
一种基于终点弹道气动噪声及落地声分析的未爆弹探测技术
2015-11-18 06:09张亚辉王玉龙刘皓挺李宏凯朱望飞余琴兰
兵工学报 2015年8期
张亚辉,王玉龙,刘皓挺,李宏凯,朱望飞,余琴兰
(1.中国华阴兵器试验中心,陕西华阴714200;2.北京航天控制仪器研究所,北京100094)
一种基于终点弹道气动噪声及落地声分析的未爆弹探测技术
张亚辉1,王玉龙1,刘皓挺2,李宏凯1,朱望飞1,余琴兰1
(1.中国华阴兵器试验中心,陕西华阴714200;2.北京航天控制仪器研究所,北京100094)
针对常规兵器靶场试验、部队训练及演习过程中非爆弹定位困难的问题,介绍了一种采用低成本声学传感器的终点弹道未爆弹探测技术。根据弹着区范围,布置若干声学传感器,保证其测量范围覆盖整个弹着区。对于每一个声学传感器采集到的气动噪声及落地声信号,执行以下计算步骤:采用快速傅里叶变换与拉普拉斯小波分析技术进行声学信号的降噪与增强;采用短时能量、短时幅度以及短时过零率进行气动噪声与落地声端点检测;采用小波包分析技术提取降噪增强后声学信号的特征;采用基于最小距离的阈值准则进行终点弹道气动噪声及落地声的识别。靶场试验未爆弹落点粗定位结果显示,文中所提技术可用于未爆弹落地点定位,定位精度可达10 m.
兵器科学与技术;未爆弹;端点检测;小波分析;特征识别;声定位
0 引言
未爆弹(UXO)[1]是指火炮射击时弹丸击中靶标或落地过程中没有发生爆炸的一类出现异常状况的弹丸。造成弹丸没有正常爆炸的原因很多,如产品的设计缺陷、自身的生产质量问题,或环境因素导致的产品失效等。在历次打靶试验中,虽然UXO出现的概率较低,但一旦UXO出现,则造成潜在的危害非常大。如果不进行UXO的回收,很有可能在未来造成弹着区人员的伤害与财产的损失,因此有必要进行UXO识别、定位与回收技术的研究。与正常爆炸的弹丸相比,UXO在落地时不会产生爆炸冲击的声波与火光,不会造成较大的扬尘,且一般也不会暴露在地表,只会在地面留下一个弹孔,因此进行UXO的定位与搜索非常困难。
国外在上述领域的研究起步较早,目前主流的研究方法包括磁法探测技术[2]、探地雷达探测技术[3]等。磁法探测技术通过磁传感器探测弹丸产生的磁场强度,采用模式识别技术进行UXO的搜索与探测;探地雷达则通过主动发射和接收特定频谱的信号,对地面以下的UXO进行定位。国内在该领域的研究起步较晚,相关研究工作开展的较少[4-5]。在实际应用中,目前主要还是通过人工搜索的方式进行UXO的弹孔定位。如在国内某靶场试验时,为了搜索UXO,需要出动上百人员进行拉网式排查搜索。相比较而言,磁法探测技术探测范围较小,比较适合于在进行完UXO的弹着区粗定位后,再利用上述技术进行精确地UXO搜寻;探地雷达技术则成本较高,需要借助专用的大型仪器设备。另外,由于靶场常年试验遗留的弹片很多,也会影响磁法探测技术和探地雷达的使用,因此上述两类技术在靶场试验过程中都较为受限。
为了解决上述问题,本文提出了一种采用声学分析[6]的终点弹道UXO识别与粗定位技术。首先分析了终点弹道UXO气动噪声及落地声的声学特性;其次,提出一种对靶场弹着区进行区域划分的方法,并在各个划分的区域布置低成本声学传感器,实现声信号的采集;再次,针对弹丸在飞行时的终点弹道所产生的气动噪声及落地声,采用小波分析技术提取弹丸气动噪声及落地声的特征,用以进行UXO声学特征与环境噪声及正常爆炸弹丸声学特征的区分;最后,根据声强衰减的大小,确定UXO的弹着区域,为UXO后续精确的搜索与定位提供依据。
1 UXO气动噪声与落地声声学特征
在常规兵器试验中,多数试验弹丸是以亚音速落地。当弹丸亚音速飞行时,光滑弹体与气流之间会产生“气动噪声”,即高速气流、不稳定气流,以及由气流与物体相互作用产生的噪声。结合大量的测试数据,不失一般性,可以认为亚音速飞行弹丸的气动噪声具有以下的特点:
1)弹丸飞行气动噪声是一个连续的声信号,出现在落地声或爆炸声之前。
2)飞行弹丸逐渐接近声探测器,气动噪声声压值是一个由小及大的过程,如果测试位置在落弹点与炮位之间,声压值还会有一个由大及小的过程。
3)在弹形系数基本一致时,弹丸飞行气动噪声声压值随弹丸飞行速度增大而增大、随弹丸体积增大而增大,另外气动噪声声压级常常低于落地声声压级。
4)迫击炮炮弹落地速度较低(200 m/s,低于0.75倍音速,不存在激波),有一部分气动噪声的产生与弹丸的尾翼旋转关系密切,整个声信号主频相对低,一般低于100 Hz;速度较高(一般高于280 m/s,高于0.75倍音速)落地的榴弹、加榴弹等,有一部分气动噪声属于激波,整个声信号主频相对低,一般主频高于200 Hz,但低于1 600 Hz.
