)
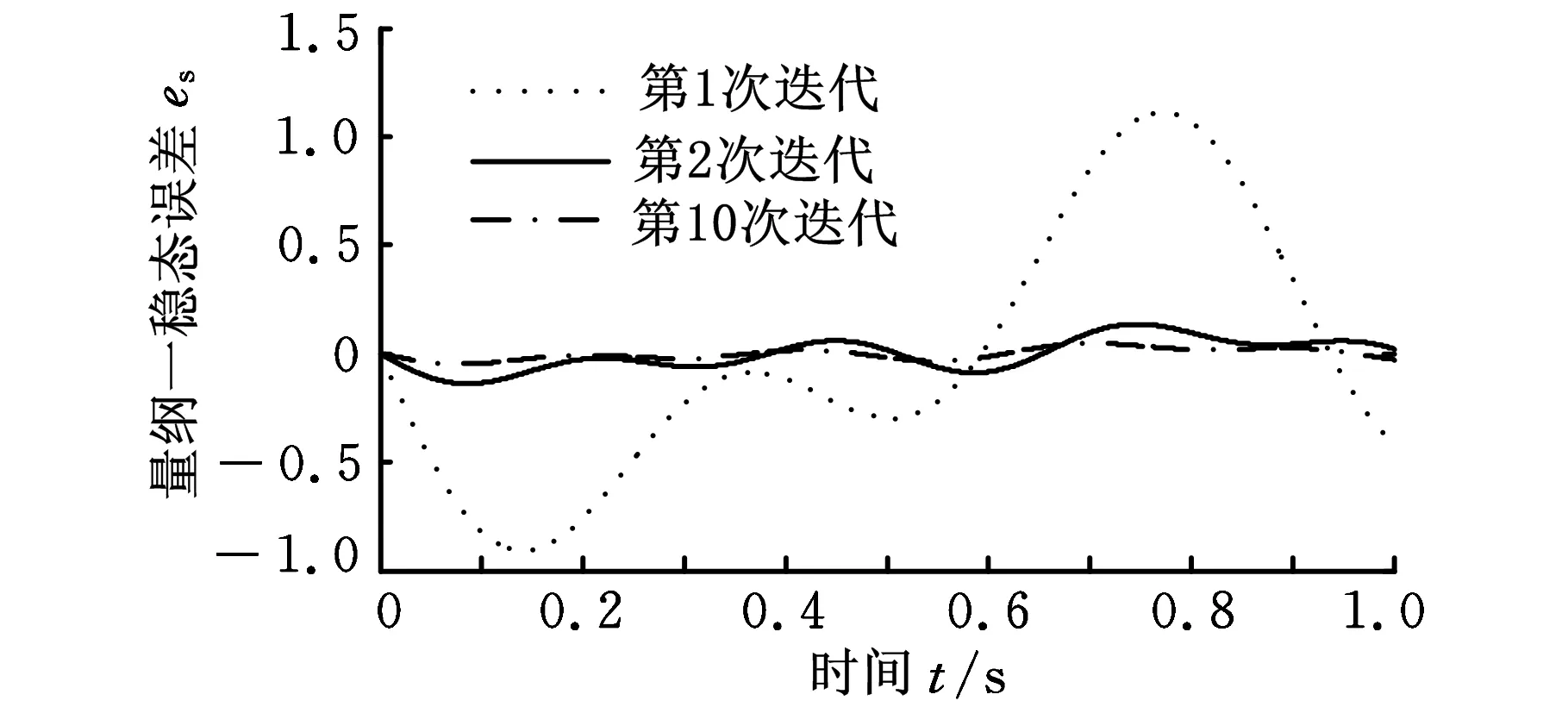
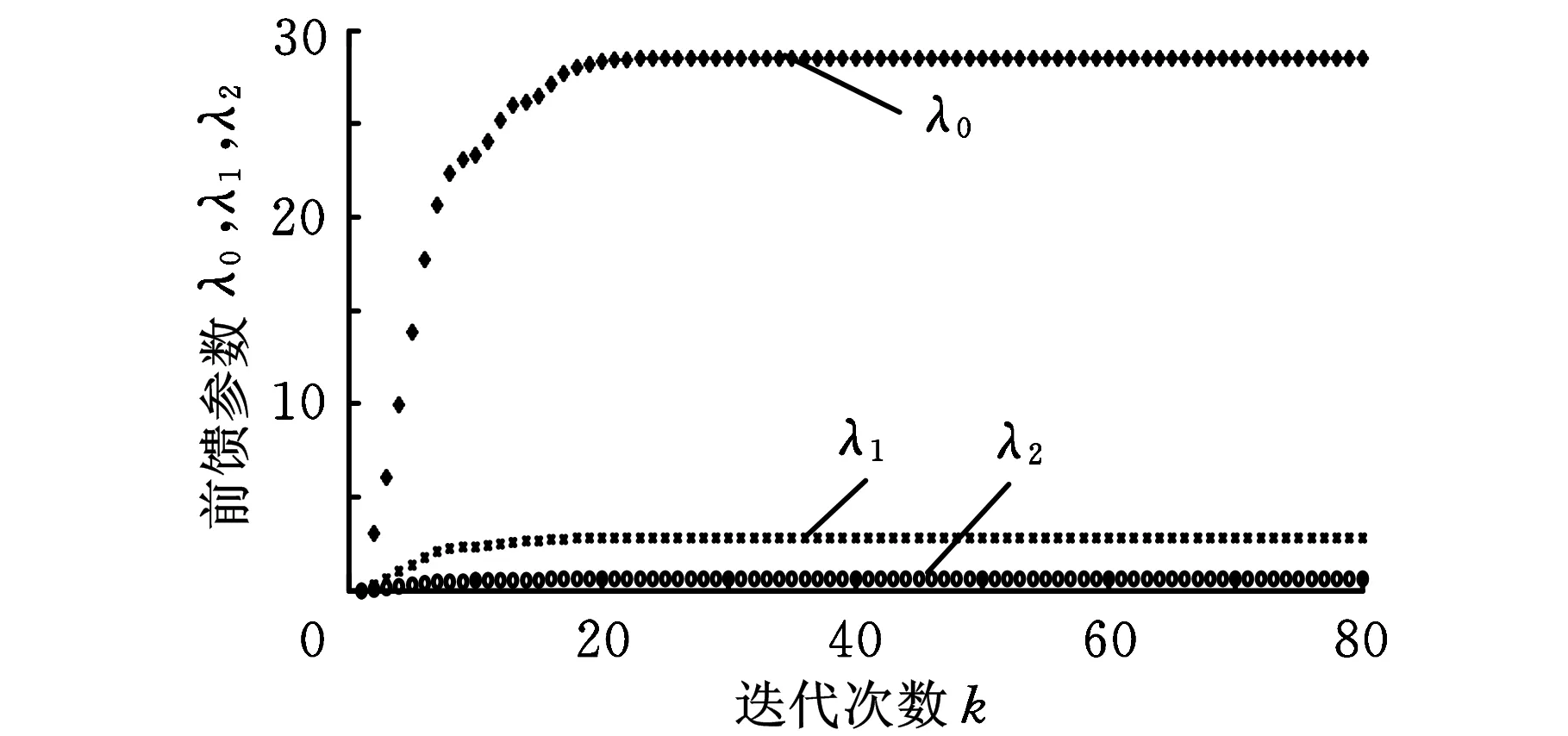
(a)稳态误差-时间曲线
(b)前馈参数-迭代次数曲线图5 仿真结果(Ts=1 ms,仿真时间为1 s)
由图3~图5可知,当采样值周期分别为10ms、5ms、1ms时,第1次迭代后稳态误差的最大绝对值分别为0.554、0.858、0.698;第2次迭代后稳态误差的最大绝对值分别为0.098、0.243、0.135,第10次迭代后稳态误差的最大绝对值分别为0.079、0.087、0.023,辨识出的参数λ分别收敛于[14.580,2.271,0.233],[27.152,2.696,0.568],[39.072,3.384,0.992];采用不同的采样周期时,随着迭代次数的增加,稳态误差的最大绝对值均明显减小,前馈参数均收敛于固定参数,且前20次迭代过程中的参数收敛速度较快,迭代20次后参数收敛速度较慢。参数的收敛精度随着采样周期的减小而提高。
