
三坐标GPS定位精度标定机结构设计与特性分析*
2015-11-04 09:30张文宠杨洪涛王福元
组合机床与自动化加工技术 2015年7期
张文宠,杨洪涛,王福元
(1.安徽理工大学机械工程学院,安徽淮南 232001;2.盐城工学院机械工程学院,江苏盐城224000)
三坐标GPS定位精度标定机结构设计与特性分析*
张文宠1,杨洪涛1,王福元2
(1.安徽理工大学机械工程学院,安徽淮南 232001;2.盐城工学院机械工程学院,江苏盐城224000)
利用三坐标标定机快速标定GPS定位精度时,标定机的静动态特性在某种程度上会影响到三坐标标定机定位精度。为保证结构强度以及确定标定精度,利用三维CAD建立三坐标标定机模型,再应用Ansys有限元分析方法对机构进行了静力学、模态和瞬态动力学仿真分析,研究其相关动态特性及特定点的定位误差范围。仿真结果表明:标定机的三维静态定位误差不超过0.0001mm,不需误差补偿;标定机的固有频率较高,不会在所安装的激振器激励下产生共振;在施加的激振器的振动激励作用下,三坐标标定机的动态定位精度远小于设计定位精度0.1mm的要求,因此所设计的三坐标标定机可用于GPS的动态特性研究。
三坐标标定机;样机建模;静力学分析;动态特性分析
0 引言
变形监测技术可以有效监测与预报地面塌陷、滑坡等灾害的发生,避免生命、财产、经济等多方面的损失。GNSS(GPS/BDS/GLONASS)全球卫星定位技术作为空间大地测量技术,可以作为地面变形监测技术,与传统方法相比较,其不仅具有全天候监测、精度高、速度快、操作简便、同时提供监测点的三维位移信息等优点,而且与计算机网络相结合可实现实时数据采集、传输、管理到变形分析及预报的自动化,达到远程在线网络实时监控目的[1-2]。GNSS变形量提取的准确性是地质灾害准确、可靠监测与预报的前提。为此,必须研制高精度三维移动变形仿真实验平台,利用其产生的已知三维变形量(X、Y、Z三个方向),对GNSS变形量提取算法的正确性进行检验。本文设计的三坐标GPS定位精度标定机可以作为用于验证GNSS变形监测技术关键算法的实验平台,将进一步促进教师、科研人员对变形监测方法理论的创新,确保GNSS定位模型的正确性,进而保证灾害监测的准确性和可靠性。为了保证所研制的三坐标GPS定位精度标定机的动静态精度,本文利用有限元仿真分析的方法对三坐标GPS定位精度标定机的动静态特性和定位精度开展研究。
1 结构组成及虚拟样机建模
1.1 结构组成
