
大学生方程式赛车悬架设计研究
2015-12-12 05:22冯金芝郑松林
通信电源技术 2015年2期
庞 博,冯金芝,郑松林
(上海理工大学 机械工程学院,上海,200093)
大学生方程式赛车悬架设计研究
庞博,冯金芝,郑松林
(上海理工大学 机械工程学院,上海,200093)
摘要:通过几何法为大学生方程式赛车设计了前、后悬架的导向机构,并提出了通过弹簧长度与车轮跳动量之间的关系曲线来确定悬架传动比的方法;利用Adams/Car软件建立了整车多体动力学模型并进行了操纵稳定性虚拟仿真试验。仿真结果表明所设计的前、后悬架在保证传动比恒定的同时可以使赛车具有良好的不足转向特性和转向回正性能。
关键词:悬架;传动比;操纵稳定性
1 研究背景
与轿车悬架不同,由于车架的限制,导致赛车悬架系统中的减震器和弹簧不能直接与车架相连,为了保证赛车平稳行驶和衰减振动的需要,需在减震器(弹簧)和悬架横臂之间加装一推杆或拉杆以传递赛车行驶过程中的垂向力,如图1所示。在赛车转向行驶时,由于赛车的载荷转移使得悬架系统的垂向刚度成为了影响汽车操纵稳定性的重要因素。车轮跳动量与弹簧长度变化量之比(传动比)是联系车轮中心刚度和弹簧刚度之间的桥梁。理想的传动比特性在车轮跳动的过程中应维持一定值,这样的传动比可以简化弹簧的设计难度,然而由于赛车的空间限制和推杆的加装使得弹簧轴线不一定沿垂向布置,这使得获得恒定的传动比成为了赛车悬架机构设计的难题。
国外对大学生方程式赛车的研究起步较早,文献[5]中对赛车系统动力学进行了详细的论述,并首次提出了悬架机构中传动比的概念;文献[2]中分析了车轮定位参数对赛车行驶性能的影响,但是并未给出如何确定赛车悬架机构的方法。随着2010年首届大学方程式赛车在中国的举办,国内越来越多的高校开始积极投身于该项赛事。文献[1]和文献[3]中通过三视图法确定了赛车悬架导向机构的硬点坐标,但并未对所设计的赛车进行动态分析;文献[9]中建立了赛车多体动力学模型,并进行了赛车操纵稳定性分析,但并未介绍赛车悬架的初始设计方法;文献[10]中,确定了转向回正时残余横摆角速度与主销定位角度的数学关系,并在此基础上对赛车的主销内倾角进行了优化。
由于技术原因和车队保密需求,国内外车队对其赛车悬架机构设计方法,尤其是关于如何得到恒定传动比的悬架机构介绍甚少。本文对赛车的悬架机构进行了设计,以得到恒定的传动比为目标,建立了弹簧长度相对车轮跳动量的函数。在Adams/Car中建立了整车多体动力学模型,并进行了稳态回转仿真试验和低速转向回正仿真试验,试验结果证明所设计的悬架系统可以保证赛车对操纵稳定性能的需求。
2 悬架结构选型
2.1 悬架结构的确定
不等长双横臂悬架由于其结构相对简单且具有良好的运动学特性,长期以来一直被方程式赛车所亲睐[1]。赛车中的双横臂悬架一般有推杆不等长双横臂悬架和拉杆不等长双横臂悬架两种设计方案,考虑所选钢管材料的抗压性能大于其抗拉性能,故为赛车选取了上下横臂不等长的推杆悬架,前、后悬架的机构图如图1所示。
2.2 车轮定位参数的确定
对于外倾角,赛车与普通轿车存在一定差异,在赛车中通常选取负的车轮外倾角,对前轮应用负的前束角可以为赛车提供更好的操纵性能并有助于转向回正,而对后轮施加正的外倾角则有助于提高赛车在行驶过程中的稳定性[2]。主销内倾角和主销外倾角的作用是使车轮在行驶过程中产生回正力矩,从而提高车辆的直线行驶稳定性、行驶方向保持性以及车轮转向后的回正性能[3]。
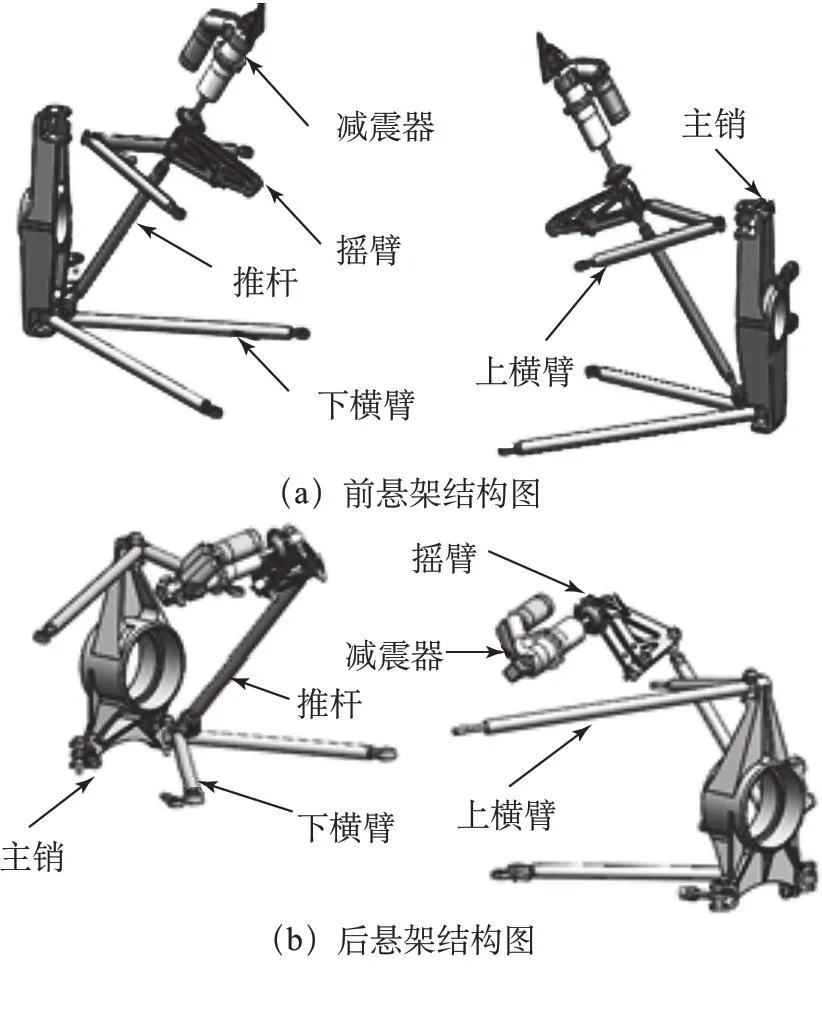
图1 悬架结构图
借鉴国内外车队的设计经验,选取的初始悬架车轮定位参数如表1所示[1,2,4]。

