
考虑自动驾驶仪特性的自适应模糊动态面滑模制导律设计
2015-11-11 01:32商巍唐胜景郭杰马悦悦张尧
兵工学报 2015年4期
商巍, 唐胜景, 郭杰, 马悦悦, 张尧
(北京理工大学 飞行器动力学与控制教育部重点实验室, 北京 100081)
考虑自动驾驶仪特性的自适应模糊动态面滑模制导律设计
商巍, 唐胜景, 郭杰, 马悦悦, 张尧
(北京理工大学 飞行器动力学与控制教育部重点实验室, 北京 100081)
针对导弹拦截高机动性目标的问题,基于自适应模糊逼近策略和动态面滑模控制思想,提出了一种新型的拦截制导律。建立了考虑自动驾驶仪动态延迟特性的弹目相对运动方程,以零化视线角速率为出发点,设计了基于自适应趋近率的动态面滑模制导律,同时设计了综合视线角速率以及弹目距离的自适应模糊方法,对变结构项进行逼近。仿真结果表明,针对高机动性目标,该制导方法能够有效地去除抖振,并且具有良好的制导精度。
控制科学与技术; 制导律; 自适应模糊逼近; 动态面滑模控制; 自动驾驶仪特性
0 引言
随着导弹突防技术的快速发展,其机动性越来越大,针对高机动性导弹的拦截面临着巨大的挑战。现有的末制导律很难满足针对高机动性目标的有效拦截,寻求高精度、高鲁棒性的制导律是提高导弹制导性能的关键因素。
工程中常用的制导律是比例导引,然而比例导引律命中点的法向过载与此时目标的运动状态直接相系[1]。在攻击高机动性目标时,导弹接近目标时的视线角速率会发散。滑模控制对系统的摄动和外部扰动具有很强的鲁棒性,因此可采用滑模思想设计制导律拦截高机动目标。文献[2]采用滑模制导律,目标机动项被认为是有界不确定的,只需知道目标运动的有界值。文献[3]提出了一种基于2阶滑模控制技术的制导律。文献[4]应用滑模控制方法,滑模面选为零效脱靶量,设计了集驾驶仪和制导于一体的滑模控制器,通过估计剩余时间,提高了拦截机动目标的精度。文献[5-8]采用一种滑模导引律,设计了一种自适应趋近率,对系统干扰以及参数摄动具有一定的鲁棒性,但切换系数的选择很大程度上依赖于目标的运动情况。
然而滑模制导律存在着抖振的问题,严重影响了其在工程中的应用。针对滑模控制的抖振问题,更多地采用饱和函数法去除抖振影响[9-12],但由于目标机动的不确定性,切换增益的取值难于确定,取值不当会导致系统性能差。
文献[13]采用模糊控制技术,通过估计目标的加速度选取开关项的大小,从而达到减弱抖振的目的,由于不同目标的机动性不同,因此很难获得目标加速度的估计值。文献[14]采用自适应模糊系统对不确定函数进行逼近,获得变增益的能力,有效地提高了制导精度和鲁棒性,然而由于变结构项的存在,视线角速度在制导末段依旧产生了抖振现象。
针对上述问题,采用自适应模糊方法逼近变结构项,能够有效地去除抖振的现象。模糊系统输入综合视线角速率和弹目距离信息,降低末制导初始时刻的过载,同时使系统能够快速地趋近于滑模面,使视线角速率始终在零附近,增强抗干扰能力,并且克服了变结构项系数难以确定的问题。此外,针对考虑自动驾驶仪动态延迟性能的弹目运动方程,采用自适应趋近率的动态面滑模方法设计制导律,在保证制导精度的同时,可消除微分项的膨胀,使制导律中参数的获取简单,具有工程应用的价值。与传统比例导引和采用饱和函数法的滑模制导律进行对比仿真,结果表明,针对不同情况的高机动性目标,本文所设计的方法能够满足制导精度和鲁棒性的要求。
1 末端制导模型描述
为了简化问题,仅考虑纵向平面内的导弹制导问题,弹目相对运动关系如图1所示。

图1 弹目相对运动关系Fig.1 Motion relation between missile and air target
图1中:r为导弹与目标的距离,vM为导弹的速度,aM为导弹的垂直速度方向的加速度,θM为导弹弹道倾角;q为目标视线角,vT为目标速度,aT为目标垂直速度方向的加速度,θT为目标航迹角。
根据图1,得到弹目相对运动关系方程组:

(1)