本文所研制的三坐标GPS定位精度标定机主要由三坐标标定机、驱动系统、电气系统、测量系统、软件测试系统、可调式承载平台机构、用于GPS动态性能测试的激振机构和平衡机构构成。三坐标标定机如图1所示,主要由X向工作台、Y向工作台和Z轴工作台组成,呈上中下结构布置。Y向工作台装配在X轴滑座上,在X轴交流伺服电机和X向滚珠丝杠组成的传动系统的驱动下,沿着X向工作台上的直线导轨移动,从而实现X向的进给运动;同理,Z轴工作台装配在Y轴滑座上,在Y轴交流伺服电机和Y向滚珠丝杠组成的传动系统的驱动下,沿着Y向工作台上的直线导轨移动,从而实现Y向的进给运动;GPS和激振机构装配在Z向滑块GPS激振台位置,在Z轴交流伺服电机和Z向滚珠丝杠组成的传动系统的驱动下,可以实现Z向的进给运动[3-4];因此,GPS和激振机构随Z向滑块实现X、Y、Z三轴的移动,最终实现GPS和激振机构的空间三维移动。电气系统主要由带有角度编码器的伺服电机、伺服电机驱动器、PCI运动控制卡、光栅直线位移传感器、USB光栅数据采集器等其他电路组成。在PC机的软件控制下实现运动控制、触发采样以及光栅信号的采集和三维坐标的显示等。
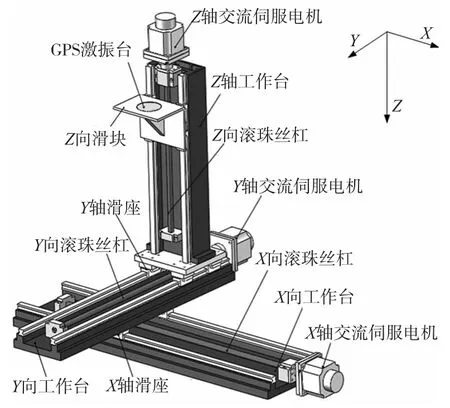
图1 三坐标标定机虚拟样机实体模型
1.2 虚拟样机有限元模型建立
为了所研制的三坐标GPS定位精度标定机的动静态特性和三维坐标定位精度,进行结构优化设计,本文利用有限元分析方法对其进行静态、模态、谐响应和瞬态激励相应等方面的仿真分析,用于确定标定机的固有频率、动、静态变形量大小,最终确定标定机的三维动、静态定位精度。要利用有限元分析(FEA,Finite Element Analysis)方法分析进行上述分析,必须根据实际条件建立标定机的精确虚拟样机三维模型,保证所建立的有限元模型与实际物理模型性能一致。
1.2.1 虚拟样机建模
由于所研究的三坐标标定机结构比较复杂,利用三维建模软件solidworks对其建立虚拟样机时,必须对其结构进行简化处理。本文对测量机采取了以下简化措施:
(1)忽略不计了对结构影响不大的电机、轴承座以及滚珠丝杠等相关部件。
(2)忽略不计对结构的影响细微的螺孔等细小结构。
(3)对于直线导轨上实际存在的圆角进行无圆角化处理,以避免因模型网格划分过度复杂而导致求解器无法求解。
本文建立的三坐标标定机三维CAD几何模型如图1所示,然后利用通用的IEGS文件格式直接将其导入ANSYSWorkbench中进行有限元建模。
1.2.2 材料的设置
综合考虑机床床身笨重、工作时易振动等相关问题,故选取造价低、易加工并具有减儒特性的材料QT450-10作为X、Y、Z三向工作台材料,其弹性模量EX=1.69×105MPa,泊松比PRXY=0.275,密度DEN=7.06×10-6kg/mm3;选用通用导轨材料为GCr15(介质均匀连续,各向同性),弹性模量EX= 2.19×105MPa,泊松比PRXY=0.3,密度DEN=7.83 ×10-6kg/mm3。
