
一种宽带相控阵多基线干涉仪的设计方法
2015-11-28 05:08翟晓宇王建
火力与指挥控制 2015年8期
翟晓宇,王建
(中国船舶重工集团第七二四研究所,南京210015)
一种宽带相控阵多基线干涉仪的设计方法
翟晓宇,王建
(中国船舶重工集团第七二四研究所,南京210015)
将相位干涉仪测向应用到宽带相控阵雷达上,采用一种基于复相关运算的方法求解长基线的相位模糊,并针对仿真过程中该方法的局限性,提出了一种改进的解模糊方法。由于相控阵天线布局已经确定,基线长度只能使用半波长的整数倍,在此条件的约束下,为了使用尽量少的阵元,达到正确解模糊、保障测向精度的目的,针对0.7 GHz~2GHz宽带射频信号,提出了一种宽带相控阵多基线干涉仪的设计方法,通过仿真结果验证了该方法有效、可行。
宽带相控阵,多基线干涉仪,复相关运算,相位模糊,阵元设计
0 引言
相控阵雷达通过控制阵列天线中各个单元的相位,得到所需的方向图和波束指向,是一种具有多功能、多目标、远距离、高数据率、高可靠性和高自适应能力的重要雷达。相控阵雷达具有这些特点的原因在于其采用的是相控阵天线,具有波束指向、波束形状快速变化能力,易于形成多个波束,可在空间实现信号功率合成。相控阵雷达具有稳定跟踪多批运动目标的能力,为推远雷达作用距离、提高雷达测量精度和观测包括隐身目标在内的各种低可观测目标提供了技术可能[1]。
另一方面,在干涉仪测向出现的早期阶段,受制于相位测量精度的原因,干涉仪测向很难出现在实际应用中。随着科学技术的不断进步,相位测量的精度不断提高,干涉仪测向慢慢进入到实际应用阶段。现在实际工程中常用的干涉仪有多种不同的形式,如单波道相关干涉仪、双波道干涉仪、双波道“和差”干涉仪、多波道干涉仪等,它们可应用于不同的场合。
如果将干涉仪测向的方法应用于相控阵雷达上,可以利用干涉仪测向属于宽角测向,瞬时的覆盖范围广,测向速度快,并且截获目标的概率高等特点,很好地将相控阵雷达和干涉仪测向的优点结合起来。所以进行基于宽带相控阵的干涉仪测向技术的研究具有重要的军事意义和工程应用价值。
1 干涉仪测向基本原理
下面就简要介绍一下干涉仪测向的基本原理[2],如图1所示。
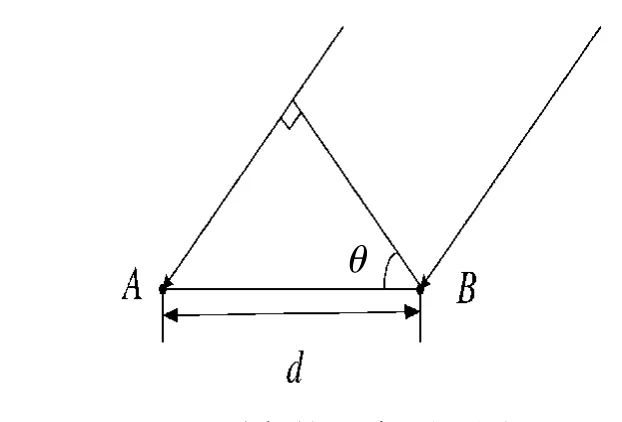
图1 测向的基本原理图
如图1所示,A、B是一条基线上的2个天线单元,基线长度为d,入射信号的波长为,与法线方向夹角为θ,信号波前到达天线阵元A、B时的相位差为。
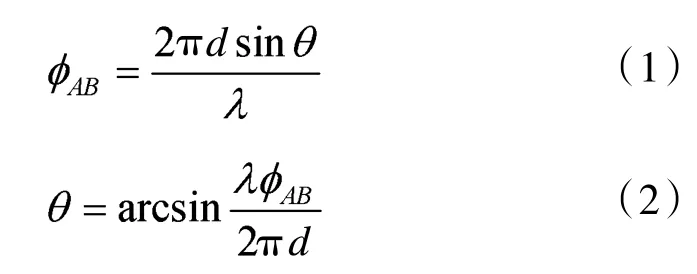
考虑单基线干涉仪的测向精度,对式(2)中的各个变量求微分,
由式(4)可以看出,当入射信号确定时,即信号的波长以及与天线法线的夹角确定时,相位差的测量精度主要与基线的长度有关,基线的长度越长,相位差的测量精度越高。
然而,由于相位测量的结果只能在[-π,π)之间,所以,如果基线长度大于1/2信号的波长时,相位差会超出这一区间,反演出的角度不唯一,从而产生相位模糊性问题[4]。
2 复相关运算解模糊
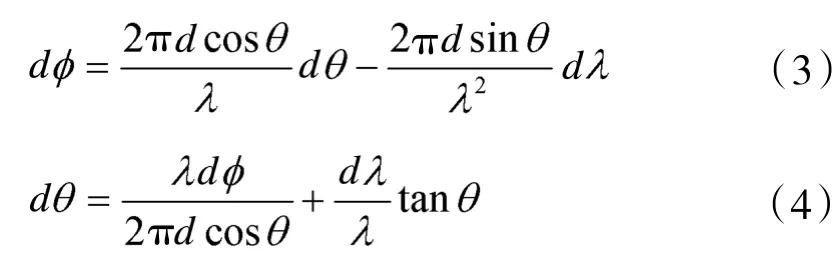
如图2所示,当阵元A、C间的基线长度大于所测信号的半个波长时,信号波前到达天线阵元A、C时的相位差就会存在相位模糊[5-6]:

