
基于目标拆卸的虚拟拆装过程建模
2015-12-06 09:33张均东高跃峰
图学学报 2015年6期
王 昊, 曾 鸿, 张均东, 高跃峰
(大连海事大学轮机工程学院,辽宁 大连 116026)
基于目标拆卸的虚拟拆装过程建模
王昊, 曾鸿, 张均东, 高跃峰
(大连海事大学轮机工程学院,辽宁 大连 116026)
针对目前基于层次关系模型和关联关系模型的虚拟拆装系统中未考虑目标拆卸的问题,在原有层次关系模型基础上引入跳跃拆卸路径的概念,对基于层次关系模型和关联关系模型的拆装结构模型进行了完善和优化。对引入跳跃拆卸路径后的拆卸模型进行序列规划,并针对拆装决策过程中拆装单元的组合与还原问题进行论述,最后建立基于关联关系模型的目标拆卸算法。以船用分油机进行实例验证,验证结果表明该模型能够很好地解决目标拆卸的问题,对相关应用系统开发具有一定的参考价值。
目标拆卸;跳跃拆卸路径;序列规划;分油机
基于虚拟现实技术(virtual reality,VR)的虚拟拆装是实际拆装过程在计算机上的本质体现,是采用计算机仿真与虚拟现实技术,通过协同工作的模式来实现设备的拆装设计分析、拆装过程的规划与验证、拆装操作训练以及最终实现虚拟拆装评估的过程。针对轮机设备的虚拟拆装,主要侧重于拆装训练和操作评估。然而基于现实的拆装需要购置大量的设备,成本费用较高,受人员(有些拆装操作需要多人配合完成,如主机的拆装)、场地、时间的限制,并存在一定的安全风险。与此同时,随着计算机软/硬件的发展,基于虚拟现实技术的虚拟拆装系统成为一种比较经济、有效、快速的替代方式,可以使用户在虚拟环境内通过输入/输出设备进行交互以达到预期的训练效果,大幅度提高了效率并节约了成本,还可以使用户(船员、学生等)熟悉设备的原理,积累拆装经验,为实操奠定基础。
为使虚拟拆装真实体现实际拆装过程的本质,应对设备的拆装过程进行建模,包括拆装信息模型、配合约束模型以及拆装结构模型等。目前针对拆装结构模型的建模方法主要包括层次关系模型和关联关系模型以及两者的综合运用,如曾鸿等[1]、钟振龙等[2]在拆装过程建模中应用的装备树模型,其实质是一种层次关系模型,陶松桥和黄正东[3]提出的基于属性邻接图匹配的装配体模型实质上是一种关联关系模型,黄涛等[4]提出的基于 Project软件对装备拆装过程的建模模型是对层次关系模型和关联关系模型的综合运用。上述研究在设备虚拟拆装系统的过程建模方法上做出了积极探索,但均未考虑在实际的拆装维修过程中可能不需要把所有的零部件都拆掉(整体拆卸),而只是需要拆卸某个特定的零部件(目标拆卸)的问题。
本文将跳跃拆卸路径的概念引入到虚拟拆装结构模型中,对现有的层次关系模型和关联关系模型进行完善和优化,解决拆装过程中存在的目标拆卸问题,并以船用分油机的拆装过程为例进行了实例验证分析。
1 基于层次关系和关联关系的拆装结构模型
为保证设备虚拟拆装过程的真实性和有效性,除了建立逼真的三维模型之外,对设备的拆装过程进行建模也是很有必要的。拆装过程建模是虚拟拆装研究的关键技术之一,建立有效的拆装过程模型是实现有效拆装和优化拆装过程的基础。在面向拆卸的设计(design for disassembly,DFD)和面向装配的设计(design for assembly,DFA)研究设计中,常见的设备拆装结构模型概括起来主要包括层次关系模型和关联关系模型。主要的建模方法有 IDEF3方法[5]、Petri网方法[6]、CPM/PERT方法[7]、甘特图方法[4]、有向图[8]等。
1.1层次关系模型
在层次关系模型中,模型按照“设备→拆装组件→子拆装组件→基本拆装单元”的层次关系进行描述[4],一个设备可以分为不同层次的子装配体和零件,如图 1所示。在装配过程中,先由零件组成装配体(部件或组件),再参与整机的装配;在拆卸过程中,先将设备分解成装配体、子装配体,直至分解到目标零部件。设备各零部件之间关系可由层次结构来表示。但层次关系模型对同一层次各装配单元之间的装配关系的描述不够直观,无法充分描述实际设备的拆装结构约束关系和拆装序列。