(2)
σM=q-θM,
(3)
σT=q-θT,
(4)
(5)
(6)
在实际制导过程中,导弹的自动驾驶仪都存在动态延迟特性,把导弹自动驾驶仪当作理想环节所设计的导引性能难以保证,故研究基于自动驾驶仪动态特性的导引律更具工程意义。根据文献[15],导弹的自动驾驶仪动态特性可近似为一阶惯性环节,其表达形式为
(7)



(8)
2 自适应动态面滑模导引律设计
s1=x2.
(9)
其初始值s1(0)=x2(0),对s1进行求导可得

(10)
根据系统(8)式,选取自适应滑模趋近率为

(11)
式中:k1和ε均为大于0的常数。
由(10)式、(11)式可得控制量

(12)

(13)


(14)
式中:T2为滤波器的时间常数。可得
(15)
选取第2个切换函数为s2=x3-x3c,选择合适的控制量u使得s2在有限的时间内趋向于0.
对s2进行求导,得

(16)
取控制量u为

(17)
式中:k2为大于0的数。
假设1系统(8)式中所有的状态量和控制量都是有界可测。
假设2在末制导过程中,导弹的速度大小不变。
定理1对于系统(8)式,采用导引律(13)式和(17)式,若选取变结构项系数ε≥L,其中L为正常数,则系统中视线角速率能够在有限的时间内收敛到0.
证:选取Lyapunov函数

(18)
对V1进行求导

则

(19)

由(19)式可知,ε的取值与D有关,但是由于目标的机动不确定,D很难估计,导致ε的取值很难确定,若ε的取值过小,无法满足系统的稳定条件而导致系统发散;若ε的取值过大,由于变结构项的存在则会导致系统产生严重抖振。由于模糊系统具有逼近特征,因此采用自适应模糊逼近方法对切换项进行逼近,用连续的函数代替切换项,不需要再对变结构项系数进行取值,避免其取值不当对制导系统造成的不良影响,保证系统能够收敛的同时,达到消除抖振的目的。
3 自适应模糊逼近变结构制导律设计

采用乘积推理机,单值模糊器和中心平均解模糊器[17],得

(20)

(21)
自适应律(21)式中,η的初值一般取为0,为了保证自适应模糊系统的逼近精度,ξ为自适应参数。
则制导律的控制量变为

(22)

(23)
定理2对于系统(8)式,采用自适应模糊系统对导引律进行设计,所设计的自适应模糊动态面滑模制导律(22)式、(23)式,使用自适应律(21)式调节η,则系统能够保证视线角速率在有限时间内收敛到0.

(24)
其中最优参数

(25)
建立如下Lyapunov函数:

(26)


