多轮刹车均衡控制技术研究及仿真验证
2015-11-23 06:34崔福霞李鹏飞
大众科技 2015年9期
崔福霞李鹏飞
(1.西安航空职业技术学院,陕西 西安 710089;2.西安工程大学,陕西 西安 710048)
多轮刹车均衡控制技术研究及仿真验证
崔福霞1,2李鹏飞2
(1.西安航空职业技术学院,陕西 西安 710089;2.西安工程大学,陕西 西安 710048)
对多轮刹车均衡控制的原理进行了分析,并对控制算法进行了研究,设计了平衡调节器,建立了基于均衡控制技术的多轮系刹车系统仿真模型,仿真结果表明,多轮系均衡控制策略可以使飞机在滑行刹车时减小侧滑、减小飞机地面刹车时的偏航距离。该技术可使刹车时各机轮刹车载荷均衡,对于减少轮胎偏摩,避免刹车时的啸叫和共振具有重要意义。
多轮系;刹车;均衡控制;仿真验证
1 引言
飞机机轮刹车控制系统是飞机起飞降落系统重要的组成部分,其主要任务是不断检测刹车机轮的滑动状态,根据检测结果及时调节输入压力,达到有效刹车又不致于机轮深度打滑,从而缩短飞机的着陆滑跑距离[1]。
多轮系飞机刹车系统是一个比单轮刹车系统复杂的非线性系统,刹车过程中存在着更多的随机干扰,结构参数具有时变性和时不变性,用传统的控制方法难以达到预期刹车效果[2]。在飞机机轮刹车过程中,机场侧风、不均匀气流及跑道等情况会使各个机轮承受的载荷不一致,从而带来机轮运动状态的不一致,对刹车通道的单独控制已不能满足要求,必须对多个机轮间进行均衡控制。
2 多轮系均衡控制技术研究
2.1多轮系机轮布局
对于大型飞机,为了承担更大的载荷,起落架的布局形式多采用多轮或多轮多支柱等形式,如图1所示为典型的四轮小车式主起落架机轮布局。
在实际刹车过程中,除了机场侧风、不均匀气流及跑道等情况可能使左右主起落架上的机轮运动状态不一致。另外,由于在飞机地面运动过程中车架的俯仰运动,导致车架前后机轮的载荷不同,从而使前后机轮的打滑程度不同。因此,必须采用多通道控制方式,对左右两侧和前后两向的机轮刹车分别控制。
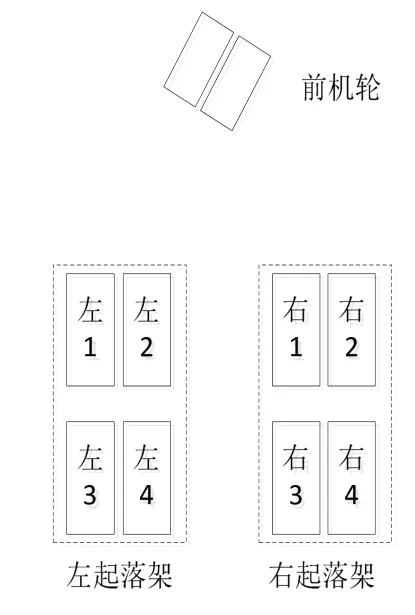
图1 四轮小车式主起落架机轮布局
2.2多通道控制的原理
