
形态学开运算在车型图像去噪中的应用
2015-11-05 07:09宓超凤宇飞
中国科技信息 2015年18期
沈 阳 宓超 凤宇飞
形态学开运算在车型图像去噪中的应用
沈 阳 宓超 凤宇飞
本文提出了一种用形态学开运算对基于二维激光雷达的车型图像进行快速去噪的方法,这类车型图像不是直接通过摄像头拍摄获得,而是由激光雷达及其他辅助设备对车辆的侧面二维轮廓进行扫描并重建,再对重建后的车辆三维点云数据进行栅格化以及灰度化而得到的。该项研究适用于通过激光雷达而获取到的车型图像进行有效去噪,能够将环境中由大颗粒灰尘、雾气、雨水以及其他噪声点去除,其去噪效果快速、彻底。
近些年来,国内外交通领域已经逐步朝着自动化、智能化的方向发展,许多系统及业务也开始由传统的人工转向设备自动完成,这样可以有效地减少交通拥堵,提高工作效率,降低了人工成本。当前在交通领域中,车型识别技术被广泛用于道口自动发卡、自动收费、车流监管等方面,为交通领域的高速发展提供了技术基础。目前用于车型识别的技术主要有:基于非接触式智能卡的车型识别系统;基于光幕及轴距检测车型识别系统;基于摄像头图像的车型识别系统。但上述车型识别技术存在着诸如无法识别套牌、电子标签乱贴;体积庞大、不便移动;受到背景环境及天气影响严重等缺点。
本课题设计了一种基于激光雷达的车辆识别系统,其通过二维激光直接测量车辆的侧面轮廓信息,车型三维图像不受环境、温度等影响,系统硬件结构简单、识别率高、无车载辅助设备,因此有效地改善了上述问题。
基于激光雷达的车辆识别系统结构设计
常见的车型识别系统主要由各种传感器、通信模块、数据处理模块及终端响应模块组成。本课题使用的是由德国SICK公司生产的室外型激光扫描雷达作为主要传感器部分来检测室外车辆轮廓,具有抗干扰性能强、通信接口多样、检测距离大等特点,被广泛应用于港口设备定位、无人车辆导引区域防护中。通信接口采用的是基于TCP/ IP协议的以太网通信,能够将大量的点云坐标数据快速传入计算机进行模型重建及特征匹配,配以车速检测模块得出车辆的形状,并将对应方案发送给终端响应模块,根据车型的不同进行对应的处理工作。
车型识别流程框图如图1所示。系统通过激光雷达扫描车辆的侧面二维轮廓信息,配合其他辅助装置完成车型三维轮廓的拼接,重建出车型三维点云模型。在将三维点云进行图像的二维灰度化及开运算去噪处理,得到可靠性较高的图像。在针对各种车型特征进行特征提取后,将得到的特征信息送入分类器中分类识别。
车型图像去噪处理
图像的预处理是图像识别过程中一个不可或缺的过程。为了准确识别图像中潜在的信息,不仅需要保证图像能够真实反映原始物体的特征属性,还需要最大限度地减少图像中无效的干扰点。使用激光雷达扫描车辆外型,相比于基于摄像头图像的车型识别技术,其能够极大地降低周围环境及天气给原始图像数据带来的干扰,但却不能完全消除这些干扰。因为当出现大雾、大雨、车辆行驶扬尘时,由于激光束自身特性,还是会有产生少量噪声点。因此,需要采取手段对消除噪声点。
对车型图像去噪之前,需要将车辆三维模型进行灰度化转换后得到的二维车型灰度图。该图像区别于传统的灰度图,其灰度值表示的是车辆到雷达的水平距离。

图1 车型识别流程框图
在此基础上,在对图像中车型特征进行提取前的预处理滤波算法是图像形态学中一种比较常用的消除干扰的算法,叫做开运算。其是指先对图像腐蚀运算再对其膨胀运算的过程。图像处理时通常用此过程来消除小的对象物体、在纤细点处分离物体、平滑较大物体的边界的同时对其面积作大的改变。与腐蚀算法的作用无明显区别,但相对于腐蚀操作消除掉若干层图像,开运算能够保证图像原有大小基本不变,从而实现在去噪的同时,尽可能多的保留原始车型图像信息。
在图像形态学中,开运算的公式表示为:

其中:
X为被处理的图像;
B为结构元素,用来处理X的图像;
设图像X为待处理的图像,即本文中的车型轮廓灰度图,而B为形态学的基本算子,通常被称为结构元素。车型特征提取中选择的结构元素为的像素块,这样即可以删除大部分噪声点,又可以保留车型图像特征。开运算具体实现过程如下:
(1)用结构元素B遍历图像X上所有的像素点,经过平移a步后得到Ba,如果Ba包含于X,则该点被保留,否则被抛弃。这样的操作被称为腐蚀操作。公式表示为:

(2)用结构元素B遍历腐蚀后的图像X’上所有的像素点,经过平移a后得到Ba,若Ba与X’的交集非空,这样的操作被称为膨胀操作。公式表示为:

实验结果
通过上述介绍的基于激光雷达的车型点云图像灰度化以及对车型的灰度图像应用腐蚀膨胀算法进行了现场实验,图3为实验结果,图(a)为原型箱式货车,考虑到速度检测设备的灵敏性,车辆以不高于20km/h的速度通过激光雷达及车速检测设备,得到的三维点云数据进过二维灰度化转变成含有噪声的灰度图(b),再通过形态学开运算去噪后得到清晰的二维图像(c),经过数百个车型样本的统计,其识别速度具备保持在80ms以内。
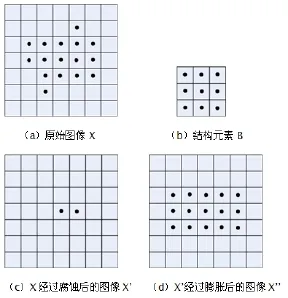
图2 开运算示意图
结语
本文中运用形态学开运算对基于激光雷达的车型灰度图像去噪,从实验结果中可以看出,去除离散噪声点速度快速、效果良好,尤其是在车轮底部因为车辆行驶过程中带起的扬尘噪点,基本都被算法清理干净,同时,车辆轮廓中由于雷达激光分辨率限制而产生的间隙,则得到了最大限度的补充,使得车型特征得到最大程度的保留及还原,为后续图像识别中的特征提取操作提供了可靠保证。
沈 阳 宓超 凤宇飞
上海海事大学
10.3969/j.issn.1001-8972.2015.18.016
猜你喜欢
北京测绘(2022年5期)2022-11-22
汽车观察(2021年8期)2021-09-01
装备制造技术(2020年1期)2020-12-25
制造技术与机床(2019年11期)2019-12-04
中国临床医学影像杂志(2019年2期)2019-04-25
中国交通信息化(2019年1期)2019-03-26
中国医学影像学杂志(2018年9期)2018-10-17
电子制作(2018年16期)2018-09-26
中国交通信息化(2017年4期)2017-06-06
中国当代医药(2015年36期)2015-03-11