由Lyapunov稳定性可知,(22)式、(23)式给出的自适应模糊动态面滑模制导律能够满足在制导末段视线角速率趋于0. 证毕。
设计的制导律中所需要的变量有视线角、视线角速率、弹目相对距离以及弹目相对距离变化率,这些变量均可以通过测量或估计获得。
对于制导律的控制量(23)式、(24)式而言,为了保证Lyapunov稳定性,要求k1和k2大于0,T1为1阶延迟环节的时间常数,T2为1阶动态滤波器的时间常数。
4 示例仿真
导弹在参考坐标系的初始位置为xM0=0,yM0=0,初始弹道倾角为0°,速度为vM=380 m/s. 本文所采用的自适应模糊动态面模糊制导律(AF-SMG),系统参数取值k1=2,k2=4,η的初始值均为0,ξ=100. 自动驾驶仪1阶惯性环节时间常数为20 ms,1阶动态滤波器T2=0.01 s.
4.1自动驾驶仪延迟特性对制导特性的影响
目标的初始位置为xT0=4 000 m,yT0=300 m,其初始速度为100 m/s. 目标运动为θT=50cost/vT的余弦机动,初始倾角θT0为0°. 基于AF-SMG分析自动驾驶仪延迟特性对制导特性的影响,选取1阶惯性环节时间常数T11=0.1 s,T12=0.5 s,其对应制导律记为AF-SMG-0.1和AF-SMG-0.5. 为与AF-SMG-0.5对比,将不考虑自动驾驶仪延迟特性的制导律记为NAD,并进行仿真。仿真结果如表1和图2~图5所示。
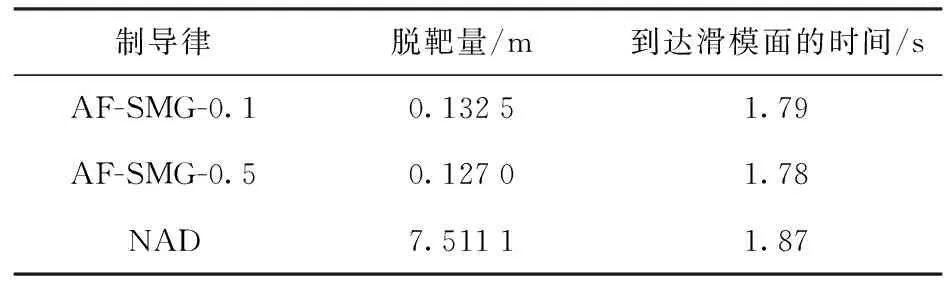
表1 AF-SMC-0.1、AF-SMC-0.5和NAD仿真结果
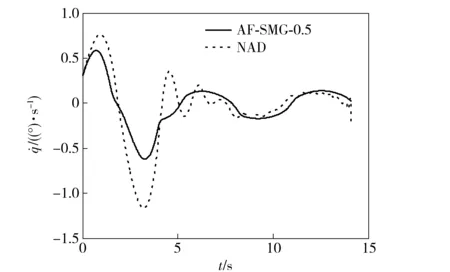
图2 AF-SMG-0.5和NAD视线角速率变化Fig.2 Variations of LOS angular velocity under AF-SMG-0.5 and NAD
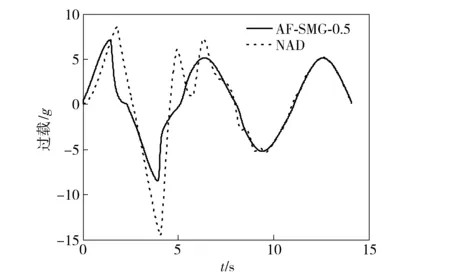
图3 AF-SMG-0.5和NAD过载变化Fig.3 Variations of overload command under AF-SMG-0.5 and NAD
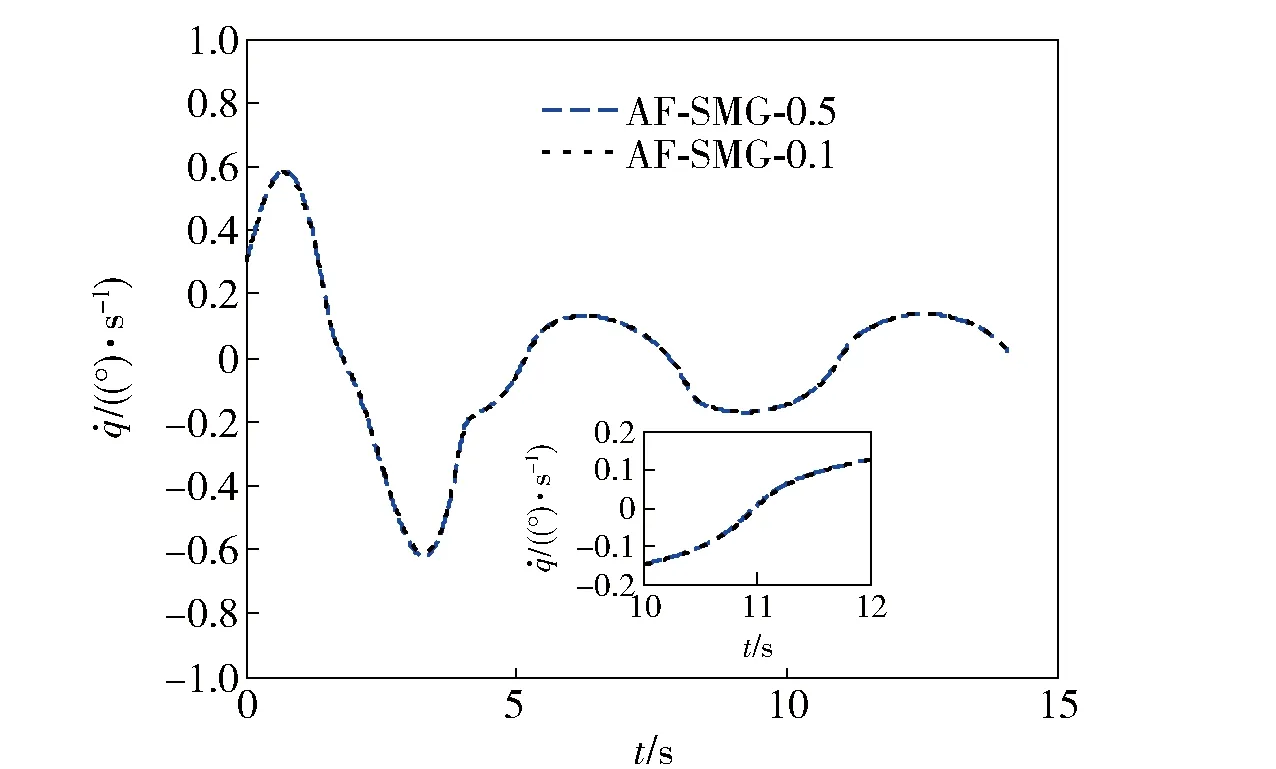
图4 AF-SMG-0.1和AF-SMG-0.5视线角速率变化Fig.4 Variations of LOS angular velocity under AF-SMG-0.1 and AF-SMG-0.5