1.2.3 网格划分
网格划分对虚拟样机仿真分析结果影响至关重要。现有的研究成果表明,目前常见的方法主要是通过分网法和尺寸控制法对模型进行合理网格划分[5]。X、Y、Z三向工作台及导轨均采用六面体网格,激振台采用默认网格划分,网格大小均由Mesh Sizing控制,其大小均为20mm,最后划分出的有限元模型共有133405个节点,54148个实体单元,如图2所示。
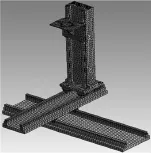
图2 三坐标测量主机虚拟样机有限元模型
2 样机静力学分析
三坐标标定机静态定位精度在很大的程度上取决于其静态特性,因此对所建立的虚拟样机有限元模型进行静力学和静态特性分析[6]。
为了研究GPS的动态特性,需要在Z轴滑块上安装HEV-50型高能电动式激振器对GPS进行激振。综合考虑激振器和GPS的自重,确定作用在Z轴滑块上的静态力F=50N,方向为竖直向下。
为了仿真三坐标标定机的工作状态,在进行静力分析时,采用X向工作台底部完全约束,并设置Bond接触类型,在激振台标定点O施加沿Z轴正向的力F,计算其静态位移,采用软件自带的探针Probe功能完成采集O点在X、Y、Z三各方向的变形量,分析结果如图3和表1所示。
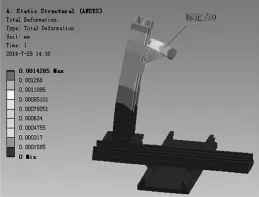
图3 三坐标标定机总的变形量
表1 标定点O静态分析结果
由表1可以看出,O点的最大变形量为9.8114× 10-4mm,,远小于三坐标标定机的0.1mm测量精度要求,因此所设计的三坐标标定机的静态定位精度可以满足设计要求,不需要进行误差补偿。
3 样机动态特性
3.1 模态分析
机床是一个复杂的振动系统,无限自由度的数量对应的是固有的频率和振型的不同模态,但并非所有的非模态的不稳定现象(共振),而模态分析主要集中在这些不稳定现象中[7]。模态分析可以很清晰的看到三坐标标定机的各部分振动振型情况,有利于研究机构动力学特性,以及科学避开共振、疲劳和受迫振动引起的机构破坏。
通过三坐标标定机的模态分析,可以得到其动态特性。由于模态分析是将非线性的系统进行线性化处理,因此各部分接触直接设置成默认刚性接触形式,对其X向工作台底部完全约束,不施加任何载荷进行求解。考虑网格划分实体单元数量,采用空间迭代法提取其前六阶模态频率以及前六阶模态振型[8-9],分别如表2、图4所示。