表1 车轮定位参数
3 悬架导向机构设计
3.1 导向机构正视图
双横臂悬架导向机构的正视图如图2所示。
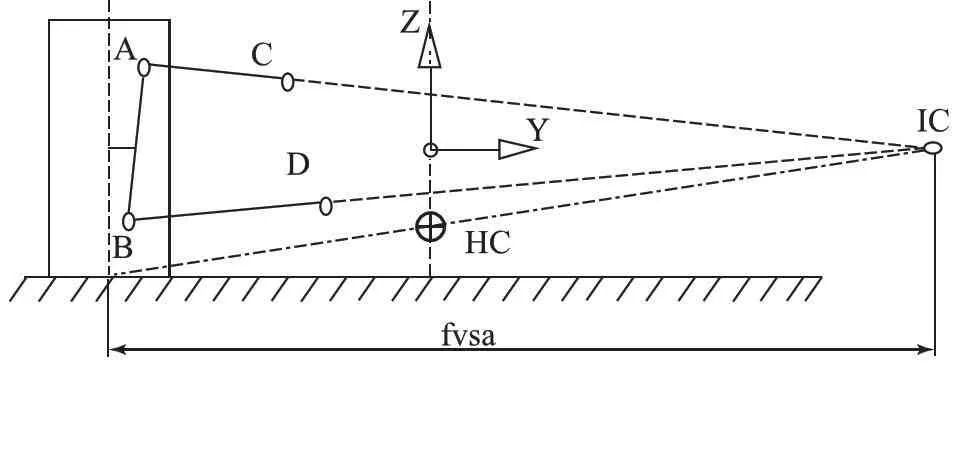
图2 双横臂悬架导向机构正视图注:AB—主销轴线;AC—等效上横臂;BD—等效下横臂;IC—瞬时转动中心;HC—侧倾中心
取前悬架外倾角变化率为0.063°/mm,后悬架外倾角变化率为0.071°/mm,结合式(1)[5],可计算出前悬架等效横臂长度为910 mm,后悬架等效横臂长度为809 mm。设前悬架侧倾中心高度为-20 mm,后悬架侧倾中心高度为50 mm[1]。通过几何法即可确定瞬时转动中心IC的位置。