图5 AF-SMG-0.1和AF-SMG-0.5过载变化Fig.5 Variations of overload command under AF-SMG-0.1 and AF-SMG-0.5
从表1和图2、图3可以看出,由于NAD没有考虑1阶惯性环节的延迟特性,因此相对于AF-SMG-0.5,其过载在10 s之前具有滞后效应,从而导致视线角速率无法很快收敛并稳定在滑模面的附近。在末制导末段,拦截器接近目标时,惯性环节的延迟特性导致制导系统视线角速率发散,并造成较大的脱靶量。由表1和图4、图5可以看出,AF-SMG-0.1和AF-SMG-0.5的过载指令以及视线角速率基本重合,1阶惯性环节时间常数的变化对AF-SMG的制导性能影响不大。
4.2目标做余弦机动
目标初始状态以及目标的机动情况与4.1节相同,针对此种余弦机动目标进行仿真,仿真结果如表2和图6~图9所示。
表2 AF-SMC、SF-SMC和PNG仿真结果

图6 视线角速率变化Fig.6 Variations of LOS angular velocity
图7 过载变化Fig.7 Variations of overload command

图8 自适应模糊系统输出Fig.8 Output of adaptive fuzzy system

图9 导弹和目标运动轨迹Fig.9 Motion tracks of missile and target
从表2和图6可以看出:AF-SMG和SF-SMG-60在末制导初始阶段视线角速率能够快速地收敛到0;在末制导末段,由于SF-SMG-60中变结构项系数过大,导致系统产生抖振,而AF-SMG采用自适应模糊逼近的方法替代符号函数,可有效地去除抖振,改进了制导性能,提高了制导精度。由图7可知:AF-SMG初始时刻过载很小,随后过载逐渐增大,确保视线角速率能够快速地收敛到0;在制导末段,SF-SMG-60具有明显的抖振,AF-SMG去除接近目标时的抖振,这是由于AF-SMG综合视线角速率和弹目距离的信息进行控制,通过自适应模糊逼近方法,将产生抖振的符号函数改变为连续函数,在保证制导性能的前提下,有效去除了系统的抖振。自适应模糊系统的输出曲线如图8所示。由图6和图7可以得到,由于SF-SMG-20中变结构项的取值过小,无法保证系统的稳定性,PNG难以克服目标机动的影响,因此SF-SMG-20和PNG造成视线角速率在末制导开始就发散,脱靶量较大。图9为纵向平面内导弹和目标的运动轨迹。
4.3目标做不规则机动
目标初始位置及速度与4.1节相同,目标的法向加速度如图10所示。针对此种不规则机动目标进行仿真,仿真结果如表3和图11~图14所示。

图10 目标法向过载Fig.10 Normal overload of target

制导律脱靶量/m到达滑模面的时间/sPNG3.0913SF-SMG-202.11642.97SF-SMG-601.89802.10AF-SMG0.34042.14