表2 前六阶模态固有频率
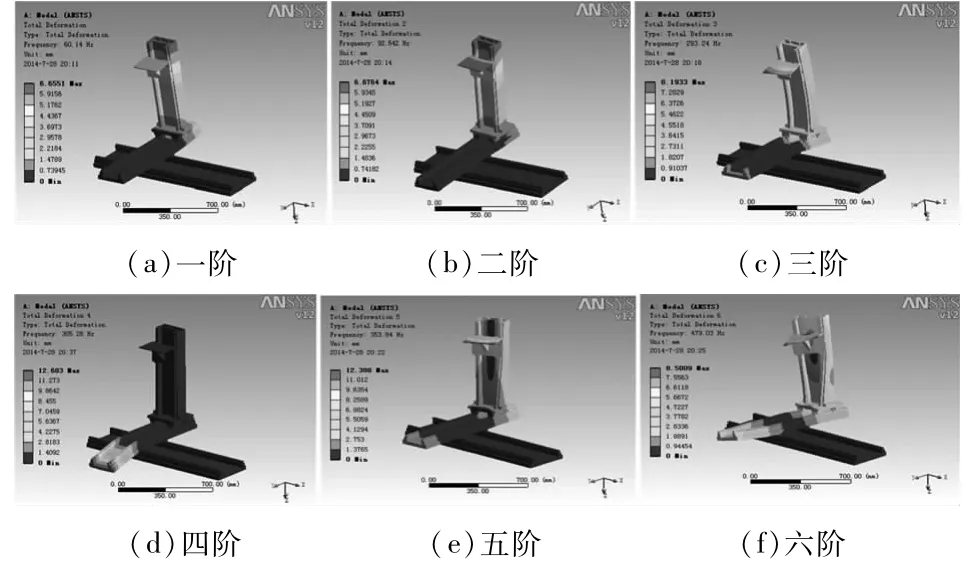
图4 三坐标标定机前六阶模态振型
根据相关计算及云图分析可知:前三阶振型主要发生在Z轴立柱上,沿Z轴做上下振动。第四阶振型主要发生在Y轴工作台上,沿Y轴做上下振动。后两阶振型主要发生在Z轴立柱和Y轴工作台上,两者主要绕Y、Z轴扭转,其中第六阶振型中的Y轴工作台绕Y轴扭转较第五阶振型更为剧烈。由表2可知,三坐标标定机一阶模态大小为60.14Hz,将不会与HEV-50型高能电动式激振器设定的工作频率1Hz发生共振现象。
3.2 瞬态动力学分析
由于激振器安装在三坐标标定机上,在运动过程中会随机对GPS进行激振,以研究GPS的动态特性,因此三坐标测量机也会受到激振器瞬态激励的作用。为了研究三坐标标定机在瞬态激励作用下的定位精度,下面利用Ansys软件对标定机进行瞬态动力学分析。在分析标定点O稳态解之前,需综合考虑直线导轨特性及实际运动情况,合理设置分析条件及参数。具体设置如下:所有直线导轨均设置成frictional接触模式,摩擦因子为0.03,且利用软件内置选项body-body设置导轨运动副(translational),X向工作台底部完全约束。本文主要计算一阶模态下的瞬态响应情况,因此设置起始时间步长为0.0008s,最小最大步长分别设置为0.001s、0.005s,结束时间设置成1s[10]。在激振台标定点O施加沿Z轴的载荷F0=50sin(2πt)N,利用完全法(Full)进行机构瞬态动力学分析,同样利用软件自带的探针Probe功能完成O点的变形量数据采集,并通过MATLB绘制标定点O变形量曲线,分析结果如图5所示。
由图5可知标定机的最大变形量为1.6053× 10-5mm,标定点O在单周期(即1s)内的最大变形量在1.5×10-5mm以内,远远小于所设计的三坐标标定机要求的定位精度0.1mm。因此可以看出激振器的瞬态激励不会影响所设计的三坐标标定机的定位精度。
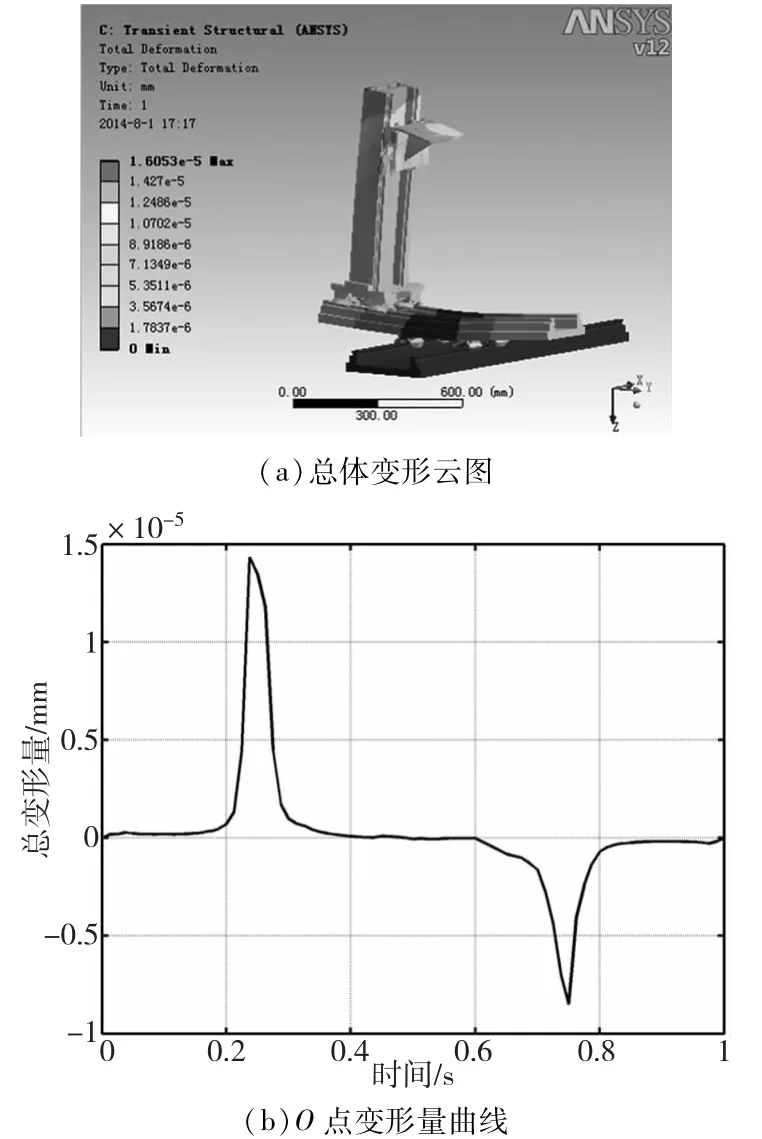
图5 瞬态动力学分析总体变形云图和O点变形量
4 结论
通过建立有限元模型并利用静力学分析、模态分析和瞬态动力学分析,掌握了所设计的三坐标标定机的结构静态特性,分析了其固有模态及各阶振型特性,深入研究了标定机的静、动态定位精度。分析结果表明,所设计的三坐标标定机的结构牢固,结构的精力和瞬态动态特性对其动、静态定位精度影响不大,完全可以满足0.1mm的定位精度设计要求。
[1]薛志宏.GNSS动态变形测量关键技术研究[D].郑州:解放军信息工程大学,2012.