(1)
式中:fvsa为等效横臂长度;ζ为外倾变化率。
瞬时转动中心IC即为等效上横臂AC与等效下横臂BD的延长线交点。根据轮辋直径和轮辐的偏置选取主销与下横臂的铰接点B的位置,选取前、后主销轴线长度为254 mm。研究表明上、下横臂长度与主销轴线长度的比值对车轮外倾角的变化影响很大,上、下横臂长度与主销轴线长度关系如式(2)所示[6]。
(2)
式中:lAB为球销中心距(mm);lAC为等效上横臂长度(mm);lBD为等效下横臂长度(mm)。
对于前悬架选取C1f=C2f=0.75,C1r=C2r=0.8[6]。由式(2)可计算出lAfCf=190 mm,lBfDf=363 mm,lArCr=203 mm;lBrDr=318 mm。
3.2 导向机构侧视图
双横臂悬架导向机构侧视图如图3所示。

图3 双横臂悬架导向机构侧视图注:E—上横臂与车架前铰接点;F—上横臂与车架后铰接点;G—上横臂与车架前铰接点;H—下横臂与车架后铰接点;ZC—纵倾中心
3.2.1抗制动纵倾性
抗制动纵倾性可使制动过程中汽车车头的下沉量及车尾的抬高量减小。悬架的抗制动纵倾性可用抗前俯率ηd表示[7]
(3)
式中:β为制动力分配系数;L为轴距;h为质心高度。
当EF、GH平行时,悬架的纵倾中心ZC位于无穷远处,则tanφ等于0,此时前悬架的抗前俯率ηd为0。如果ηd=0,则赛车在制动过程中的载荷转移将全部作用于弹簧,此时赛车前轮的下沉量为载荷转移产生的垂向力与车轮中心刚度的比值;如果ηd=100%,则制动过程中的载荷转移将全部由控制臂承受,汽车在制动过程中不会发生前俯现象[5]。
3.2.2抗驱动纵倾性
抗驱动纵倾性可减小后轮驱动汽车车尾的下沉量或前轮驱动汽车车头的抬高量[7]。与抗制动纵倾性相似,抗驱动纵倾性可用抗后仰率ηα表示。
当ηa=0时,赛车在加速过程中的载荷转移将全部作用于弹簧;当ηa=100%时,加速过程中的载荷转移将全部由控制臂承受,汽车在加速过程中不会发生后仰现象[5]。