落地声是弹丸与地面接触时产生的摩擦及振动的声学信号。结合大量的测试数据,常规兵器的弹丸在没有发生爆炸的情况下落地声具有以下特点:
1)弹丸落地声具有脉冲震荡衰减特性;
2)弹丸落地声出现在弹丸飞行气动噪声之后;
3)弹丸落地声主频较低,一般在17~80 Hz之间,能量多集中在20~40 Hz之间;
4)假设其他条件一致情况下,且弹丸速度没有超过音速时,落地声的声压随弹丸质量、落地速度增加而增大。
2 声传感器布站方法
进行声源定位的目的是为了快速有效地估计出UXO大致的位置,为后续的搜索工作提供支持和指导。与其他传感器探测技术相比,采用声学传感器粗定位技术,具有系统成本低、野外作业携带方便、结果可信度高等优点。
2.1 测量原理设计
传统的声源定位方法[7-9]包括:基于时间差的方法、基于声压比的方法、基于可控波束的方法,以及基于高分辨率谱估计的方法。基于时间差的方法主要利用到达不同声传感器之间时间差进行定位;基于声压比法则是根据声发射源信号在不同拾音器上所形成的声压的差异进行定位;基于可控波束形成器法是采用各传感器采集来的信号进行加权求和形成波束,通过搜索声源的可能位置来引导该波束,修改权值使得传感器阵列的输出信号功率量最大;基于高分辨率谱估计的方法则是采用通过获取了传感器阵列的声信号来计算空间谱的相关矩阵。
为了实现上述技术,一般需要研制特定的声学传感器,如定制麦克风阵列、声传感器矩阵等进行声信号的采集,而后通过对单个或多个传感器声信号的分析进行声源的高精度定位。然而在实际的靶场试验中,如果在距离射击区域较近的地方布置麦克风阵列,弹丸有可能对各类声传感器造成毁伤,应用该类传感器试验成本太高;如果在距离射击区域较远的地方布置麦克风阵列,则可能因为声信号太弱不能捕获目标。因此急需一种低成本的声传感器及其对应的定位方法来进行UXO的定位。
为了解决上述问题,如(1)式和(2)式中所示,为本文所设计的声学识别及定位技术。本文系统设计思想是在靶场按照一定规则布置多个低成本声学传感器进行弹丸终点弹道气动噪声及落地声的采集与分析,最终通过寻找各个传感器测量信号中声学指标最大的那个传感器所对应的区域作为UXO的候选搜索区域,再根据声学指标的大小与距离的经验信息进行UXO的粗定位。(1)式表示位置坐标Pc(x,y)的定位是通过求取声学指标最大的声传感器进行确定;(2)式表示该声学指标为距离、声源形状以及环境衰减因素等的函数。为了简化,在后续的讨论中将环境衰减因素加以忽略,或解释为多次测量试验的环境因素基本一致,故可将其忽略。通过上述方法的应用,可以实现对UXO的粗定位,后续可再采用如磁场强度传感器等技术进行UXO的精细定位,最终实现对UXO的搜寻。

式中:A(xi,yi)表示第i个声传感器所处的坐标位置;L*表示位置位于坐标“*”处的声传感器所采集到的声学指标的大小;F(d,s,e)表示F(*)为距离参数d、声源形状参数s及环境衰减参数e的函数。
2.2 布站方法设计
如图1中所示,为一种靶场声学传感器的布站方法。图1中左侧黑色的实心圆表示射击单元,包括迫击炮、加农炮、榴弹炮等,射击单元位于射击阵地;右侧黑色的小实心圆表示低成本声学测量装置,该装置位于弹着区域,其外侧对应的同心圆表示该装置的声学测量范围。采用上述布站方式,一方面实现了靶场弹着区声学测量的全覆盖,有效提高了对试验过程态势变化的监控能力;另一方面,由于各声传感器体积较小,在一般试验中被弹丸击中的概率极小,同时各个传感器的成本也很低,即便被击毁造成的经济损失也不大。
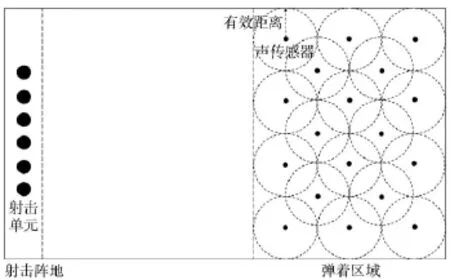
图1 靶场声传感器布站方法俯视示意图Fig.1 The top view of layout method of acoustic sensors in a range