图11 视线角速率变化Fig.11 Variations of LOS angular velocity

图12 过载变化Fig.12 Variations of overload command
图13 自适应模糊系统输出Fig.13 Output of adaptive fuzzy system
图14 导弹和目标运动轨迹Fig.14 Motion tracks of missile and target
从表3和图11中可以看出,由于SF-SMG-60变结构项系数的取值能够在6 s之前保证系统的稳定性,因此视线角速率能够快速收敛并稳定于0附近,而在6 s之后,由于目标的法向加速度增大,SF-SMG-60变结构项系数的取值无法保证系统的稳定性,造成视线角速率发散并且需要较大的过载。图12为过载变化示意图,如图12所示,SF-SMG-20变结构项系数的取值一直无法保证系统的稳定性,同PNG相似,在末制导初始阶段,视线角速率就发散,在制导末段的过载较大,并造成较大的脱靶量。而AF-SMG采用自适应模糊系统代替变结构项,自适应模糊系统输出如图13所示,保证了系统的稳定性,因此在整个制导过程中,视线角速率稳定在滑模面附近,并具有较小的脱靶量以及良好的制导性能。图14为纵向平面内导弹和目标的运动轨迹。
最后,对比针对不同机动能力目标的仿真结果可知,SF-SMG的制导性能易受到变结构项系数取值以及目标机动能力的影响,变结构项系数的取值不当会造成制导系统的不稳定,而由于AF-SMG采用自适应模糊系统代替变结构项,在目标信息完全未知的情况下,依旧能够保证制导精度与制导性能。
5 结论
针对高机动性目标设计的动态面滑模制导律,本文采用了自适应模糊逼近的方法对变结构项进行逼近,克服目标机动不确定性导致变结构系数难以确定的问题,同时去除变结构系数取值不当造成系统的抖振,改善了制导性能。相比于饱和函数法,基于自适应模糊逼近的方法能够有效地去除滑模制导律的抖振问题,提高了末制导精度和系统的鲁棒性。自适应模糊系统综合视线角速率和弹目距离信息,降低末制导初始时刻的过载,确保视线角速率快速趋近于0,并使视线角速率始终在0附近,优化了系统动态品质,提高了制导性能。此外,在导引律设计过程中,采用动态滑模的方法补偿了自动驾驶仪延迟的影响,制导律参数获取简单,便于在工程中的应用。
References)
[1]钱杏芳,林瑞雄,赵亚男. 导弹飞行力学[M].北京:北京理工大学出版社,2006.
QIAN Xing-fang,LIN Rui-xiong,ZHAO Ya-nan.Flight dynamics of missiles [M].Beijing:Beijing Institute of Technology Press,2006.(in Chinese)
[2]Jongki M, Kiseok K, Youdan K. Design of missile guidance law via variable structure control [J].Journal of Guidance,Control,and Dynamics,2001,24(4):659-664.
[3]Shtessel Y B, Shkolnikov I A, Levant A. Smooth second-order sliding modes: missile guidance application [J].Automatica,2007,43(8):1470-1476.
[4]Shima T, Idan M, Golan O M. Sliding-mode control for integrated missile autopilot guidance[J]. Journal of Guidance, Control, and Dynamics, 2006, 29(2): 250-260.
[5]Zhou D, Mu C, Xu. Adaptive sliding-mode guidance of a homing missile[J]. Journal of Guidance, Control, and Dynamics, 1999, 22(4): 589-594.
[6]Zhou D, Qu P, Sun S A. Guidance law with terminal impact angle constraint accounting for missile autopilot[J]. Journal of Dynamic Systems, Measurement, and Control, 2013, 135(5): 051009.
[7]佘文学, 周军, 周凤岐. 一种考虑自动驾驶仪动态特性的自适应变结构制导律[J]. 宇航学报, 2003, 24(3): 245-249.
SHE Wen-xue, ZHOU Jun, ZHOU Feng-qi. An adaptive variable structure guidance law considering missile’s dynamics of autopilot [J]. Journal of Astronautics, 2003, 24(3): 245-249.(in Chinese)
[8]孙胜, 张华明, 周荻. 考虑自动驾驶仪动特性的终端角度约束滑模导引律[J]. 宇航学报, 2013, 34(1): 69-78.SUN Sheng,ZHANG Hua-ming,ZHOU Di.Sliding mode guidance law with autopilot lag for terminal angle constrained trajectories [J]. Journal of Astronautics, 2013, 34(1): 69-78.(in Chinese)
[9]贾庆忠, 刘永善, 刘藻珍. 电视制导侵彻炸弹落角约束变结构反演制导律设计[J]. 宇航学报, 2008, 29(1): 208-214.
JIA Qing-zhong,LIU Yong-shan,LIU Zao-zhen.Variable-structure backstepping guidance law with terminal angular constraint for video-guided penetrating bomb[J]. Journal of Astronautics, 2008, 29(1): 208-214.(in Chinese)
[10]王晓芳, 郑艺裕, 林海. 基于扰动观测器的终端角约束滑模导引律[J]. 系统工程与电子技术, 2014, 36(1): 111-116.
WANG Xiao-fang,ZHENG Yi-yu,LIN Hai.A sliding mode guidance law with impact angle constraint based on disturbance observer[J]. Systems Engineering and Electronics, 2014, 36(1): 111-116.(in Chinese)
[11]熊俊辉, 唐胜景, 郭杰,等. 基于模糊变系数策略的迎击拦截变结构制导律设计[J]. 兵工学报, 2014, 35(1): 134-139.