确定悬架导向机构侧视图的首要任务是确定纵倾中心ZC的位置。为了降低悬架的叉臂在行驶过程中的负荷,设计时使其不承受纵向行驶所产生的载荷转移,令ηa和ηd均为0,即要求前、后悬架的上横臂和下横臂平行布置。令EF和GH平行于X轴,考虑车架的限制,设前悬架在纵向平面内上横臂长lEfFf=240 mm,下横臂长lGfHf=360 mm;设后悬架在纵向平面内上横臂长lErFr=330 mm,下横臂长lGrHr=360 mm。
至此前后悬架导向机构的侧视图已经确定,综合已经确定的三视图,选取前轴中心为坐标原点,可得前后悬架的空间机构图,如图4所示。通过测量可得前后悬架的硬点坐标。
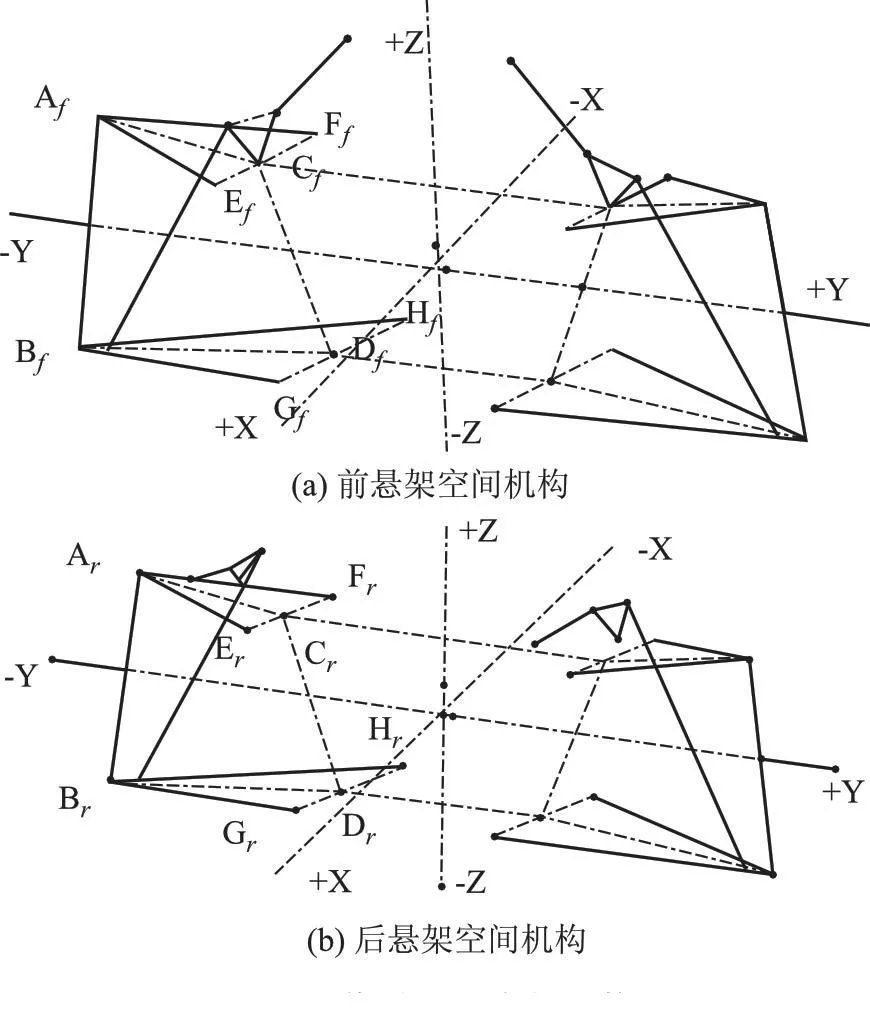
图4 前后悬架空间机构
4 推杆长度和摇臂安装位置的确定
导向机构确定后,悬架的推杆长度和摇臂的安装位置决定了悬架的传动比。车轮中心刚度与弹簧刚度的关系如式(4)所示[5]。
(4)
式中:KW为车轮中心刚度;FS为弹簧力;KS为弹簧刚度;IR为传动比;δ为车轮跳动量。

(5)
由传动比的定义可知弹簧长度与车轮跳动量的关系式为:
(6)
式中:Sl为弹簧长度,So为弹簧安装长度,本文中为200 mm。
由式(6)可知,若传动比恒定,Sl为δ的线性函数。
在Solidworks中建立悬架的三维机构,将上下横臂与车架的连接点E、F、G和H设置为固定约束,利用已经确定的横臂尺寸建立长度约束,改变轮心与地面之间的距离以模拟车轮跳动,可以得到悬架的传动比。改变推杆的长度和摇臂的安装位置,经过多次尝试,可以得到传动比为恒值的悬架机构。
在Adams/Car中建立前后悬架的多体动力学模型,如图5所示。
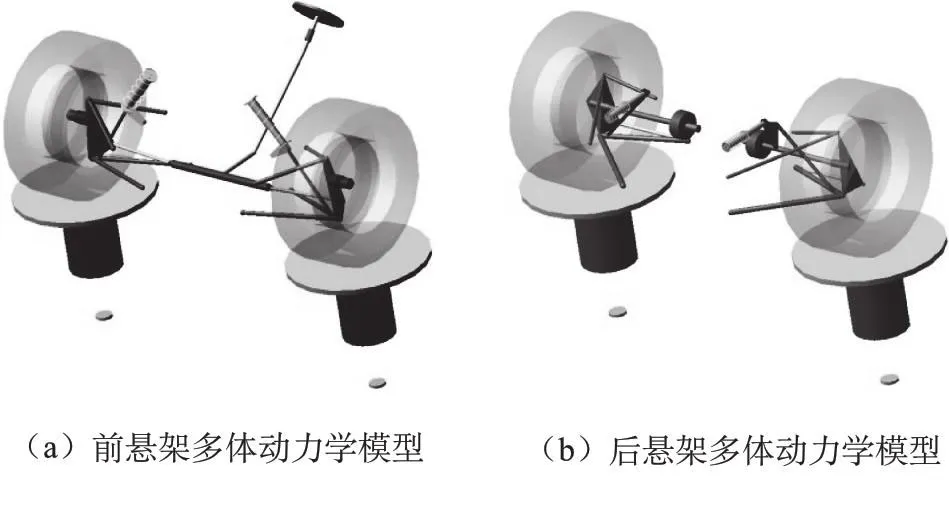
图5 前后悬架的多体动力学模型
对所设计的前后悬架进行双轮平行跳动仿真,可得到前、后悬架的弹簧长度随车轮跳动行程的变化曲线,如图6所示。