5.2实验分析
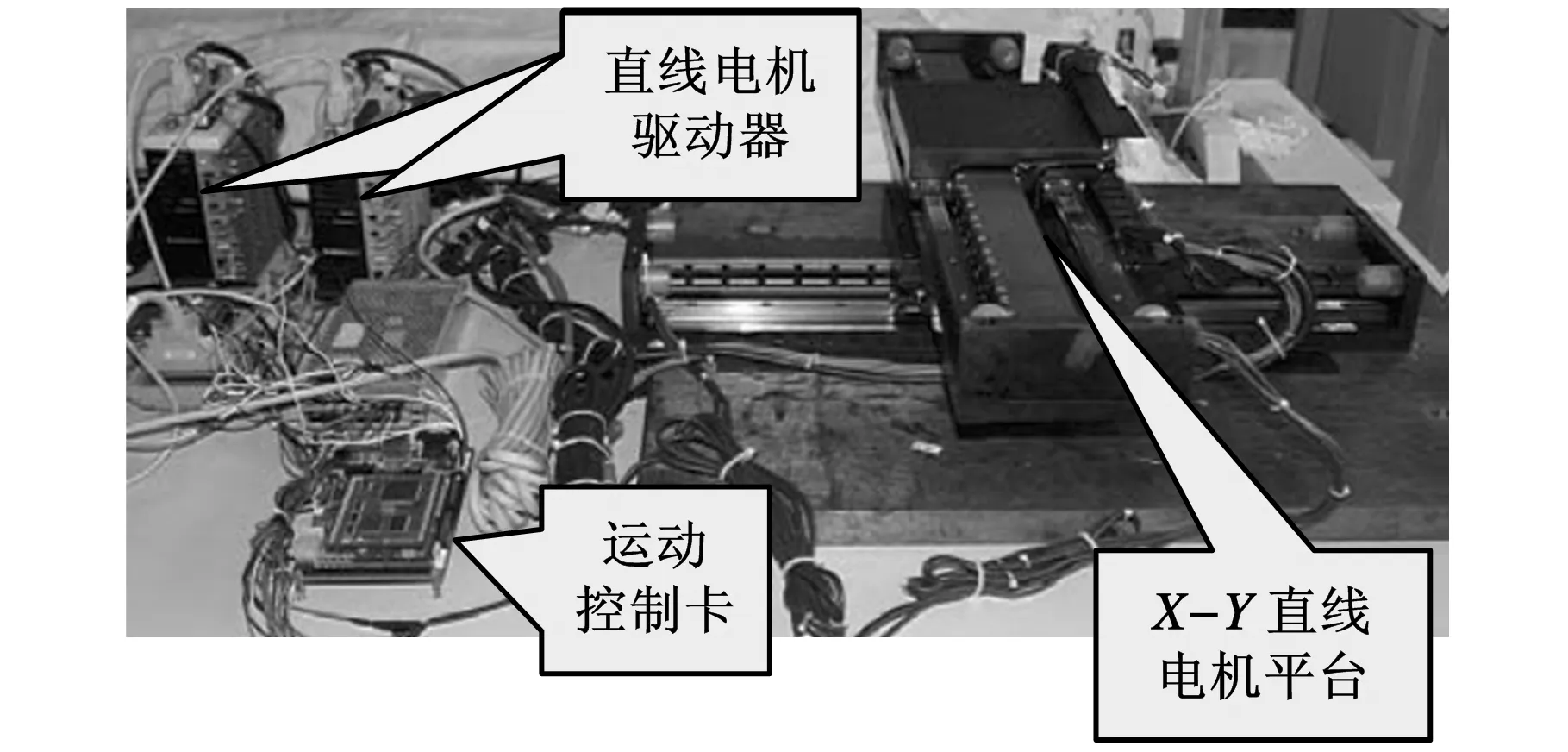
图6 直线伺服系统实验台
本文的实验系统为两个直线电机构成的X-Y平台,其结构框图见图6。直线电机均采用Baldor公司的LMCF02C-HCO,电机的连续推力为58 N,峰值推力为173 N,PMLSM的运动位置由GSI公司分辨率为0.5 μm的光栅尺测量,读数头型号为MII1600-40。伺服驱动器为Baldor公司的FMH2A03TR-EN23,采用电流控制方式。图1中反馈及前馈控制在自制的运动控制卡中实现,运动控制卡为TI公司高性能浮点型TMS320F6713。由于上层直线电机负载较小,具有相对高的响应速度,为了检测高速高精运动时算法的辨识性能,只对X-Y平台的上层的直线电机进行辨识实验,运行时,下层直线电机锁死静止不动。反馈控制器C(s)采用PID算法。为消除高频量测噪声的影响,反馈控制器C(s)还增加了一个低通滤波器。反馈控制器的传递函数形式如下:
其中,KP为比例增益;fI为积分频率;fD为微分频率;flwp为低通滤波器频率;βlwp为低通滤波器的阻尼系数。考虑到实际的直线伺服系统在低频段表现为一个一阶积分环节和一个惯性环节,因此,设计直线伺服系统的前馈控制器为
F(s)=λ2s2+λ1s
其中,λ2、λ1实际的物理意义分别为直线伺服系统的负载质量m和速度阻尼b。实验中对负载质量λ2(m)、速度阻尼λ1(b)进行迭代辨识。
实验中位置环伺服周期分别为100μs、500μs,其反馈控制器参数如下:KP=5×105,fD=50Hz,fI=3Hz,flwp=350Hz,βlwp=0.8。理想的指令轨迹如图7所示,采用S形加减速曲线,其中t1=0.17s,t2=0.43s,加加速度j=25m/s3,加速度a=2m/s2,恒速度段v=500mm/s,位移l=210mm。实际运行时,直线电机每次迭代都从固定点A点开始运行,按照理想指令轨迹运行到B点(A、B点距离为210mm),运行时的迭代运算所需的实时数据存储在运动控制卡的缓冲区中,运行结束后通过串口将此次迭代的实时数据传送到上位机,由上位机进行前馈参数的迭代更新,然后将更新数据下发到运动控制卡,直线电机返回A点开始下一次迭代。
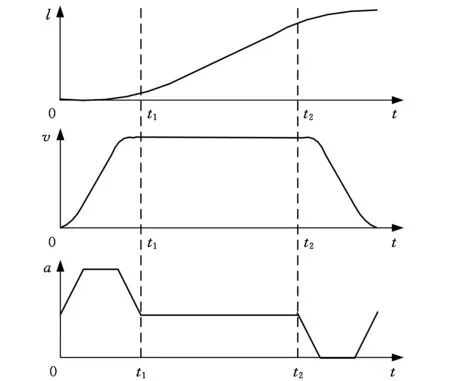
图7 理想轨迹指令
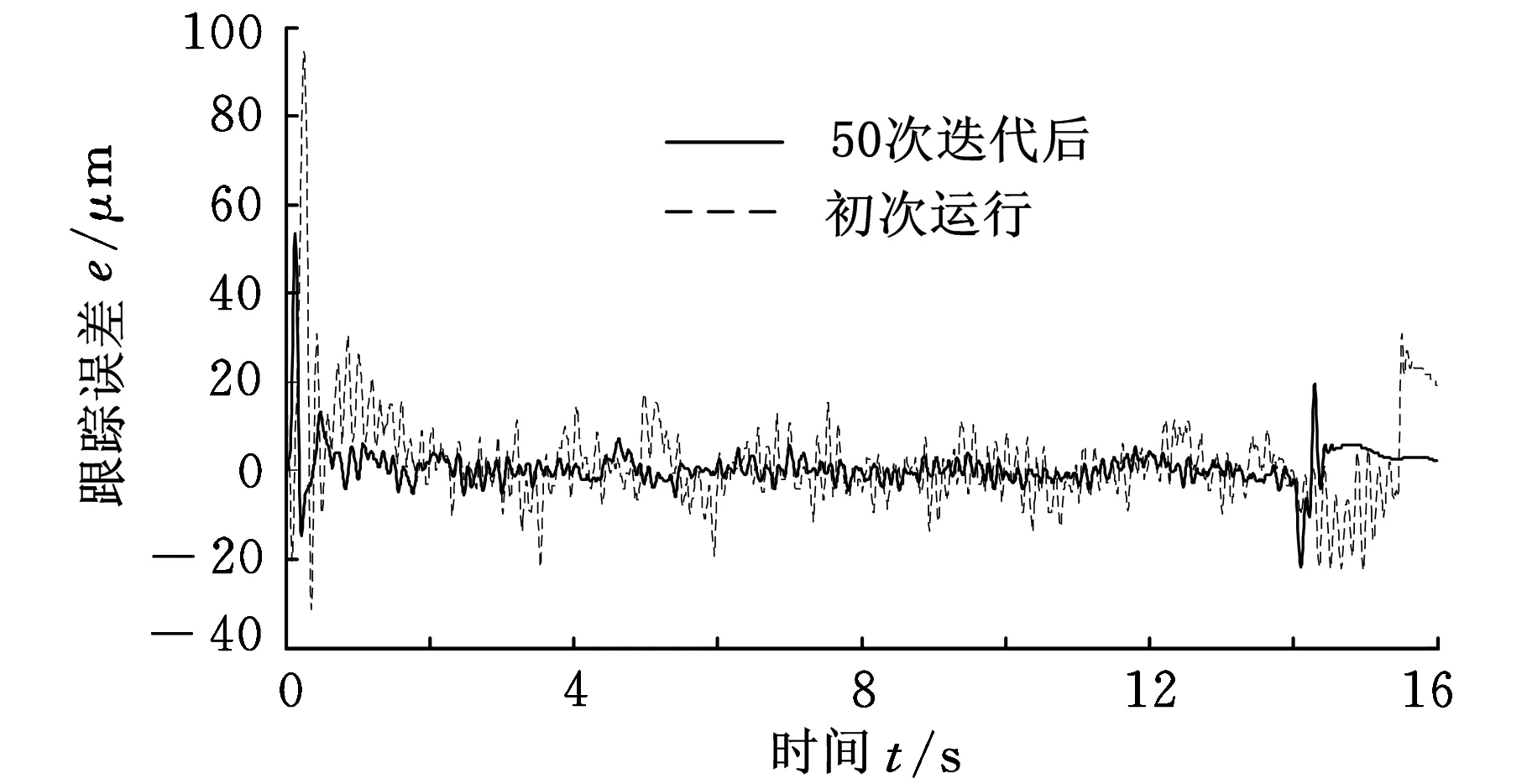
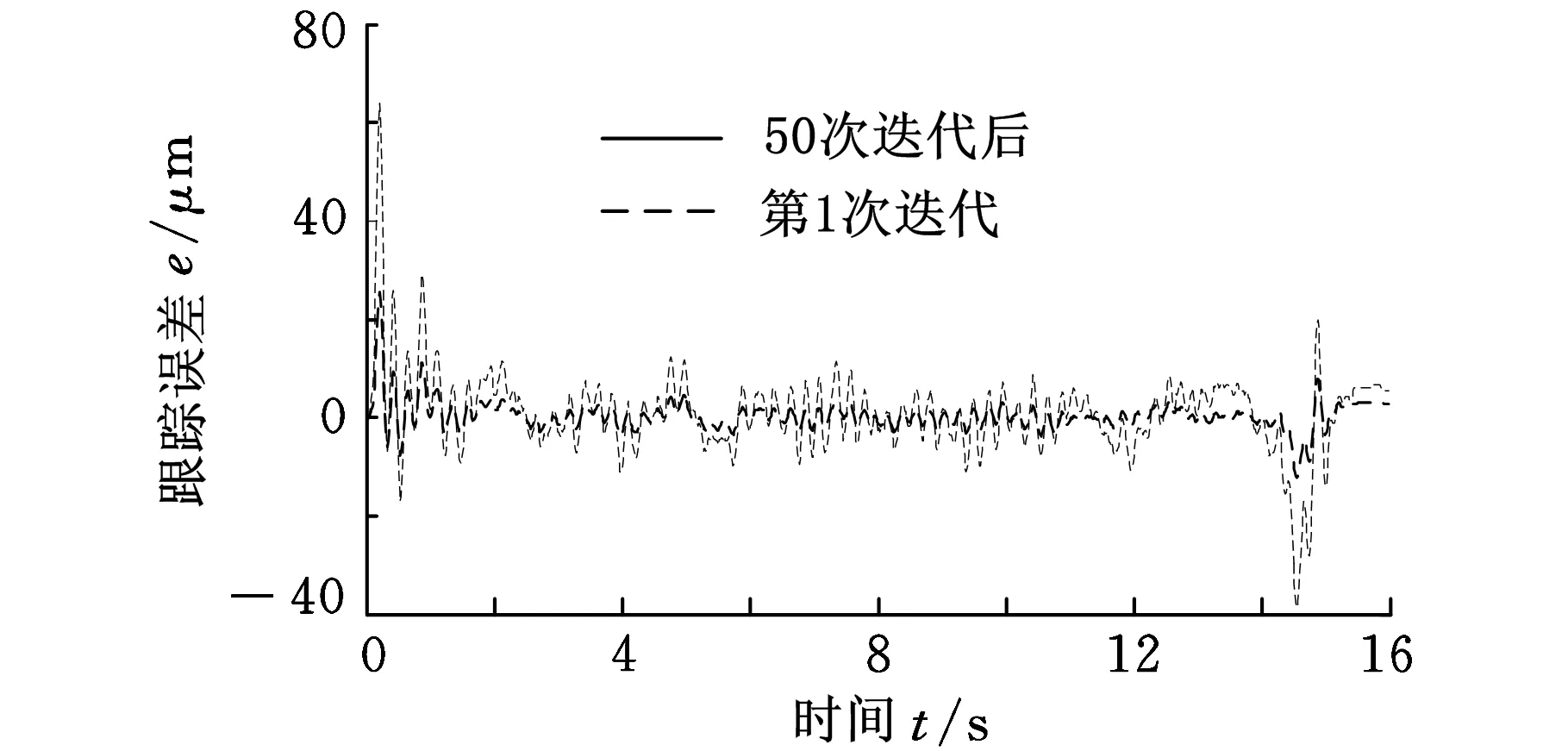
(a)跟踪误差-时间曲线
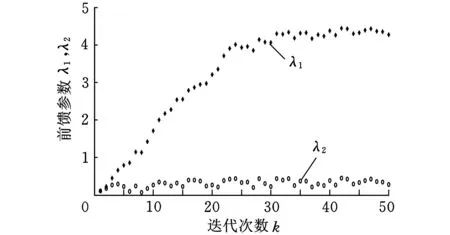
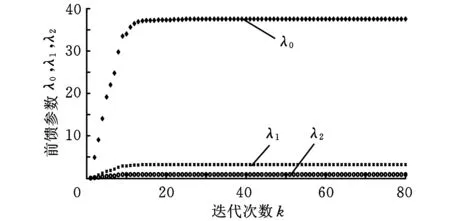
(b)前馈参数-迭代次数曲线图8 实验结果(Ts=500 μs)
(a)跟踪误差-时间曲线