本文所设计的布站方式具有以下特点:第一,采用专用声信号采集装置进行单个声测量基站硬件系统的网状布站,使得整个射击目标区域完全被声传感器所覆盖;第二,每个基站只采用一个声传感器采集声学信号,系统成本较低,声信号采集的有效范围近似为圆形区域;第三,绝大部分声信号采集装置的有效测量范围相互重叠。最终,在进行靶场试验中,各个基站采集声学信号,基站通过对传感器的声信号分析,识别出弹丸的非爆现象是否发生。如果目标被确定为UXO,再根据其他测量点获取的声学指标大小进行距离的粗定位。
3 声学特征分析方法
本文系统进行声学特征分析的关键技术主要包括:声信号的端点检测技术、声信号的降噪与增强技术、声信号的关键特征提取技术,以及UXO的声学识别技术。
3.1 声信号的降噪与增强技术
在进行野外环境下的声信号采集时,传感器容易受鸟鸣声、蝉鸣声、风声等的干扰,因此需要首先进行信号的降噪与增强处理。本文采用快速傅里叶变换(FFT)滤波器进行原始声信号的降噪以及拉普拉斯小波[10]进行原始信号的增强。FFT降噪技术较为常见,本文不再详述。在采用拉普拉斯小波进行信号增强时,可采用如(3)式中所示小波基函数。如令γ={ω,ξ,τ},则当γ={2,0.08,0},Ws=5 s时,该小波基函数的图像如图2中所示。从小波理论可知,复数小波可以实现光滑、连续的小波变换,从而保证信号的相位信息不失真。可以形象地说,拉普拉斯小波对信号的逼近不是通过简单的平移,而是像拧螺丝一样连续前进,因此它能观测到信号的每一个细节。
式中:参数{ω,ξ,τ}决定了小波的特性,ω∈R+表示频率,ξ∈[0,1)∈R+表示粘滞阻尼比,τ∈R为时间参数;系数A用来归一化小波函数;Ws表示小波紧支区间的宽度,它一般不需要显式表示。
图2 拉普拉斯小波Fig.2 Laplas wavelet
与气动噪声信号相比,落地声信号非常弱,尤其需要进行增强处理。根据对落地声信号分析的结果,落地声持续时间一般为100~150 ms,而在50 ms左右时约衰减到最大幅值的一半。如(4)式中所示,对这类微弱落地声信号的窗能量增强主要是运用一个50 ms的窗,从起始点逐步采样并向后推移,计算在50 ms内的信号能量,将其赋值给起始点,最终成为一个新的波形,新波形的每个点,代表了从该点起至50 ms内的信号能量。具体计算时,首先对原始信号进行拉普拉斯小波滤波,去除其他的杂波信号,再采用(4)式中的方法进行信号处理,最终实现信号增强的目的。

式中:m为采集频率;s(n)为原始信号的大小。
3.2 端点检测技术
UXO终点弹道的气动噪声及落地声一般均会持续几秒钟的时间,因此需要采用端点检测技术[11]将上述声信号进行有效分割。针对UXO的声学信号,需要进行4次端点检测处理确定气动噪声的开始与结束时刻、落地声的开始与结束时刻。本文采用短时能量、短时幅度,以及短时过零率技术实现端点检测的功能。如果用xw(n)表示原始信号x(n)经过加窗处理后的信号,窗函数的长度为N,则短时能量En可由(5)式进行表示;定义一个平均幅度函数Mn来衡量声信号幅度的变化,则短时幅度可由(6)式进行计算;对于离散信号,相邻两个样点的正负号异号时称之为“过零”,此时信号的时间波形穿过了零电平的横轴,因此短时过零率Zn可以由(7)式~(9)式进行定义。
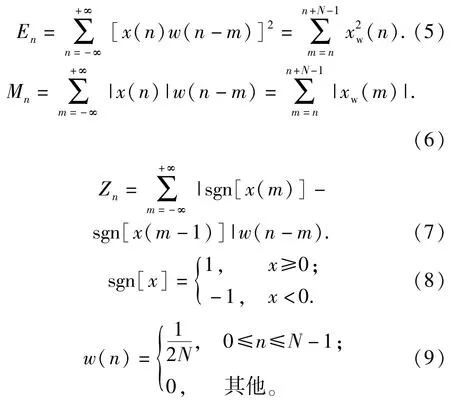
由于距离越远采集到的有效气动噪声及落地声的信号越弱,因此在实际应用中,对气动噪声及落地声开始点与结束点的检测最好将上述3类方法同时使用,以避免漏检的情况。在判断信号片段是否为气动噪声及落地声时,除了需要采用上述3类方法根据经验阈值进行信号起点与终点的判断与分割,还需要根据气动噪声的持续时间或气动噪声与落地声之间的时间间隔等的先验信息来进行端点检测正确性的判断。
3.3 声信号关键特征提取技术
本文采用小波包[12]滤波后的能量特征作为气动噪声与落地声的声学信号关键特征。小波包能够同时对信号的低频和高频信息进行分析,因此较为适合处理本文气动噪声与落地声的信号。相关特征计算的具体步骤包括:
1)首先对振动能量信号进行3层小波包分解,从而得到底3层从低频到高频8个子频带的小波分解系数.