图6 前、后悬架弹簧长度随车轮跳动变化
由图6可知,前悬架的弹簧长度为车轮跳动量的线性函数。后悬架的弹簧长度与车轮跳动量呈一定的非线性关系,但是其斜率变化非常小,可近似为一线性函数。经计算得到前悬架传动比为1.19,后悬架传动比为1.72。
通过计算可得到悬架系统的刚度参数[1,5],如表2所示。

表2 刚度匹配值
5 整车操纵稳定性仿真试验
利用前文所设计的前、后悬架建立赛车多体动力学模型,在Adams/Car中进行了稳态回转仿真试验和低速转向回正仿真试验。建立的模型如图7所示。

图7 整车多体动力学模型
建立模型时所需的整车参数如表3所示。

表3 整车参数
5.1 稳态回转仿真试验
根据GB/T 6323.6-1994的要求,对赛车进行稳态回转仿真试验,选取转向半径比R/R0作为赛车稳态回转性能的评价参数[8]。在Adams/Car中设置初始稳定速度为10 km/h,之后调整方向盘转角,使其转弯半径为15 m,保持方向盘转角不变,以0.2 m/s2的加速度加速,当汽车的侧向加速度达到6.5 m/s2时停止试验,并记录整个仿真过程。转向半径比与侧向加速度的关系曲线如图8所示。

图8 转向半径比与侧向加速度关系曲线
稳态回转仿真试验结果分析:
当Ri/R0>1时,转弯半径随车速的增大而增大,赛车为不足转向。当Ri/R0<1时,赛车为过多转向,转弯半径随车速的增大而减小。操纵稳定性良好的汽车应该尽量避免汽车具有过多转向特性[9]。
由图10可知,所设计的赛车转向半径比R/R0大于1,表明赛车具有不足转向特性,因此赛车的稳态转向特性良好。
5.2 低速转向回正仿真试验
根据GB/T 6323.4-94的要求,对赛车进行低速转向回正仿真试验。在Adams/Car中设置转弯半径为15 m,当整车侧向加速度达到4 m/s2时,固定转向盘转角,待车速稳定后,松开转向盘并开始记录。松开转向盘后的侧向加速度和横摆角速度的时间历程如图9 所示。

图9 侧向加速度与横摆角速度时间历程
整理后的试验结果如表4所示。
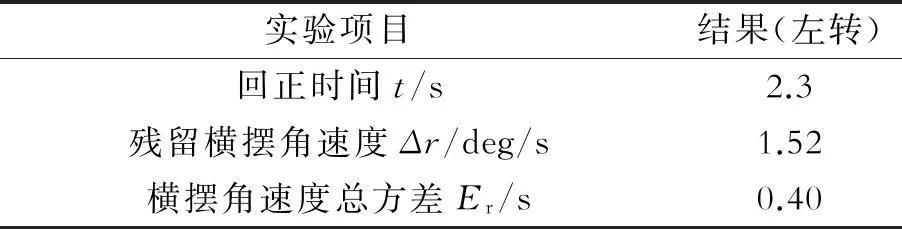
表4 低速转向回正仿真试验结果
低速转向回正仿真试验结果分析:
选取残留横摆角速度绝对值Δr及横摆角速度总方差Er两项指标进行评价计分[8]。在汽车的质量参数确定的情况下残留横摆角速度Δr为车轮外倾角β、主销内倾角λ以及主销后倾角λ的函数,即Δr=f(α,β,λ)[3],可通过期望的Δr得出α、β及λ的关系表达式,以此作为匹配车轮定位参数的参考依据。但是,由于本次设计时无法得到所有的确定参数,故无法根据上式确定理想的车轮定位参数,但是仍可以通过考察汽车的转向回正性能的评价指标残留横摆角速度Δr来考察车悬架的车轮定位参数及悬架导向机构设计的合理性。