图2 长短基线干涉仪
解模糊的关键点在于确定测得相位差φAC的模糊区间数,即式(5)中的K值。
复相关运算解模糊方法就从确定K值入手,确定K值的取值范围,列出所有可能存在的模糊区间数,利用所有可能的信号来向反推出阵元B、C相对于参考阵元A的相位差,并通过DFT变换以及相关系数的计算,确定信号的真实来向。具体过程参见文献[5]。
该方法用长基线测得相位差反推出短基线的不模糊相位差,充分利用了在一定条件下,基线越长,测向精度越高的特点,避开了短基线测向精度差的缺陷,并且只需要对一组模糊值进行判别,与立体基线法相比,抗噪声干扰的能力强。
但是通过对复相关运算解模糊方法进行仿真验证时,发现该方法在实际应用中存在局限性:①信号入射角较小时,无法进行正确解模糊。②长基线与短基线之比较小时,无法进行正确解模糊(例如长短基线比为2)。
通过分析,不难发现该方法在信号入射角较小时,没有考虑长基线测向的不模糊区间,长基线测得的相位差可能不存在模糊,但该方法也认为是存在模糊的,并进行后续的复相关运算,所以得到了错误的结果。
如图3所示,以2 GHz的射频信号,短基线长度为半波长,长短基线比为3的干涉仪系统为例。当信号入射角较小时,该方法无法测向。
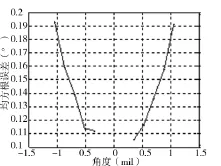
图3 复相关法解模糊均方根误差
针对仿真中发现的该方法的局限性,本文在此基础上提出了一种改进的复相关运算解模糊方法:
首先确定长基线测量结果的不模糊区间[7],