由于同一个车架左右两个机轮的运动状态差别不大,对此两个机轮可采用相同的控制通道,根据上述的结构布局,控制方式可简化为两对侧间双通道控制和两对前后向双通道控制,其结构原理图如图2所示。

图2 多通道机轮刹车控制原理图
在采用多通道控制过程中,被控制的左右机轮速度差不能太大,如果太大,其运动将成S型,偏离正常航线,威胁飞机安全。这里将采用交叉控制和自锁控制将结合的方法进行多通道的控制,控制思想是:将左右两侧前向或后向两个机轮编为一个机轮组;对每一个机轮组,取其中速度较小者的轮速为本机轮组的轮速;每一个机轮组采用单独的通道进行防滑控制,当各个机轮组之间的轮速相差不大时,交叉保护和自锁保护不起作用;当前后机轮组轮速相差过大时,自锁保护开始工作,当左右机轮组轮速相差过大时,交叉保护起作用。
2.3均衡调节算法
由于左右机轮和地面结合面的差异,左右缓冲器特性不一致,以及非对称特性下的刹车等的影响,飞机左右机轮的运动会出现不平衡现象,即左右机轮的前进方向不是始终和飞机中轴线保持平行。这些情况对飞机防滑刹车系统的影响是很大的,若发生这种情况,不把两边机轮的运动情况调节平衡就会使飞机偏离跑道,同时这种调节还必须是及时的。另外,在控制盒中增加了一个左右机轮平衡调节器。
设E为左右两轮转速差设定的门限值,定义如下函数:
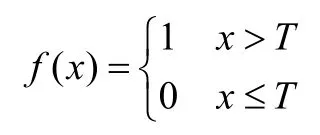
设lV、rV为左主机轮与右主机轮的轮速,lu、ru分别为当前两主机轮的防滑刹车输出信号;lY、rY为补偿之后的防滑刹车输出信号。则该两个通道机轮的平衡刹车控制律为:


由此,带有平衡调节补偿功能的双通道防滑刹车控制结构如图3所示。
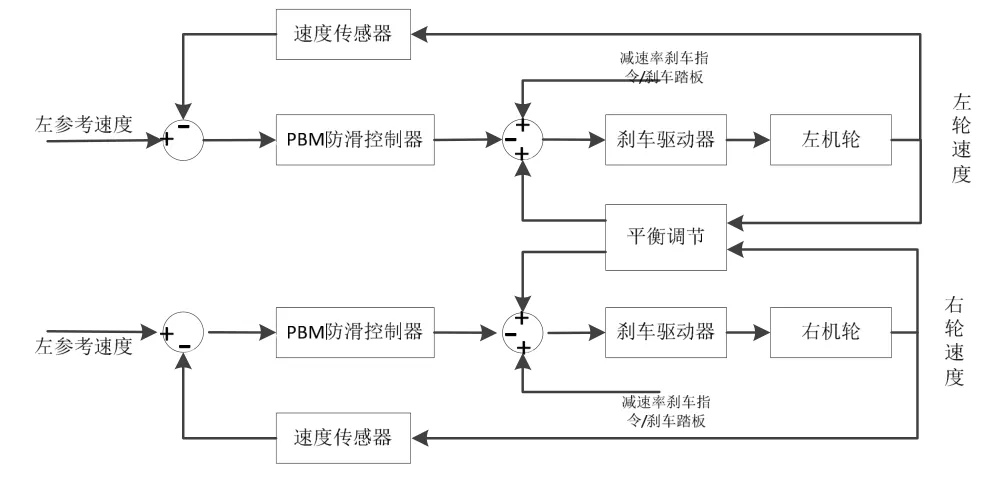
图3 带有平衡调节给你的防滑刹车控制结构
由上述的分析可知,当机轮的轮速等效电压值小于某个值时,给速度大的机轮控制器适当的减小控制电流,增加刹车压力,减小机轮速度;当机轮速度介于两个门槛值之间时,说明机轮已开始打滑,此时就要适当增大输出电流,减少刹车压力,机轮速度增大。
3 仿真验证
采用Matlab/simulink对飞机动力学、机轮、防滑刹车系统等进行建模,仿真模型的结构如图4所示。
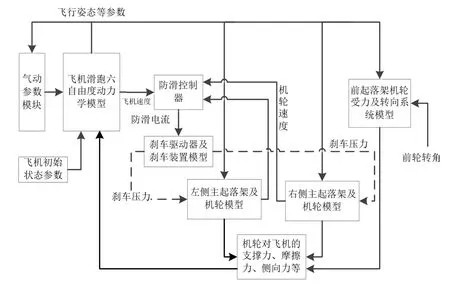
图4 仿真原理框图
