
基于MSP430系列微控制器的赤道式天文望远镜伺服控制器的设计
2015-11-26 09:06创新者李志凌古力艾尼瓦尔贾世甄
中国科技信息 2015年22期
创新者:李志凌 古力·艾尼瓦尔 贾世甄 尹 航
基于MSP430系列微控制器的赤道式天文望远镜伺服控制器的设计
创新者:李志凌 古力·艾尼瓦尔 贾世甄 尹 航
本文介绍了一种基于MSP430单片机的赤道式望远镜伺服控制系统的设计方案,其中包括以下三个方面,赤道式望远镜伺服控制系统的硬件设计总体方案;赤道式望远镜伺服控制系统的软件总体架构;基于单片机C语言的自适应寻星的控制算法。经测试,应用了本课题成果的试验用赤道式天文望远镜减小了对上位机的依赖,实现了由程序控制的自主寻星功能,大大提高了系统性能。
课题通过对市场调研发现,在当前国内天文望远镜市场上,发现台式微型计算机已经成为当前大中型天文望远镜伺服计算机的主流。但是台式计算机应用为天文望远镜的伺服计算机,也会带来包括增加产品成本,手动操作功能数量少等缺点。课题就嵌入式计算机MSP430F149应用于赤道式天文望远镜系统的控制展开研究,基于IAR 的C语言单片机开发平台,以MSP430F149系列微控制器为硬件架构,开发了一款新的服务于赤道式天文望远镜的新型嵌入式伺服控制系统,同时,基于单片机C 语言设计了望远镜自适应寻星的控制软件。整套系统嵌入于望远镜的智能手柄盒模块内,实现了一种具有自适应寻星的功能智能手柄。
系统硬件架构
系统硬件模块中的主控制器是系统数据处理的运算单元,因此,其在选型过程中需要采用低功耗,运行效率高的特点,因此课题选用TI公司出品MSP系列十六位微控制器为核心数据处理单元,其具有极为强大的数据处理能力,较低的功耗,丰富的片上外设资源,TTAG仿真技术调试等优点,它的高级语言编程能力以及方便的集成开发环境,可以极大的提高软件的开发效率。同时,该系列的单片机为双串口型MCU,可以实现与上位机及智能手柄同时通信的功能,也可以根据实际情况,与对应模块行单独通信。
采用XC95108芯片作为编码器数据的采集传感器;采用MC146818时钟芯片产生恒星时,为系统提供精确时间。同时采用市场上比较容易获得的8279芯片与成本较为廉价的12864液晶屏为人机接口的显示模块。
系统的硬件架构如图1所示。
系统控制软件的需求分析与整体架构
软件系统由四个模块组成:上位模块,智能手柄模块,下位机模块以及伺服驱动模块。其中上位机模块与智能手柄模块分别与下位机主控MSP430F149进行通信。伺服驱动模块与下位机PWM接口输出相连,由MSP430F149通过PWM的方式直接驱动伺服电机。
作为软件系统的核心部分,下位机软件的编程直接影响到了系统的性能。以下主要介绍下位机软件的设计流程及算法思路。
需求分析

图1 系统的硬件架构

图2 控制系统下位机软件架构
系统控制软件的作用为实现系统的自主寻功能。其主要步骤为:第一,对望远镜进行位置校准,操作方法为选取中天空中的某一颗已知星,操作智能手柄进行手动操作,将望远镜视场中心的十字线对准目标源;第二,进行查表作业,将这颗星的坐标位置通过智能手柄输入系统,作为定标,代替观测系统初始时刻的位置;第三,将星空中一颗基本星源设置为基本点,作为标定对象,根据现有的时角和赤纬参数确定星空中的其它任何一颗未知的观测目标。在系统软件设计的过程中,课题加入了对于系统进行掉电保护的功能模块,该模块使系统的操作步骤得到了极大的简化,因此,在望远镜使用的过程中,在设备安装完毕后,只需要对系统进行一次标定作业,在后续的观测任务中,当每次寻星任务结束以后,结束时刻设备的实时位置参数都会自动保存在系统内部,极大的方便了用户的操作当望远镜系统进行自主寻星作业时,操作人员通过智能手柄向系统输入待观测星源的坐标参数,即(α,δ)参数,观测系统会根据设备在当前时刻位置参数以及待观测星源的位置参数选择合适的路径,进行巡天观测,并驱动电机,实现系统的精确指向,使系统指向目标星源进行巡天观测,最终使望远镜的中心视场对准目标星体。进行寻星作业结束以后,控制系统会调制设备状态,使其自动进入跟踪星源的观测作业状态。观测设备的指向参数与待观测星源的位置参数是通过观测设备所处位置的的恒星时参数进行结合的,因此,在每次寻星观测之前,都要对观测地点的恒星时参数进行校正,校正作业由系统软件的自适应校正与手动校正配合进行,并在交互模块上实时显示当前的控制状态。
对于公式t+a=s,其中t参数是待观测星源的时角位置;a参数是待观测星源的赤经值;s参数为观测设备所处地点的恒星时参数。
在进行跟踪作业时,系统为克服地球自转对自身的影响,驱动电机工作,使设备以每时秒15个角秒的角速度,沿着观测时地球自转的反方向进行匀速运动,以补偿系统时角的变化。为了补偿地球反向运动对时角参数的影响,在调整赤经参数时,系统的操作状态是采集观测设备所处位置的地方恒星时,同时计算出待观测星源的时角参数,通过对两个参数的结合运算,调整观测设备的动态时角参数与待观测星源的时角参数相等;在调整赤纬参数时,课题考虑到恒星的赤纬参数是恒定不变的,因此,在实际操作中,我们需要将系统的动态赤纬参数的调整量不断考进待观测目标星源的赤纬值。