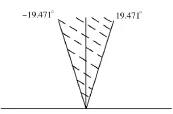
图4 长基线不模糊区间
图4中虚线表示的区域就是无模糊测向范围,当入射角属于这一范围时,长基线的测向结果不存在模糊情况,然而上述复相关算法依然认为存在模糊情况,反推可能的信号来向时将正确的信号来向忽略掉了,所以产生了解模糊错误。
改进的复相关算法中,在确定K的取值范围之后,将k=0这种可能性也加以考虑,即由测得的相位差反推出2m+1种信号的可能来向,得到2m+1组方向矢量。
再将方向矢量分别与输出信号频域矢量进行复相关处理,计算它们的相关系数,则可以正确地解模糊。
图5是用改进的复相关解模糊方法得到的上例的测向结果:
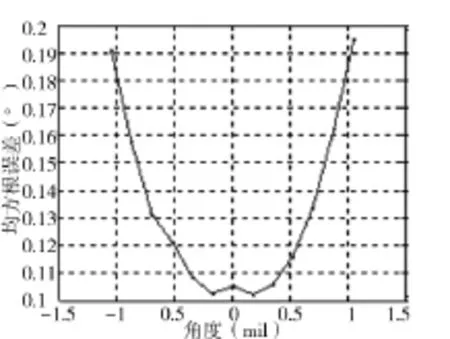
图5 改进复相关法解模糊均方根误差
3 阵元设计方法
在相控阵天线上选取一维线阵,每个阵元之间的距离设为d。d的值要依据将要进行测向的信号频率范围中的最大频率fmax来确定,求出fmax对应的信号波长min,为了保障最短基线不存在相位模糊,d的值应选择min/2。
本次试验中所测量的信号范围为0.7 GHz~2 GHz,所以d的值应根据频率2 GHz的信号的波长来确定,d=0.075 mm。
一般的相位干涉仪中,由于天线布局的灵活性,不同阵元间的间距可以是d的非整数倍,而与一般的相位干涉仪不同的是,相控阵干涉仪中,天线布局已经确定,所以不论如何选取阵元,不同阵元间的基线长度总是d的整数倍,这就给解相位模糊带来了困难,提出了更高的要求。
所以在这种情况下,如何选取阵元,在保证正确解模糊的前提下,减小误差,达到预期的测向效果是本次设计研究的重点内容。
本次阵元设计方法的流程图如图6所示:

图6 设计方法流程图
本次设计的仿真条件:信号为0.7 GHz~2 GHz的射频信号,入射角为30°。
预期达到的测向误差要求为:在信噪比为5 dB以及最大通道相位误差为5°的时候,测向结果误差小于0.2°,并且当信噪比不变,最大通道相位误差增加到15°时,测向结果误差小于0.45°。
3.1设计最长基线
由于阵元间的基线长度和信号波长的测量精度比较高,所以这些因素对干涉仪测向结果的精度影响较小,根据式(4)可知,干涉仪测向的误差可以表示为[1]:

此次干涉仪设计是基于宽带相控阵雷达的,所以可以认为覆盖张角为±60°,在覆盖张角内,其均方测向误差为:

可得:

假设相控阵天线按信号最高频率的半波长布阵,即相邻基线间距离d=min/2=0.075 m。根据期望的测向结果Δθ=0.2°,Δφ=5°,=0.15。
将上述条件代入式(9),可计算出D1=0.885= 11.8d,D1也就是理论上所需的最长基线长度。但是依据各基线的长度应该为半波长的整数倍这一约束条件,最长基线的长度应设计为:D1=12 d。
3.2设计次长基线
根据逐次解模糊的思想,最长基线的模糊要利用次长基线来解,所以在设计次长基线时,首先要就计算最长基线无模糊区:

最长基线最多存在M个模糊区间:

基线下的最大测向误差为:

为了能解模糊,基线下的最大测向误差需满足:

同时根据次长基线能解最长基线模糊的条件有:

根据基线的长度应该为半波长的整数倍原则,所以次长基线的长度可以选择2d、3d、4d、5d。考虑到本次设计采用的是逐次解模糊的思想,在一定条件下,基线越长,测向精度越高,所以次长基线D2=5d。
在实际工程应用中,由于受到天线单元的口径以及天线间互耦等因素的影响,物理上两单元天线间距不宜小于信号半波长甚至波长,需要采用虚拟阵元。但是在此次设计中,由于设计的干涉仪是基于相控阵天线的,而相控阵天线通常可以以半波长布阵,所以不存在对短基线长度的限制,本次设计中的短基线的长度可以选择不存在相位模糊的半波长。
4 仿真结果分析
通过上述方法计算出的多基线长度分别为:D1=12d,D2=5d,D3=1d。但这只是理想状况下理论计算得到的结果,下面就通过仿真来判断这组基线是否符合参数要求,并根据仿真结果按照流程图中的步骤进行阵元优化。此外,本次设计中对设计方案进行1 000次的蒙特卡洛仿真,若测向结果满足误差要求的概率达到95%以上,则认为该方案可以满足预期的误差要求。
首先判断当最长基线为D1=12d时,针对0.7 GHz~2 GHz的射频信号,能否满足预期误差要求。根据流程图,若满足预期,本着精简系统的原则,将最长基线D1减小一倍半波长,即D1=11d,并重新计算次长基线D2,反之增加一倍半波长,以此类推。
在最大通道相位误差5°,信噪比在5 dB~20 dB范围内的条件下,通过仿真可以得到图7[9]。
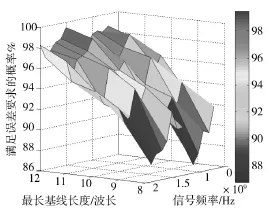
图7 不同频率和基线长度条件下仿真图
在图7上加入一个垂直于z轴的概率为95%的横截面并观察其俯视图得到下图,无色区域代表该区域概率小于95%,深色区域代表该区域概率大于95%,并且颜色越深概率越高。这样可以更加直观地观察出满足预期测向误差要求的最长基线可选的最小值。
从下页图8中可以看出当D1=12d时,测量结果的均方根误差可以满足预期要求,而且距离预期要求仍有一定富余,所以本着尽量精简系统长度的原则,应选择可以满足预期要求的最小D1,即D1=11d,计算得到D2=5d,D3=1d。
预期目标中还要求当最大通道相位误差达到15°时,测向结果的均方根误差要小于0.45°,所以针对D1=11d,D2=5d,D3=1d的干涉仪系统进行仿真,可以得到图9。
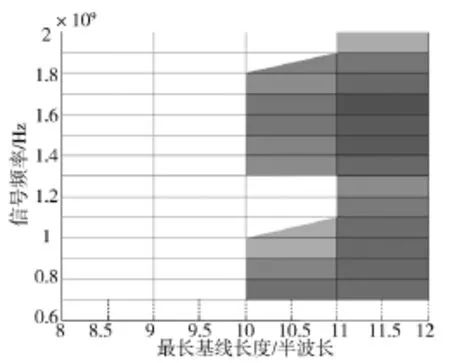
图8 最长基线长度选择示意图
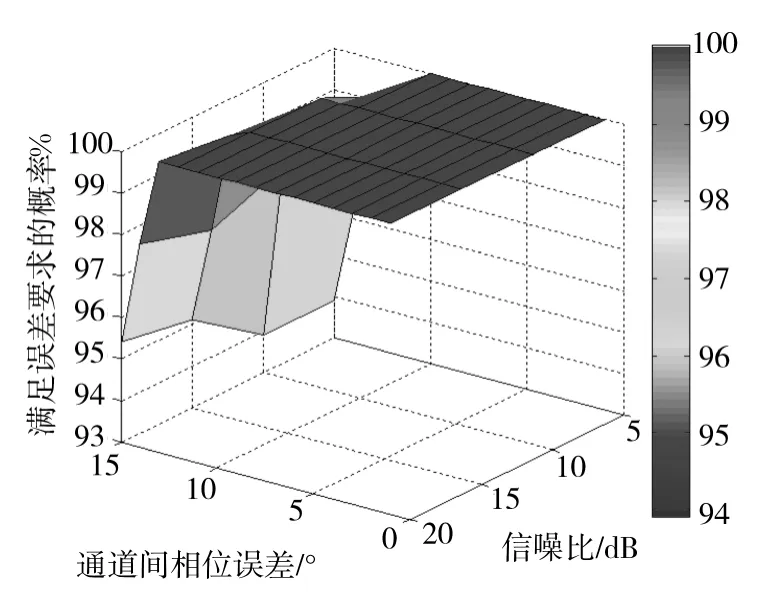
图9 D1=11d时系统仿真图
图9可以看出在信噪比较小和通道间相位误差较大的情况下,测向结果满足预期误差要求的概率不足95%。
所以将最长基线增加一倍半波长,即D1=12d时,相应D2=5d,D3=1d,系统在接收机通道间最大相位误差达到15°时,进行仿真可以得到图10。
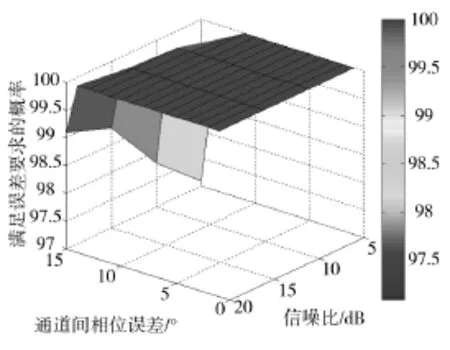
图10 D1=12d时系统仿真图
从图10中不难发现在信噪比和通道间相位误差变化的范围内,该系统测向结果满足预期误差要求的概率都在95%以上。
所以按照上述的预期误差要求进行设计后,本次宽带相控阵多基线干涉仪的设计结果为D1=12d,D2=5d,D3=1d。