图8、图9所示为位置环伺服周期分别为500 μs、100 μs时的实验结果。图8a、图9a所示为前馈参数随着迭代次数增加时的收敛情况,可以看出前馈参数均随着迭代次数的增加而收敛,图8a中的[λ2,λ1]收敛于[4.578,0.201],图9a中的[λ2,λ1]收敛于[4.036,0.123]。图8b、图9b分别为直线伺服系统初次运行与第50次迭代辨识后并经过前馈补偿后的跟踪误差。采样周期为500 μs 时,初次运行时匀速段最大误差为18.56 μm,通过50次迭代辨识和补偿后,其匀速段的误差减小为10.02 μm,图9a中采样周期为100 μs初次运行时匀速段最大误差为17.12 μm,通过50次纹波迭代辨识和补偿后,其匀速段的误差减小为8.32 μm。此外,初次运行时加速段和减速段的跟踪误差较大,而经过50次迭代后,图8b中加速段和减速段的最大误差从初次运行的95.23 μm减小到第50次迭代后的58.78 μm,图9b中加速段和减速段的最大误差从初次运行的63.23 μm减小到第50次迭代后的29.78 μm,这是因为经过50次前馈控制器迭代辨识后的参数λ更加接近理想的参数λ*。因此,可以认为图9b中的辨识参数更加接近实际对象的真实值。采样周期较小时,迭代辨识效果明显较好。随着迭代次数的增加,直线电机的轨迹跟踪性能得到了良好的改善。
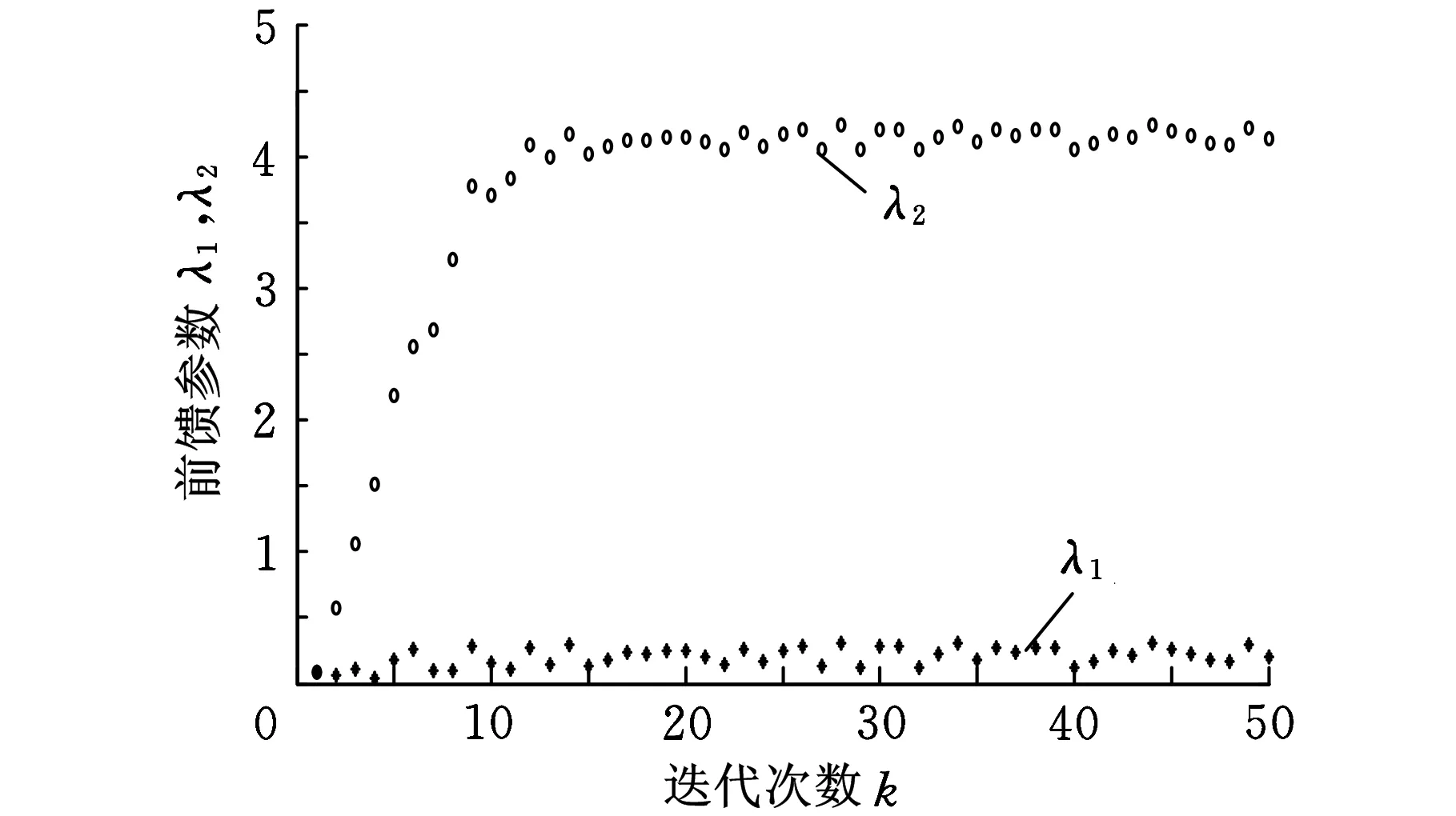
(b)前馈参数-迭代次数曲线图9 实验结果(Ts=100 μs)
6 结语
本文针对直线伺服系统前馈控制器设计原理,设计参数化前馈控制器,构建正交矢量基函数,将被控对象的数学模型在基函数所构建的正交矢量空间中进行投影,采用迭代学习方法沿基函数轴方向进行前馈参数的迭代辨识获取优前馈控制器参数。实验结果表明,通过正交投影迭代学习进行前馈控制器参数辨识,并通过前馈进行补偿能有效地减小系统位置跟踪误差,从而满足高速、高精度轨迹控制要求。
[1]石阳春,周云飞,李鸿,等. 长行程直线电机的迭代学习控制[J].中国电机工程学报,2007,27(24):92-96.
Shi Yangchun,Zhou Yunfei,Li Hong,et al.Research on Iterative Learning Control to Long Stroke Linear Motor[J]. Proceedings of the Chinese Society for Electrical Engineering,2007,27(24):92-96.
[2]宋亦旭,王春洪,尹文生,等. 永磁直线同步电动机的自适应学习控制[J].中国电机工程学报,2005,25(20):151-156.
Song Yixu,Wang Chunhong,Yin Wensheng,et al. Adaptive-learning Control for Permanent-Magnet Linear Synchronous Motors[J]. Proceedings of the Chinese Society for Electrical Engineering, 2005,25(20):151-156.