图3 控制系统下位机软件流程图
自动寻星算法的实现
标定子程序流程如图4所示。
在系统的在系统的整体设计中,自主寻星功能模块,是整个系统实现自主寻星功能的核心算法,因此,该模块的设计质量,直接影响到系统的整体性能。它的实现步骤主要由三部分组成,第一,根据人机交互模块输入的所要观测目标星源的赤经值参数,确定观测设备所处位置的地方恒星时,该参数记为s;第二,将所采集到的观测设备所处位置的地方恒星时参数s换算成待观测星源的时角值参数,记为t,第三,根据待观测星源的时角值参数,在待观测星源赤经时角所处的天区的差异,选择出一条最佳的寻星路径。
选择最佳寻星路径的实现是自动寻星算法的核心,其具体实现方式可以分为以下三种工况:第一,以望远镜的中柱为轴线坐标,如果设备与待观测星源的时角正好处在同一天区位置。则先驱动赤纬轴电机工作,实现纬度定位,再驱动赤经轴电机工作,实现纬度定位,最终使待观测星源进入中心观测区,然后开始跟踪作业。第二,以望远镜的中柱为轴线坐标,如果设备与待观测星源的时角没有处在同一天区位置。则先驱动赤纬轴电机工作,让赤纬参数指向北极位置。再驱动赤经轴,再驱动赤经轴电机工作,实现纬度定位,最终使待观测星源进入中心观测区,然后开始跟踪作业。第三,对部分数据进行处理,鉴于设备所处的观测位置的参数信息是由自增量式圆光栅编码器提供的,而赤纬参数的参数范围为(一90,90)区间内部,因此,自主寻星模块在算法设计上还需要进一步的数据处理。处理后的数据就是典型的目标追踪问题。以赤经为例进行寻星的具体流程图如图5所示。

图4 时间标定程序模块流程图

图5 自动寻星算法流程图
关键功能的实现
键盘输入及显示部分
人机交互接口的设计是单片机应用系统中的重要组成部分。因此,一个高效、便捷的人机交互接口,成为本课题中的一个重要组成部分。根据天文观测中的实际需求,键盘输入驱动芯片选用8279芯片。8279芯片是一种通用的可编程序的键盘输入、信息显示接口芯片,可以将键盘信息输入到单片机中。编程思路如下:
(1)定义各键值,初始化各键的状态值;
(2)设计相应的键盘处理函数,根据键值执行相应的功能函数;
(3)各个功能键的判断语句使用switch语句,根据刷新后的当前状态执行相应的功能函数;
(4)运用状态机思维的编程思想,使用状态刷新函数,不断更新当前的状态值
部分代码如下:

基于MC146818的时钟模块的设计
MC146818时钟芯片是摩托罗拉公司出品的可通过编程控制的一种时钟输出芯片。课题将146818时钟芯片作为采集设备所处位置的恒星时的基准模块,其中技术难点为MC146818芯片的初始化,读时间操作,写时间操作三个功能函数。其中,在使用该芯片的过程中,需要对芯片进行读写操作,在操作之前,要首先查询芯片确定是否处在刷新数据的状态。如果正处在刷新数据的状态,必须等到刷新数据动作完成之后再对芯片进行读,写操作。
MC146818模块部分功能函数代码如下所示:


串行通信的实现
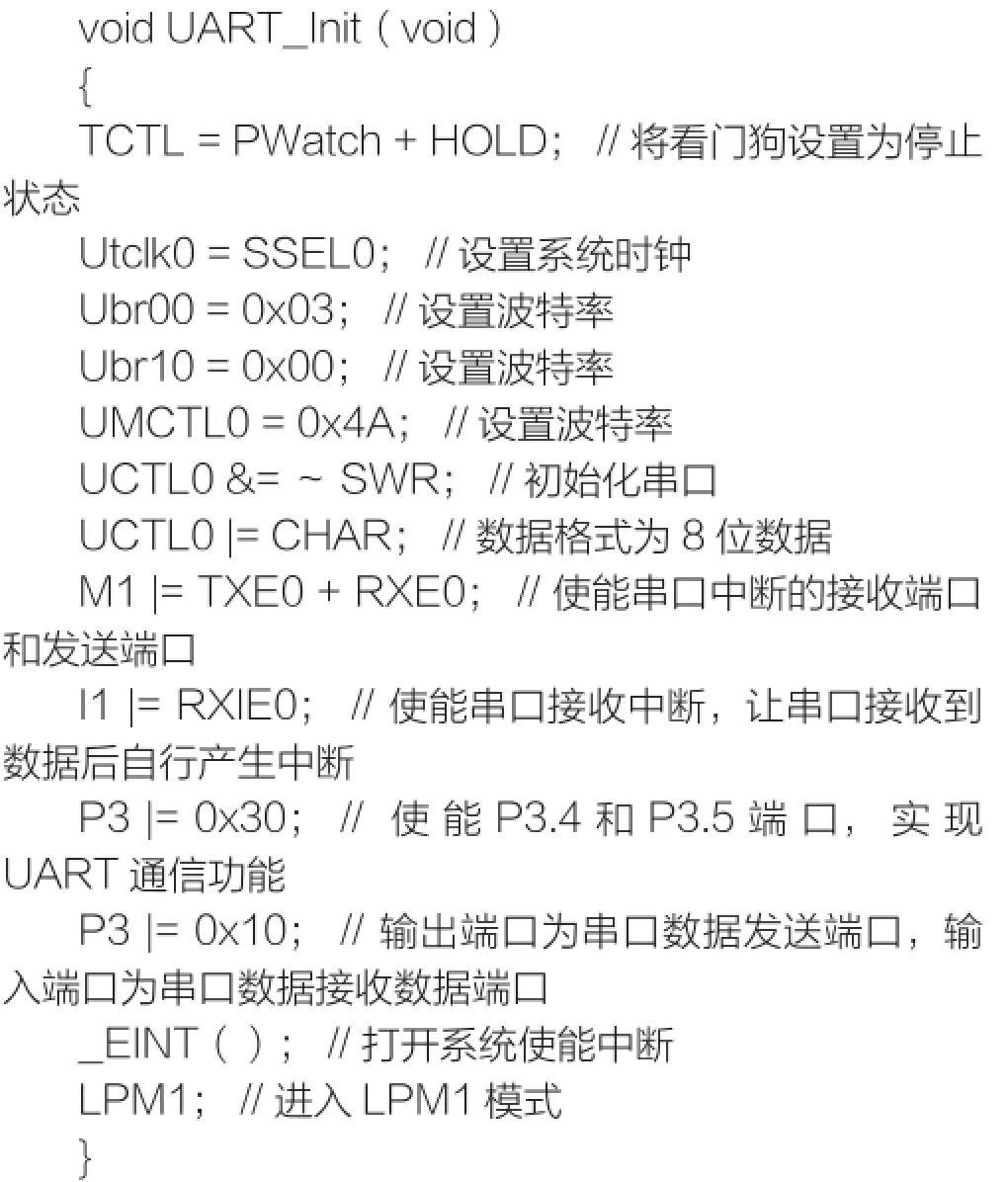
MSP430F系列十六位微控制器可以通过自带的UART0和UART1通用串口外设双串口通信,其工作模式为,接收数据状态一般采取被动方式,数据发送状态则多采用主动方式。在系统中,串口功能函数会顺序查询相应端口是否有数据请求,并根据接收到的数据,执行相关功能的子函数,同时将执行模块的的参数分别发送给手动操作器和控制计算机,等待接收控制命令。
部分代码实现如下:
结束语
采用上下位计算机控制模式,实现了望远镜的自主寻星与跟踪。为了提高系统的稳定性与可靠性,增强系统抗干扰的能力,课题采用了比较规范的通信协议。在新疆地区良好的观测环境下,持续两个星期的观测与调试,系统整体性能运行良好,系统降噪效果较为明显,寻星作业完成效果较好,精度较原有的8位微控制器实现效果有所提高,能够适用于各种巡天观测的望远镜设备。
李志凌1古力·艾尼瓦尔1贾世甄2尹 航3
1.中国人民解放军乌鲁木齐民族干部学院;
2.江南大学理学院;
3.中国科学院大学物理学院李志凌(1976.10)乌鲁木齐民族干部学院,讲师,研究方向:计算机应用技术。

10.3969/j.issn.1001-8972.2015.07.001
猜你喜欢
环球时报(2022-09-29)2022-09-29
发明与创新(2021年17期)2021-07-05
军民两用技术与产品(2021年12期)2021-03-09
中学生数理化·八年级物理人教版(2018年11期)2019-01-31
军事文摘(2018年24期)2018-12-26
中国化妆品(2017年12期)2017-06-27
摄影之友(影像视觉)(2017年12期)2017-02-08
杂文月刊(2016年11期)2017-01-10
太空探索(2016年7期)2016-07-10
太空探索(2015年8期)2015-07-18