该系统在不同信噪比条件下,1 000次蒙特卡洛实验后得到的测向结果的均方根误差如图11所示。
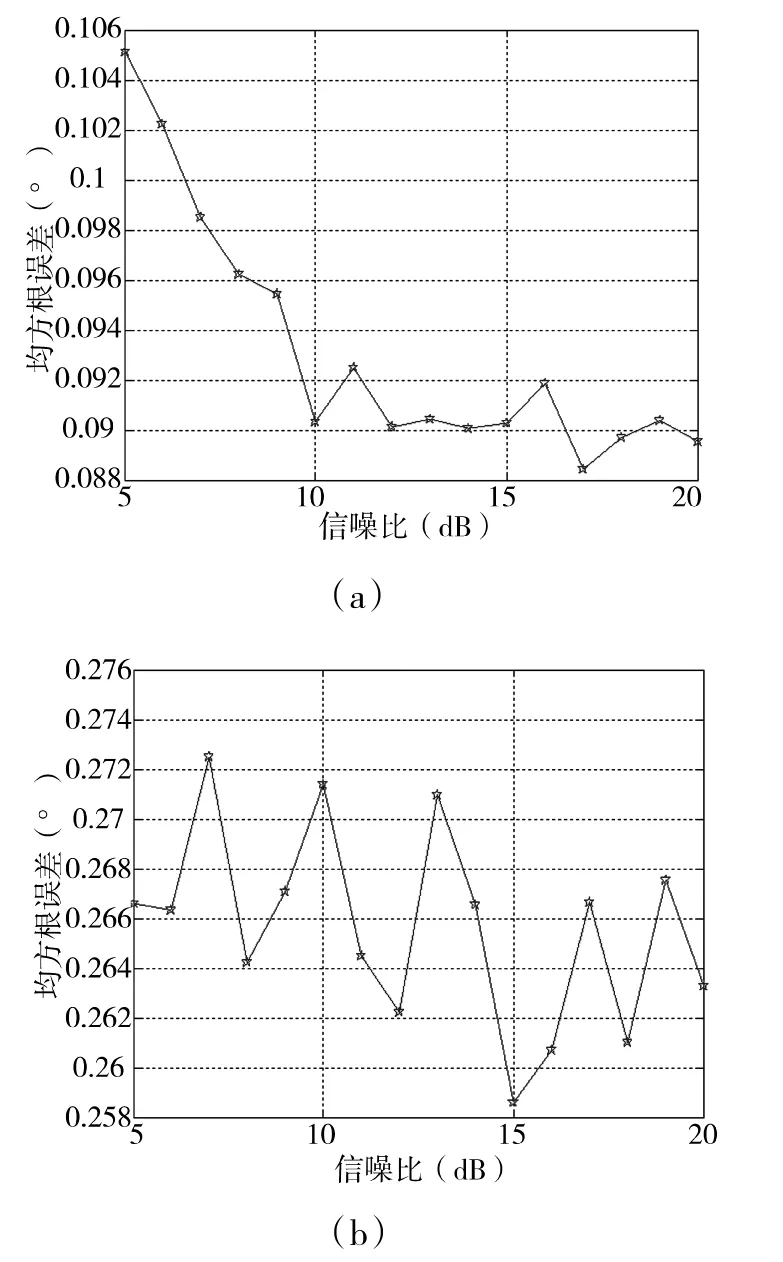
图11 不同信噪比条件下均方根误差变化图
图11(a)为最大通道相位误差为5°的情况,图11(b)为最大通道相位误差为15°的情况。
从图11可以看出,该系统的测向精度完全可以符合预期要求。在此基础上改变预期误差要求,依照该方法再次进行基线设计,进行仿真,可以验证该设计方法的可行性和有效性。
例如:①信噪比为5 dB以及通道间相位误差为3°的时候,测向结果误差小于0.1°,并且当信噪比不变,通道间相位误差增加到10°时,测向结果误差小于0.3°,设计结果为:D1=15d,D2=7d,D3=1d。②信噪比为5 dB以及通道间相位误差为1°的时候,测向结果误差小于0.05°,并且当信噪比不变,通道间相位误差增加到10°时,测向结果误差小于0.25°,设计结果为:D1=14d,D2=6d,D3=1d。
5 结束语
实际工程中由于完全消除接收机通道间的相位误差几乎是不可能实现的,所以这就要求运用的解模糊算法具有较强的抗干扰能力,即便在接收机通道间的相位误差较大的情况下,依然能够有较高的正确解模糊概率[10]。本文采用的复相关解模糊方法具有较强的抗干扰能力,并通过分析,修正了该方法,克服了其存在的局限性,拓展了应用范围。
此外,将干涉仪测向应用于宽带相控阵雷达中,充分发挥了干涉仪覆盖范围广,测向速度快,截获概率高以及相控阵雷达作用距离远、测量精度高等特点。
本次设计区别于传统的多基线干涉仪设计,需要结合相控阵天线布阵的特点,即基线间距必须为最短阵元间距的整数倍,在此条件的约束下,实现宽带相控阵多基线干涉仪的设计,拓宽了干涉仪测向的应用范围,为干涉仪与相控阵雷达的结合提出了一种设计方法,具有一定的实际工程应用价值。
[1]张光义.相控阵雷达技术[M].北京:电子工业出版社,2006.
[2]袁孝康.相位干涉仪测向定位研究[J].上海航天,1999,15(3):1-7.
[3]陈海忠,赵巾卫,朱伟强.数字式干涉仪测向技术鉴相算法研究[J].航天电子对抗,2004,19(4):30-33.
[4]司伟建,初萍.干涉仪测向解模糊方法[J].应用科技, 2008,34(9):54-57.
[5]韩广,王斌,王成.相关运算在相位干涉仪解模糊中的应用[J].声学技术,2010,21(5):538-542.
[6]王磊,束坤.干涉仪测向中相关处理算法的研究[J].舰船电子对抗,2010,33(4):87-90.
[7]梁双港.基于相位干涉仪测向算法的定位技术研究[D].西安:西北工业大学,2006.
[8]李建军.多基线干涉仪测向的基线设计[J].电子对抗,2005,20(3):8-11.
[9]张伟华,邹芳,张文明,等.通道间幅度相位不一致对干涉仪测向的影响和解决办法[J].电子与信息学报,2007,29(5):1240-1242.
[10]Wiley R G.雷达信号截获与分析[E].电子情报(ELINT),2008.