式中:xjk(j=0,1,…,7;k=0,1,…,n)为重构信号Sj3离散点的幅值。
4)构造特征向量,与背景声学信号相比,气动噪声与落地声的声信号较强,因此可以以能量为元素构造一个特征向量进行该种信号的描述。特征向量T构造如下:

3.4 UXO识别
进行UXO识别时,一种容易想到的方法是采用分类器技术[13],根据采集到的特征数据进行分类器的训练与识别应用。然而,对于UXO的识别问题,由于其出现的情形较少,目前收集到的数据非常有限,因此采用已有的数据无法进行分类器的训练。本文提出采用最小欧拉距离度量的方式进行UXO音频信号的识别。如(13)式中给出了一种高维特征距离度量的计算方法。在进行最小距离的计算时,首先提取(12)式中多个小波包分解的能量特征向量;其次再分别计算当前信号小波包分解能量特征与已获得的标准UXO气动噪声与落地声信号小波包能量特征之间的距离,如果该距离小于某一阈值,则认为当前信号为UXO的终点弹道气动噪声及落地声信号。标准气动噪声与落地声信号小波包能量特征是根据人工经验在对实际数据分析的基础上获得的结论。

式中:xi、yi(i=1,2,…,K)分别为UXO及待检测音频信号的特征向量,K为特征向量的个数。
4 试验结果及讨论
为了验证本文所提方法的正确性,采用某型迫击炮弹单发实弹射击过程中出现的UXO数据进行相关算法的验证。UXO声学信号的采集采用录音装置按照前文所提的布站方式在靶场弹着区内进行安装与调试。UXO音频信号识别算法的仿真采用c及Matlab语言在主频为2.4 GHz、内存为3 GB的计算机上进行计算。
4.1 声学信号识别方法评估
如图3中所示,为某型弹丸下落及落地声的波形及频谱图。这段声音是用声传感器在距离弹丸落点位置100 m左右的地方捕获得到的。从图中可清楚地看出,在2.1 s左右时,弹丸砸入地面时产生了略高于背景及呼啸声的落地声。落地声波形清晰,强度高,但持续时间很短。在经过基本的频谱分析后可以得出这段声音的主要频率大多约集中在80 Hz以下,约在20~80 Hz之间。最终,在进行原始声学信号的降噪处理时,经过大量试验,在保证不失真的保存原始信号细节特征的前提下,可以选择80 Hz的低通FFT滤波器滤除可能出现的鸟叫声与蝉叫声等。
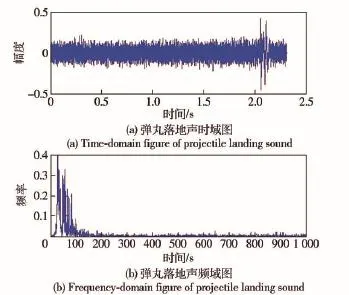
图3 原始落地声的频率特征分析Fig.3 Frequency characteristic analysis of the original landing sound
如图4中所示,为原始落地声信号增强处理结果。首先,可以选取适合的拉普拉斯小波特征参数进行原始信号的增强处理。拉普拉斯小波在具备“单边衰减”特性的同时,其正交性较差,这就决定了不能用基于正交分解的传统小波变化的方法来应用拉普拉斯小波。因而,一般常用的是使用不同的拉普拉斯小波特征波形基在时域中与信号作相关运算。其次,在完成小波滤波增强处理后,可按(4)式进行计算,以实现对落地声的增强处理。
在完成基本信号的降噪与增强处理后,需要将终点弹道的气动噪声和落地声的信号片段分割出来,以便后续进行信号的特征计算。图5中给出了原始的降噪增强滤波后的信号及其相关处理结果。图5(a)为原始降噪增强后的信号;图5(b)为端点检测后的结果;图5(c)为小波包3级分解处理后的结果。由上述结果不难看出,本文所提方法能够较好地将终点弹道的气动噪声及落地声进行检测与分割。通过大量试验比较,本文选择基函数为DB4的小波包分析方法进行音频信号的分析。最终,通过进行小波包分解计算各个子带的能量,并将其作为信号的特征。最终,在判别是否发生UXO的情况时,需要按照(13)式计算标准终点弹道气动噪声及落地声与当前声学信号的欧拉距离,如果距离小于响应的阈值,则可认为当前信号为UXO所产生的信号。经过一定量的试验,可以认为本文所提方法的正确识别率在90%以上。