图1 层次关系模型
1.2关联关系模型
在关联关系模型(图2)中,节点表示零部件,节点间的连线表示零部件之间的配合约束关系[4]。根据连线有无方向性,模型可分为有向图和无向图。有向图中,节点间的连线是有向边,连线的方向表明了约束之间的先后制约关系;无向图中,节点间的连线是无向边,无法描述约束彼此之间的先后关系。关联关系模型比较直观,便于各种信息的存取管理和后续直接利用。信息描述往往在同一层次进行,可以很好地描述同层零部件的装配关系,但不符合设备实际的构造习惯,且当零部件数目较多时,节点数量增多,在进行算法搜索时比较困难。

图2 关联关系模型
装配体零部件间的关联关系可以用式(1)表达:

2 基于层次关系和关联关系的目标拆卸拆装过程建模
由上面的分析可知,两种模型各有长短,为此拆装结构建模往往采用关联关系模型和层次关系模型相结合的策略。另外考虑到实际的拆装活动的特点,对现有的层次关系模型和关联关系模型进行改进,在层次关系和关联关系的基础上引入跳跃拆卸路径的概念,形成以满足目标拆卸的拆装结构模型(如图3所示)。该模型同一层次零部件之间的配合约束关系用关联关系模型表示,该关联关系模型以有向图为基础,并引入虚约束和无向约束的概念作为模型的改进和补充,以满足实际拆装顺序规划的需要。

图3 目标拆装结构模型
从模型中可以看出,在设备的拆装过程中,常常将相关的零部件化为一组,在拆卸时先将该组件或部件整体拆卸下来,然后再对其组成零部件进行拆卸。这样,可将这组零部件组合起来,当作一个新的部件,忽略其中的内部约束,仅描述外部约束即可。如图 3所示,拆装单元 P221,P222,…组合成子拆装组件 P21;拆装单元 P21,P22,…组合成拆装组件P2。组合时,将外部约束集中到组合后的一个新的节点上,而将内部约束自动解除,P223所在拆装层次对应的关联关系模型中将P221,P222,P223组合成新节点P21,忽略内部约束C、E(见图4),外部约束A、B、D(见图5)集中到 P21所在拆装层次对应的关联关系模型中的P21上。这样可以大大简化拆装模型。

图4 P223所在层次对应的关联关系模型

图5 P21所在层次对应的关联关系模型
拆装组件和基本拆装单元是描述设备的两个基本元素。对于每个拆装组件,其描述结构包括两种数据,即组成数据和组成之间的关系数据。各级拆装组件的隶属组成关系形成层次模型,处于同一层次的组成单元之间的配合约束关系成关联关系模型。
2.1跳跃拆装路径的引入
跳跃拆装路径是指当一个零部件可以直接从较高层次上拆卸下来,而不严格遵从层次结构关系确定的拆卸路径进行拆卸。如图 3所示,遵循层次结构关系时,对于拆装单元P21,其拆卸路径为 P2→P21;对于拆装单元 P223,其拆卸路径为P2→P21→P223。然而对于目标拆卸,即针对某一部件进行拆卸时,考虑到拆卸过程中最小拆卸原则的要求,即不需要拆卸的部分尽量保留不动,以减少拆卸的工作量。同样对于拆装单元P223,跳跃拆卸路径为P2→P223。
跳跃拆卸路径是针对目标拆卸提出的,对于设备进行的整体拆卸,不考虑跳跃拆卸路径,仍按层次模型中的拆卸路径进行拆卸。
2.2拆装决策过程中拆装单元还原
然而,在目标拆卸过程中,当遇到跳跃拆卸路径时(图3中虚弧线所示),就涉及到拆装单元还原的问题,还原可看作是组合的逆过程。即对于拆卸单元P223存在的跳跃拆卸路径P2→P223,首先仍利用P2所在拆装层次对应的关联关系模型对P2进行目标拆卸,这时将P21还原成P221,P222,P223,并恢复内部约束 C、E,外部约束相应地分配给P221,P222,P223。其中,约束A、B指向P222,约束D指向P223(见图6)。然后利用还原后P223所在拆装层次对应的关联关系模型(见图4)对P223进行目标拆卸。
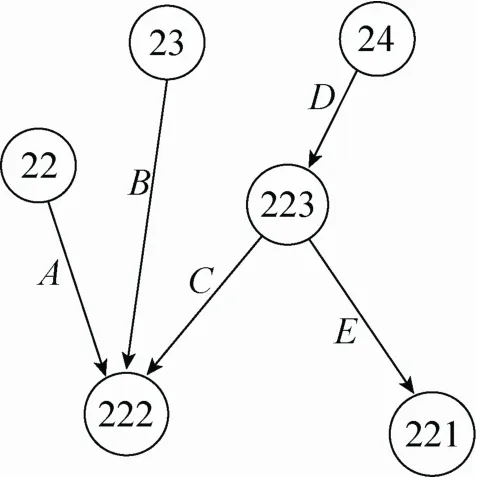
图6 还原后P21所在层次对应的关联关系模型
可见,在拆装单元还原后,相应的层次关系模型和关联关系模型都有所改变,该单元的拆装层次由三层改为两层,被还原的单元P21所在层次对应的关联关系模型也由图5变为图6。其中,各层次对应的关联关系模型如图4~6所示。
2.3目标拆卸序列规划
在目标拆卸中应尽量减少拆卸的工作量,即不需要的零部件尽量保留,目标拆卸不严格遵循层次模型所隐含的“总成→部件→组件→零件”的拆卸顺序。对于目标拆卸规划,目的是得到为获取目标零部件所必须解除的拆卸约束关系及顺序,而不是需要拆卸的零部件的顺序。在实际的拆装过程中便存在这样的情况,当对某一个拆装单元进行目标拆卸时,并不需要将其父节点先拆卸下来,甚至其父节点的父节点也不需要解体,仅仅需要解除部分约束,便可直接从其所在的拆装层次的上一级或更高层次上拆卸下来。当然,目标件如果不存在跳跃路径,则从树模型中搜索拆卸路径,目标拆卸的拆卸顺序规划如图7所示。