当左右机轮状况不一致,无多轮系防滑控制策略,减速率为-2m/s时的仿真结果如图5所示。
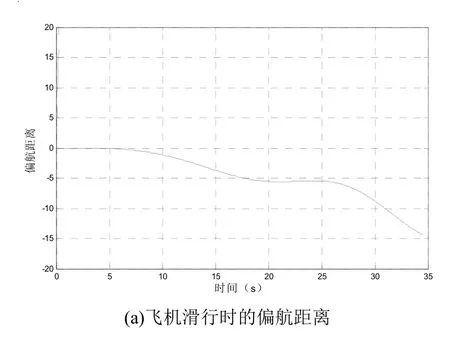
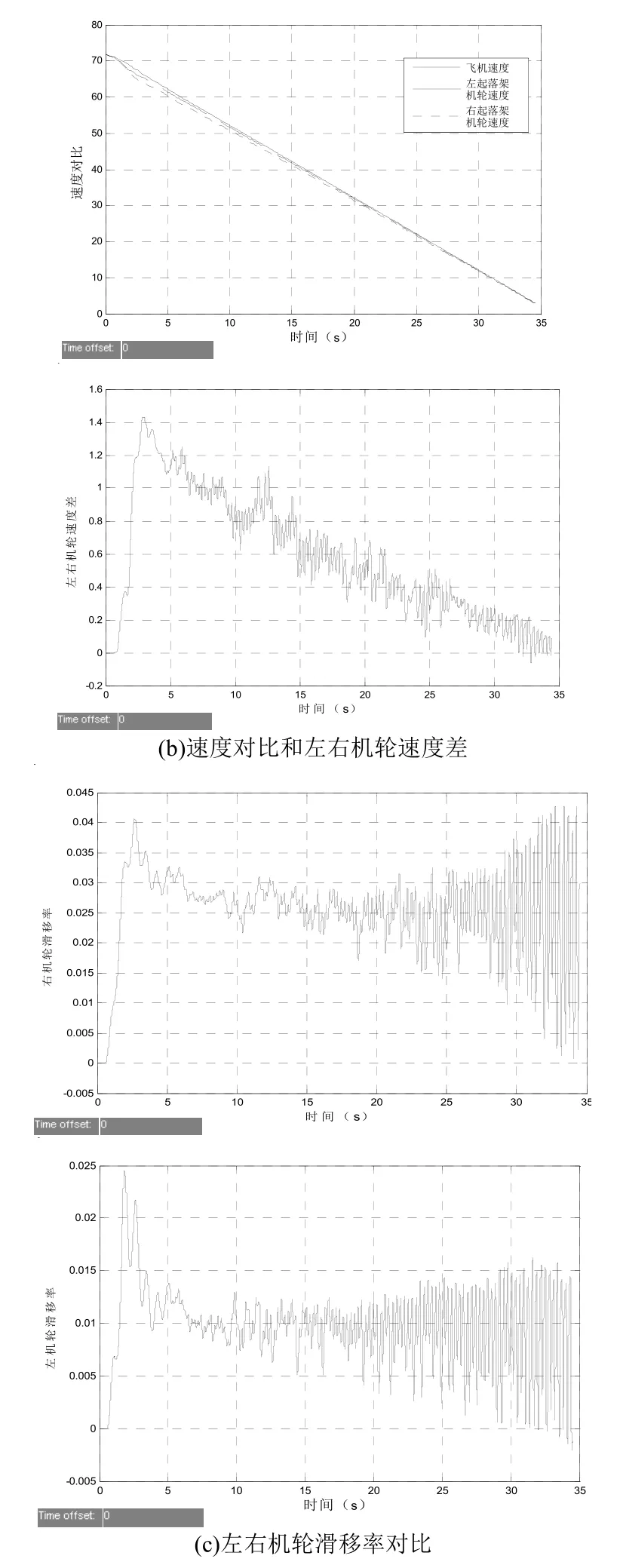
图5 左右机轮载荷不一致时无多轮系控制律时的仿真结果
当有多轮系均衡控制策略,并且左右机轮载荷状态不一致,减速率为-2m/s时的仿真结果如图6所示。

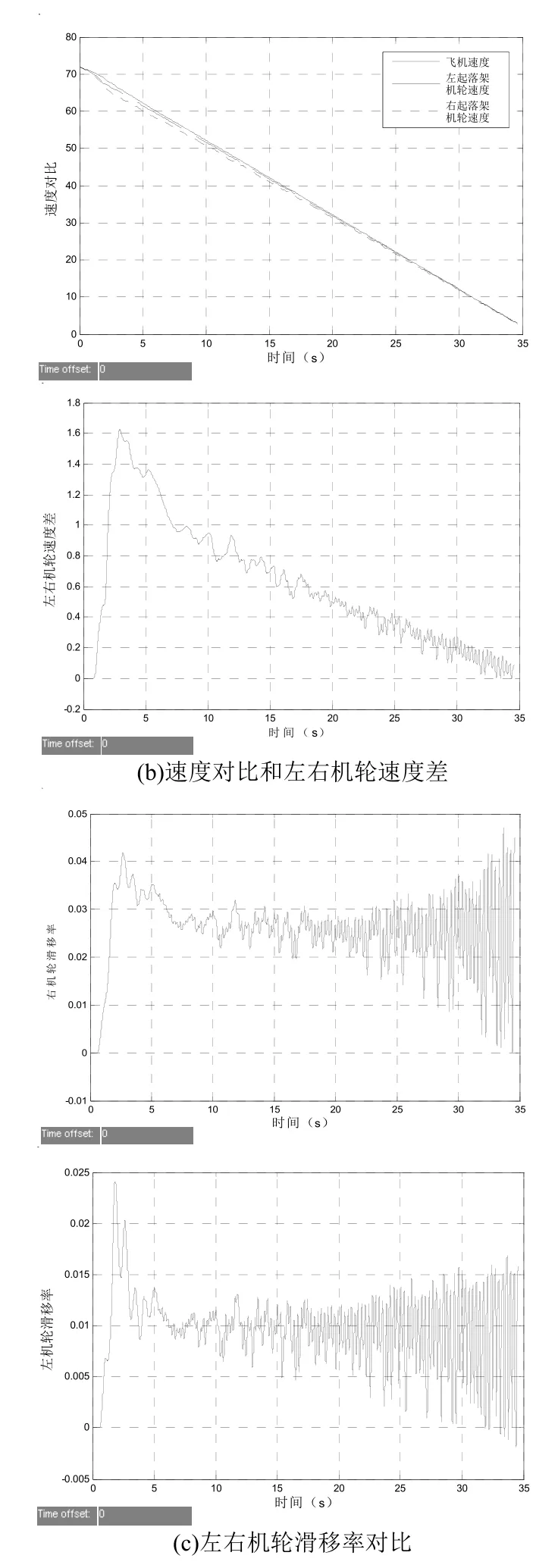
图6 左右机轮状况不一致时有多轮系控制律时的仿真结果
从图5和图6可以看出,由于给定减速率都是-2m/s,在防滑系统的控制下,飞机在其航向上的滑行距离基本没有差别;从这两个图的飞机偏航距离对比可以看出,在有多轮系均衡控制策略时,飞机偏航距离为5m左右;在系统无多轮均衡控制策略时,偏航距离增加到了15m左右,说明均衡控制策略起到了防止因刹车引起偏航的作用。
从飞机速度和速度差的对比图可以看出,在有多轮系均衡控制策略,飞机左右两侧飞机速度变化率明显比没有均衡控制时平缓很多,在飞机速度差的控制方面,多轮系均衡控制策略也有很大的作用。
从飞机左右机轮滑移率的对比图可以发现,在系统有多轮系均衡控制策略时,飞机滑移率的变化率变的平缓了许多。
最后由飞机侧向力的对比可以看出,多轮系均衡控制策略对飞机左右起落架所受的侧向力也得到了一定的改善。
通过上述的分析可知,在飞机左右跑道状况不一致时,多轮系均衡控制策略可以使飞机在滑行刹车时减小侧滑、减小偏航距离比较小,此时需要配合前轮转弯系统来减小偏航距离。
4 结论
本文研究了多轮系机轮刹车均衡控制技术,对多通道见的均衡调节算法进行了设计,建立了基于多轮系均衡控制技术的飞机刹车系统仿真模型,开展了相关仿真分析工作,仿真分析结果表明:多轮系均衡控制策略可以使飞机在滑行刹车时减小侧滑、减小飞机地面刹车时的偏航距离。同时,该技术可使刹车时各机轮刹车载荷均衡,对于减少轮胎偏摩,避免刹车时的啸叫和共振具有重要意义。
[1] 齐洁.多轮系飞机刹车系统控制与仿真研究[D].西安:西北工业大学,2007.
Research and simulation of multi wheel brake control technology
Of wheel brake balance control principle are analyzed, and the research of control algorithm and the balance controller is designed and established based on balance control technology of multi gear brake system simulation model, simulation results show that, multi wheel balancing control strategy allows an aircraft to glide brake reduces sideslip, reduce the ground plane brake yaw distance. This technique can make the braking the wheel brake load balance, to reduce tire friction and avoid brake squeal and resonance is of great significance.
Multi gear; brake; balance control; simulation
V22
A
1008-1151(2015)09-0074-03
2015-08-11
崔福霞(1981-),女,河南周口人,西安航空职业技术学院实习实训中心讲师,研究方向为数控加工技术及仿真。
猜你喜欢
低温与特气(2022年2期)2022-11-26
汽车安全与节能学报(2022年2期)2022-07-17
汽车实用技术(2022年10期)2022-06-09
哈尔滨轴承(2021年4期)2021-03-08
汽车实用技术(2020年24期)2021-01-05
铝加工(2019年5期)2019-02-08
中国自行车(2018年9期)2018-10-13
中国自行车(2018年7期)2018-08-14
中国自行车(2018年7期)2018-08-14
中国自行车(2017年1期)2017-04-16