[2]李伟.GNSS算法研究及其在变形监测中的应用[D].成都:西南交通大学,2013.
[3]陈宝刚.结晶器多维坐标尺寸自动测量机的研制[D].合肥:合肥工业大学,2007.
[4]金飞翔,陈晓怀,杨洪涛,等.悬臂梁式三坐标测量机的误差分析与修正[J].工具技术,2007,41(1):95-98.
[5]古成中,吴新跃.有限元网格划分及发展趋势[J].计算机科学与探索,2008,2(3):248-259.
[6]杨洪涛,费业泰,陈晓怀,等.纳米三坐标测量机的误差分析与分离[J].安徽理工大学学报(自然科学版),2010,30(3):36-40.
[7]Hao Yang,Wu Yang,Daming Wang Engine Manufacturing Department ME SAICGM Wuling Automobile Co.,Ltd.Liuzhou China.Dynamic Characteristic Analysis On Machine Tool By Ansys[C].Wuhan:2011 IEEE 2nd International Conference on Computing,Control and Industrial Engineering(CCIE 2011),2011:223-226.
[8]谭冬梅,姚三,瞿伟廉.振动模态的参数识别综述[J].华中科技大学学报(城市科学版),2002,19(3):73-78.
[9]王利军,贾振元,卢晓红,等.立式微型数控铣床整机结构的有限元分析[J].组合机床与自动化加工技术,2009(12):12-16.
[10]高耀东,李儒,宿福存,等.ANSYSWorkbench机械工程应用精华30例[M].北京:电子工业出版社,2013.
(编辑 李秀敏)
Structure Design and Characteristics Analyzes of the Three Coordinates M easuring M achine for Calibrating GPS Positioning Precision
ZHANGWen-chong1,YANG Hong-tao1,WANG Fu-yuan2
(1.SchoolofMechanical Engineering,AnHuiUniversity of Science and Technology,Huainan Anhui232001,China;2.School of Mechanical Engineering,Yancheng Institute of Technology,Yancheng Jiangsu 224000,China)
While using the three coordinates measuring machine to calibrate the positioning accuracy of GPS,the static and dynam ic characteristics ofmachine w ill affect the positioning accuracy in some extent. To ensure the structural strength and confirm the positioning accuracy of the three coordinatesmeasuringmachine,the 3D model of three coordinatesmeasuring machine was established in this paper,whose statics,modal and transient dynamics simulation analysiswere processed by using Ansys FEA method in order to research its relevant dynam ic characteristics and positioning error range of the specific point position.The simulations analysis results reveal that the three-dimensional static positioning error of the calibration machine is less than 0.0001mm and needn′t to be compensated.The inherent frequencies of the three coordinatesmeasuring machine aremuch higher than the vibration frequencies of the installed vibrator and resonance can not emerge under the excitation of installed vibrator.The dynamic positioning accuracy of the three coordinates measuring machine is far less than the requirement of design precision 0.1mm under the vibration action of the vibrator.So the designed three coordinatesmeasuring machine can be used in the research of GPS dynam ic characteristics.
three coordinatesmeasuring instrument;prototypemodeling;statics analysis;dynam ic characteristics analysis
TH165;TG659
A
1001-2265(2015)07-0053-04 DOI:10.13462/j.cnki.mmtamt.2015.07.015
2014-11-05
2014安徽理工大学科研项目立项(ZY1449)
张文宠(1990-),男,安徽安庆人,安徽理工大学硕士研究生,研究方向为机械电子工程,(E-mail)dharvest2009@163.com。
猜你喜欢
中国特种设备安全(2022年4期)2022-07-08
装备制造技术(2020年4期)2020-12-25
防爆电机(2020年3期)2020-11-06
房地产导刊(2020年6期)2020-07-25
智富时代(2019年4期)2019-06-01
智富时代(2019年4期)2019-06-01
北京航空航天大学学报(2017年8期)2017-12-20
中国棉花(2017年10期)2017-11-04
雷达学报(2017年1期)2017-05-17
中国石油大学学报(自然科学版)(2015年2期)2015-11-10