图7 目标拆卸序列规划流程
在进行目标组件的拆卸时,首先判断其父节点是否为根节点,若是,则根据层次关系模型中Ⅰ级拆装基准层对应的关联关系模型调用目标拆卸算法对目标组件进行拆卸规划;若不是,则依据层次关系模型搜索拆卸路径并判断搜索到的拆卸路径上的各节点是否有跳跃拆卸路径,若有,则给出存在跳跃拆卸路径后的目标拆卸件的拆卸路径,将被跳跃的中间节点还原得到还原后的拆装结构模型,此时按照搜索到的拆卸路径上各节点的先后顺序,根据各节点所在层次对应的关联关系模型调用目标拆卸算法,分别对各节点对应的拆装单元进行目标拆卸规划,从而得到目标组件的拆卸顺序;若没有,则按照层次关系模型路径上各节点的先后顺序,根据各节点所在层次对应的关联关系模型,调用目标拆卸算法,分别对相应的拆装单元进行目标拆卸规划。
2.4基于关联关系模型的目标拆卸算法
在设备拆卸序列的生成过程中,按照拆卸的目的不同可以分为完全拆卸序列算法和目标拆卸序列算法两种不同的形式。其中,完全拆卸序列的生成又可分为基于广度的拆卸序列、基于深度的拆卸序列以及两者结合的拆卸序列算法[9]。设备的目标拆卸序列可看作是完全拆卸序列的子序列,但又不等同于完全拆卸序列。目标拆卸序列的生成算法一般不采用完全拆卸序列的生成算法,因为其盲目性太大,会严重降低工作效率。本文采用反推法来生成目标单元的拆卸序列,具体步骤如下:
步骤1. 在设备的关联矩阵S中查找目标单元所对应的行,并进行检索,查找元素值为 1所对应的列所代表的单元,将其存入一个数组中;
步骤2. 在步骤1生成的数组中选择一个元素,在 S中查找该元素所代表单元所在的行,在行中进行检索,查找元素值为 1所对应的列所代表的单元,将其与上一步数组中存储单元存到一个新的数组中;
步骤3. 重复步骤2的做法,将查找到的单元与前几步数组中存储的不同单元存到一个新数组中;
步骤4. 按照步骤1~3的方法进行循环,直到所有搜索到的单元都为可拆卸单元时为止,这时,生成序列的反序即为目标单元所对应的拆卸序列。
由设备的关联矩阵可以看出要拆单元需要解除的约束关系。如果关联矩阵中某单元所对应的行中所有元素均为0,则表明该单元已被拆卸;如果所对应行没有值为 1的元素,则表明该行所对应的单元在产品中只与其他单元存在直接联系而无间接联系,即该单元可拆;相反,如果存在值为 1的元素,则表明该单元的拆卸受到其他单元的影响,该单元不可拆。
3 实例验证分析
分油机是船舶燃油、滑油的净化设备之一,分油机运行的好坏直接影响船舶的安全航行和经济效益。由于船舶对燃油、滑油要经常进行分离,因而分油机的拆装、测量、检查、清洗便是管理项目中一项经常性的工作。
由于船用分油机整体拆装相当复杂,本文以分油机分离筒本体的拆卸为例,建立其虚拟拆装过程模型。整个拆装过程的流程如图 8所示。当遇到目标拆卸件时,按照图 7所示流程规划图调用目标拆卸算法。
图9展示了基于Virtools 4.0的船用分油机分离筒部分组件的拆卸过程模型,在一定程度上表达了设备整体拆卸的序列规划。其拆装序列基本是按图 8所示的流程进行规划。对用户指定的目标组件是在整体拆装序列的基础上,判断其父节点是否为根节点,决定是否调用目标拆卸算法。对于不存在跳跃拆卸路径的目标件,仍然按照基于层次结构模型的整体拆卸序列进行拆卸。