6 结 论
(1)通过几何法为大学生方程式赛车设计了前、后悬架机构,并提出了一种通过弹簧长度与车轮跳动量之间的关系曲线来确定悬架传动比的方法。双轮平行跳动仿真试验结果表明在车轮跳动的过程中,前、后悬架的传动比可以维持一定值。
(2)利用所确定的整车参数建立了整车多体动力学模型,并进行了稳态回转试验和低速转向回正仿真试验。仿真结果证明所设计的悬架系统可以使赛车具有良好的稳态转向性能和转向回正性能。
参考文献:
[1]吴健瑜.大学生方程式赛车悬架设计及优化研究[D].广州:华南理工大学硕士学位论文,2011.
[2]Dennis Robertson, George J. Delagrammatikas. The suspension system of the 2009 cooper union FSAE vehicle: a comprehensive design review[J]. SAE International Journal of Passenger Cars: Mechanical Systems, 2010, 3(1):366-380.
[3]魏道高,周福庚,李磊,等.双横臂独立悬架的前轮主销内倾角算法研究[J].汽车工程,2005,(04):431-433.
[4]李嫚. FSAE赛车悬架的优化设计及分析[D]. 哈尔滨:哈尔滨工业大学硕士学位论文,2011.
[5]WFMilliken, DL Milliken, LDMetz. Race car vehicle dynamics[M]. Warrendale: Society of Automotive Engineers, 1995.
[6]杨波,左曙光,覃霍,等.双横臂独立悬架导向机构硬点匹配设计[J].机械设计与制造,2010,(10):65-67.
[7]王望予.汽车设计[M].北京:机械工业出版社,2007.
[8]冯金芝,胡学坤,郑松林,等.轿车操纵稳定性的虚拟试验研究[J].上海理工大学学报,2013,(01):65-70.
[9]刘美燕.FSAE赛车悬架仿真分析及操纵稳定性虚拟试验[D].长沙:湖南大学硕士学位论文,2008.
[10]陈思忠,倪俊,吴志成.基于转向轻便性与回正性的方程式赛车主销内倾角优化[J].工程设计学报,2012,19(1):31-56.
冯金芝(1973-),女,讲师,研究方向:现代汽车设计理论。
研制开发
Design and Study of Suspension for a Formula SAE Car
PANG Bo, FENG Jin-zhi, ZHENG Song-lin
(School of Mechanical Engineering, University of Shanghai for Science and Technology, Shanghai 200093, China)
Abstract:Guiding mechanism of FSAE front and rear suspension is implemented by geometric method and a method for determining the suspension motion ratio from spring length-wheel travel curve is proposed. With the help of Adams/Car, multi-body dynamic model of the whole car is established and virtual simulation of handling stability is conducted. The results show that the suspension designed can make the car has good under-steer characteristic and steering return-to-center performance with constant motion ratio.
Key words:suspension; motion ratio; handling stability
收稿日期:2014-12-10
中图分类号:U463
文献标识码:A
文章编号:1009-3664(2015)02-0025-04
作者简介:庞博(1990-),男,吉林通化人,硕士研究生,研究方向:现代汽车设计理论;
基金项目:上海市科委计划项目(11140502000)资助。
猜你喜欢
青少年科技博览(中学版)(2022年11期)2023-01-07
汽车零部件(2020年7期)2020-08-03
制造技术与机床(2019年6期)2019-06-25
汽车实用技术(2019年9期)2019-05-15
汽车实用技术(2018年15期)2018-08-29
神州·中旬刊(2018年5期)2018-06-07
北京汽车(2016年6期)2016-10-13
汽车实用技术(2015年8期)2015-12-26
汽车实用技术(2015年8期)2015-12-26
湖南大学学报·自然科学版(2014年2期)2014-12-25