XIONG Jun-hui,TANG Sheng-jing,GUO Jie,et al.Design of variable structure guidance law for head-on interception based on variable coefficient strategy[J]. Acta Armamentarii, 2014, 35(1): 134-139.(in Chinese)
[12]高峰, 唐胜景, 师娇, 等. 一种改进的自适应滑模变结构导引律[J]. 弹道学报, 2013, 25(3): 18-23.
GAO Feng,TANG Sheng-jing,SHI Jiao, et al.An improved adaptive sliding-mode navigation guidance law with variable structure[J]. Journal of Ballistics, 2013,25(3): 18-23.(in Chinese)
[13]刘永善, 刘藻珍, 李兰忖. 攻击机动目标的被动寻的模糊变结构制导律研究[J]. 系统工程与电子技术, 2007, 29(2): 254-258.
LIU Yong-shan,LIU Zao-zhen,LI Lan-cun.Research on fuzzy variable structure guidance law for passive homing missiles against maneuvering targets [J]. Systems Engineering and Electronics, 2007, 29(2): 254-258.(in Chinese)
[14]陈宇, 董朝阳, 王青, 等. 直接侧向力控制导弹的自适应模糊变结构末制导律设计[J]. 宇航学报, 2006, 27(5): 984-989.
CHEN Yu,DONG Chao-yang,WANG Qing, et al.A terminal guidance law design for side jet control missile based on adaptive fuzzy variable structure control [J]. Journal of Astronautics, 2006, 27(5): 984-989.(in Chinese)
[15]Zrachan P. Tactical and strategic missile guidance[M]. US: American Institute of Aeronautics and Astronautics, 1997.
[16]Swaroop D, Hedrick J K, Yip P P, et al. Dynamic surface control for a class of nonlinear systems[J]. IEEE Transactions on Automatic Control, 2000, 45(10): 1893-1899.
[17]Shaocheng T, Jiantao T, Tao W. Fuzzy adaptive control of multivariable nonlinear systemsl[J]. Fuzzy Sets and Systems, 2000, 111(2): 153-167.
Design of Adaptive Fuzzy Dynamic Surface Sliding-mode Guidance Law Considering Autopilot Lag
SHANG Wei, TANG Sheng-jing, GUO Jie, MA Yue-yue, ZHANG Yao
(Key Laboratory of Dynamics and Control of Flight Vehicle, Ministry of Education, Beijing Institute of Technology, Beijing 100081, China)
Based on adaptive fuzzy approach strategies and dynamic surface sliding mode control techniques, a novel interception guidance law is proposed for the problem that a missile attacks a high maneuvering target. Relative motion equations of missile and target are established accounting for autopilot lag. Based on the annihilating idea of the missile-target LOS(line-of-sight) angular velocity, a dynamic surface sliding mode guidance law is designed with adaptive reaching law. Meanwhile, the adaptive fuzzy method based on integrated the LOS angular velocity and missile-target distance is adopted to approach variable-structure term. The simulation results show that this law can remove chattering phenomenon. Moreover, this law has higher guidance precision to high maneuvering.
control science and technology; guidance law; adaptive fuzzy approach; dynamic sliding-mode control; autopilot lag
2014-04-30
国家自然科学基金项目(11202024)
商巍(1989—),男,博士研究生。E-mail:shw2012@bit.edu.cn;
唐胜景(1959—),男,教授,博士生导师。E-mail:tangsj@but.edu.cn
TG156
A
1000-1093(2015)04-0660-08
10.3969/j.issn.1000-1093.2015.04.013
猜你喜欢
弹箭与制导学报(2022年2期)2022-06-06
特区文学·诗(2021年6期)2021-12-22
军民两用技术与产品(2021年8期)2021-11-24
兵器装备工程学报(2021年9期)2021-10-15
舰船电子工程(2021年4期)2021-05-25
青年文学家(2020年22期)2020-08-31
兵器装备工程学报(2017年4期)2017-04-28
导航定位与授时(2016年1期)2016-03-16
当代贵州(2015年19期)2015-06-13
制导与引信(2015年3期)2015-04-20