图8 分离筒拆装流程图

图9 分离筒部分组件拆卸过程模型
利用这种模型能够适应不同的用户需求,即在要求整体拆卸的情况下直接调用整体拆卸序列规划的流程进行拆装;对于要求指定目标件的用户,按照引入跳跃拆卸路径后的模型进行拆卸,以提高工作效率,节省工作时间。图10展示的是船用分油机的实际拆装效果图。

图10 船用分油机虚拟拆装效果图
4 总 结
本文在原有层次关系模型和关联关系模型的基础上引入跳跃拆卸路径的概念,解决了基于层次关系和关联关系的拆装结构模型中未考虑目标拆卸的问题,使虚拟拆装更加贴近实际拆装过程的本质。对具有跳跃拆卸路径的拆装结构模型进行序列规划及拆装单元的还原,建立基于关联关系模型的目标拆卸算法。通过对船用分油机虚拟拆装进行实例建模与验证分析,说明该模型能减少虚拟拆装过程中的工作量,提高工作效率,安全环保,对相关应用系统的开发具有一定的参考价值。
[1] 曾鸿, 王心红, 张均东, 等. 面向实操评估的轮机虚拟拆装考试系统开发[J]. 中国航海, 2014, 37(1): 24-28.
[2] 钟振龙, 吴纬纬, 赵悦. 面向虚拟拆装的产品装配模型及其应用[J]. 制造业自动化, 2010, 32(7): 176-178, 232.
[3] 陶松桥, 黄正东. 基于属性邻接图匹配的装配体模型搜索方法[J]. 计算机辅助设计与图形学学报, 2011, 23(2): 290-297, 304.
[4] 黄涛, 张豫南, 李瀚飞, 等. 基于 Project的虚拟维修拆装过程建模[J]. 系统仿真学报, 2012, 24(1): 192-196.
[5] 牛东, 宁可, 李清, 等. 基于 IDEF3的过程建模方法及其支持工具[J]. 计算机集成制造系统, 2001, 7(12): 30-34.
[6] 刘家学, 刘涛, 耿宏. 基于Petri网和语义网络的虚拟维修过程建模与应用[J]. 图学学报, 2013, 34(2): 113-118.
[7] 尚洁, 容晓峰, 徐兴华. 基于 PERT图的虚拟拆装过程建模[J]. 计算机与数字工程, 2011, 39(3): 151-154.
[8] Zheng X X, Sun G Z, Wang S M. Researches on virtual prototyping presentation model based on directed acyclic graph [C]//The 9th International Conference on Computer Supported Cooperative Work in Design Proceedings, 2005: 633- 637.
[9] 付战平, 赵化迎, 王云翔. 基于动态搜索的拆卸序列生成算法[C]//2007系统仿真技术及其应用学术会议论文集, 2007: 822-825.
Modeling of Virtual Assembly and Disassembly Process Based on Selective Disassembly
Wang Hao,Zeng Hong,Zhang Jundong,Gao Yuefeng
(Marine Engineering College, Dalian Maritime University, Dalian Liaoning 116026, China)
To solve the problem of not considering the selective disassembly in the current virtual disassembly system based on the hierarchy model and relationship model, the skipping disassembly path was introduced which developed and optimized the original hierarchy model and relationship model. The sequence planning of the disassembly model after introducing the shipping disassembly path was carried out. And the combination and reduction of disassembling units in the course of disassembly decision was described. Finally, the selective disassembly algorithm was established based on the relationship model. With the marine oil separator for example verification, the verification results showed that the model could solve the problem of selective disassembly very well. So this work has a certain reference value for the development of the related application system.
selective disassembly; skipping disassembly path; sequence planning; oil separator
TP 391.9
A
2095-302X(2015)06-0903-06
2015-06-03;定稿日期:2015-08-08
中央高校基本科研业务费专项资金资助项目(3132013030)
王昊(1992–),男,河南周口人,硕士研究生。主要研究方向为轮机系统建模与仿真。E-mail:haowong@yeah.net
曾鸿(1981–),男,福建福鼎人,副教授,博士。主要研究方向为轮机系统建模与仿真。E-mail:kevinzeng2006@126.com
猜你喜欢
机械工业标准化与质量(2022年6期)2022-08-12
新世纪智能(数学备考)(2021年9期)2021-11-24
中学生数理化(高中版.高考理化)(2020年11期)2020-12-14
装备制造技术(2020年2期)2020-12-14
河南科技学院学报(自然科学版)(2020年2期)2020-05-22
当代陕西(2019年15期)2019-09-02
电子制作(2018年17期)2018-09-28
通信电源技术(2018年5期)2018-08-23
学苑创造·A版(2018年11期)2018-02-01
读者(2017年5期)2017-02-15