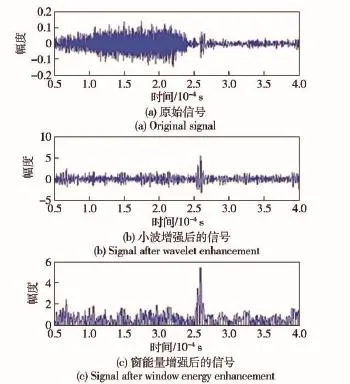
图4 原始落地声的增强处理结果Fig.4 Enhanced results of the original landing sound
4.2 具体应用
为了进一步说明本文所设计方法的正确性与有效性,给出了一个实际应用的案例。假设某型弹丸的射击试验中其终点弹道产生的声学指标的大小与距离基本能够满足确定的关系式,因此在进行UXO落点的粗定位时,首先根据声传感器测量信号小波能量的特征进行UXO的识别;再根据多个传感器声学指标的大小初步确定UXO的落地区域;最终通过经验量表或相关公式进行落点粗定位的计算。如假设弹丸为圆柱形,则对于半径为a的圆柱面声源[14],距离中心为r的一点的声压级Lp可近似由(14)式求得。不难看出,当弹丸离声传感器距离越远,则由(14)式可见传感器采集到的声信号的声压级越小,因此依据上述原理可近似确定弹丸最终所落入的位置区域。

式中:Lw为面声源的声功率级。
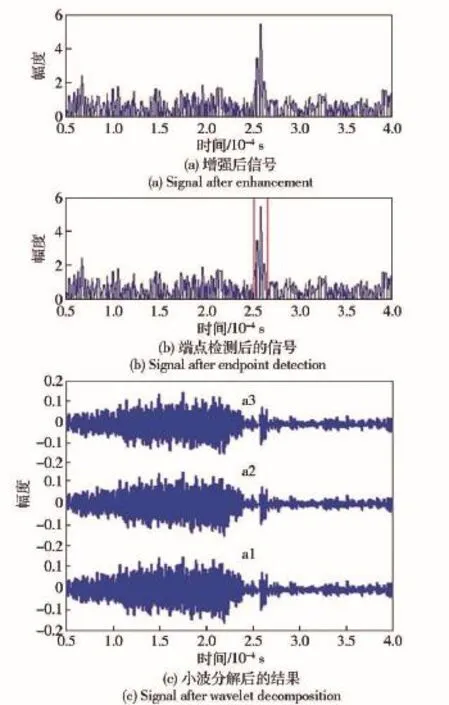
图5 声信号的端点检测与小波分解处理结果Fig.5 The endpoint detection and the wavelet decomposition of acoustic signal
在得到单个声传感器的声源指标信号后,一种进行UXO粗定位的方式是:通过大量实测的数据,建立声源指标与声源距离二者之间关系的量表。如表1所示,为某型武器射击试验中所建立的声压级与声源距离的量表示例。采用量表粗定位UXO的方法,其优点在于使用简单方便,且如果试验条件与量表制订条件基本一致时,多数对应关系较为准确。然而,采用这类方法缺点在于:该方法完全依靠经验,而经验的确定需大量实测数据的支持。在真实打靶过程中,实测数据一般较少;同时由于试验条件的变化,经验量表的结果会与真实情况有较大出入。
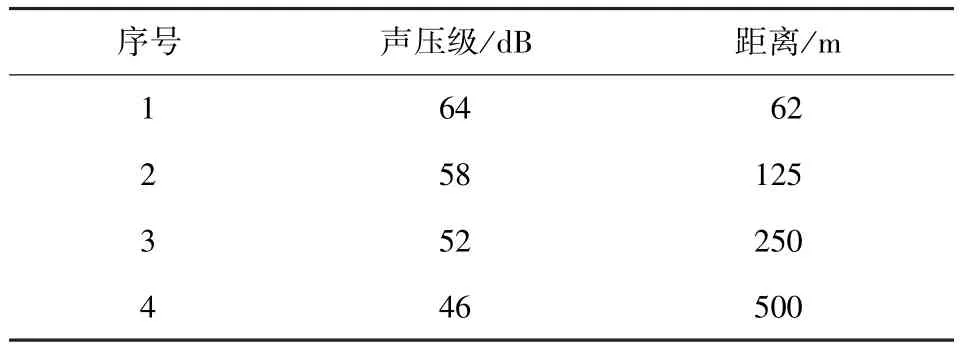
表1 声压级与声源距离经验量表Tab.1 The experience list of acoustic pressure leveland acoustic source distance
另一种粗定位的方式是采用经验公式的方式进行UXO位置的估算。参考(14)式,可假设基本的经验公式服从如(15)式的形式。因此,如果在实际打靶试验中,只有一个声传感器测量到UXO的相关数据,则仅需在该声传感器附近区域根据量表及(15)式来进行UXO的搜索;而当有两个音频传感器测量到UXO的音频信号时,由图6可知,UXO的落地坐标(x,y)可以求解。(16)式给出了一种弹着情况下落地坐标求解的解析式。图6中黑色圆圈表示音频传感器的位置,其中将坐标系原点置于一个传感器的位置之上,则另一个传感器的位置坐标(x0,y0)已知;空心圆圈表示UXO的坐标位置。而当存在多个音频传感器都测量得到UXO的落地位置时,可通过冗余计算及人工经验判断的方式进行UXO位置信息的确定。
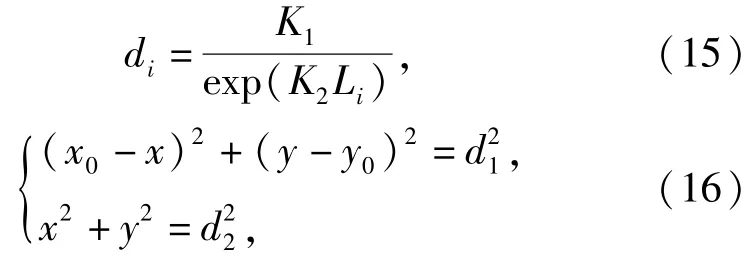
式中:di表示落地声源距声学传感器的距离;K1、K2为参数;Li表示声传感器采集到信号指标的大小。
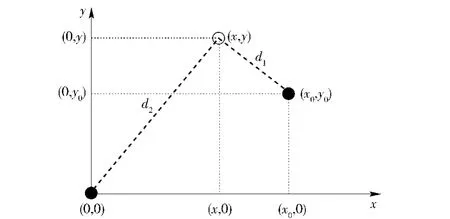
图6 UXO坐标粗定位原理图Fig.6 Schematic diagram of UXO coordinate coarse positioning