[3]Rohrig C, Jochheim A. Identification and Compensation of Force Ripple in Linear Permanent Magnet Motors[C]//American Control Conference. Arlington, 2001:2161-2166.[4]滕伟,周云飞,朱庆杰.直线驱动系统中前馈质量与电机常数校准研究[J].电气传动,2009,39(5):43-46.Teng Wei, Zhou Yunfei, Zhu Qingjie. Research on Calibrating Feedforward Mass & Motor Constant for Linear Driving System[J].Electric Drive,2009,39(5):43-46.
[5]van der Meulen S,Tousain R, Bosgra O.Fixed Structure Feedforward Controller Tuning Exploiting Iterative Trials, Applied to a High-precision Electromechanical Servo System[C]//American Control Conference. New York, 2007:4033-4039.
[6]朴凤贤,张庆灵,王哲峰. 迭代学习控制的收敛速度分析[J]. 东北大学学报(自然科学版),2006,27(8):836-838.
Piao Fengxian,Zhang Qingling,Wang Zhefeng.Analysis of Convergence Rate for Iterative Learning Control[J].Journal of Northeastern University(Natural Science),2006,27(8):836-838.
[7]于少娟,齐向东,吴聚华. 迭代学习控制理论及应用[M]. 北京:机械工业出版社,2005.
[8]孙明轩,黄宝键. 迭代学习控制[M].北京:国防工业出版社,1999.
[9]Dijkstra B G, Bosgra O H.Exploiting Iterative Learning Control for Input Shaping, with Application to a Wafer Stage[C]//Proceedings of the 2003 American Control Conference. Denver, 2003:4811-4815.
[10]Benjamin T F, Mishra S, Tomizuka M. Model Inverse Based Iterative Learning Control Using Finite Impulse Response Approximations[C]//Proceedings of American Control Conference Hyatt Regency Riverfront. St. Louis, 2009:931-936.
[11]Stearns H, Mishra S, Tomizuka M. Iterative Tuning of Feedforward Controller with Force Ripple Compensation for Wafer Stage[C]//Proceedings of 10th International Workshop on Advanced Motion Control.Trento, 2008:234-239.
[12]Tousain R, van der Meche E, Bosgra O.Design Strategy for Iterative Learning Control Based on Optimal Control[C]//Proceedings of the 40th IEEE Conference on Decision and Control.Orlando, 2001:4463-4468.
(编辑陈勇)
Identification and Optimization of Linear Servo System Controller Parameters Based on Iterative Learning of Orthogonal Projection
Yang Liangliang1Shi Weimin1Liu Yisheng1Zhou Yunfei2
1.ZheJiang Sci-Tech University,Hangzhou,310018 2.Huazhong University of Science and Technology,Wuhan,430074
According to the problem of feedforword parameter identification in linear servo system with high frequency response, a method of orthogonal projection was introduced. At first, orthogonalized basis functions were constructed and the control system was projected onto the axes of the basis functions,then system parameters were identified along the axes of basis functions by iterative learning and high speed response were compensated by feedforword.The method extends the iterative learning from time domain to the space of orthogonalized basis functions. The simulation and experements show this method can improve the tracking and high-response performance of linear servo system significantly and meet the high speed and high precision requrements.
linear drive; orthogonal projection; iterative learning; parameter identification
2013-05-21
国家自然科学基金资助项目(51305404);国家科技支撑计划资助项目(2013BAF05B01);浙江理工大学重点实验室优秀青年人才培养基金资助项目(ZSTUMD2012B004)
TM359.4;TP273DOI:10.3969/j.issn.1004-132X.2015.01.014
杨亮亮,男,1978年生。浙江理工大学机械与自动控制学院讲师、博士。主要研究方向为运动控制技术。史伟民,男,1965年生。浙江理工大学机械与自动控制学院教授、博士研究生导师。刘宜胜,男,1979年生。浙江理工大学机械与自动控制学院副教授、博士。周云飞,男,1956年生。华中科技大学机械工程学院教授、博士研究生导师。
猜你喜欢
北京航空航天大学学报(2022年6期)2022-07-02
军事文摘(2022年8期)2022-05-25
北京航空航天大学学报(2021年9期)2021-11-02
中学生数理化·高一版(2021年11期)2021-09-05
新疆大学学报(自然科学版)(中英文)(2020年2期)2020-07-25
学生天地·小学低年级版(2019年5期)2019-06-05
学生天地(2019年15期)2019-05-05
制造技术与机床(2017年3期)2017-06-23
现代防御技术(2016年1期)2016-06-01
新高考·高一物理(2016年1期)2016-03-05