A Designed Method of Multi-baseline Interferometer Based on Wide-band Phased Array Radar
ZHAI Xiao-yu,WANG Jian
(China Shipbuilding Industry Corporation 724 Research Institute,Nanjing 210015,China)
The phase interferometer is applied to the wideband phased array radar,using a multiple correlation operation to solve the long-baseline ambiguity.For the limitations of the method in the simulation process,an improved method is proposed.Due to the phased array antenna layout has been determined,the baseline length can only use an integer multiple of a half wavelength.Under the constraint conditions,in order to minimize the number of array antenna and solve the ambiguity to guarantee the accuracy of measuring,a designed method of multi-baseline interferometer is proposed based on wide-band phased array for 0.7-2GHz wide-band RF signals,and the simulation results show that the method is effective and feasible.
wide-band phased array,multi-baseline interferometer,multiple correlation operation,phase ambiguity,array design
TN95
A
1002-0640(2015)08-0155-05
2014-06-05
2014-08-27
翟晓宇(1990-),男,江苏宿迁人,硕士研究生。研究方向:雷达信号处理。
猜你喜欢
九江学院学报(自然科学版)(2022年2期)2022-07-02
导航定位学报(2021年5期)2021-10-13
煤气与热力(2021年3期)2021-06-09
化工管理(2021年7期)2021-05-13
科学(2020年5期)2020-11-26
航天电子对抗(2019年4期)2019-06-02
舰船电子对抗(2019年6期)2019-04-27
电子制作(2019年24期)2019-02-23
航天返回与遥感(2018年3期)2018-08-10
制导与引信(2017年3期)2017-11-02