表2给出了某次实弹射击时利用本文技术得到的UXO估计坐标与实测坐标的结果比较。表中数据坐标系的建立,是以矩形弹着区的某一个直角顶点为坐标原点,相应的直角边为坐标系的两个轴进行弹着点坐标的定义。需要指出的是:本文所提的方法在根据声学信号指标大小确定UXO落入相应传感器布站区域时具有较高的识别精度,而进行具体的坐标解算时,仍然需积累大量的真实数据进行量表1与(15)式的修正。
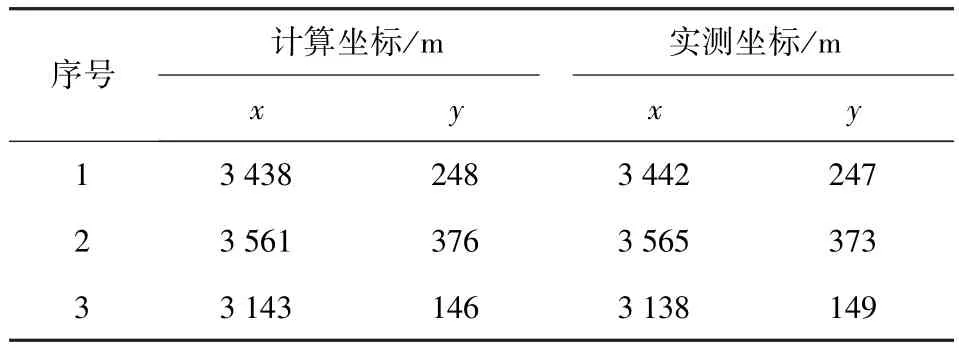
表2 UXO位置粗定位计算结果与实测结果比较Tab.2 The comparison of calculated and measured results of UXO coarse positioning
弹丸落弹区一般在方圆数百米甚至方圆上千米,在没有以上粗定位数据的情况下,一旦UXO钻入地下,需要很多人、长时间大面积搜寻,由于弹孔小,地面植被复杂,很难进行搜寻[15]。由表2结果可见,本文所提方法的粗定位结果与真实落点距离差一般小于10 m,1个人拿着手持GPS到达粗定位位置附近很快就会找到弹丸的钻地孔,大大节省了大面积搜索的人力和时间消耗。
5 结论
1)本文所提方法通过对靶场弹着区的全区域布置低成本传感器实现了靶场无死角的声学快速测量。测试系统对于每一个声学传感器分析其采集到的声学信号,采用FFT、拉普拉斯小波分析技术进行声学信号的降噪与增强;分别计算信号的短时能量、短时幅度及短时过零率进行气动噪声与落地声的起点与终点检测;采用小波包技术进行声信号的特征提取;采用基于最小距离阈值准则的方法进行UXO终点弹道气动噪声与落地声的识别。通过靶场试验,证实了本文所提方法的正确性与有效性。与光学测量、雷达测量[16]技术相比,本文所提方法具有系统成本低的优点。
2)本文所提方法的缺点在于:一方面,目前上述方法仅适用于单发弹丸的试验情况,尚不具备区分射频较高的连发弹丸气动噪声及落地声的功能;另一方面,本文的方法定位精度有限,且暂未考虑风速、风向等因素的影响,常常不能直接作为弹着点坐标数据。
3)对于本文所提出的终点弹道气动噪声及落地声分析的UXO识别问题,随着各类UXO气动噪声与落地声信号的收集与积累,可采用诸如支持向量机分类器的方式替代现有的基于欧拉最小距离的UXO识别计算方法,为进一步提高全系统的智能化处理能力提供支持。在未来,随着信息化技术的发展,“数字靶场”的建设将成为可能,通过结合弹着时的地震波信号、图像信号,可进一步提高对UXO识别及位置坐标测量的精度。
(
)
[1]曲赞,李永涛.探测未爆炸弹的地球物理技术综述[J].地质科技情报,2006,25(3):101-104. QU Zan,LI Yong-tao.Overview on detection for unexploded ordnance(UXO)with geophysical techniques[J].Geological Science and Technology Information,2006,25(3):101-104.(in Chinese)
[2]Sanchez V,Li Y,Nabighian M N,et al.Numerical modeling of higher order magnetic moments in UXO discrimination[J].IEEE Transactions on Geoscience and Remote Sensing,2008,46(9):2568-2583.
[3]van Waard R,van der Baan S,van Dongen K W A.Experimental data of a directional borehole radar system for UXO detection[C]∥International Conference on Ground Penetrating Radar.Delft,the Netherlands:IEEE,2004:225-228.
[4]李小康,杨磊,刘磊.未爆弹药问题及其地球物理解决方案综述[J].中国矿业,2010,19(增刊):187-191. LI Xiao-kang,YANG Lei,LIU Lei.Overview on unexploded ordnance problem and a solution:the geophysical scheme[J].China Mining Magazine,2010,19(S):187-191.(in Chinese)
[5]喻忠鸿,王传雷,吴文贤,等.磁法探测炸弹有效深度的物理模拟试验及分析[J].工程地球物理学报,2007,4(2):118-122. YU Zhong-hong,WANG Chuan-lei,WU Wen-xian,et al.Physical simulation experiment and analysis to the effective depth for magnetic survey detecting unexploded ordnance[J].Chinese Journal of Engineering Geophysics,2007,4(2):118-122.(in Chinese)
[6]王学志,涂英,吴克桐,等.基于匹配场原理的矢量阵三维声源定位研究[J].兵工学报,2013,33(8):927-933. WANG Xue-zhi,TU Ying,WU Ke-tong,et al.Vector array for 3D source location based on matched field principle[J].Acta Armamentarii,2013,33(8):927-933.(in Chinese)
[7]董明荣,许学忠,张彤,等.空中炸点三基阵声学定位技术研究[J].兵工学报,2010,31(3):343-349. DONG Ming-rong,XU Xue-zhong,ZHANG Tong,et al.Research on three-array acoustic localization technology for the aerial blast points[J].Acta Armamentarii,2010,31(3):343-349.(in Chinese)
[8]刘亚雷,顾晓辉.三维运动声阵列对双点声源角跟踪指向性能研究[J].兵工学报,2012,33(5):526-533. LIU Ya-lei,GU Xiao-hui.Research on the angle tracking pointing performance of 3D dynamic acoustic array based on dual acoustic sources[J].Acta Armamentarii,2012,33(5):526-533.(in Chinese)
[9]Li X F,Liu H.Sound source localization for HRI using FOC-based time difference feature and spatial grid matching[J].IEEE Transactions on Cybernetics,2013,43(4):1199-1212.
[10]Jiang Q,Li T,Yao Y,et al.A study of EMD modal identification based on Laplace wavelet matching[C]//International Conference on Intelligent System Design and Engineering Application.Sanya,Hainan,China:IEEE,2012:101-104.
[11]Wu B F,Wang K C.Robust endpoint detection algorithm based on the adaptive band-partitioning spectral entropy in adverse environments[J].IEEE Transactions on Speech and Audio Processing,2005,13(5):762-775.
[12]Tohidypour H R,Seyyedsalehi S A,Behbood H.Comparison between wavelet packet transform,Bark wavelet&MFCC for robust speech recognition tasks[C]//International Conference on Industrial Mechatronics and Automation,Wuhan,Hubei,China:IEEE,2010:329-332.
[13]Bijamov A,Fernandez J P,Barrowes B E,et al.Camp Butner live-site UXO classification using hierarchical clustering and Gaussian mixture modeling[J].IEEE Transactions on Geoscience and Remote Sensing,2014,52(8):5218-5229.
[14]杜功焕,朱哲民,龚秀芬.声学基础[M].南京:南京大学出版社,2001. DU Gong-huan,ZHU Zhe-min,GONG Xiu-fen.Basic acoustics[M].Nanjing:Nanjing University Press,2001.(in Chinese)
[15]Zhang Q,Al-Nuaimy W,Huang Y.Detection of deeply buried UXO using CPT magnetometers[J].IEEE Transactions on Geoscience and Remote Sensing,2007,45(2):410-417.
[16]苏新主,姬红兵,高新波.一种基于数学形态学的红外弱小目标检测方法[J].红外与激光工程,2004,33(3):307-310. SU Xin-zhu,JI Hong-bing,GAO Xin-bo.Detection method for dim small IR targets based on mathematical morphology[J].Infrared and Laser Engineering,2004,33(3):307-310.(in Chinese)
UXO Detection Based on Terminal Ballistics Acoustic Signal Analysis of Aerodynamic Noise and Landing Sound
ZHANG Ya-hui1,WANG Yu-long1,LIU Hao-ting2,LI Hong-kai1,ZHU Wang-fei1,YU Qin-lan1
(1.Huayin Ordnance Test Center,Huayin 714200,Shaanxi,China;2.Beijing Institute of Aerospace Control Instrument,Beijing 100094,China)
For the location problem of unexploded ordnance(UXO)in the processes of conventional weapon test,military training and exercises,a low cost UXO detection method of the terminal ballistics is presented.According to the size of the impact area,many low cost acoustic sensors are installed in shooting range.The measuring range of these sensors covers the whole impact area.As for the signals of aerodynamic noise and the landing sound,which are captured by each acoustic sensor,the computation is implemented to used FFT and Laplace wavelet to denoise and enhance the original acoustic signal;use the short time energy,short time amplitude,and short time zero-crossing rate to detect the endpoint of these signals above;use the wavelet packet to collect the features of the enhanced signal;and use the minimized distance-based threshold criterion to identify the aerodynamic noise and the landing sound. The test results of UXO location in the shooting range show that the proposed technique can be used for UXO location and the location accuracy can reach 10 m.
ordnance science and technology;unexploded ordnance;endpoint detection;wavelet analysis;feature identification;acoustic location
TP29
A
1000-1093(2015)08-1525-08
10.3969/j.issn.1000-1093.2015.08.021
2014-11-06
总装备部重点预先研究项目(2012SY32B004)
张亚辉(1979—),男,工程师。E-mail:yahui.32@qq.com
猜你喜欢
天然气与石油(2022年4期)2022-09-21
小学生必读(中年级版)(2021年12期)2021-12-02
北京航空航天大学学报(2021年6期)2021-07-20
家庭影院技术(2020年6期)2020-07-27
兵器装备工程学报(2020年3期)2020-04-22
家庭影院技术(2019年1期)2019-01-21
家庭影院技术(2018年11期)2019-01-21
家庭影院技术(2018年10期)2018-11-02
劳动保护(2018年5期)2018-06-05
弹箭与制导学报(2018年5期)2018-02-21
